【古月居《ros入门21讲》学习笔记】11_客户端Client的编程实现
目录
说明:
1. 服务模型
2. 实现过程(C++)
创建功能包
创建客户端代码(C++)
配置客户端代码编译规则
编译
运行
3. 实现过程(Python)
创建客户端代码(Python)
运行效果
说明:
1. 本系列学习笔记基于B站:古月居《ROS入门21讲》课程,且使用的Ubuntu与ROS系统版本与课程完全一致;
| 虚拟机版本 | Linux系统版本 | ROS系统版本 |
|---|---|---|
| VMware WorkStation Pro 16 | Ubuntu18.04 | Melodic |
2. 课程中的所有示例代码均已跑通,且对Pyhon版本的代码也都做了运行验证,并附带验证过程(错误均已修正);
3. 本节是整个笔记的第11节,对应视频课程的第13节,请自行对应学习;
4. 整个系列笔记基本已经完结,但部分章节仍需润色修改 ,后面会陆续发布,请大家持续关注, 创作不易,感谢支持!
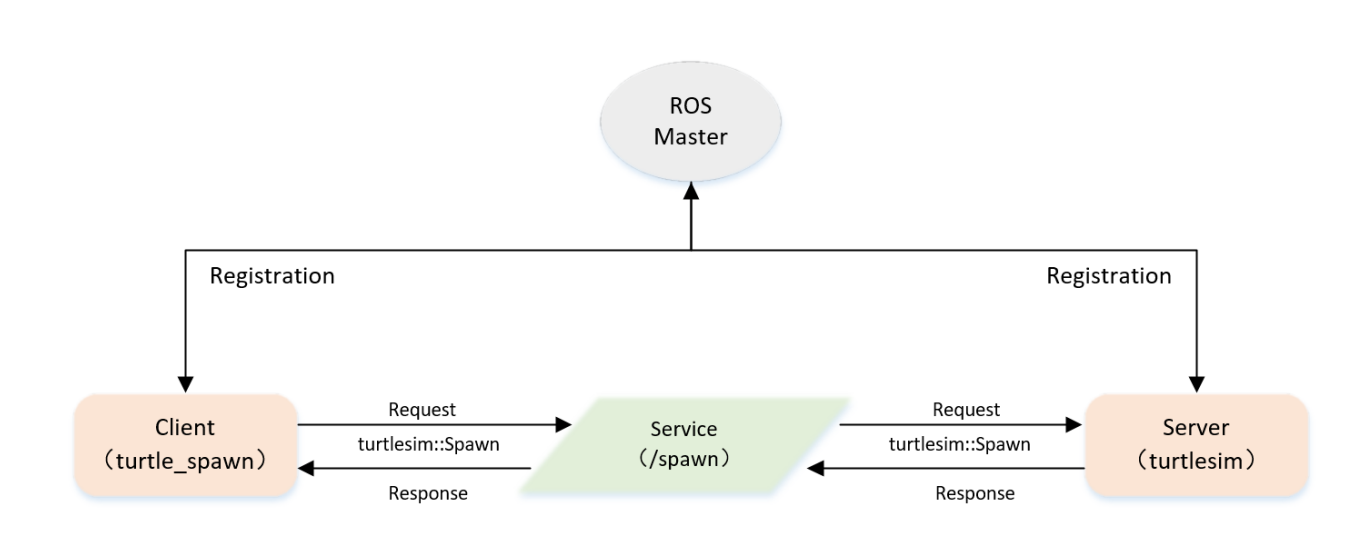
1. 服务模型
2. 实现过程(C++)
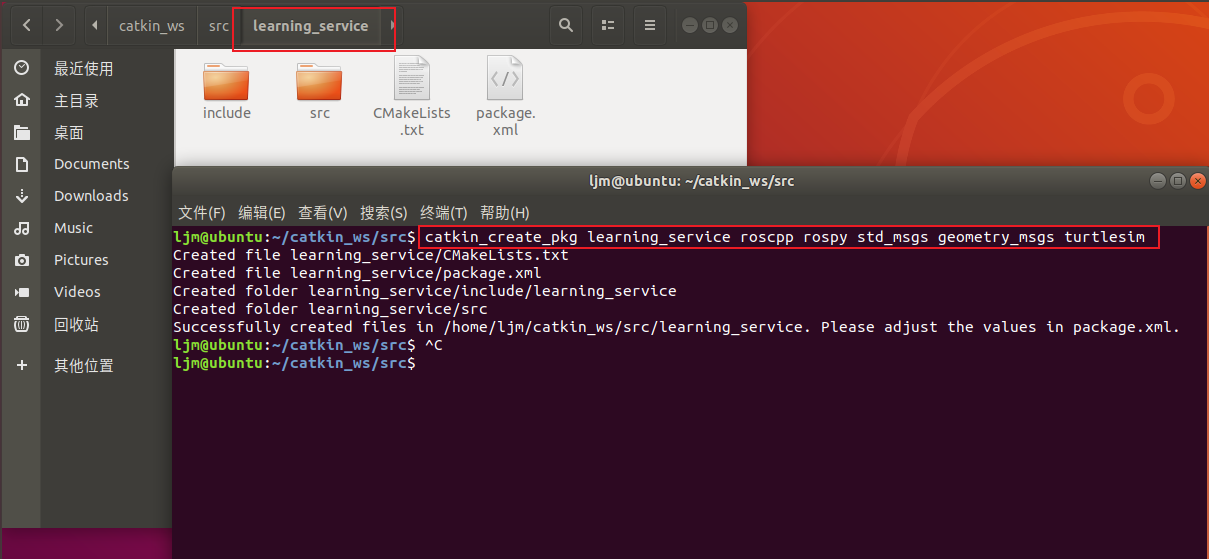
创建功能包
cd ~/catkin_ws/src catkin_create_pkg learning_service roscpp rospy std_msgs geometry_msgs turtlesim
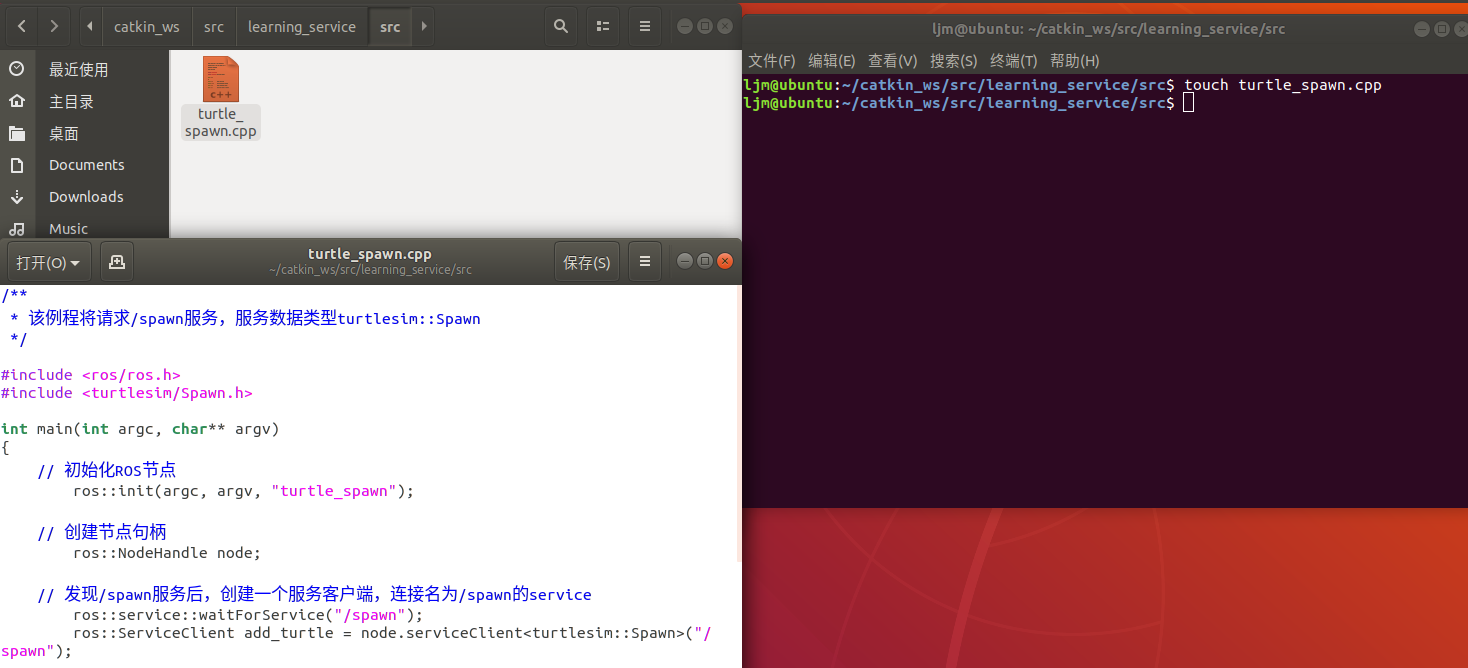
创建客户端代码(C++)
cd ~/catkin_ws/src/learning_service/src touch turtle_spawn.cpp
-
初始化ros节点;
-
创建一个Client实例;
-
发布服务请求数据;
-
等待Server处理之后的应答结果,
/*** 该例程将请求/spawn服务,服务数据类型turtlesim::Spawn*/
#include <ros/ros.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv)
{// 初始化ROS节点ros::init(argc, argv, "turtle_spawn");
// 创建节点句柄ros::NodeHandle node;
// 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的serviceros::service::waitForService("/spawn");ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("/spawn");
// 初始化turtlesim::Spawn的请求数据turtlesim::Spawn srv;srv.request.x = 2.0;srv.request.y = 2.0;srv.request.name = "turtle2";
// 请求服务调用ROS_INFO("Call service to spwan turtle[x:%0.6f, y:%0.6f, name:%s]", srv.request.x, srv.request.y, srv.request.name.c_str());
add_turtle.call(srv);
// 显示服务调用结果ROS_INFO("Spwan turtle successfully [name:%s]", srv.response.name.c_str());
return 0;
};
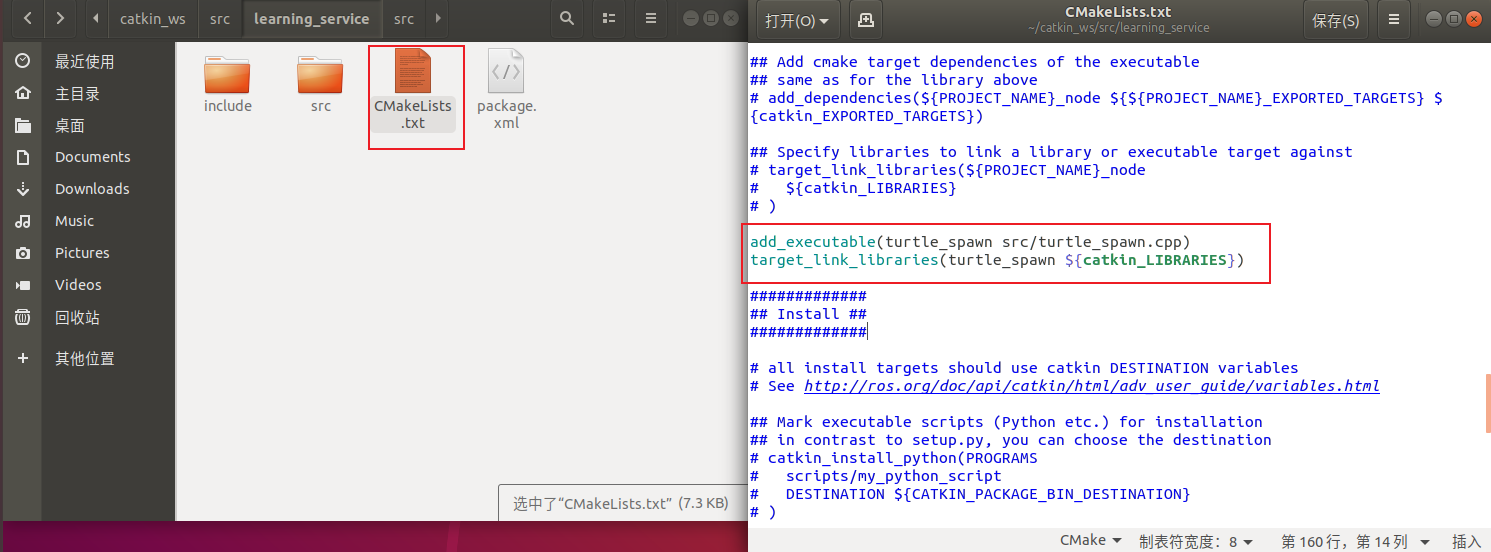
配置客户端代码编译规则
add_executable(turtle_spawn src/turtle_spawn.cpp)
target_link_libraries(turtle_spawn ${catkin_LIBRARIES})
编译
cd ~/catkin_ws catkin_make source devel/setup.bash(如已配置 **.bashrc**文件,则此步不需要,配置方法在publisher的章节里)
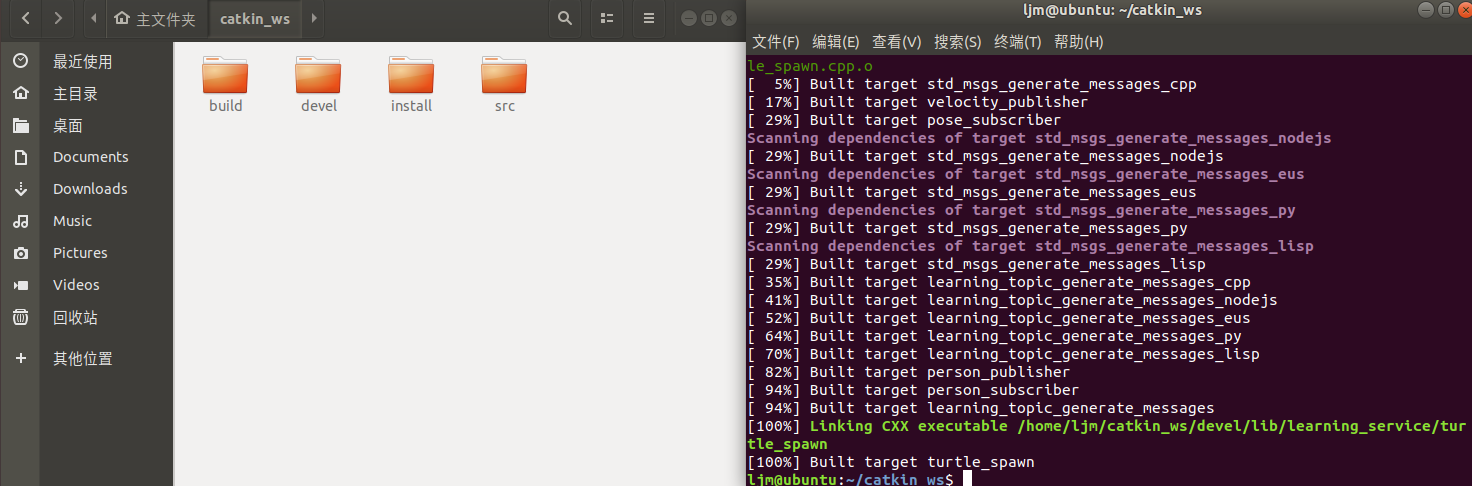
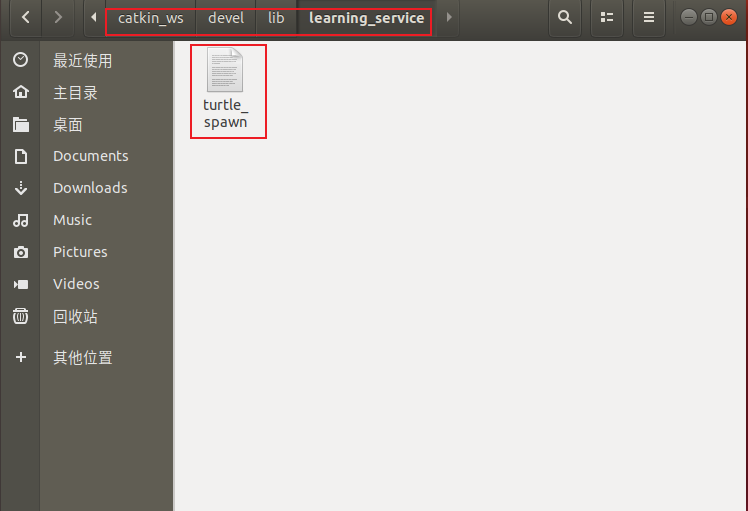
编译完成后生成的可执行文件及其位置路径如下图
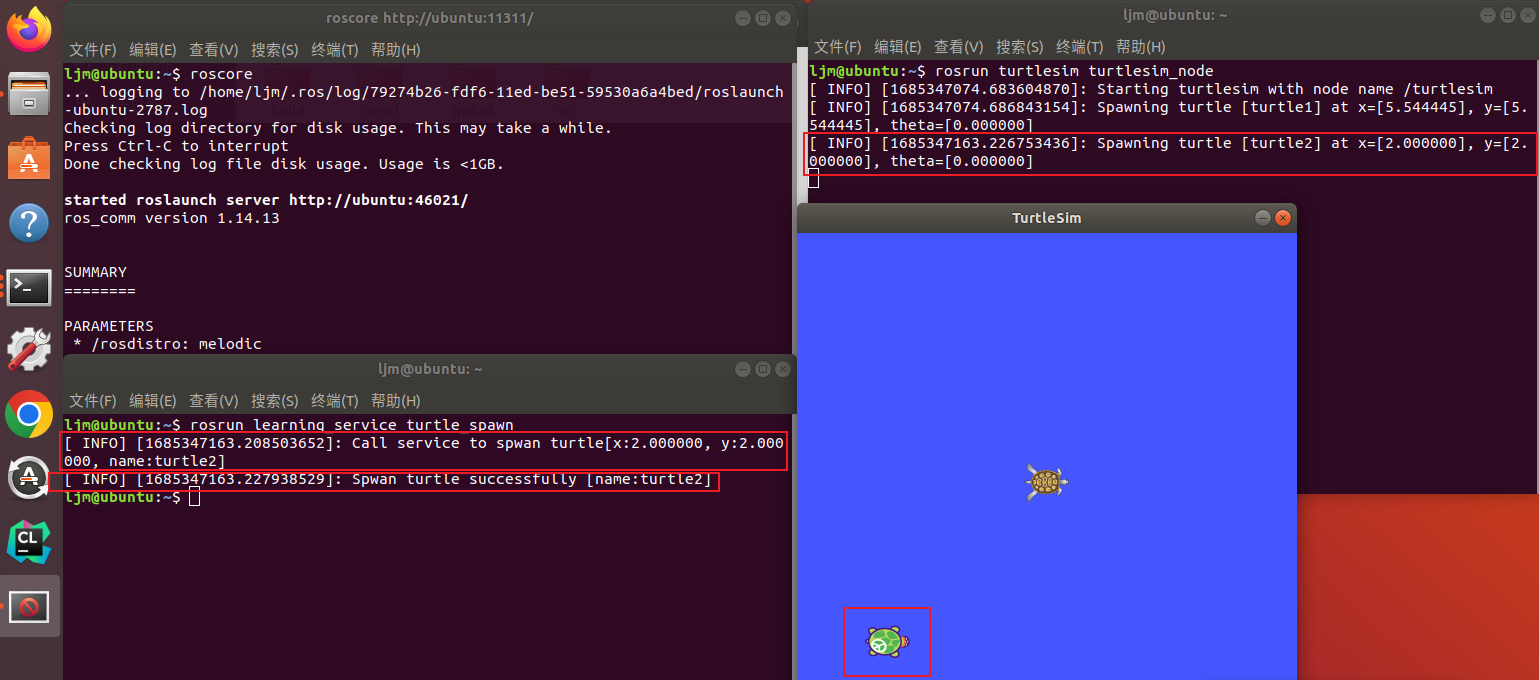
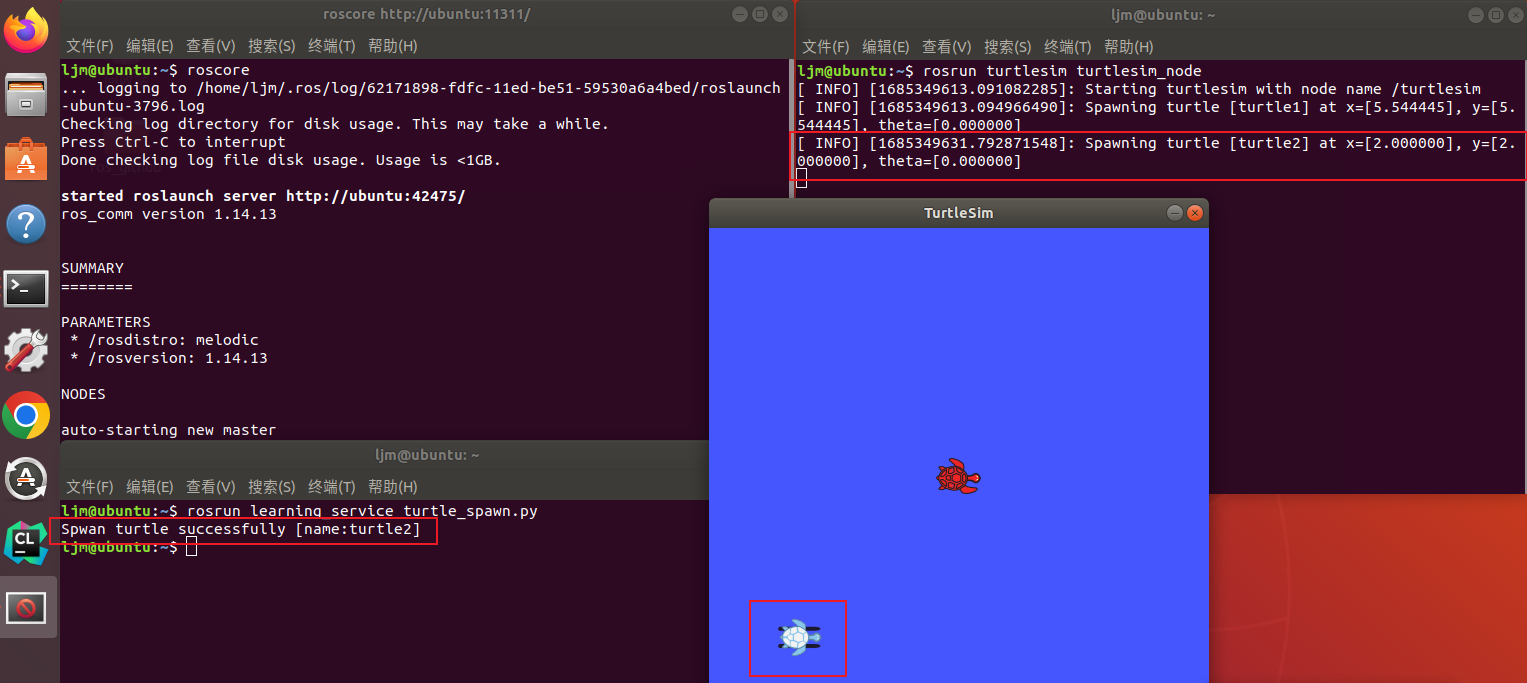
运行
roscore rosrun turtlesim turtlesim_node rosrun learning_service turtle_spawn
运行结果如下图
3. 实现过程(Python)
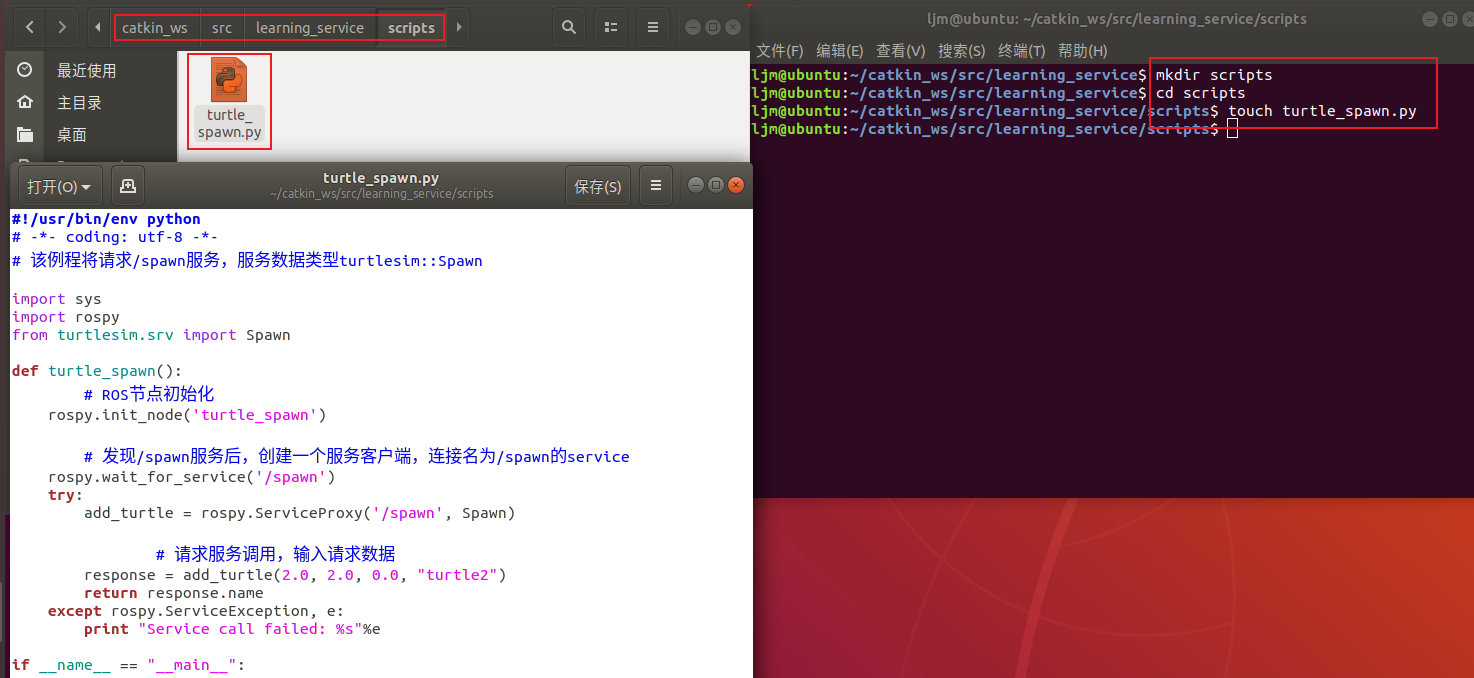
创建客户端代码(Python)
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 该例程将请求/spawn服务,服务数据类型turtlesim::Spawn
import sys
import rospy
from turtlesim.srv import Spawn
def turtle_spawn():# ROS节点初始化rospy.init_node('turtle_spawn')
# 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的servicerospy.wait_for_service('/spawn')try:add_turtle = rospy.ServiceProxy('/spawn', Spawn)
# 请求服务调用,输入请求数据response = add_turtle(2.0, 2.0, 0.0, "turtle2")return response.nameexcept rospy.ServiceException, e:print "Service call failed: %s"%e
if __name__ == "__main__":#服务调用并显示调用结果print "Spwan turtle successfully [name:%s]" %(turtle_spawn())
cd ~/catkin_ws/src/learning_service mkdir scripts cd scripts touch turtle_spawn.py
给turtle_spawn.py文件赋作为可执行文件权限
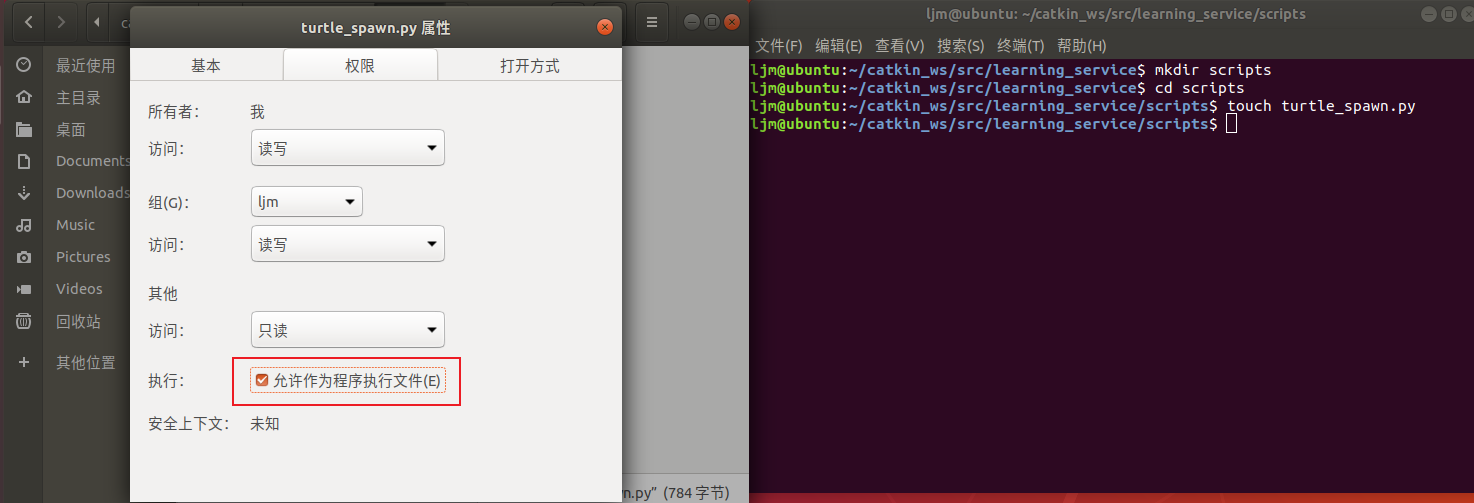
运行效果
相关文章:
【古月居《ros入门21讲》学习笔记】11_客户端Client的编程实现
目录 说明: 1. 服务模型 2. 实现过程(C) 创建功能包 创建客户端代码(C) 配置客户端代码编译规则 编译 运行 3. 实现过程(Python) 创建客户端代码(Python) 运行…...

小程序和Vue写法的区别主要有什么不同
1.语法不同:小程序使用的是WXML、WXSS和JS,而Vue使用的是HTML、CSS和JSX。 2.数据绑定方式不同:小程序使用的是双向数据绑定,而Vue使用的是单向数据流。 1)在小程序中需要使用e.currentTarget.dataset.*的方式获取&…...

Flutter之MQTT使用
1.添加依赖: 首先,需要在Flutter项目的pubspec.yaml文件中添加mqtt_client依赖。 dependencies:#https://pub.dev/packages/mqtt_clientmqtt_client: ^10.0.02.创建MQTT客户端并连接到MQTT服务器:2.创建一个MQTT客户端实例来进行连接和通信 Fu…...

vr红色教育虚拟展馆全景制作提升单位品牌形象
720全景展馆编辑平台以其独特的优势,为展览行业带来了革命性的变革。这种创新的技术应用为参展商提供了更高效、更便捷、更全面的展示解决方案,进一步提升了展览行业的水平和影响力。 一、提升展示效果,增强品牌形象 720全景展馆编辑平台通过…...
【Spring】Spring是什么?
文章目录 前言什么是Spring什么是容器什么是 IoC传统程序开发控制反转式程序开发理解Spring IoCDI Spring帮助网站 前言 前面我们学习了 servlet 的相关知识,但是呢?使用 servlet 进行网站的开发步骤还是比较麻烦的,而我们本身程序员就属于是…...

事件循环机制及常见面试题
借鉴: 《Javascript 忍者秘籍》第二版,事件循环篇 面试 | JS 事件循环 event loop 经典面试题含答案 - 知乎 (zhihu.com) 概念 主栈队列就是一个宏任务,每一个宏任务执行完就会执行宏任务中的微任务,直到微任务全部都执行完&a…...

智能监控平台/视频共享融合系统EasyCVR接入RTSP协议视频流无法播放原因是什么?
视频集中存储/云存储/视频监控管理平台EasyCVR能在复杂的网络环境中,将分散的各类视频资源进行统一汇聚、整合、集中管理,实现视频资源的鉴权管理、按需调阅、全网分发、智能分析等。AI智能/大数据视频分析EasyCVR平台已经广泛应用在工地、工厂、园区、楼…...

c# statusStrip 显示电脑主机名、IP地址、MAC地址
控件: ToolStripStatusLabel 主机名: Dns.GetHostName() IP地址: Dns.GetHostAddresses(Dns.GetHostName())[0].ToString() 当前程序的版本: Assembly.GetExecutingAssembly().GetName().Version.ToString() 获取系统版本 …...

Cesium.CustomShader颜色值显示错误
官方示例: Cesium Sandcastle 测试过程: 1、修改示例,把customshader中的fragmentShaderText替换为如下代码 void fragmentMain(FragmentInput fsInput, inout czm_modelMaterial material) {//注意:下述颜色的b值是0.1&#x…...
)
XSLVGL2.0 User Manual 页面管理器(v2.0)
XSLVGL2.0 开发手册 XSLVGL2.0 User Manual 页面管理器 1、概述2、特性3、APIs3.1、xs_page_init3.2、xs_page_wait_inited3.3、xs_page_exit3.4、xs_page_acquire3.5、xs_page_release3.6、xs_page_set_bootlogo3.7、xs_page_setup_clear_finish3.8、xs_page_setup_is_finish…...
论文学习-Attention Is All You Need
Attention Is All You Need 目前暂时不会用到,大概了解一下即可。 Recurrent model 序列化的计算方式,难以并行,随着序列的增长,以前的记忆会逐渐丢失。而Attention机制可以观察到句子中所有的信息,不受距离影响&…...

Springboot 使用 RabbitMq 延迟插件 实现订单到期未支付取消订单、设置提醒消息
示例业务场景: 场景1:客户下单后,15分钟内未支付取消订单! 场景2:客户下单支付成功后,5分钟内商家未处理订单,需要推送一条消息提醒商家。如依旧未处理,则需要每隔2分钟消息提醒一下…...
)
Linux安装Tesseract-OCR(操作系统CentOS)
Linux安装Tesseract-OCR 第一步,安装依赖第二步,下载安装包第三步,安装leptonica库第四步,安装tesseract第五步,添加语言包第六步,测试 第一步,安装依赖 sudo yum install libpng-devel rpm -q…...

pair和typedef
文章目录 一、pair用法1.2、pair的创建和初始化1.3、pair对象的操作1.4、(make_pair)生成新的pair对象1.5、通过tie获取pair元素值 2、typedef2.1、什么是typedef2.2、typedef用法2.2.1、对于数据类型使用例如:2.2.2、对于指针的使用例如2.2.3、对于结构体的使用 2.…...
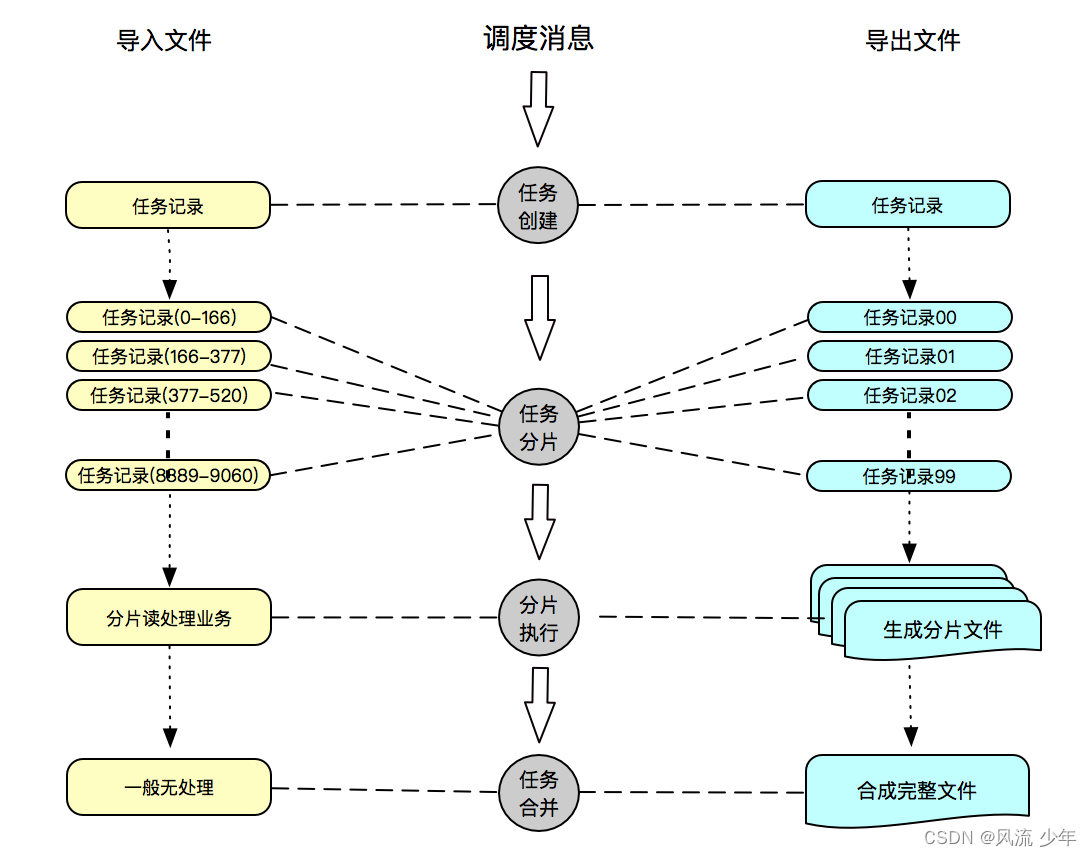
rdf-file:分布式环境下的文件处理
一:简介 数据量大了以后,单机解析或者生成文件的效率就很低,需要通过集群处理: 机构过来的文件:我们先对文件进行分片,在利用集群集群处理分片文件。给机构文件:分库分表数据,每个…...
Maven下载与安装教程
一、下载 Maven 进入 Maven 官网:maven.apache.org/download.cgi 选择 .zip 文件下载,最新版本是 3.9.5 二、安装 Maven 将 .zip 文件解压到没有中文没有空格的路径下。例如下图,在创建一个repository的空文件夹在他的下面,用于…...
:通过starts_with/ends_with检查字符串)
C++(20):通过starts_with/ends_with检查字符串
C20提供了starts_with用于检查字符串是否以某个字符串开始,ends_with用于检查是否以某个字符串结束: #include <iostream> #include <string> using namespace std;int main() {string str "hello and 88";cout<<str.star…...

YOLOv8+Nanodet强强联合改进标签分配:使用NanoDet动态标签分配策略,同时集成VFL全新损失,来打造新颖YOLOv8检测器
💡本篇内容:YOLOv8+Nanodet强强联合改进标签分配:使用NanoDet动态标签分配策略,同时集成VFL全新损失,来打造新颖YOLOv8检测器 💡🚀🚀🚀本博客 YOLO系列 + 改进NanoDet模型的动态标签分配策略源代码改进 💡一篇博客集成多种创新点改进:VFL损失函数 + Nanodet…...

base64字符串转成file
分割base64字符串,获取base64的格式和ASCII字符串;使用atob()方法将base64中的ASCII字符串解码成二进制数据"字符串";将二进制数据按位放入8 位无符号整型数组中适用new File()方法将ArrayBuffer转换成file对象 const base64 &qu…...

NextJS开发:Prisma开启SQL日志输出
在 Prisma 中打印执行的 SQL 可以通过在 PrismaClient 实例上设置 log 配置参数来实现。具体步骤如下: 在你的Prisma项目根目录中,找到 prisma/schema.prisma 文件在 datasource 块中,找到你正在使用的数据库配置,并添加 provide…...

为Hermes Agent配置Taotoken自定义供应商接入大模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为Hermes Agent配置Taotoken自定义供应商接入大模型 Hermes Agent 是一个功能强大的AI智能体开发框架,它支持通过自定义…...

审核延迟超800ms?吞吐暴跌63%?DeepSeek本地化审核引擎调优指南,7步压测达标金融级SLA
更多请点击: https://kaifayun.com 第一章:DeepSeek输出内容审核的金融级SLA挑战与现状剖析 在金融行业,模型输出内容的准确性、合规性与可追溯性并非附加要求,而是服务可用性的核心组成部分。DeepSeek系列大模型在面向银行、券商…...

长期使用Taotoken服务对于API调用稳定性的主观感受记录
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期使用Taotoken服务对于API调用稳定性的主观感受记录 在持续数月的项目开发与日常使用中,我通过Taotoken平台接入并调…...

别再踩坑了!Win10下AirSim v1.5.0 + UE4.26.2 + Python 3.7 保姆级环境搭建实录
Win10下AirSim v1.5.0 UE4.26.2 Python 3.7 避坑实战指南1. 环境配置前的关键准备在开始AirSim环境搭建之前,有几个关键点必须提前确认。我曾在不同配置的机器上反复尝试了7次安装,最终总结出这套成功率最高的方案。硬件要求检查清单:显卡&…...

如何用3个步骤建立完全私有的点对点文件同步网络?
如何用3个步骤建立完全私有的点对点文件同步网络? 【免费下载链接】syncthing-android Wrapper of syncthing for Android. 项目地址: https://gitcode.com/gh_mirrors/sy/syncthing-android 你是否曾因云端服务的隐私隐患而犹豫不决?是否厌倦了每…...

OpenSSH协议层隐藏版本号实战指南
1. 为什么连OpenSSH版本号都要藏?这不是小题大做很多人第一次听说“要隐藏SSH版本号”,第一反应是:这玩意儿不就是个登录提示吗?又不是密码,至于这么紧张?我刚入行那会儿也这么想。直到有次在客户现场做渗透…...

如何为《植物大战僵尸》实现终极宽屏补丁:3个关键技术解析
如何为《植物大战僵尸》实现终极宽屏补丁:3个关键技术解析 【免费下载链接】PvZWidescreen Widescreen mod for Plants vs Zombies 项目地址: https://gitcode.com/gh_mirrors/pv/PvZWidescreen 《植物大战僵尸》作为经典塔防游戏,在宽屏显示器上…...

.NET Windows Desktop Runtime终极指南:如何彻底解决Windows桌面应用部署难题?
.NET Windows Desktop Runtime终极指南:如何彻底解决Windows桌面应用部署难题? 【免费下载链接】windowsdesktop 项目地址: https://gitcode.com/gh_mirrors/wi/windowsdesktop 在Windows桌面应用开发领域,最令人头疼的问题往往不是代…...

Cursor Free VIP:AI编程助手Pro功能永久免费的技术解决方案
Cursor Free VIP:AI编程助手Pro功能永久免费的技术解决方案 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached you…...

5分钟掌握MelonLoader:全球首个支持Il2Cpp和Mono的Unity游戏模组加载器
5分钟掌握MelonLoader:全球首个支持Il2Cpp和Mono的Unity游戏模组加载器 【免费下载链接】MelonLoader The Worlds First Universal Mod Loader for Unity Games compatible with both Il2Cpp and Mono 项目地址: https://gitcode.com/gh_mirrors/me/MelonLoader …...