Gazebo 中为地面和车轮添加摩擦属性
Gazebo 中为地面和车轮添加摩擦属性
Link friction properties not applied from URDF to Gazebo
SDFormat Specification
Adding friction to model wheels
Gazebo中模型自行滑动(后溜)的原因探究
移动机器人在仿真时,一旦以较大的速度启动,就会翘头导致翻车
考虑是没有地面摩擦力,因此尝试地面和车轮添加摩擦属性
地面的摩擦系数在 SDF 文件中配置,参考 cafe.world 编辑 empty.world
<sdf version='1.6'><world name='default'><model name='ground_plane'><static>1</static><link name='link'><collision name='collision'><geometry><plane><normal>0 0 1</normal><size>100 100</size></plane></geometry><surface><friction><ode><mu>1</mu><mu2>0.9</mu2></ode><torsional><ode/></torsional></friction><contact><ode/></contact><bounce/></surface><max_contacts>10</max_contacts></collision><visual name='visual'><cast_shadows>0</cast_shadows><geometry><plane><normal>0 0 1</normal><size>100 100</size></plane></geometry><material><script><uri>file://media/materials/scripts/gazebo.material</uri><name>Gazebo/Grey</name></script></material></visual><self_collide>0</self_collide><kinematic>0</kinematic></link></model><light name='sun' type='directional'><cast_shadows>1</cast_shadows><pose frame=''>0 0 10 0 -0 0</pose><diffuse>0.8 0.8 0.8 1</diffuse><specular>0.2 0.2 0.2 1</specular><attenuation><range>1000</range><constant>0.9</constant><linear>0.01</linear><quadratic>0.001</quadratic></attenuation><direction>-0.5 0.1 -0.9</direction></light><gravity>0 0 -9.8</gravity><magnetic_field>6e-06 2.3e-05 -4.2e-05</magnetic_field><atmosphere type='adiabatic'/><physics name='default_physics' default='0' type='ode'><max_step_size>0.001</max_step_size><real_time_factor>1</real_time_factor><real_time_update_rate>1000</real_time_update_rate></physics><scene><ambient>0.4 0.4 0.4 1</ambient><background>0.7 0.7 0.7 1</background><shadows>1</shadows></scene><spherical_coordinates><surface_model>EARTH_WGS84</surface_model><latitude_deg>0</latitude_deg><longitude_deg>0</longitude_deg><elevation>0</elevation><heading_deg>0</heading_deg></spherical_coordinates></world>
</sdf>
<surface>: 定义碰撞元素的物理属性<friction>: 描述碰撞表面的摩擦属性<ode>: 使用ODE作为物理引擎<mu>1.0</mu>: 静摩擦系数<mu2>1.0</mu2>: 动摩擦系数
<contact>: 描述碰撞元素的接触属性
<max_contacts>10</max_contacts>: 设置最大接触数
在URDF中配置链接(link)的摩擦属性可以使用 <gazebo> 元素,其中包含 <mu1> 和 <mu2> 元素来指定静摩擦系数和动摩擦系数
<link name="my_link"><!-- 其他链接属性 --><gazebo><mu1>0.5</mu1> <!-- 静摩擦系数 --><mu2>0.3</mu2> <!-- 动摩擦系数 --></gazebo><!-- 其他链接元素,如碰撞、视觉等 -->
</link>
为地面和车轮添加摩擦属性后效果几乎没有,将整车质量由 100kg 调整为 150kg,并且将 base_link 和 steer_link 的重心下移后,在 0.5m/s 及以下速度启动不会有翘头现象
相关文章:

Gazebo 中为地面和车轮添加摩擦属性
Gazebo 中为地面和车轮添加摩擦属性 Link friction properties not applied from URDF to Gazebo SDFormat Specification Adding friction to model wheels Gazebo中模型自行滑动(后溜)的原因探究 移动机器人在仿真时,一旦以较大的速度启动&…...

【重点】【滑动窗口】3. 无重复字符的最长子串
题目 参考《算法小抄》重的解法,重点理解!!! class Solution {public int lengthOfLongestSubstring(String s) {if (s.length() < 2) {return s.length();}char[] array s.toCharArray();int left 0, right 0, res 0;int…...
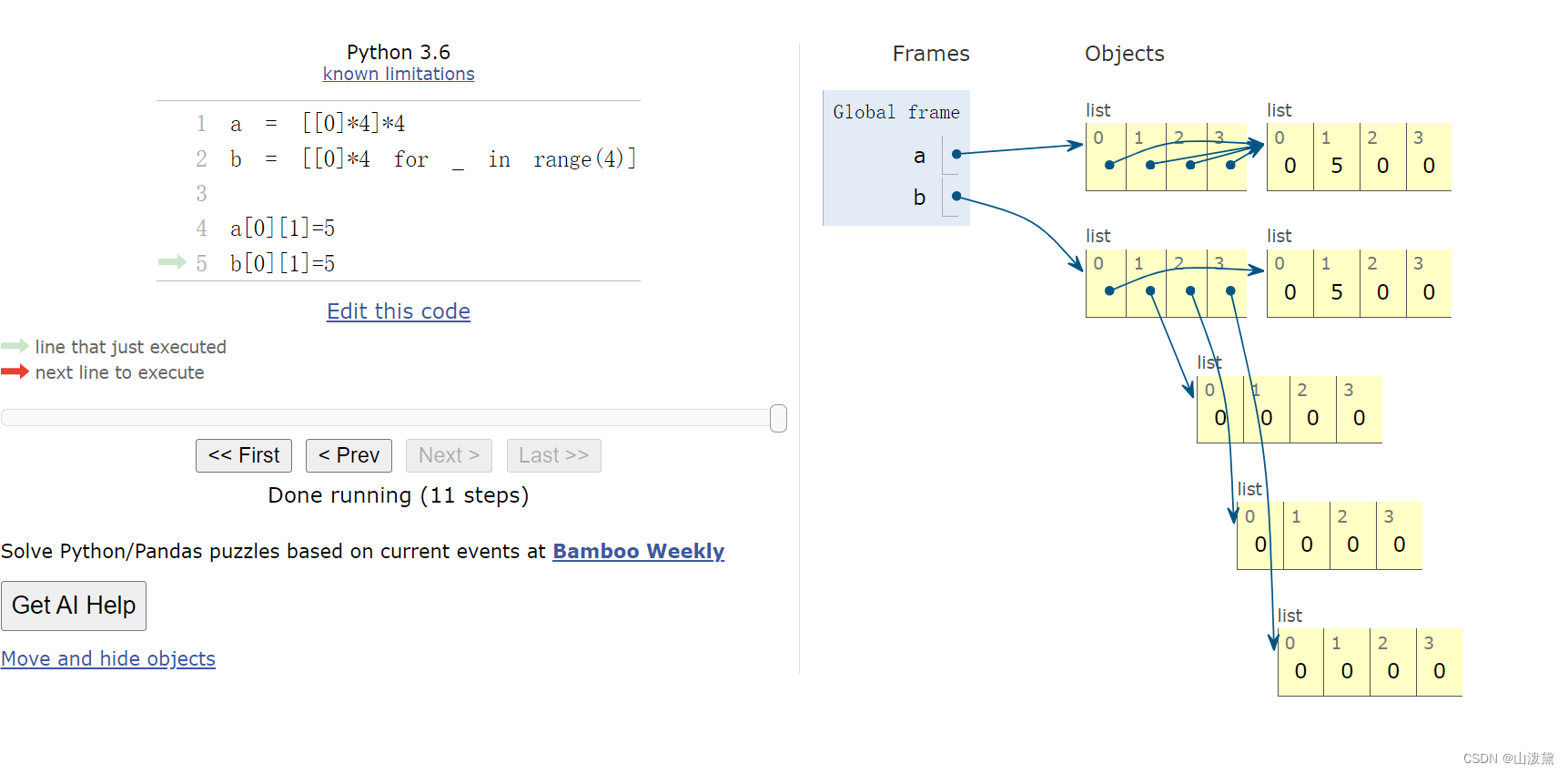
python初始化矩阵相关
做算法题经常需要初始化一个二维的dp数组 下面两种方法是最常用的 matrix [[0]*n]*n matrix [[0]*n for _ in range(n)]以前经常混用也没发现什么问题,直到昨天debug的时候发现第一种初始化之后对矩阵进行赋值时混乱的,比如matrix[0][1]2会导致所有行…...

C++ :运算符重载
运算符重载: 运算符重载概念:对已有的运算符重新进行定义,赋予其另一种功能,以适应不同的数据类型 运算符的重载实际是一种特殊的函数重载,必须定义一个函数,并告诉C编译器,当遇到该重载的运算符…...
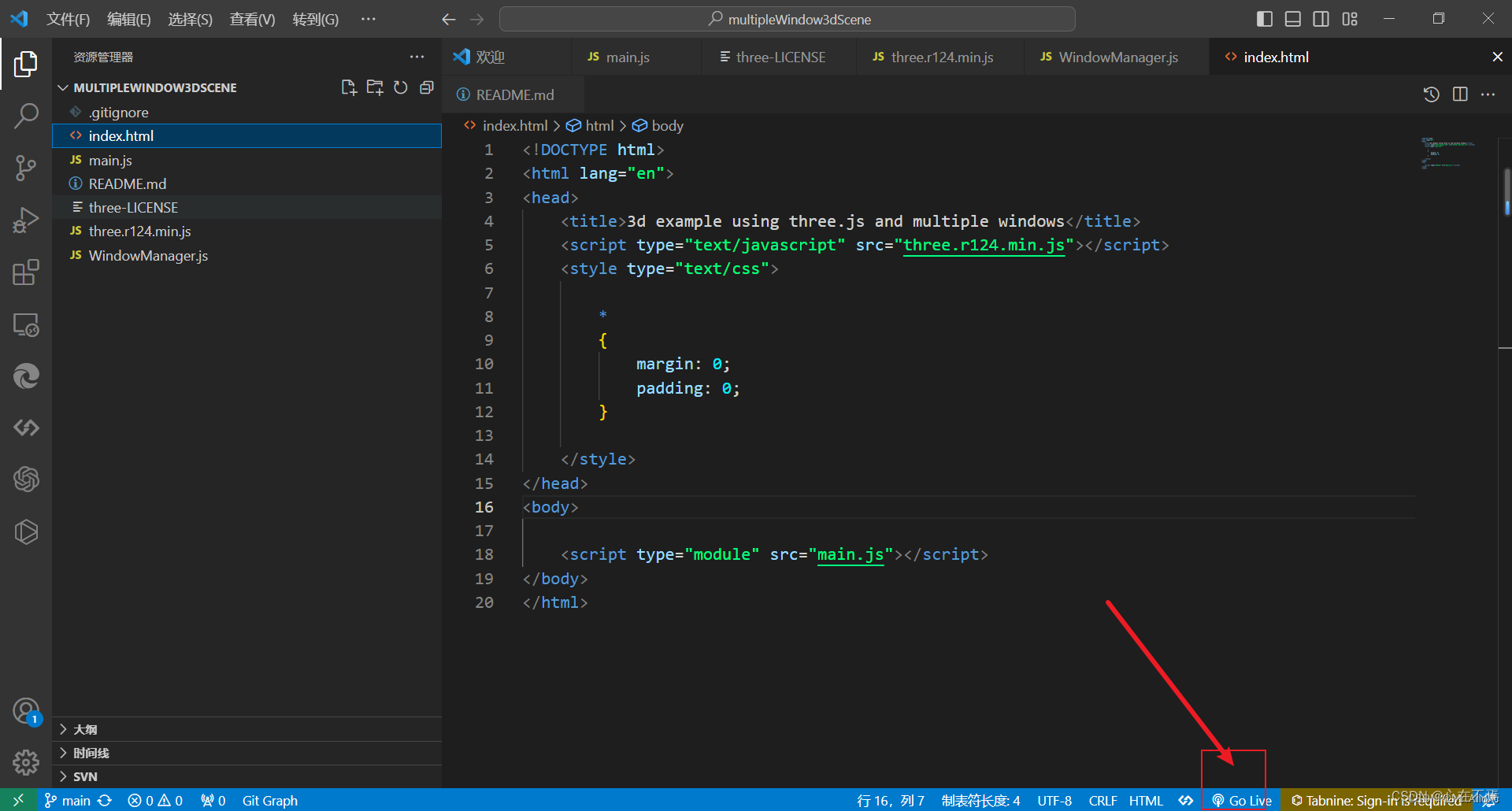
如何跑通跨窗口渲染:multipleWindow3dScene
New 这是一个跨窗口渲染的示例,用 Three.js 和 localStorage 在同一源(同产品窗口)上跨窗口设置 3D 场景。而这也是本周推特和前端圈的一个热点,有不少人在争相模仿它的实现,如果你对跨窗口的渲染有兴趣,可…...

flutter-web中使用js工具类
文章目录 为什么要调用js1. flutter-web1. 引入js web/index.html2. 创建工具js web/CryptoEnc.js3. 创建对应的lib/js/js_interop.dart4. 由于引入的js是针对web平台的,所以引入需要做引入处理5. 使用 2. Android1. 引入依赖2. index.html3. dart引用 为什么要调用…...

@ResponseBody详解:用于响应体响应数据
RestFul风格或者是web阶段接触过的异步请求,都需要把数据转换成Json放入响应体中。 ResponseBody的作用其实是将java对象转为json格式的相应内容 使用 RequestMapping注解时,Spring会将返回值解析为视图路径,然后跳转路径返回对应的视图页面…...

【Python百练——第3练】矩形类及操作
💐作者:insist-- 💐个人主页:insist-- 的个人主页 理想主义的花,最终会盛开在浪漫主义的土壤里,我们的热情永远不会熄灭,在现实平凡中,我们终将上岸,阳光万里 ❤️欢迎点…...

【C语言学习疑难杂症】C语言中数组存储时为什么从低地址到高地址
在C语言中,数组的存储从低地址到高地址是有其历史原因的。这种设计主要是为了与计算机系统的内存组织方式相一致。 在计算机系统中,内存通常按照字节进行编址,地址从低到高递增。数组在内存中是连续存储的,因此数组的第一个元素&…...

Linux:查看端口占用的进程
命令 netstat -tunlp可以从图中看到,端口被那个进程占用,对应进程的pid是多少。...
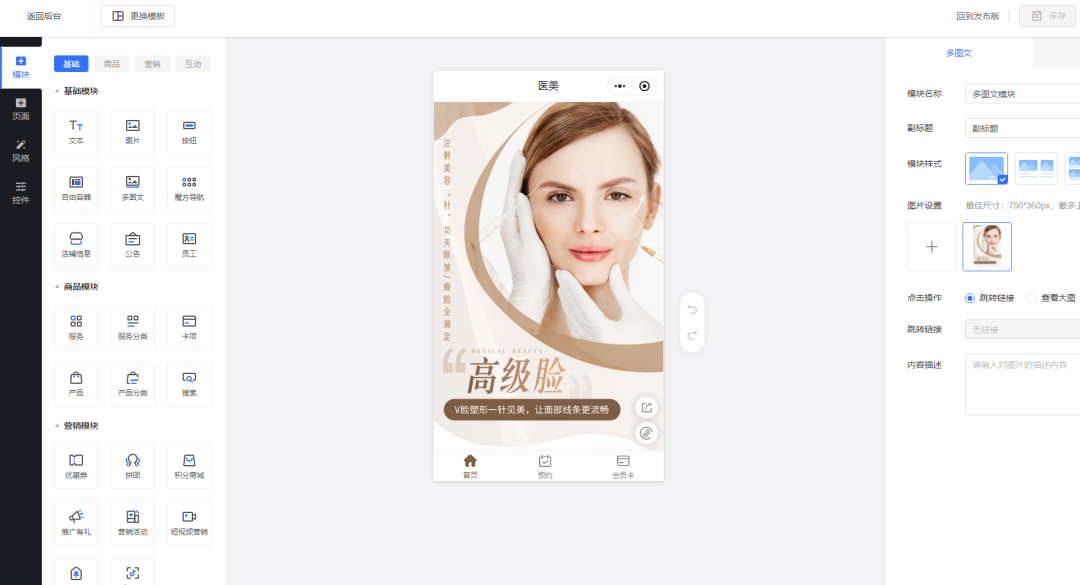
医美店会员管理系统预约小程序作用是什么
医美在美业中占据着一定地位,爱美使然和经济独立、悦己消费下,不少女性会前往医美机构做脸部整容、嫩肤补水等服务,如美容院一样都是具备本地外地属性的,因此在如今互联网盛行下,商家需要借势线上破解难题及增强生意效…...
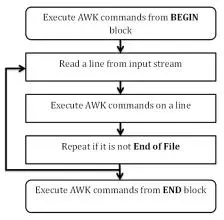
Linux 正则表达式
内容概述 1 文本编辑工具之神 VIM 1.1 vi 和 vim 简介 在 Linux 中我们经常编辑修改文本文件,即由 ASCII Unicode 或者其他编码的纯文字的文件。之前介绍过的 nano,实际工具中我们使用更为专业,功能强大的工具 文本编辑种类: vi…...

C语言面试之数组指针上篇
C语言数组是C语言中重要的数据结构之一,它用于存储一组相同类型的数据。数组在C语言中是以连续的内存空间来存储的,每个数组元素都是一个变量,占据一定的内存空间,数组元素之间是紧密相邻的。 一、数组的定义 在C语言中࿰…...

LinkWeChat,唯一以开源为核心的SCRM
LinkWeChat是国内首个基于企业微信的开源SCRM,在集成了企微强大的开放能力的基础上,进一步升级拓展灵活高效的客户运营能力及多元化精准营销能力,让客户与企业之间建立强链接,帮助企业提高客户运营效率,强化营销能力&a…...
Android textView 显示: STRING_TOO_LARGE
在Android中,字符串资源的长度限制是32KB,getString()方法返回的字符串资源的大小超过这个限制,就会抛出STRING_TOO_LARGE 这个错误。 我本地的临界值是:32.3 KB (33,090 字节) 小于等于33090时,能正常显示ÿ…...
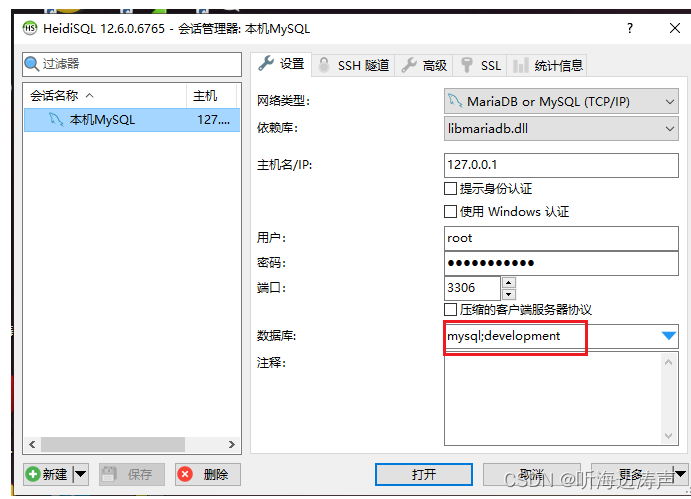
用HeidiSQL在MySQL中创建新的数据库
用有权限的用户登录: 右键单击,选择: 输入要创建的数据库名称,然后点击“确定”: 刷新下,就看到新创建的数据库了: 在新创建的数据库中,就可以做其它操作了,例如…...

纯前端实现导入excel数据
准备工作 - 下载 xlsx npm install xlsx下面直接上代码👇 <template><div><input type"file" accept".xlsx, .xls" change"handleClick"></div> </template><script langts setup> import * a…...
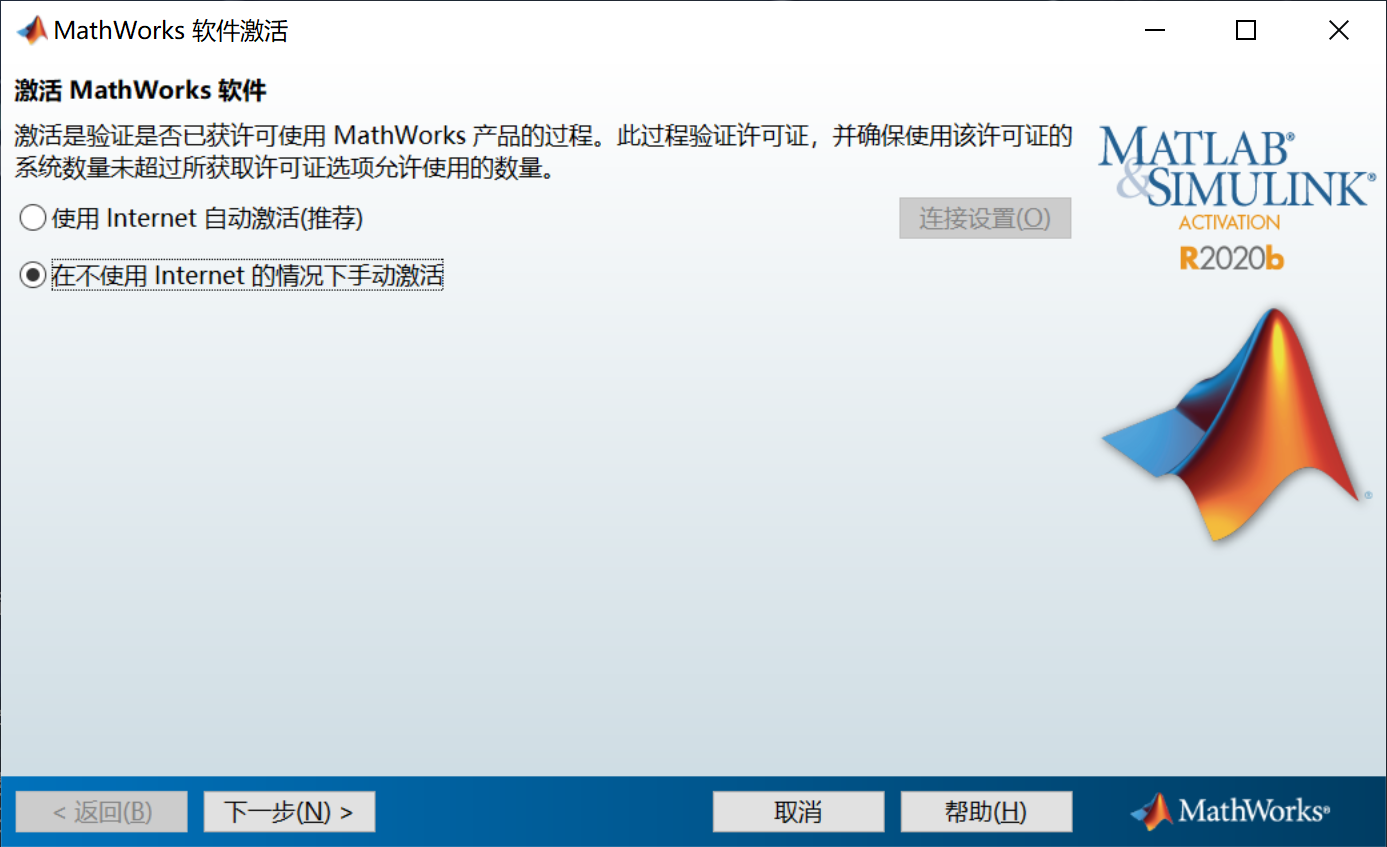
Matlab下载许可证文件 教程(在账号有许可证的前提下)
文章目录 Part.I IntroductionPart.II 许可证文件过期解决方案Chap.I 使用 Internet 自动激活Chap.II 在不使用 Internet 的情况下手动激活 Part.I Introduction 本文主要介绍,在 Mathwork 账号有许可证的前提下,下载许可证的操作流程。 好久没有用 Mat…...

AI 绘画 | Stable Diffusion 电商模特
前言 上一篇文章讲到如何给人物更换背景和服装。今天主要讲电商模特,就是服装电商们的固定服装产品图片如何变成真人模特穿上的固定服装产品效果图。如果你掌握了 《AI 绘画 | Stable Diffusion 人物 换背景|换服装》,这篇文章对你来说,上手会更轻松。 教程 提取服装蒙版…...
)
vue面试题整理(1.0)
一、对MVC,MVP,MVVM的理解 三者都是项目的架构模式(不是类的设计模式),即:一个项目的结构,如何分层,不同层负责不同的职责。 1.MVC MVC的出现是用在后端(全栈时代&…...

【Midjourney钯金印相风格终极指南】:20年影像工艺专家亲授——从化学印相原理到AI提示词精准转译的7步闭环工作流
更多请点击: https://intelliparadigm.com 第一章:钯金印相工艺的百年历史溯源与数字复兴语境 钯金印相(Platinum/Palladium Printing)诞生于19世纪末,是摄影史上最具质感与耐久性的手工印相工艺之一。其以铂族金属盐…...

从0到1搭建AI心理健康预警系统:我是如何用BERT+BiLSTM捕捉情绪拐点的
一、 痛点:为什么通用大模型干不了这活?首先声明,我们不是大模型黑。但在心理预警这个场景下,直接用GPT-4或者文心一言的API,有三个致命伤:成本炸裂: 每天几万条的学生/员工咨询日志ÿ…...

现代C++中的音频引擎缓冲调度实践
现代C中的音频引擎缓冲调度实践音频引擎与普通后台任务系统不同,它更强调稳定时序和低抖动。哪怕平均性能很好,只要某次回调超时,就会产生爆音、卡顿或丢帧。因此 C 音频处理的重点往往是缓冲调度和实时约束。一个简化的音频回调接口…...
)
独家解密:ElevenLabs匈牙利语模型训练数据源(含布达佩斯大学语料库授权细节与音系学标注规范)
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs匈牙利语语音模型的技术定位与战略意义 ElevenLabs 匈牙利语语音模型并非简单的地方语言适配,而是其多语言零样本语音合成(Zero-Shot Voice Cloning)架构在…...
)
仅限首批200位开发者获取:ElevenLabs未公开的僧伽罗文Fine-tuning API沙箱权限+定制音色训练模板(含Kandy方言语料集)
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs僧伽罗文语音合成的技术突破与本地化意义 ElevenLabs 在 2024 年首次将僧伽罗文(Sinhala)纳入其多语言语音合成支持矩阵,标志着南亚高复杂度音节文字系统在…...

MegSpot视觉对比工具:3个专业级视觉分析难题的终极解决方案
MegSpot视觉对比工具:3个专业级视觉分析难题的终极解决方案 【免费下载链接】MegSpot MegSpot是一款高效、专业、跨平台的图片&视频对比应用 项目地址: https://gitcode.com/gh_mirrors/me/MegSpot 作为一名视觉内容创作者或质量检测人员,你是…...

自建个人数字图书馆:基于Go+Vue+SQLite的Alexandria部署与优化指南
1. 项目概述:一个现代数字图书馆的诞生如果你和我一样,是个重度数字内容爱好者,硬盘里塞满了从各种渠道收集的电子书、论文、技术文档、漫画,甚至是整理好的网页存档,那你一定体会过那种“找东西”的痛苦。文件散落在不…...

终极解决方案:让苹果触控板在Windows上获得原生级精准触控体验
终极解决方案:让苹果触控板在Windows上获得原生级精准触控体验 【免费下载链接】mac-precision-touchpad Windows Precision Touchpad Driver Implementation for Apple MacBook / Magic Trackpad 项目地址: https://gitcode.com/gh_mirrors/ma/mac-precision-tou…...

Linux服务器安全基线自动化实践:基于Ansible的加固方案
1. 项目概述与核心价值“安全加固”这个词,对于任何一个负责线上系统运维、应用部署或者个人服务器管理的朋友来说,都绝不陌生。它就像给自家房子装防盗门、安监控一样,是基础且必要的工作。然而,现实情况往往是:我们面…...

终极指南:如何用BookGet快速下载全球50+图书馆古籍资源
终极指南:如何用BookGet快速下载全球50图书馆古籍资源 【免费下载链接】bookget bookget 数字古籍图书下载工具。 项目地址: https://gitcode.com/gh_mirrors/bo/bookget BookGet是一款强大的数字古籍图书下载工具,支持全球50多个知名数字图书馆的…...