泊车功能专题介绍 ———— 汽车全景影像监测系统性能要求及试验方法(国标未公布)
文章目录
- 术语和定义
- 一般要求
- 功能要求
- 故障指示
- 性能要求
- 响应时间
- 图像时延
- 单视图视野范围
- 平面拼接视图视野
- 平面拼接效果
- 总体要求
- 行列畸变
- 拼接错位及拼接无效区域
- 试验方法
- 环境条件
- 仪器和设备
- 车辆条件
- 系统响应时间试验
- 图像时延试验
- 单视图视野范围试验
- 平面拼接视图视野试验
- 平面拼接效果试验
- 试验准备
- 视图采集
- 行列畸变评价
- 拼接错位和拼接无效区域评价
- 拼接错位计算
- 拼接无效区域及占比计算
术语和定义
1. 全景影像监测系统 —— AVMS(around view monitoring system) 向驾驶员提供车辆周围360°范围内环境的实时影像信息的系统。
2. 系统盲区 —— 因摄像头布置和车身结构限制等原因,系统无法监测到的车辆周边区域。
3. 单视图 —— 对某一路摄像头采集的图像进行单独显示的视图。单视图可分为前单视图、后单视图、左单视图、右单视图。
4. 平面拼接视图 —— 将各路摄像头采集的图像处理得到的一幅显示车辆周边环境信息的平面视图。
5. 拼接缝隙 —— 在平面拼接视图中,相邻摄像头采集的图像在拼接后产生的图像缝隙,如图所示。

6. 拼接错位 —— 在平面拼接视图中,相邻摄像头采集的图像在拼接后图像显示位置的偏移,如图所示。

7. 拼接重影 —— 在平面拼接视图中,相邻摄像头采集的图像在拼接后图像的叠加显示,如图所示。
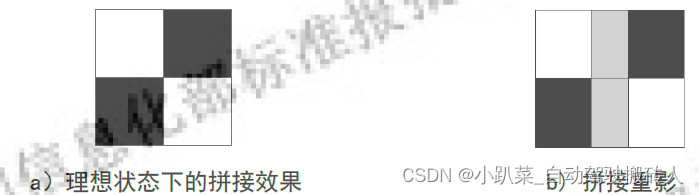
8. 拼接损失 —— 在平面拼接视图中,相邻摄像头采集的图像在拼接后图像的部分丢失,如图所示。

一般要求
功能要求
1. 车辆在启动状态下,应至少在进入倒车挡位时在显示屏中立即清晰地显示车辆周围环境的实时影像信息。
2. 系统应能输出平面拼接视图,且应满足以下要求:
2.1 M 类、N1类车辆的系统支持360°范围内视图拼接
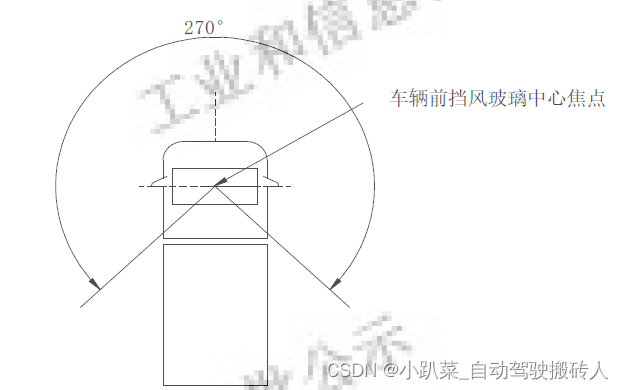
2.2 N2类、N3类车辆的系统至少支持如图所示的270°范围内视图拼接,且为新增摄像头留有接口,以补充后部视野显示。
3. 平面拼接视图中,车辆模型应车头竖直朝上布置,宜水平居中,不应出现明显的偏移或倾斜,垂直方向可有适当的偏移。
4. 系统应具备输出单视图的功能,并满足以下要求
4.1 类、N1类车辆显示前单视图、后单视图、左单视图和右单视图;
4.2 N2类、N3类车辆至少显示前单视图、左单视图和右单视图
故障指示
系统应至少以光学信号的方式提示驾驶员系统故障,该故障信号可与其他系统共用文字、图形或位置。
性能要求
响应时间
按下文方式进行试验,系统响应时间应不大于3s。
图像时延
按下文方式进行试验,系统输出的图像时延应不大于0.3s。
单视图视野范围
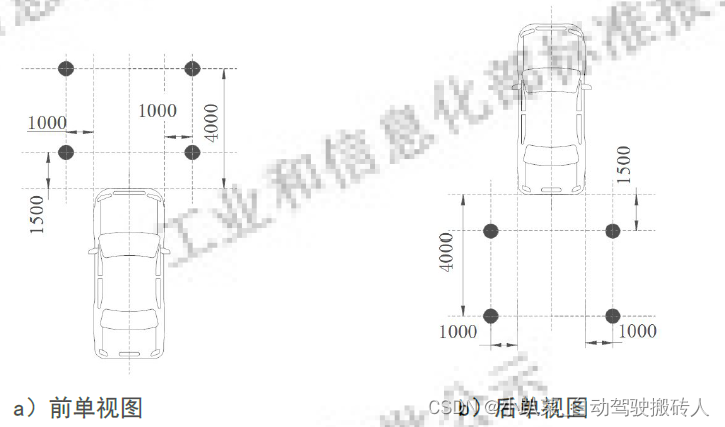
按下文方式进行试验,系统各单视图视野应满足以下要求:
前、后单视图:完全观测到距离车身前后外边缘1500 mm 和4000 mm,离车身外侧1000 mm 处的全部标志物
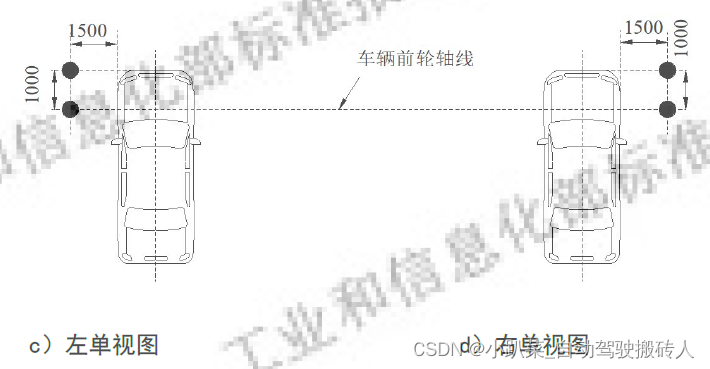
左、右单视图:完全观测到距离车身外相应侧1500 mm,前轮轴线上及距前轮轴线纵向距离1000 mm 处的全部标志物
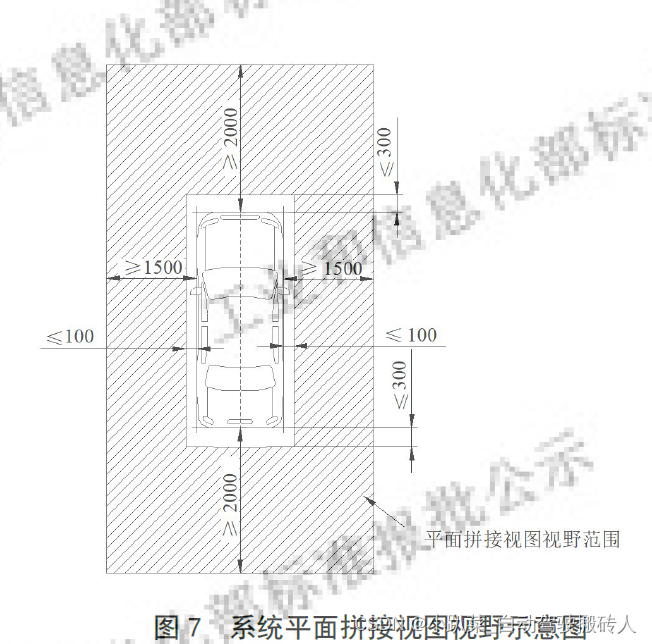
平面拼接视图视野
按下文方式进行试验,车辆中轴线上各方向的系统盲区应满足:
前、后侧分别距离车身前、后边缘的实际距离不大于300 mm;
左、右侧分别距离车身左、右边缘的实际距离不大于100 mm。
按下文方式进行试验,车辆中轴线上各方向的最远视野应满足:
前、后侧分别距离车身前、后边缘的实际距离不小于2000 mm;
左、右侧分别距离车身左、右边缘的实际距离不小于1500 mm。
平面拼接效果
总体要求
平面拼接视图中不应出现拼接缝隙,且拼接效果应至少满足下文中的《行/列畸变》或《拼接错位及拼接无效区域》任意一个。
行列畸变
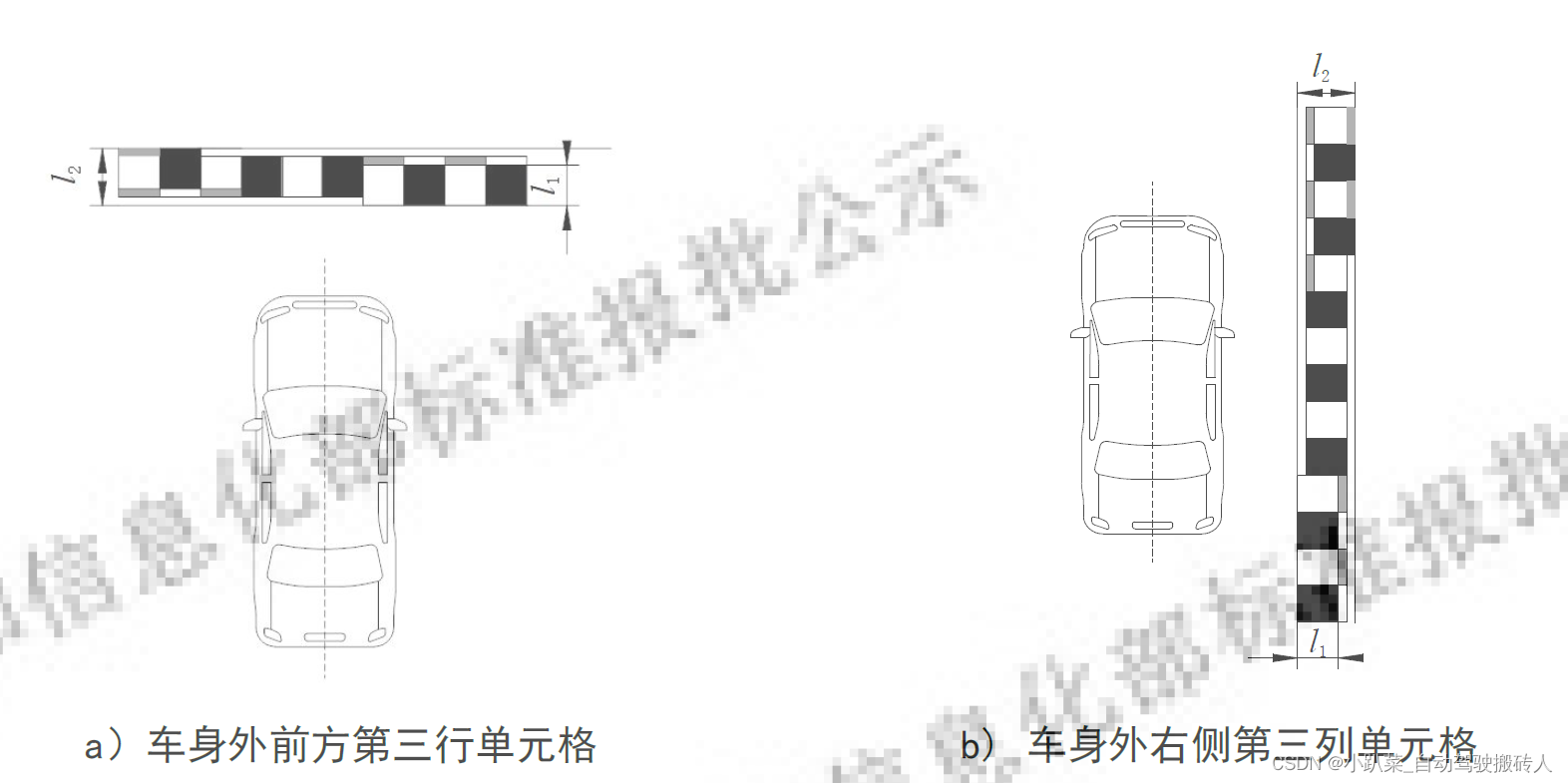
按下文的进行试验,平面拼接视图中,位于车身外第三行/列单元格的累计宽度应不大于视图中棋盘格单元格边长的1.5倍,即如图8所示,平面拼接视图应满足l2不大于1.5倍的l1。
说明:
l1 —— 棋盘格图卡单元格在图像上的边长,单位为毫米(mm)
l2 —— 第三行/列单元格距离车身相应侧外边缘的最远点与最近点的距离,单位为毫米(mm)。
拼接错位及拼接无效区域
按照下文方式进行试验,M1类车辆平面拼接视图的各拼接错位对应的实际距离应不大于0.15 m,其他类车辆平面拼接视图的各拼接错位对应的实际距离应不大于0.3 m。
在平面拼接视图中拼接重影和拼接损失产生的面积视为拼接无效区域,按下文方式进行试验,平面拼接视图中拼接无效区域对应实际面积应不大于《平面拼接视图视野》中要求的系统拼接视图视野的3%,任意田字格排布的四个单元格的拼接无效区域对应实际面积应不大于0.15 m2。
试验方法
环境条件
试验应按下列环境条件进行:
1. 试验场地为干燥平坦的沥青或混凝土路面;
2. 试验环境温度范围为-20℃~+45℃之间;
3. 水平能见度不小于1 km;
4. 试验区域内环境照明均匀分布,且覆盖系统的拼接视野范围,照度不低于800 lux,不高于100000 lux。
仪器和设备
试验用测量仪器及设备应满足以下要求:
1. 试验用计时器精度至少为0.01 s;
2. 单视图视野范围试验所用标志物为高度0.8 m,直径0.3 m 的圆柱体;
3. 平面拼接视图视野试验所用标志物为宽度为15 mm~20 mm、长度为500 mm 的平面标志物;
4. 平面拼接效果试验用棋盘格图卡单元格边长为300 mm;
5. 图像采集设备分辨率不小于系统有效显示区域的分辨率。
车辆条件
应在试验车辆整车整备质量加上驾驶员和试验设备的总质量的状态下进行试验,驾驶员和试验设备的总质量不超过150 kg,试验开始后不应对车辆载荷进行任何调整。对于装备了可调空气悬架等影响车辆高度的部件的车辆,应将相关部件调整至车辆制造商设定的出厂状态。
系统响应时间试验
车辆处于闭锁状态,并确保所有电子系统均已停用,或保证车辆闭锁至少30 min。测试人员解锁车辆,该时间点记为t0,测试人员进入车内,系上安全带,启动车辆,进入倒车挡位,该时间点记为t1,t0至t1 应控制在12s~15s内。系统输出实时影像信息时间点记为t1,单次试验中系统响应时间为t2与t1的差值。重复上述试验三次,系统响应时间t取三次试验平均值。
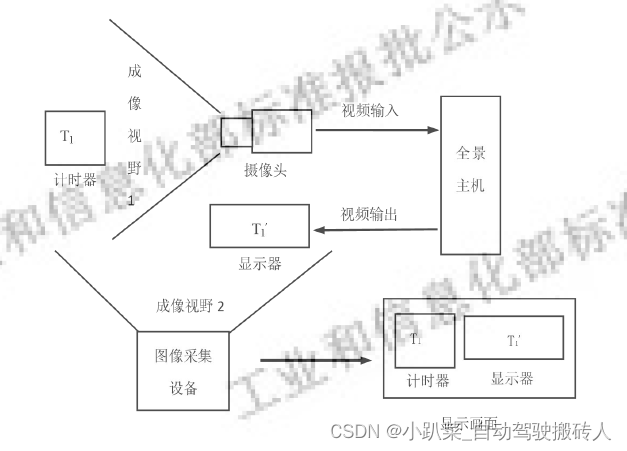
图像时延试验
试验布置见下图,试验步骤如下:
1. 开启系统,使其处于正常工作状态,显示屏正常成像;
2. 计时器置于系统视野范围内,并确保显示屏的成像画面中能清晰识别出计时器中的数字;
3. 将图像采集设备的成像视野对准计时器和显示屏,确保图像采集设备显示画面能清晰的识别出计时器和显示屏的数字;
4. 开启计时器计时,识别某一时刻计时器时间T1 和显示屏时间T1’,单次试验中图像时延为T1与T1’的差值。
5. 重复上述试验三次,该单视图下的图像时延T 取三次试验的平均值。
6. 分别在不同的单视图下重复上述试验。
单视图视野范围试验
开启系统,调整方向盘转角至0 °。将单视图切换至前单视图画面,分别在《性能要求》章节所定义相应位置放置圆柱体标志物,观察前单视图画面中该标志物是否完全显示。
将单视图切换至后单视图、左单视图和右单视图,分别在《性能要求》章节所定义相应位置放置圆柱体标志物,观察后单视图、左单视图和右单视图该标志物是否完全显示。
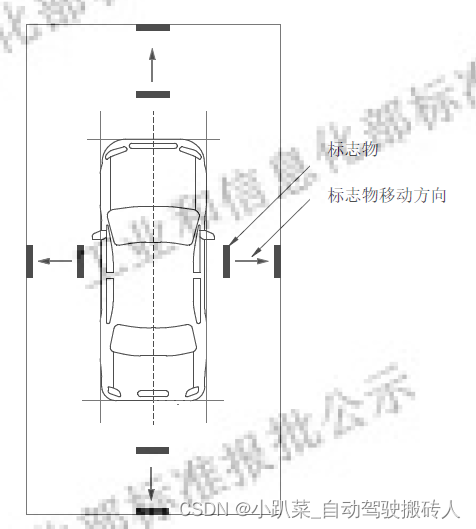
平面拼接视图视野试验
开启系统,调整方向盘转角至0 °,在被测车辆中轴线正前方外缘,垂直于试验车辆纵轴,水平放置平面标志物,如下图所示。在车辆前进方向移动标志物,直至标志物在平面拼接视图中完全显示,测量出此时标志物到车身前端外缘的最短距离。继续移动标志物,直至标志物在平面拼接视图中完全消失,测量出此时标志物到车身前端外缘的最短距离。
分别在车辆左侧中心外缘、右侧中心外缘平行于试验车辆纵轴水平放置标志物,后方中心外缘垂直于试验车辆纵轴水平放置标志物,按照如下图所示方向移动标志物,测量出标志物完全显示点和完全消失点距离车身对应侧外缘的最短距离。
平面拼接效果试验
试验准备
在被测车辆的四周放置棋盘格图卡,如下图所示。黑白单元格间隔布置,棋盘格应至少覆盖被测车辆前方及后方外2000 mm、左右外边缘外1500 mm区域,对于仅支持270 °范围视图拼接的N2、N3类车辆,后方无影像信息的区域可不铺设棋盘格。尽可能保证测试车辆居中摆放,误差在100 mm范围内,且单边间隙小于300 mm。棋盘格图卡的单元格边界线应与车辆轴线平行或垂直,误差不应大于5 °。
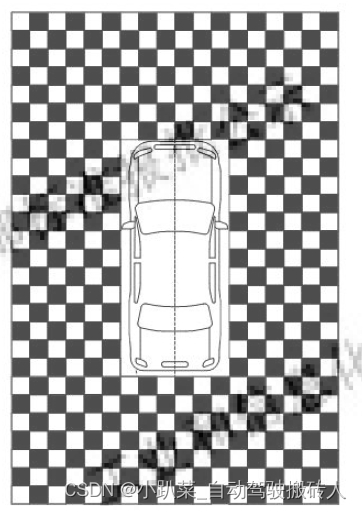
视图采集
开启系统,调整方向盘转角至0 °,采集系统显示端的平面拼接视图图像。图像采集设备的拍摄方向应平行于显示端法线,采集的平面拼接视图图像应无过曝、过暗、不清晰等明显缺陷。在采集的平面拼接视图中,分析系统在车身外边缘外前后2000 mm、左右外边缘外1500 mm范围内的视图拼接效果。
行列畸变评价
在采集的平面拼接视图中,分别测量车身前方外缘、后侧外缘第三行,左侧外缘、右侧外缘外第三列棋盘格中的l1和l2。
拼接错位和拼接无效区域评价
拼接错位计算
识别视图分析范围内存在的拼接错位,通过公式(1)计算单个拼接错位对应的实际长
度。

式中:
Ldi —— 拼接视图中某单个拼接错位的实际长度,单位为米(m);
lf —— 棋盘格图卡单元格的边长,单位为米(m);
Δxi —— 拼接视图中某单个拼接错位x方向的错位量,单位为毫米(mm);
Δyi —— 拼接视图中某单个拼接错位y方向的错位量,单位为毫米(mm);
l1 —— 棋盘格图卡单元格在图像上的边长,单位为毫米(mm)。
拼接无效区域及占比计算
识别视图在分析范围内存在拼接无效区域,分别计算任意田字格排布的单元格拼接的无效区域的实际面积和总拼接无效区域占比。单元格无效区域的边界按照以下步骤选择:
1. 针对采集到的图片中某一个单元格,预先选择出其有效区域的边界,取边界包拢区域内灰度均值,黑色单元格灰度均值记为Lbi、白色单元格灰度均值记为Lwi;预选的区域的边界应连续,与原棋盘格颜色相近。本步骤预选的有效区域可由测试机构和生产厂商共同确定;
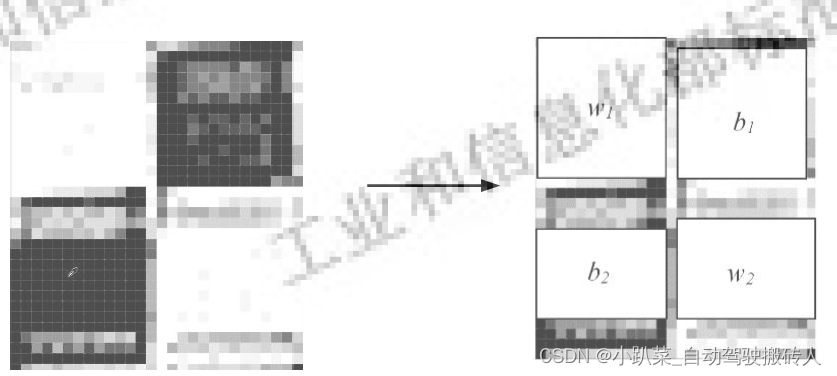
2. 黑色单元格位置中灰度小于Lbi 的像素点,其灰度置为0;白色单元格位置中灰度大于Lwi 的像素点,其灰度置为255,如图所示;

3. 图像(数据)二值化处理后,选取合理的规则矩形作为单元格的有效区域。最终得到的黑色单元格有效区域内(下图中区域b1、b2),灰度为0 的像素点所占比例应不小于50%,其边界上灰度为0 的像素占所在行或列的比例宜大于70%。最终得到的白色单元格有效区域内(下图中区域w1、w2),灰度为255 的像素点所占比例应不小于50%,其边界上灰度为255 的像素占所在行或列的比例宜大于70%;
4. 每个单元格(理论面积)中除去有效区域外的其他面积得到该单元格的拼接无效区域。拼接无效区域占比通过公式(2)计算:

式中:
Nv —— 拼接视图中拼接无效区域占比;
Svi —— 拼接视图中单元格的拼接无效区域面积,单位为平方毫米(mm²);
S —— 拼接视图中减去车辆模型及周边无影像区域的拼接区域面积,单位为平方毫米(mm²)。对于无后单视图的N2类、N3类车辆,还应减去无影像信息的部分。
相关文章:
泊车功能专题介绍 ———— 汽车全景影像监测系统性能要求及试验方法(国标未公布)
文章目录 术语和定义一般要求功能要求故障指示 性能要求响应时间图像时延单视图视野范围平面拼接视图视野平面拼接效果总体要求行列畸变拼接错位及拼接无效区域 试验方法环境条件仪器和设备车辆条件系统响应时间试验图像时延试验单视图视野范围试验平面拼接视图视野试验平面拼接…...
【Linux】第二十六站:软硬链接
文章目录 一、软链接二、硬链接三、ln命令四、该如何理解硬链接?五、如何理解软链接六、为什么要用软硬链接1.软链接的应用场景2.硬链接的应用场景 一、软链接 如下所示,我们创建一个文件以后,然后执行下面的指令 ln -s file.txt soft-link…...

开源播放器GSYVideoPlayer + ViewPager2 源码解析
开源播放器GSYVideoPlayer ViewPager2 源码解析 前言一、GSYVideoPlayer🔥🔥🔥是什么?二、源码解析1.ViewPager2Activity 总结 前言 本文介绍GSYVideoPlayer源码中关于ViewPager2 GSYVideoPlayer 实现的滑动播放列表的实现原理。…...

重启路由器可以解决N多问题?
为什么重启始终是路由器问题的首要解决方案? 在日常的工作学习工作中,不起眼的路由器是一种相对简单的设备,但这仍然是我们谈论的计算机。 这种廉价的塑料外壳装有 CPU、随机存取存储器 (RAM)、只读存储器 (ROM) 和许多其他组件。 该硬件运行预装的软件(或固件)来管理连接…...

Python WebSocket 客户端教程
WebSocket 是一种在客户端和服务器之间实现双向通信的协议,常用于实时聊天、实时数据更新等场景。Python 提供了许多库来实现 WebSocket 客户端,本教程将介绍如何使用 Python 构建 WebSocket 客户端。 什么是 WebSocket WebSocket 是一种基于 TCP 协议…...

洛谷 P2984 [USACO10FEB] Chocolate Giving S
文章目录 [USACO10FEB] Chocolate Giving S题面翻译题目描述输入格式输出格式 题目描述输入格式输出格式样例 #1样例输入 #1样例输出 #1 题意解析CODE给点思考 [USACO10FEB] Chocolate Giving S 题面翻译 题目链接:https://www.luogu.com.cn/problem/P2984 题目描…...
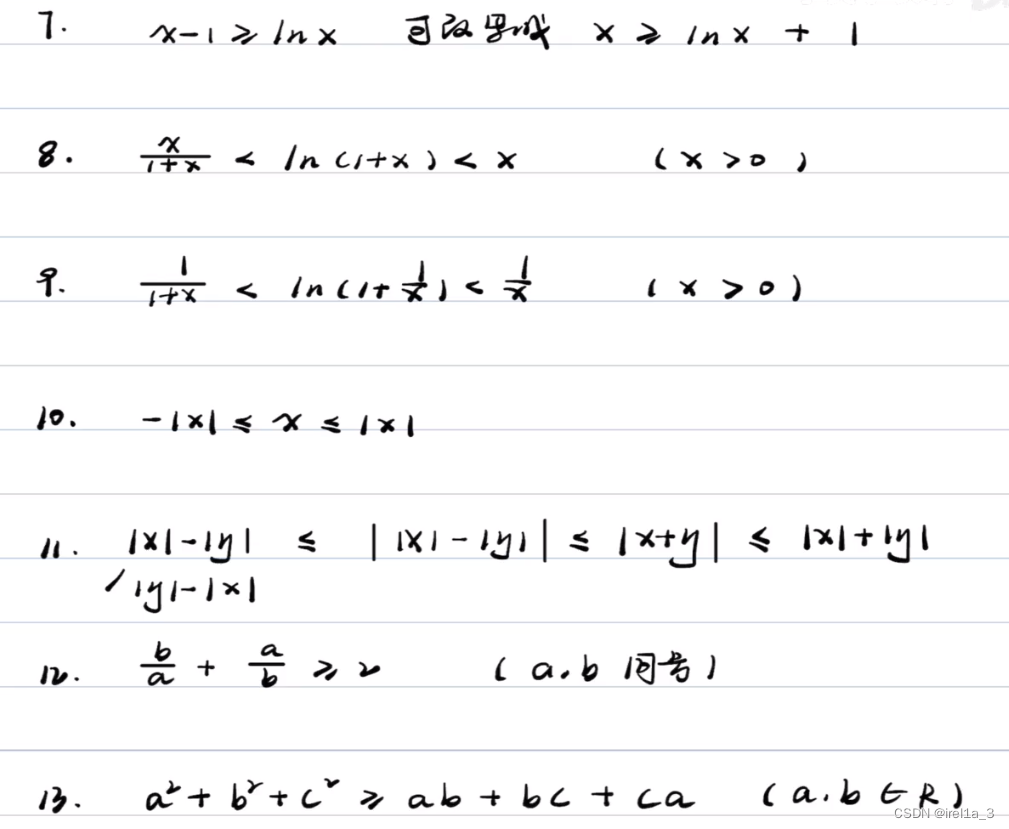
【专题】【数列极限】
【整体思路】 【常用不等式】...

oracle基础系统学习文章目录
oracle基础系统学习——点击标题可跳转对应文章 01.CentOS7静默安装oracle11g 02.Oracle的启动过程 03.从简单的sql开始 04.Oracle的体系架构 05.Oracle数据库对象 06.Oracle数据备份与恢复 07.用户和权限管理 08.Oracle的表 09.Oracle表的分区 10.Oracle的同义词与序列 11.Or…...
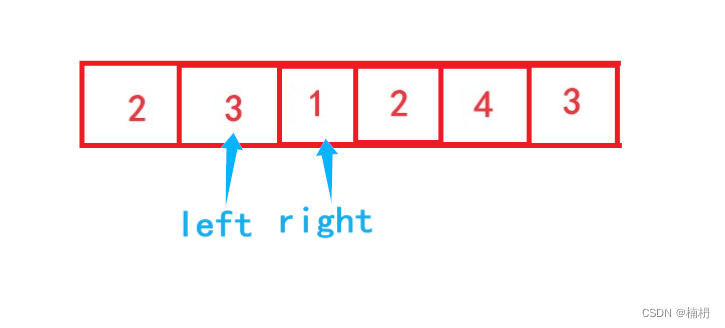
长度最小的子数组(Java详解)
目录 题目描述 题解 思路分析 暴力枚举代码 滑动窗口代码 题目描述 给定一个含有 n 个正整数的数组和一个正整数 target 。 找出该数组中满足其和 ≥ target 的长度最小的 连续子数组 [numsl, numsl1, ..., numsr-1, numsr] ,并返回其长度。如果不存在符合条…...

计算机组成学习-数据的表示和运算总结
复习本章时,思考以下问题: 1)在计算机中,为什么要采用二进制来表示数据?2)计算机在字长足够的情况下能够精确地表示每个数吗?若不能,请举例说明。3)字长相同的情况下,浮点数和定点数的表示范围…...
(八))
目标检测YOLO系列从入门到精通技术详解100篇-【目标检测】机器视觉(基础篇)(八)
目录 前言 知识储备 机器视觉学习路线 视觉算法流程...

【4】基于多设计模式下的同步异步日志系统-框架设计
7. 日志系统框架设计 本项⽬实现的是⼀个多日志器日志系统,主要实现的功能是让程序员能够轻松的将程序运行日志信息落地到指定的位置,且⽀持同步与异步两种方式的日志落地方式。 项目的框架设计将项目分为以下几个模块来实现。 日志等级模块 日志等级模…...
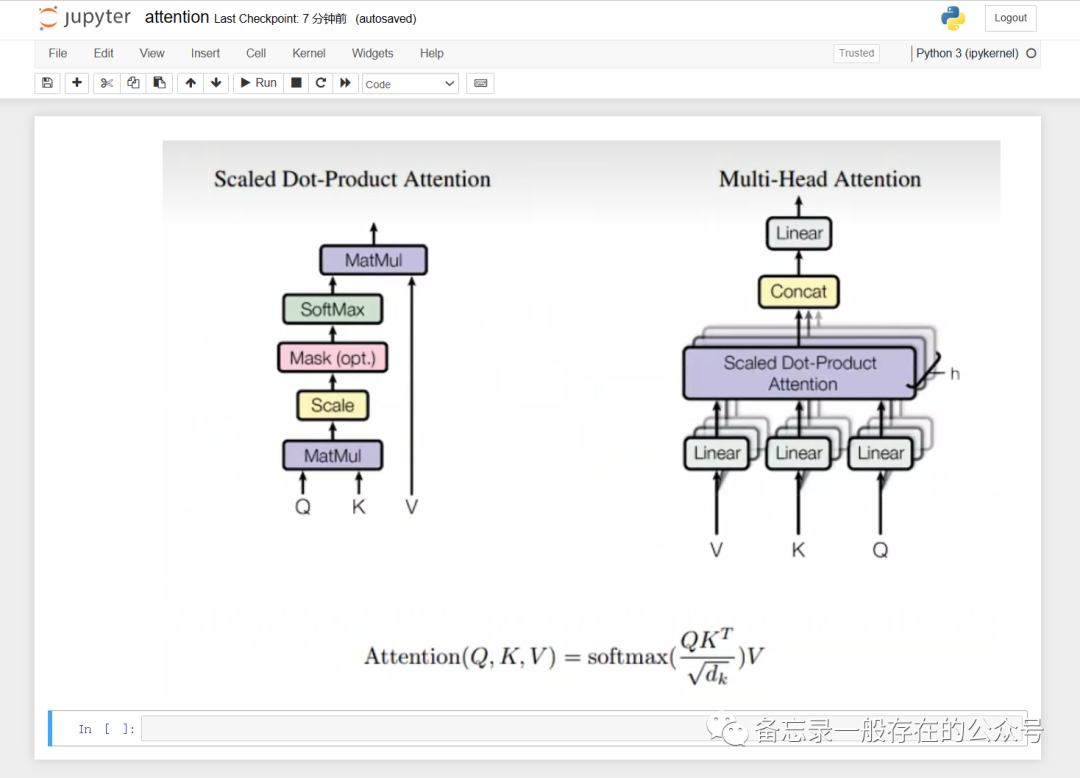
Jupyter Markdown 插入图片
首先截图 注意 这一步是关键的!! 它需要使用电脑自带的截图,用qq啊vx啊美图秀秀那些都不行哦。 截图之后复制: 然后快捷键粘贴到jupyter里面,它会生成一段代码(没有代码就是说截图形式不对)&a…...
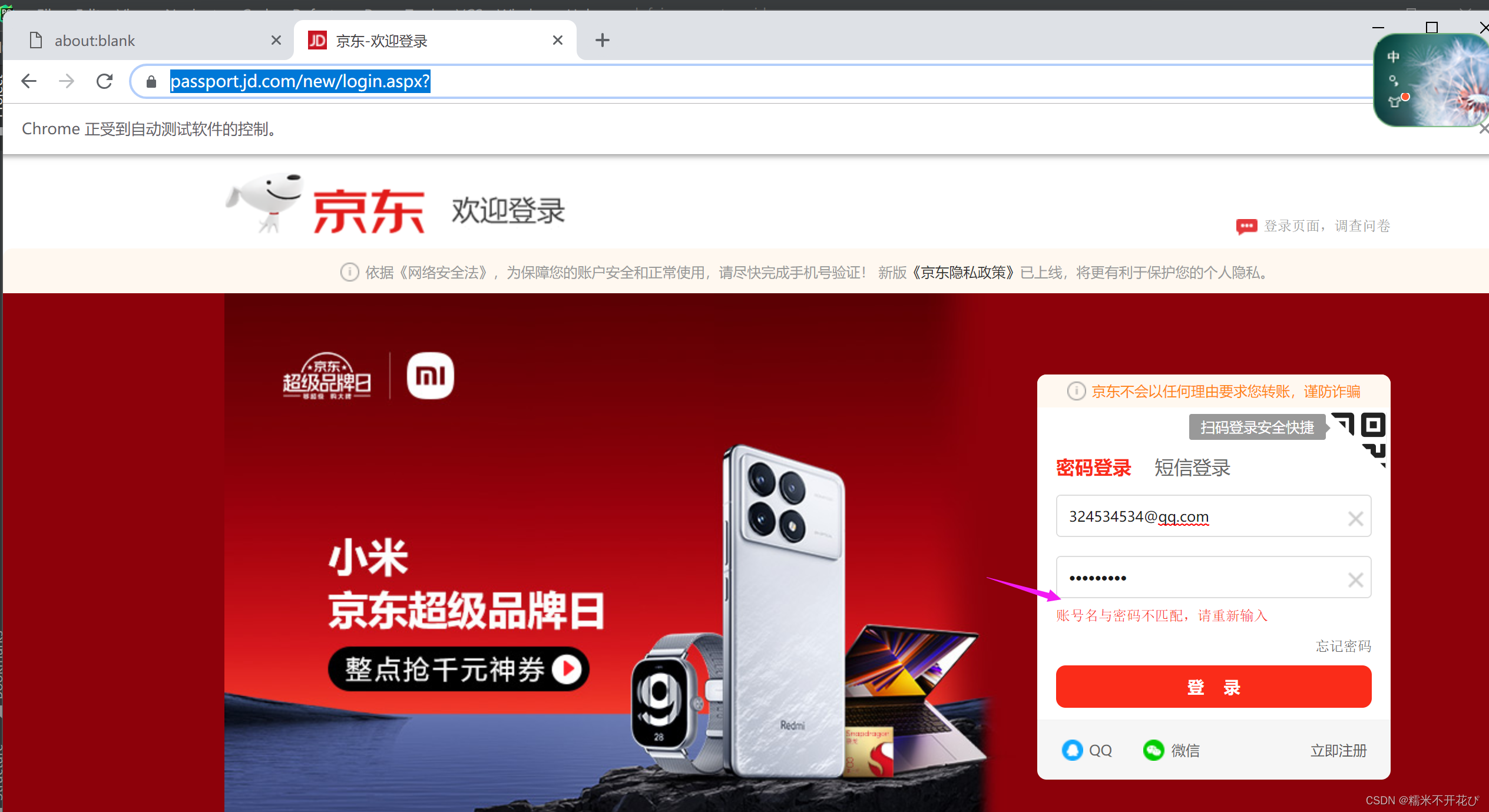
web自动化 -- pyppeteer
由于Selenium流行已久,现在稍微有点反爬的网站都会对selenium和webdriver进行识别,网站只需要在前端js添加一下判断脚本,很容易就可以判断出是真人访问还是webdriver。虽然也可以通过中间代理的方式进行js注入屏蔽webdriver检测,但…...

Java 数组另类用法(字符来当数组下标使用)
一、原因 看力扣的时候发现有位大佬使用字符来当数组下标使用。 class Solution {public int lengthOfLongestSubstring(String s) {int result 0;int[] hash new int[130];int i 0;for(int j 0; j < s.length(); j) {while(hash[s.charAt(j)] > 0) {hash[s.charAt…...

error转string
1 概述 在golang中,error类型是非常常见的一种数据类型。在开发过程中,经常会遇到需要将error类型转换成string类型的情况。本文主要介绍几种常见的golang error转string的方法。 2 使用Error()函数 在golang中,Error()函数是error类型的一…...

Android监听用户的截屏、投屏、录屏行为
Android监听用户的截屏、投屏、录屏行为 一.截屏 方案一:使用系统广播监听截屏操作 从Android Q(10.0)开始,Intent.ACTION_SCREEN_CAPTURED_CHANGED字段不再被支持。这是因为Google在安卓10 中引入了一个新的隐私限制&#…...

MATLAB算法实战应用案例精讲-【路径规划】 图搜索算法
目录 前言 几个高频面试题目 运动规划、路径规划、轨迹规划对比 1. 运动规划 2. 路径规划VS轨迹规划...

Elasticsearch-Kibana使用教程
1.索引操作 1.1创建索引 PUT /employee {"settings": {"index": {"refresh_interval": "1s","number_of_shards": 1,"max_result_window": "10000","number_of_replicas": 0}},"mappi…...
mysql(八)docker版Mysql8.x设置大小写忽略
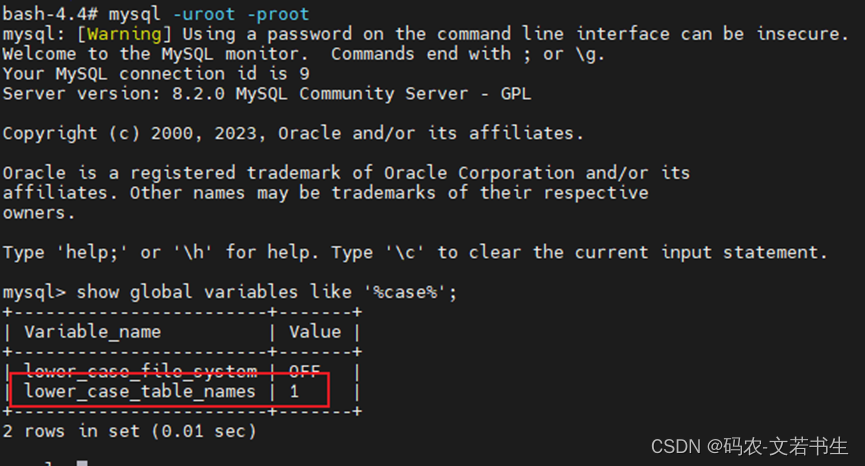
Mysql 5.7设置大小写忽略可以登录到Docker内部,修改/etc/my.cnf添加lower_case_table_names1,并重启docker使之忽略大小写。但MySQL8.0后不允许这样,官方文档记录: lower_case_table_names can only be configured when initializ…...

别再“另存为”了!职场人90%的无效内耗都源于这一个操作。企业文档如何管理?
加班到晚上八点,职场人小林终于改完了项目方案,随手点了“另存为”,命名为“方案_最终版.doc“后发到了工作群。本以为可以安心下班,群里却炸锅了:“小林,你这个最终版和我手里的不一样啊?”“我…...

DeepSeek RAG pipeline重构实录,KISS检查挽救了87%的推理延迟——从2300ms到290ms的极简跃迁
更多请点击: https://intelliparadigm.com 第一章:DeepSeek RAG pipeline重构实录,KISS检查挽救了87%的推理延迟——从2300ms到290ms的极简跃迁 在一次线上 P99 延迟告警中,DeepSeek 的 RAG 服务平均响应时间飙升至 2300ms&#…...

别再只刷Demo了!手把手教你用CCS给AWR1843毫米波雷达写自己的‘大脑’
从Demo玩家到雷达开发者:AWR1843毫米波雷达CCS深度开发实战 毫米波雷达技术正在智能驾驶、工业检测等领域掀起革命浪潮。作为TI明星产品,AWR1843凭借其高性价比和丰富功能成为众多开发者的首选。但大多数用户止步于运行官方Demo,未能真正释放…...

收藏!小白程序员必看:大模型AI入门学习指南,带你玩转制造业全流程
收藏!小白程序员必看:大模型AI入门学习指南,带你玩转制造业全流程 本文深入探讨了AI技术在制造业全流程中的应用及其重要意义。文章从研发设计、生产制造、运营管理和产品服务等环节入手,详细阐述了AI技术如何通过优化流程、提高效…...

如何5分钟快速提升GitHub访问速度:FastGithub完整配置指南
如何5分钟快速提升GitHub访问速度:FastGithub完整配置指南 【免费下载链接】FastGithub github定制版的dns服务,解析访问github最快的ip 项目地址: https://gitcode.com/gh_mirrors/fa/FastGithub GitHub作为全球开发者最常用的代码托管平台&…...
)
DeepSeek GAOKAO测试结果深度复盘(附17套真题响应日志与错误归因图谱)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek GAOKAO测试结果深度复盘(附17套真题响应日志与错误归因图谱) 在2024年高考真题压力测试中,DeepSeek-V2模型在覆盖全国卷Ⅰ、Ⅱ、Ⅲ及北京、上海、浙江等17套…...
)
别再傻傻用CALL了!PowerShell里调用批处理脚本的3种正确姿势(含管理员权限避坑)
从CALL报错到跨Shell协作:PowerShell与批处理脚本的深度整合指南 当你在PowerShell中键入熟悉的CALL命令时,那个刺眼的红色错误信息可能让你瞬间愣住。这不是你的错——而是两种不同Shell环境的思维碰撞。本文将带你超越简单的"报错解决"&…...

从零上手Ranorex:录制、验证与参数化测试实战解析
1. Ranorex自动化测试入门指南 第一次接触Ranorex时,我和大多数测试工程师一样,被它强大的功能所震撼。作为一款专业的自动化测试工具,Ranorex能够显著提升测试效率,特别适合需要频繁回归测试的项目场景。记得我第一次用它完成计算…...

别再傻傻分不清!RV、RVV、RVVP这些电工字母到底啥意思?一张图帮你搞定家庭布线选线
家庭电工实战指南:RV/RVV/RVVP线材选型与避坑手册 刚打开装修材料清单时,那些密密麻麻的字母组合让人瞬间头大——RV、RVV、RVVP、AVVR...这些看似天书的代号,直接决定了你家插座能否承载大功率电器、智能窗帘会不会信号中断,甚至…...

MVT矢量瓦片实战避坑指南:从配置到渲染的进阶解析
1. MVT矢量瓦片基础概念与核心优势 第一次接触MVT(Mapbox Vector Tile)矢量瓦片时,我和大多数开发者一样困惑:为什么不用传统的栅格瓦片?直到在某次地图项目中遇到动态样式调整需求时才恍然大悟。MVT本质上是将地理数据…...