ROS第一个程序——helloworld
目录
一、工作空间的创建
1.创建工作空间并初始化
2.进入 src 创建 ros 包并添加依赖
二、C++实现helloworld
C++源码实现
编辑 ros 包下的 Cmakelist.txt文件
进入工作空间目录并编译
执行
三、python实现helloworld
进入 ros 包添加 scripts 目录并编辑 python 文件
新建 python 文件
为 python 文件添加可执行权限
编辑 ros 包下的 CamkeList.txt 文件
进入工作空间目录并编译
执行
一、工作空间的创建
1.创建工作空间并初始化
mkdir -p 自定义空间名称/src
cd 自定义空间名称
catkin_make
首先会创建一个工作空间以及一个 src 子目录,然后再进入工作空间调用 catkin_make命令编译。
2.进入 src 创建 ros 包并添加依赖
cd src
catkin_create_pkg 自定义ROS包名 roscpp rospy std_msgs
上述命令,会在工作空间下生成一个功能包,该功能包依赖于 roscpp、rospy 与 std_msgs,其中roscpp是使用C++实现的库,而rospy则是使用python实现的库,std_msgs是标准消息库,创建ROS功能包时,一般都会依赖这三个库实现。

二、C++实现helloworld
cd 自定义的包
C++源码实现
#include "ros/ros.h"int main(int argc, char *argv[])
{//执行 ros 节点初始化ros::init(argc,argv,"hello");//创建 ros 节点句柄(非必须)ros::NodeHandle n;//控制台输出 hello worldROS_INFO("hello world!");return 0;
}
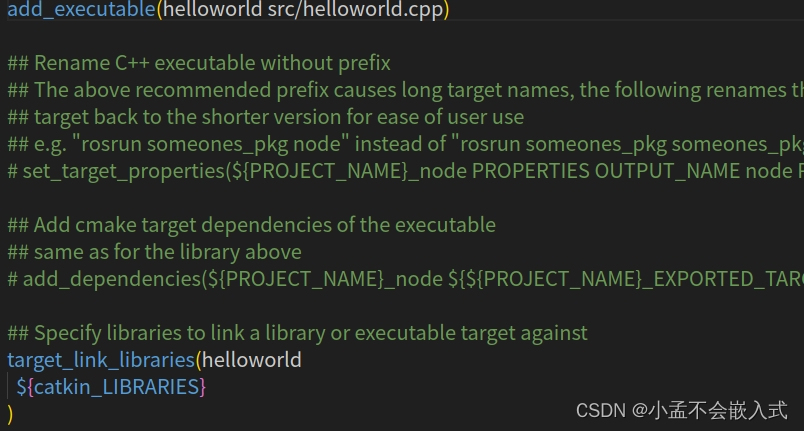
编辑 ros 包下的 Cmakelist.txt文件
add_executable(步骤3的源文件名src/步骤3的源文件名.cpp
)
target_link_libraries(步骤3的源文件名${catkin_LIBRARIES}
)
进入工作空间目录并编译
cd 自定义空间名称
catkin_make
执行
先启动命令行1:
roscore
再启动命令行2:
cd 工作空间
source ./devel/setup.bash
rosrun 包名 C++节点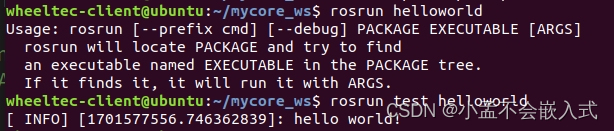
三、python实现helloworld
进入 ros 包添加 scripts 目录并编辑 python 文件
cd ros包
mkdir scripts
新建 python 文件
#! /usr/bin/env pythonimport rospyif __name__ == "__main__":rospy.init_node("Hello")rospy.loginfo("Hello World!!!!")为 python 文件添加可执行权限
chmod +x 自定义文件名.py
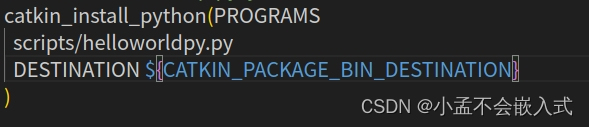
编辑 ros 包下的 CamkeList.txt 文件
catkin_install_python(PROGRAMS scripts/自定义文件名.pyDESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
进入工作空间目录并编译
先启动命令行1:
roscore
再启动命令行2:
cd 工作空间
source ./devel/setup.bash
rosrun 包名 自定义文件名.py执行

相关文章:
ROS第一个程序——helloworld
目录 一、工作空间的创建 1.创建工作空间并初始化 2.进入 src 创建 ros 包并添加依赖 二、C实现helloworld C源码实现 编辑 ros 包下的 Cmakelist.txt文件 进入工作空间目录并编译 执行 三、python实现helloworld 进入 ros 包添加 scripts 目录并编辑 python 文件 …...

【Python 训练营】N_17 冒泡排序
题目 列表L [3,2,5,6,1,3,8,1,9],冒泡排序实现从小到大排列。 分析 冒泡排序的基本思想是从序列的第一个元素开始,依次比较相邻的两个元素,如果它们的顺序错误就交换它们的位置,直到整个序列有序为止。具体步骤如下࿱…...

虚拟机docker中的Nginx部署
Nginx部署 : 1.搜索nginx镜像 docker search nginx 2.拉取nginx镜像 docker pull nginx 3.创建目录 mkdir nginx cd nginx mkdir conf cd conf vim nginx.conf 4.编写nginx.conf配置文件 user nginx; worker_processes 1; error_log /var/log/nginx/erro…...

06、pytest将多个测试放在一个类中
官方用例 # content of test_class.py # 实例1 class TestClass:def test_one(self):x "this"assert "h" in xdef test_two(self):x "hello"assert hasattr(x,"check")# content of test_class_demo.py # 每个测试都有唯一的类实例…...

实体类转SQL工具类
主要的目标是简化开发人员在有实体类的情况下时做的重复性工作,提高开发效率。 单个实体类的转换工具类 1.EntityToTableConverter工具类 import java.io.FileWriter; import java.io.IOException; import java.lang.reflect.Field; import java.math.BigDecimal…...

高端制造业中的通用性超精密3D光学测量仪器
超精密光学3D测量仪器具有高精度、自动化程度高、实时反馈和范围广等优势。它能够实现微米级别的精确测量,能够精确测量产品的尺寸、形状和表面粗糙度等,具有广泛的应用价值和重要意义。 超精密光学3D测量仪器配备多种传感器、控制器和计算机系统&#…...

微信公众号非静默授权获取头像和昵称
要在Vue前端应用程序中实现微信公众号非静默授权获取头像和昵称,您需要遵循以下步骤: 1.在微信公众平台上注册并创建一个公众号。 2.在Vue项目中安装wechat-js-sdk库,该库提供了与微信JS-SDK的交互功能。 npm install wechat-js-sdk --sav…...

Java项目学生管理系统四编辑学生
编辑学生 欢迎阅读本篇博客,今天我们将继续探索Java项目学生管理系统的功能,重点关注学生信息的修改模块。在学生管理系统中,修改学生信息是一个关键操作,通过该功能可以方便地更新学生的个人信息、成绩以及其他相关数据。通过本…...
)
不同数据库进行同步和增量数据(SQL server 与MySQL数据库为例)
场景 最近在做的一个项目需要将远程服务器的SQL server数据库中表的数据传输到本机的MySQL数据库中,并且远程的SQL server数据库表的数据会实时进行更新,并且差不多是一分钟内传输18条数据,例如现在是2023-12-4 15:09,在15:08这个…...
国内的几款强大的AI智能—AI语言模型
R5Ai智能助手是一款由百度研发的文心一言,它支持gpt4 / gpt-3.5 / claude,也支持AI绘画,每天提供十次免费使用机会,无需魔法。该智能助手具有以下优点:会画画,没有使用次数限制,可以在界面上找到…...

linux下恶意软件的七种反分析技术
7 类主流的 Linux 恶意软件反分析/检测躲避技术 反调试(Anti-Debug): 软件调试是恶意软件分析的常⽤⼿段之⼀,但恶意软件可以通过识别调试器特征,实现⾃⾝恶意⾏为的隐藏,或导致调试失败,从⽽规避分析与检测…...

Spring Security OAuth2 认证服务器自定义异常处理
目录 前言WebResponseExceptionTranslator自定义异常处理1、自定义我们响应实体类2、定义响应结果枚举类3、自定义异常转换类4、配置自定义异常转换器5、测试 前言 Spring Security OAuth2 认证失败的格式如下 {"error": "unsupported_grant_type","…...

selenium环境安装
一、下载安装python 下载python安装python设置python环境变量安装selenium (1)下载python 您可以从Python官方网站(https://www.python.org/downloads/)下载Python。在页面上,您将看到不同版本的Python供您选择。根…...
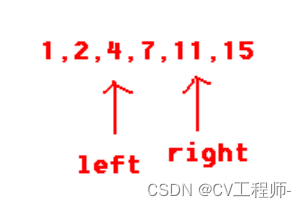
(C++)和为s的两个数字--双指针算法
个人主页:Lei宝啊 愿所有美好如期而遇 和为S的两个数字_牛客题霸_牛客网输入一个升序数组 array 和一个数字S,在数组中查找两个数,使得他们的和正好是S,如果。题目来自【牛客题霸】https://www.nowcoder.com/practice/390da4f7a…...
应用开发——构建页面(题目答案))
鸿蒙(HarmonyOS)应用开发——构建页面(题目答案)
判断题 1.在Column容器中的子组件默认是按照从上到下的垂直方向布局的,其主轴的方向是垂直方向,在Row容器中的组件默认是按照从左到右的水平方向布局的,其主轴的方向是水平方向。 正确(True) 2.List容器可以沿水平方向排列,也可…...

Python基础快速过一遍
文章目录 一、变量及基本概念1、变量2、变量类型3、变量格式化输出4、type()函数5、input()函数6、类型转换函数7、注释 二、Python运算/字符1、算数运算2、比较运算3、逻辑运算4、赋值运算符5、转义字符6、成员运算符 三、判断/循环语句1、if判断语句2、while循环语句3、for循…...

等保测评报价相差很大,里面有什么门道
等保测评报价的差异主要源于以下几点: 服务质量评估标准不同:不同的测评机构在测评过程中所提供的服务范围、深度、细节等方面可能存在差异,因此导致报价有所不同。一些机构可能提供全面且细致的测评服务,致力于提供高质量的等保测…...
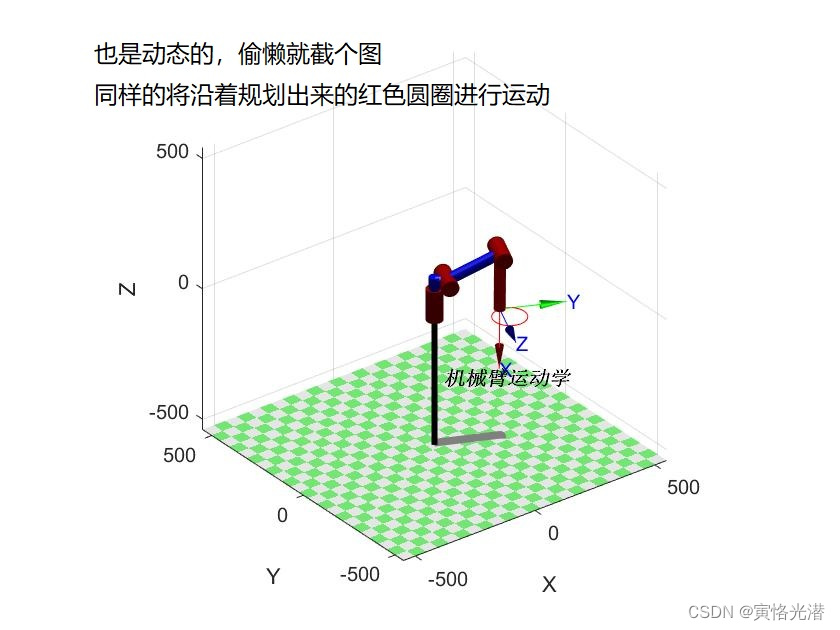
MATLAB的rvctools工具箱熟悉运动学【机械臂机器人示例】
1、rvctools下载安装 rvctools下载地址:rvctools下载 截图如下,点击红色箭头指示的“Download Shared Folder” 即可下载 下载之后进行解压,解压到D:\MATLAB\toolbox这个工具箱目录,这个安装路径根据自己的情况来选择,…...

如何精准操作无人机自动停机坪?
无人机自动停机坪通过自主导航和避障功能,实现了无人机的自主降落和起飞,在无人机技术领域起到了至关重要的作用。停机坪不仅仅是无人机的起降平台,还具备自动换电或充电等功能,为无人机的自动化提供了关键支持。为更有效地操作无…...
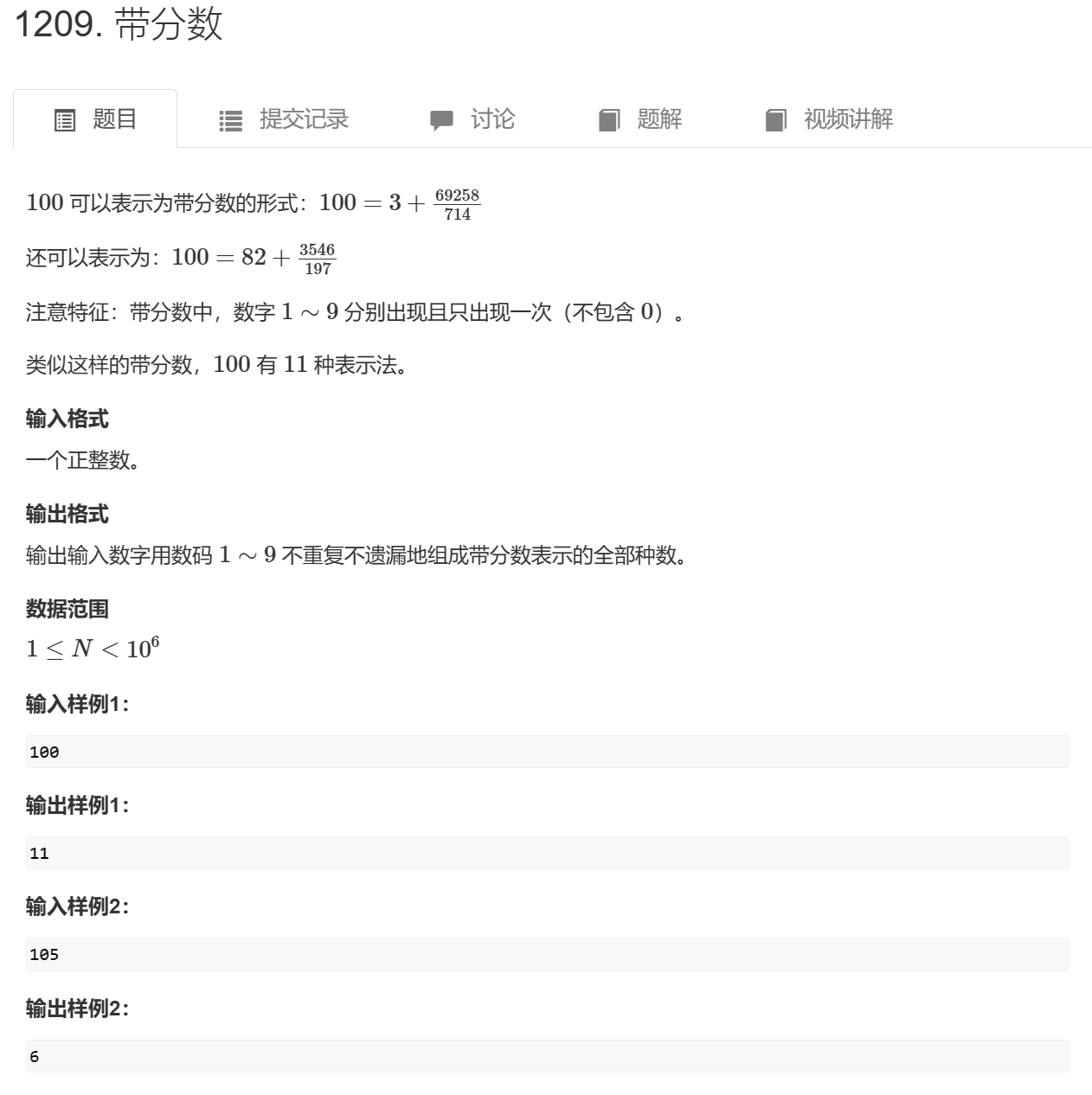
【蓝桥杯】带分数
带分数 题目要求用一个ab/c的形式得到一个值,而且只能在1~9里面不重复的组合。 可以对1~9进行全排列,然后不断划分区间。 #include<iostream> #include<vector> using namespace std; int st[15]; int num[15]; int res; int n;int calc(i…...

FCEUX终极指南:从怀旧游戏到专业调试的完整NES模拟器教程
FCEUX终极指南:从怀旧游戏到专业调试的完整NES模拟器教程 【免费下载链接】fceux FCEUX, a NES Emulator 项目地址: https://gitcode.com/gh_mirrors/fc/fceux FCEUX是一款功能强大的开源NES模拟器,让你在现代电脑上完美重温经典红白机游戏。无论…...

适合地产人用的中介房源管理系统
在房产经纪行业,房源管理与客源管理是经纪人日常工作的核心,直接影响业务效率与成交转化。选择一套适配行业需求的中介房源管理系统,能帮助中介团队规范流程、降低运营成本、大幅提升业绩。今天我们以客观视角,详细解析全房源系统…...

内网环境下Win7系统批量离线补丁部署实战指南
1. 内网Win7补丁部署的挑战与解决方案老旧Win7系统在内网环境中的安全隐患就像漏雨的屋顶,看似不影响日常使用,但随时可能引发严重后果。我经手过几十家单位的系统加固项目,发现这些场景存在三个典型痛点:首先是补丁来源问题&…...

光效崩坏?噪点泛滥?色温漂移?——Midjourney专业级光效渲染全流程校准协议,含ACEScg色彩空间适配模板
更多请点击: https://kaifayun.com 第一章:光效崩坏、噪点泛滥与色温漂移的系统性归因诊断 图像采集链路中出现的光效崩坏、噪点泛滥与色温漂移并非孤立现象,而是光学设计、传感器响应、ISP管线调度及环境耦合失配共同作用的结果。三者常呈现…...

WarcraftHelper终极指南:魔兽争霸3兼容性问题一站式解决方案
WarcraftHelper终极指南:魔兽争霸3兼容性问题一站式解决方案 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为《魔兽争霸3》在现代电…...

武汉国电华美串联谐振试验装置,现场用着心里有底
在高压试验现场干了这么多年,这位老师傅常说,一台好的串联谐振装置,就是试验人员的胆。面对GIS、大型变压器、超高压电缆这些大电容试品,没有趁手的谐振设备,交流耐压试验根本没法干。16875kVA/225kV这个规格ÿ…...

Gazebo Sim多旋翼控制:四轴飞行器动力学建模与PID调参
Gazebo Sim多旋翼控制:四轴飞行器动力学建模与PID调参 【免费下载链接】gz-sim Open source robotics simulator. The latest version of Gazebo. 项目地址: https://gitcode.com/gh_mirrors/gz/gz-sim Gazebo Sim是一款功能强大的开源机器人模拟器ÿ…...

BiliRoamingX:彻底解决B站体验限制的完整增强方案
BiliRoamingX:彻底解决B站体验限制的完整增强方案 【免费下载链接】BiliRoamingX-integrations BiliRoamingX integrations and patches powered by ReVanced. 项目地址: https://gitcode.com/gh_mirrors/bi/BiliRoamingX-integrations 你是否曾为B站的内容区…...

别再死记硬背了!用UE材质里的点积、叉积,5分钟搞定模型表面动态光效
用UE材质玩转动态光效:点积、叉积实战指南第一次接触UE材质编辑器时,看到那些密密麻麻的数学节点总让人头皮发麻。特别是"点积"、"叉积"这些听起来就很高深的术语,很容易让美术背景的创作者望而却步。但你知道吗…...

从零构建FOC轮腿机器人:开源平衡机器人完整指南
从零构建FOC轮腿机器人:开源平衡机器人完整指南 【免费下载链接】foc-wheel-legged-robot Open source materials for a novel structured legged robot, including mechanical design, electronic design, algorithm simulation, and software development. | 一个…...