BiseNet实现遥感影像地物分类
遥感地物分类通过对遥感图像中的地物进行准确识别和分类,为资源管理、环境保护、城市规划、灾害监测等领域提供重要信息,有助于实现精细化管理和科学决策,提升社会治理和经济发展水平。深度学习遥感地物分类在提高分类精度、自动化程度、处理大规模数据、普适性以及推动遥感技术创新和发展等方面都具有重要的意义。本文将利用深度学习BiseNet实现遥感地物分类。
数据集
本文使用的数据集为WHDLD数据集[1](Wuhan dense labeling dataset)。WHDLD数据集包括4940张高分辨率遥感影像,包含6种土地覆盖类型,影像尺寸均被裁剪至256×256像素。下面是一些数据集示例。 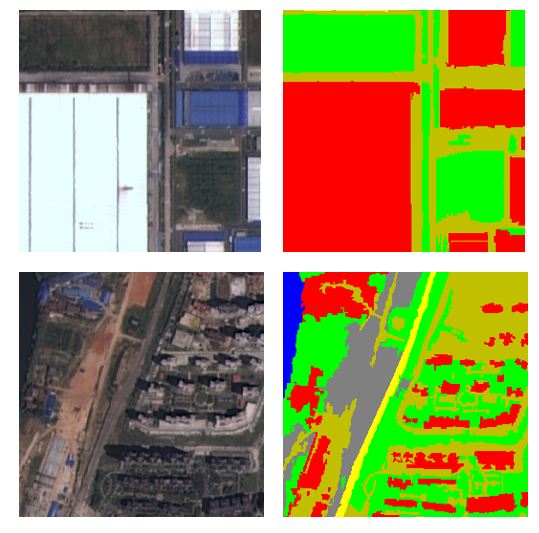
BiSeNet
BiseNet[2](Bilateral Segmentation Network)是一种用于图像分割的深度学习网络。它具有双边分割的特点,可以同时处理空间信息和上下文信息,从而实现高效、准确的图像分割。
具体来说,BiseNet由两个分支组成:空间路径(spatial path)和上下文路径(context path)。其中,空间路径具有较小的感受野,可以捕获丰富的空间信息并生成高分辨率的特征图;而上下文路径则具有较大的感受野,可以捕获更多的上下文信息并生成低分辨率的特征图。这两个路径通过一个特征融合模块进行融合,从而生成既包含丰富空间信息又包含上下文信息的分割结果。
在BiseNet中,还有一些关键的技术和设计,如轻量级模型设计、注意力机制、特征融合等,这些技术和设计可以进一步提升网络的性能和效率。 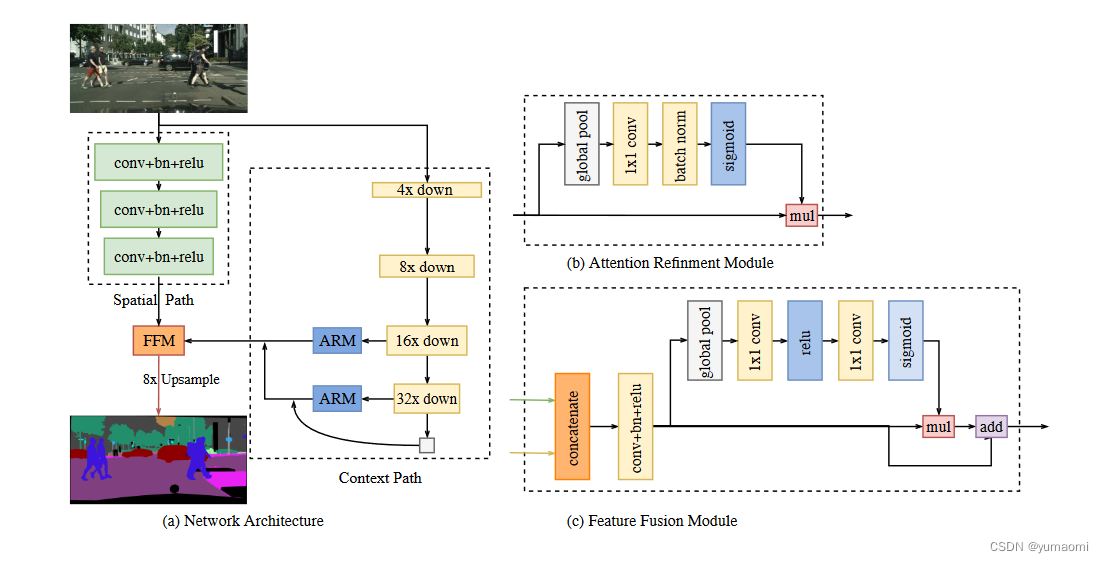
网络复现
resnet18
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.utils.model_zoo as modelzoo
resnet18_url = 'https://download.pytorch.org/models/resnet18-5c106cde.pth'
from torch.nn import BatchNorm2d
def conv3x3(in_planes, out_planes, stride=1):
"""3x3 convolution with padding"""
return nn.Conv2d(in_planes, out_planes, kernel_size=3, stride=stride,
padding=1, bias=False)
class BasicBlock(nn.Module):
def __init__(self, in_chan, out_chan, stride=1):
super(BasicBlock, self).__init__()
self.conv1 = conv3x3(in_chan, out_chan, stride)
self.bn1 = BatchNorm2d(out_chan)
self.conv2 = conv3x3(out_chan, out_chan)
self.bn2 = BatchNorm2d(out_chan)
self.relu = nn.ReLU(inplace=True)
self.downsample = None
if in_chan != out_chan or stride != 1:
self.downsample = nn.Sequential(
nn.Conv2d(in_chan, out_chan,
kernel_size=1, stride=stride, bias=False),
BatchNorm2d(out_chan),
)
def forward(self, x):
residual = self.conv1(x)
residual = self.bn1(residual)
residual = self.relu(residual)
residual = self.conv2(residual)
residual = self.bn2(residual)
shortcut = x
if self.downsample is not None:
shortcut = self.downsample(x)
out = shortcut + residual
out = self.relu(out)
return out
def create_layer_basic(in_chan, out_chan, bnum, stride=1):
layers = [BasicBlock(in_chan, out_chan, stride=stride)]
for i in range(bnum-1):
layers.append(BasicBlock(out_chan, out_chan, stride=1))
return nn.Sequential(*layers)
class Resnet18(nn.Module):
def __init__(self):
super(Resnet18, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3,
bias=False)
self.bn1 = BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = create_layer_basic(64, 64, bnum=2, stride=1)
self.layer2 = create_layer_basic(64, 128, bnum=2, stride=2)
self.layer3 = create_layer_basic(128, 256, bnum=2, stride=2)
self.layer4 = create_layer_basic(256, 512, bnum=2, stride=2)
self.init_weight()
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
feat8 = self.layer2(x) # 1/8
feat16 = self.layer3(feat8) # 1/16
feat32 = self.layer4(feat16) # 1/32
return feat8, feat16, feat32
def init_weight(self):
state_dict = modelzoo.load_url(resnet18_url)
self_state_dict = self.state_dict()
for k, v in state_dict.items():
if 'fc' in k: continue
self_state_dict.update({k: v})
self.load_state_dict(self_state_dict)
def get_params(self):
wd_params, nowd_params = [], []
for name, module in self.named_modules():
if isinstance(module, (nn.Linear, nn.Conv2d)):
wd_params.append(module.weight)
if not module.bias is None:
nowd_params.append(module.bias)
elif isinstance(module, nn.modules.batchnorm._BatchNorm):
nowd_params += list(module.parameters())
return wd_params, nowd_params
BiSeNet
import torch
import torch.nn as nn
import torch.nn.functional as F
import torchvision
from .resnet import Resnet18
from torch.nn import BatchNorm2d
class ConvBNReLU(nn.Module):
def __init__(self, in_chan, out_chan, ks=3, stride=1, padding=1, *args, **kwargs):
super(ConvBNReLU, self).__init__()
self.conv = nn.Conv2d(in_chan,
out_chan,
kernel_size = ks,
stride = stride,
padding = padding,
bias = False)
self.bn = BatchNorm2d(out_chan)
self.relu = nn.ReLU(inplace=True)
self.init_weight()
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
x = self.relu(x)
return x
def init_weight(self):
for ly in self.children():
if isinstance(ly, nn.Conv2d):
nn.init.kaiming_normal_(ly.weight, a=1)
if not ly.bias is None: nn.init.constant_(ly.bias, 0)
class UpSample(nn.Module):
def __init__(self, n_chan, factor=2):
super(UpSample, self).__init__()
out_chan = n_chan * factor * factor
self.proj = nn.Conv2d(n_chan, out_chan, 1, 1, 0)
self.up = nn.PixelShuffle(factor)
self.init_weight()
def forward(self, x):
feat = self.proj(x)
feat = self.up(feat)
return feat
def init_weight(self):
nn.init.xavier_normal_(self.proj.weight, gain=1.)
class BiSeNetOutput(nn.Module):
def __init__(self, in_chan, mid_chan, n_classes, up_factor=32, *args, **kwargs):
super(BiSeNetOutput, self).__init__()
self.up_factor = up_factor
out_chan = n_classes
self.conv = ConvBNReLU(in_chan, mid_chan, ks=3, stride=1, padding=1)
self.conv_out = nn.Conv2d(mid_chan, out_chan, kernel_size=1, bias=True)
self.up = nn.Upsample(scale_factor=up_factor,
mode='bilinear', align_corners=False)
self.init_weight()
def forward(self, x):
x = self.conv(x)
x = self.conv_out(x)
x = self.up(x)
return x
def init_weight(self):
for ly in self.children():
if isinstance(ly, nn.Conv2d):
nn.init.kaiming_normal_(ly.weight, a=1)
if not ly.bias is None: nn.init.constant_(ly.bias, 0)
def get_params(self):
wd_params, nowd_params = [], []
for name, module in self.named_modules():
if isinstance(module, (nn.Linear, nn.Conv2d)):
wd_params.append(module.weight)
if not module.bias is None:
nowd_params.append(module.bias)
elif isinstance(module, nn.modules.batchnorm._BatchNorm):
nowd_params += list(module.parameters())
return wd_params, nowd_params
class AttentionRefinementModule(nn.Module):
def __init__(self, in_chan, out_chan, *args, **kwargs):
super(AttentionRefinementModule, self).__init__()
self.conv = ConvBNReLU(in_chan, out_chan, ks=3, stride=1, padding=1)
self.conv_atten = nn.Conv2d(out_chan, out_chan, kernel_size= 1, bias=False)
self.bn_atten = BatchNorm2d(out_chan)
# self.sigmoid_atten = nn.Sigmoid()
self.init_weight()
def forward(self, x):
feat = self.conv(x)
atten = torch.mean(feat, dim=(2, 3), keepdim=True)
atten = self.conv_atten(atten)
atten = self.bn_atten(atten)
# atten = self.sigmoid_atten(atten)
atten = atten.sigmoid()
out = torch.mul(feat, atten)
return out
def init_weight(self):
for ly in self.children():
if isinstance(ly, nn.Conv2d):
nn.init.kaiming_normal_(ly.weight, a=1)
if not ly.bias is None: nn.init.constant_(ly.bias, 0)
class ContextPath(nn.Module):
def __init__(self, *args, **kwargs):
super(ContextPath, self).__init__()
self.resnet = Resnet18()
self.arm16 = AttentionRefinementModule(256, 128)
self.arm32 = AttentionRefinementModule(512, 128)
self.conv_head32 = ConvBNReLU(128, 128, ks=3, stride=1, padding=1)
self.conv_head16 = ConvBNReLU(128, 128, ks=3, stride=1, padding=1)
self.conv_avg = ConvBNReLU(512, 128, ks=1, stride=1, padding=0)
self.up32 = nn.Upsample(scale_factor=2.)
self.up16 = nn.Upsample(scale_factor=2.)
self.init_weight()
def forward(self, x):
feat8, feat16, feat32 = self.resnet(x)
avg = torch.mean(feat32, dim=(2, 3), keepdim=True)
avg = self.conv_avg(avg)
feat32_arm = self.arm32(feat32)
feat32_sum = feat32_arm + avg
feat32_up = self.up32(feat32_sum)
feat32_up = self.conv_head32(feat32_up)
feat16_arm = self.arm16(feat16)
feat16_sum = feat16_arm + feat32_up
feat16_up = self.up16(feat16_sum)
feat16_up = self.conv_head16(feat16_up)
return feat16_up, feat32_up # x8, x16
def init_weight(self):
for ly in self.children():
if isinstance(ly, nn.Conv2d):
nn.init.kaiming_normal_(ly.weight, a=1)
if not ly.bias is None: nn.init.constant_(ly.bias, 0)
def get_params(self):
wd_params, nowd_params = [], []
for name, module in self.named_modules():
if isinstance(module, (nn.Linear, nn.Conv2d)):
wd_params.append(module.weight)
if not module.bias is None:
nowd_params.append(module.bias)
elif isinstance(module, nn.modules.batchnorm._BatchNorm):
nowd_params += list(module.parameters())
return wd_params, nowd_params
class SpatialPath(nn.Module):
def __init__(self, *args, **kwargs):
super(SpatialPath, self).__init__()
self.conv1 = ConvBNReLU(3, 64, ks=7, stride=2, padding=3)
self.conv2 = ConvBNReLU(64, 64, ks=3, stride=2, padding=1)
self.conv3 = ConvBNReLU(64, 64, ks=3, stride=2, padding=1)
self.conv_out = ConvBNReLU(64, 128, ks=1, stride=1, padding=0)
self.init_weight()
def forward(self, x):
feat = self.conv1(x)
feat = self.conv2(feat)
feat = self.conv3(feat)
feat = self.conv_out(feat)
return feat
def init_weight(self):
for ly in self.children():
if isinstance(ly, nn.Conv2d):
nn.init.kaiming_normal_(ly.weight, a=1)
if not ly.bias is None: nn.init.constant_(ly.bias, 0)
def get_params(self):
wd_params, nowd_params = [], []
for name, module in self.named_modules():
if isinstance(module, nn.Linear) or isinstance(module, nn.Conv2d):
wd_params.append(module.weight)
if not module.bias is None:
nowd_params.append(module.bias)
elif isinstance(module, nn.modules.batchnorm._BatchNorm):
nowd_params += list(module.parameters())
return wd_params, nowd_params
class FeatureFusionModule(nn.Module):
def __init__(self, in_chan, out_chan, *args, **kwargs):
super(FeatureFusionModule, self).__init__()
self.convblk = ConvBNReLU(in_chan, out_chan, ks=1, stride=1, padding=0)
## use conv-bn instead of 2 layer mlp, so that tensorrt 7.2.3.4 can work for fp16
self.conv = nn.Conv2d(out_chan,
out_chan,
kernel_size = 1,
stride = 1,
padding = 0,
bias = False)
self.bn = nn.BatchNorm2d(out_chan)
# self.conv1 = nn.Conv2d(out_chan,
# out_chan//4,
# kernel_size = 1,
# stride = 1,
# padding = 0,
# bias = False)
# self.conv2 = nn.Conv2d(out_chan//4,
# out_chan,
# kernel_size = 1,
# stride = 1,
# padding = 0,
# bias = False)
# self.relu = nn.ReLU(inplace=True)
self.init_weight()
def forward(self, fsp, fcp):
fcat = torch.cat([fsp, fcp], dim=1)
feat = self.convblk(fcat)
atten = torch.mean(feat, dim=(2, 3), keepdim=True)
atten = self.conv(atten)
atten = self.bn(atten)
# atten = self.conv1(atten)
# atten = self.relu(atten)
# atten = self.conv2(atten)
atten = atten.sigmoid()
feat_atten = torch.mul(feat, atten)
feat_out = feat_atten + feat
return feat_out
def init_weight(self):
for ly in self.children():
if isinstance(ly, nn.Conv2d):
nn.init.kaiming_normal_(ly.weight, a=1)
if not ly.bias is None: nn.init.constant_(ly.bias, 0)
def get_params(self):
wd_params, nowd_params = [], []
for name, module in self.named_modules():
if isinstance(module, (nn.Linear, nn.Conv2d)):
wd_params.append(module.weight)
if not module.bias is None:
nowd_params.append(module.bias)
elif isinstance(module, nn.modules.batchnorm._BatchNorm):
nowd_params += list(module.parameters())
return wd_params, nowd_params
class BiSeNetV1(nn.Module):
def __init__(self, n_classes, aux_mode='train', *args, **kwargs):
super(BiSeNetV1, self).__init__()
self.cp = ContextPath()
self.sp = SpatialPath()
self.ffm = FeatureFusionModule(256, 256)
self.conv_out = BiSeNetOutput(256, 256, n_classes, up_factor=8)
self.aux_mode = aux_mode
if self.aux_mode == 'train':
self.conv_out16 = BiSeNetOutput(128, 64, n_classes, up_factor=8)
self.conv_out32 = BiSeNetOutput(128, 64, n_classes, up_factor=16)
self.init_weight()
def forward(self, x):
H, W = x.size()[2:]
feat_cp8, feat_cp16 = self.cp(x)
feat_sp = self.sp(x)
feat_fuse = self.ffm(feat_sp, feat_cp8)
feat_out = self.conv_out(feat_fuse)
if self.aux_mode == 'train':
feat_out16 = self.conv_out16(feat_cp8)
feat_out32 = self.conv_out32(feat_cp16)
return feat_out, feat_out16, feat_out32
elif self.aux_mode == 'eval':
return feat_out,
elif self.aux_mode == 'pred':
feat_out = feat_out.argmax(dim=1)
return feat_out
else:
raise NotImplementedError
def init_weight(self):
for ly in self.children():
if isinstance(ly, nn.Conv2d):
nn.init.kaiming_normal_(ly.weight, a=1)
if not ly.bias is None: nn.init.constant_(ly.bias, 0)
def get_params(self):
wd_params, nowd_params, lr_mul_wd_params, lr_mul_nowd_params = [], [], [], []
for name, child in self.named_children():
child_wd_params, child_nowd_params = child.get_params()
if isinstance(child, (FeatureFusionModule, BiSeNetOutput)):
lr_mul_wd_params += child_wd_params
lr_mul_nowd_params += child_nowd_params
else:
wd_params += child_wd_params
nowd_params += child_nowd_params
return wd_params, nowd_params, lr_mul_wd_params, lr_mul_nowd_params
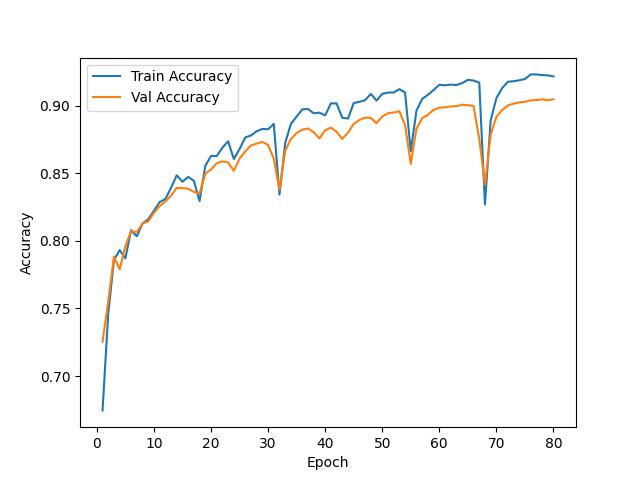
训练过程精度变化
测试精度

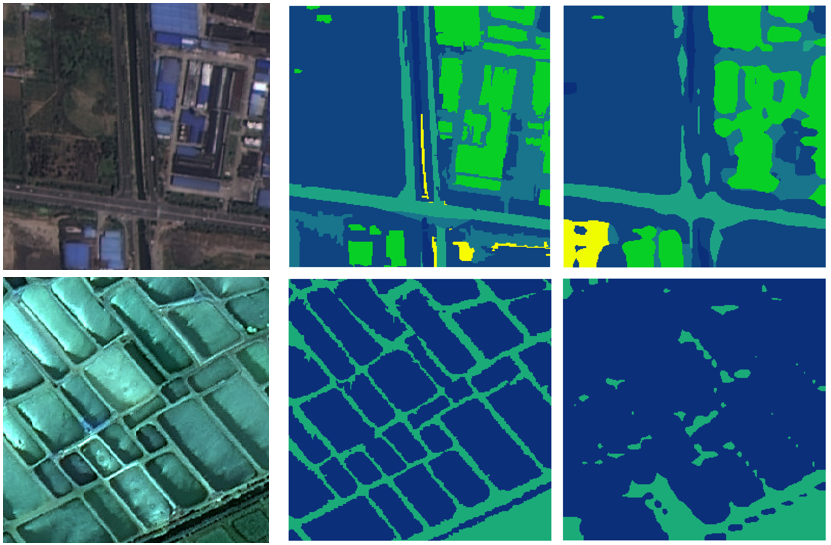
结果展示
总结
今天的分享到此结束,感兴趣的点点关注,后续将分享更多案例。
参考资料
WHDLD: https://sites.google.com/view/zhouwx/dataset#h.p_hQS2jYeaFpV0
[2]BiSeNet: https://arxiv.org/abs/1808.00897
本文由 mdnice 多平台发布
相关文章:
BiseNet实现遥感影像地物分类
遥感地物分类通过对遥感图像中的地物进行准确识别和分类,为资源管理、环境保护、城市规划、灾害监测等领域提供重要信息,有助于实现精细化管理和科学决策,提升社会治理和经济发展水平。深度学习遥感地物分类在提高分类精度、自动化程度、处理…...

【SpringBoot系列】SpringBoot时间字段格式化
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 推荐:kwan 的首页,持续学…...

.net core 连接数据库,通过数据库生成Modell
1、安装EF Core Power Tools:打开Vs开发工具→扩展→管理扩展 2、(切记执行这步之前确保自己的代码不存在编写或者编译错误!)安装完成后在你需要创建数据库实体的项目文件夹上面单击右键,找到EF Core 工具(必须安装扩展之和才会有…...

开发工具idea中推荐插件
主要是记录一下idea中实用插件,方便开发,换个电脑工作的时候也可以直接在市场中下载使用。 1、Easy Javadoc 自动生成javadoc文档注释,基本上是按照字段名或者方法名翻译的,还是相当好用的。 2、EasyYapi 可以快捷生成接口文档…...

[c++]—string类___深度学习string标准库成员函数与非成员函数
要相信别人能做出来自己一定可以做出来,只不过是时间没到而已 目录 🚩string类对象capacity操作 💻reserve()保留 💻resize() 🚩string类对象元素访问操作 💻operator[]和at() 💻operator…...

PHP 双门双向门禁控制板实时监控源码
本示例使用设备: 实时网络双门双向门禁控制板可二次编程控制网络继电器远程开关-淘宝网 (taobao.com) <?PHPheader("content-type:text/html;charsetGBK");$ThisIpget_local_ip(); //获取电脑IP地址 $server udp://.$ThisIp.:39192; $sock…...
【源码解析】聊聊线程池 实现原理与源码深度解析(二)
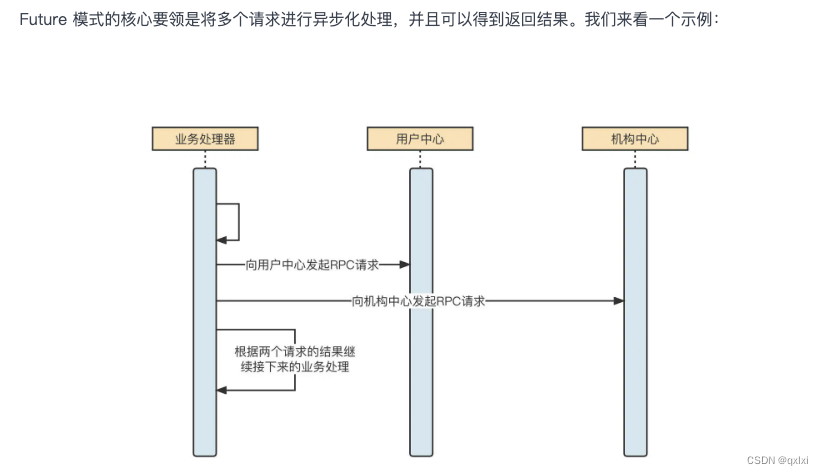
AbstractExecutorService 上一篇文章中,主要介绍了AbstractExecutorService的线程执行的核心流程,execute() 这个方法显然是没有返回执行任务的结果,如果我们需要获取任务执行的结果,怎么办? Callable 就是一个可以获…...
+ MySQL(Docker)环境构筑注意点)
本地Lambda(SAM LI)+ MySQL(Docker)环境构筑注意点
目录构成 mysql8 ├─data ├─logs └─docker├─docker-compose.yml├─.env├─config└─my.cnf .env DB_NAMEtest_db ROOT_DB_PASSroot_password DB_USERtest_user DB_PASStest_password DB_PORT3306 TZAsia/Tokyo docker-compose.yml version: "3.6" ser…...
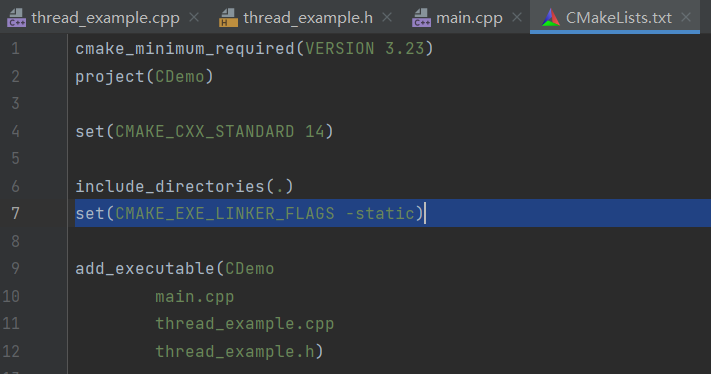
Windows下打包C++程序无法执行:无法定位程序输入点于动态链接库
1、问题描述 环境:CLionCMakeMinGW64遇到问题:打包的exe无法运行,提示无法定位程序输入点于动态链接库。 2、解决思路 通过注释头文件的方式,初步定位问题是因为使用了#include <thread> 多线程库引起的。而且exe文件…...

Android 12 打开网络ADB并禁用USB连接ADB
平台 RK3588 Android 12 Android 调试桥 (adb) Android 调试桥 (adb) 是一种功能多样的命令行工具,可让您与设备进行通信。adb 命令可用于执行各种设备操作,例如安装和调试应用。adb 提供对 Unix shell(可用来在设备上运行各种命令&am…...

基于Langchain的txt文本向量库搭建与检索
这里的源码主要来自于Langchain-ChatGLM中的向量库部分,做了一些代码上的修改和封装,以适用于基于问题和包含数据库表描述的txt文件(文件名为库表名,文件内容为库表中的字段及描述)对数据库表进行快速检索。 中文分词…...

vue2-router
1.基础 1.1.安装 npm install vue-router3.6.5 1.2.引入 import VueRouter from "vue-router" 1.3.注册 Vue.use(VueRouter) 1.4.创建 const router new VueRouter({routes: [{path:/page1, page1},{path:/page2, page2}]} ) 1.5.引用 new Vue({render: h >…...

css新闻链接案例
利用html和css构建出新闻链接案例,使用渐变色做出背景色变化 background: linear-gradient(to bottom, rgb(137, 210, 251), rgb(238, 248, 254), white); 利用背景图片,调整位置完成 dd { height: 28px; line-height: 28px; background-image: url(./图…...
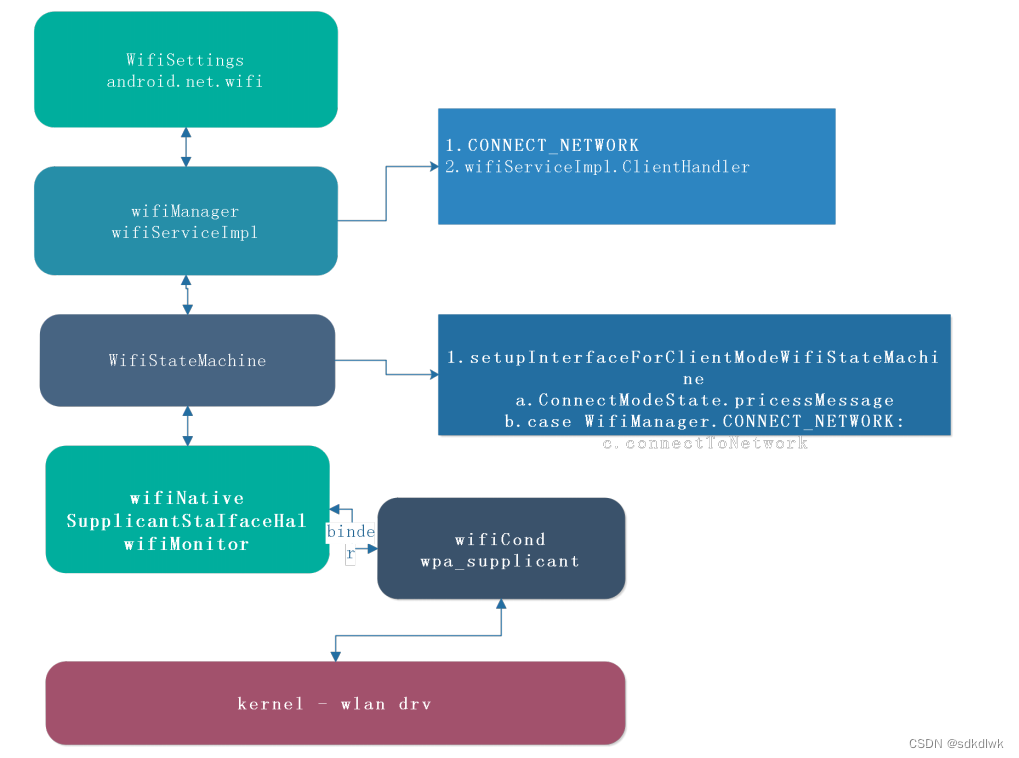
Android wifi连接和获取IP分析
wifi 连接&获取IP 流程图 代码流程分析 一、关联阶段 1. WifiSettings.submit – > WifiManager WifiSettings 干的事情比较简单,当在dialog完成ssid 以及密码填充后,直接call WifiManager save 即可WifiManager 收到Save 之后,就开…...
)
MLIR笔记(5)
4.3.4. 图区域 在MLIR中,区域里类似图的语义由RegionKind::Graph来表示。对没有控制流的并发语义,以及通用有向图数据结构的建模,图区域是合适的。图区域适用于表示耦合值之间的循环关系,这些关系没有基本的序。例如,…...
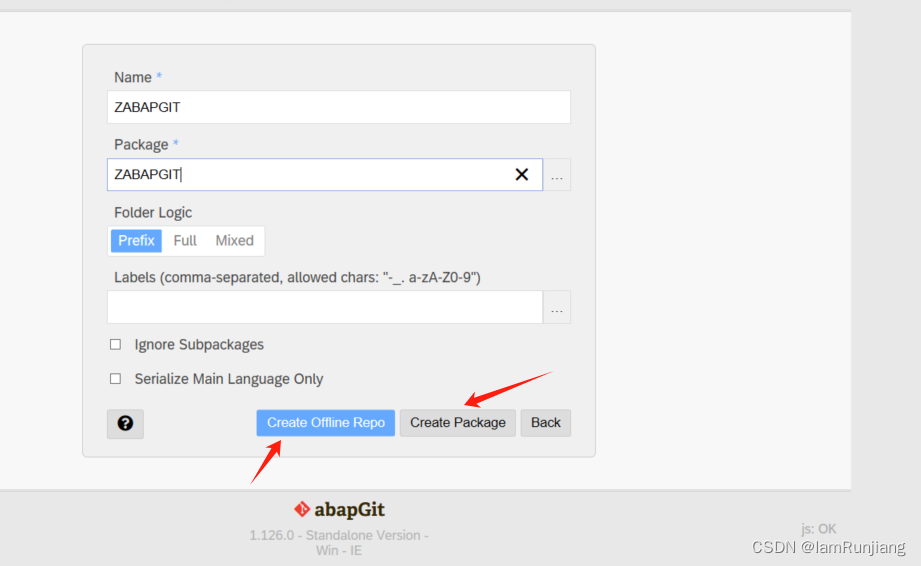
abapgit 安装及使用
abapgit 需求 SA[ BASIS 版本 702 及以上 版本查看路径如下: 安装步骤如下: 1. 下载abapgit 独立版本 程序 链接如下:raw.githubusercontent.com/abapGit/build/main/zabapgit_standalone.prog.abap 2.安装开发版本 2.1 在线安装 前置条…...

园区无线覆盖方案(智慧园区综合解决方案)
李经理正苦恼头疼的工业园区数字化改造项目。近年企业快速增长,园区内Argent工业设备激增,IT部门应接不暇。为确保生产系统稳定运行,IT管理团队经过反复摸索,决定进行全面的数字化升级。然而改造之艰巨远超想象——混杂的接入环境、复杂的专线部署、长达数月的建设周期,种种…...

配置中心--Spring Cloud Config
目录 概述 环境说明 步骤 创建远端git仓库 准备配置文件 配置中心--服务端 配置中心--客户端 配置中心的高可用 配置中心--服务端 配置中心--客户端 消息总线刷新配置 配置中心--服务端 配置中心--客户端 概述 因为微服务架构有很多个服务,手动一个一…...
笔记-模拟角频率和数字角频率的关系理解
先建议阅读前人此文(点击这里),有助于理解。 模拟频率:f 模拟角频率:Ω 数字角频率:ω 其中:在模拟信号中Ω 2πf 正弦波表示:sin(2πft) sin(Ωt) 数字信号就是离散的ÿ…...

Zookeeper+Kafka集群
注:本章使用的Kafka为2.7.0版本 Zookeeper概述 1.Zookeeper定义 Zookeeper是一个开源的分布式的,为分布式框架提供协调服务的Apache项目。 2.Zookeeper工作机制 Zookeeper从设计模式角度来理解:是一个基于观察者模式设计的分布式服务管理…...

5分钟快速上手APK Installer:在Windows上安装Android应用的终极指南
5分钟快速上手APK Installer:在Windows上安装Android应用的终极指南 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 你是否想在Windows电脑上直接安装和运行…...

小白程序员必看:收藏这份AI黑话指南,轻松入门大模型世界!
本文用大白话解释了AI领域几个核心概念:AI是总称,LLM是推理模型,Agent能独立执行任务,MCP是标准化接口,Skills是技能包。文章通过生活化比喻和实例,帮助读者理解这些概念如何协同工作,实现高效自…...

2026年图片换背景免费工具完全指南:一键抠图软件推荐
现在是5月,我想很多人都在为各种证件照、商品图、头像等需要换背景的图片犯愁。前两天有朋友问我"哪个软件可以给图片换背景",我才意识到很多人还在用古老的PS或者繁琐的在线工具。今天就来给大家分享一下2026年最好用的图片换背景工具&#x…...

别再用眼睛猜阈值了!Halcon threshold函数实战:5分钟搞定车牌字符分割
工业视觉实战:Halcon阈值分割在车牌识别中的精准应用 在机器视觉领域,车牌识别系统是典型的工业应用场景之一。而字符分割作为识别流程中的关键环节,直接影响最终识别准确率。许多初学者往往陷入一个误区——仅凭肉眼观察随意设置阈值参数&am…...

BUUCTF:[网鼎杯 2018]Fakebook 漏洞链深度剖析:从SQL注入到SSRF的实战利用
1. 初探Fakebook:信息收集与源码泄露 打开题目链接后,我习惯性地在URL后添加/robots.txt进行探测。这个文件就像网站的"藏宝图",经常能发现开发者不想被公开的路径。果然,在这里发现了/user.php.bak这个备份文件。下载后…...

长裕集团上交所上市:大涨562%市值375亿 年营收18亿净利2.6亿
雷递网 雷建平 5月11日 长裕控股集团股份有限公司(简称:“长裕集团”,股票代码:“603407”)今日在上交所主板上市。长裕集团发行价为13.86元,发行4100万股,募资总额为5.68亿元。长裕集团今日开盘…...
函数挪到自己的.c文件里(STM32F4实战))
告别CubeMX代码洁癖:教你如何把main()函数挪到自己的.c文件里(STM32F4实战)
重构STM32工程的艺术:将main()迁移到自定义文件的实战指南 每次打开CubeMX生成的工程,看到那个被各种初始化代码塞满的main.c文件,你是否也感到一丝不适?作为一名有追求的嵌入式开发者,我们渴望对项目结构拥有绝对掌控…...

RapidIO多播技术原理与应用实践
1. RapidIO多播技术概述 在分布式计算和高速互连系统中,多播(Multicast)技术扮演着至关重要的角色。简单来说,多播就像是在会议室里用广播系统发布通知——只需说一次,所有打开扬声器的房间都能同时听到。RapidIO作为高…...

哔哩下载姬完全指南:三步掌握B站视频批量下载技巧
哔哩下载姬完全指南:三步掌握B站视频批量下载技巧 【免费下载链接】downkyi 哔哩下载姬downkyi,哔哩哔哩网站视频下载工具,支持批量下载,支持8K、HDR、杜比视界,提供工具箱(音视频提取、去水印等࿰…...

ComfyUI ControlNet Aux预处理器深度解析:从模型下载到性能优化全攻略
ComfyUI ControlNet Aux预处理器深度解析:从模型下载到性能优化全攻略 【免费下载链接】comfyui_controlnet_aux ComfyUIs ControlNet Auxiliary Preprocessors 项目地址: https://gitcode.com/gh_mirrors/co/comfyui_controlnet_aux ComfyUI ControlNet Aux…...