pixhawk2.4.8-地面站配置-APM固件
文章目录
- 一、硬件准备
- 二、软件准备
- 1 已实飞测试
- 2 MP地面站 任意版本下载:
- 3 APM固件 任意版本下载:
- 三、飞控校准
- 1 刷固件
- 2 机架选择
- 3 加速度计校准
- 4 指南针校准
- 5 遥控器校准
- 6 飞行模式
- 7 紧急断电&无头模式
- 8 基础参数设置
- 9 电流计校准
- 10 电调校准
- 11 起飞前检查(每一项都非常重要)
- 12 飞行经验
- 四、遇到的问题
- 1 MP地面站没有显示 全部参数:
- 2 炸鸡—气压计定高—飞机冲天:
- 3 飞控突然无法连接地面站
- 4 使用权盛光流,飞机画圆
- 五、其他
- 0 APM常用参数
- 1 灯语、蜂鸣器
- 2 数传
- 3 权盛光流
- 4 GPS
- 5 TFmini Plus
相关网址汇总:
APM固件:
pix2.4.8参考教程(齐全但古老)
APM固件下载:官网
MP地面站下载:官网
APM日志分析:基础使用
APM日志分析:诊断问题
硬件:
硬件扫盲:基础知识
装机教程:F450四轴
硬件选型:电机、电调、电池
视频:
飞控校准:Pix2.4.8,APM固件
飞控校准:Pix2.4.8,PX4固件
浙大教程:从0制作自主空中机器人
入门常识:
(1)飞控包含硬件和软件,硬件是飞控板子,软件就是飞控固件。apm和px4说的是飞控软件也就是固件,pixhawk2.4.8说的是硬件,也就是那块板子。
(2)常见的固件:APM、PX4。还有其他的我没用过。
(3)常见的硬件:pixhawk2.4.8(没有官方,是国内厂家参考3dr的pixhawk1改的,古老但便宜)。官方认证的厂家:holybro的pixhawk系列pix456,雷讯的v3v5等等。这些都是硬件,有的可以运行APM固件,有的可以运行PX4固件,大多数硬件是两种固件都支持。所以pix2.4.8既可以下APM固件,又可以下PX4固件。
(4)地面站:有MP、QGC。MP对APM固件兼容性好,所以一般用APM固件,就会用MP地面站。QGC对PX4固件的兼容性好,用PX4固件,就用QGC地面站来调试飞控。
一、硬件准备
稳定飞行的前提:
- 合适的动力套配置
- 正确的飞控接线
二、软件准备
写在前面: 建议第一次用的话,用商家提供的 地面站和固件版本。
因为MP版本和APM版本的适配问题,真的真的是很大一个坑。最好先走别人走过的路,走通了再去自由发挥,不然白白浪费时间。
下面提供我试飞成功过的版本。
下面提供任意版本固件和地面站的下载方法。
1 已实飞测试
-
已测试的组合
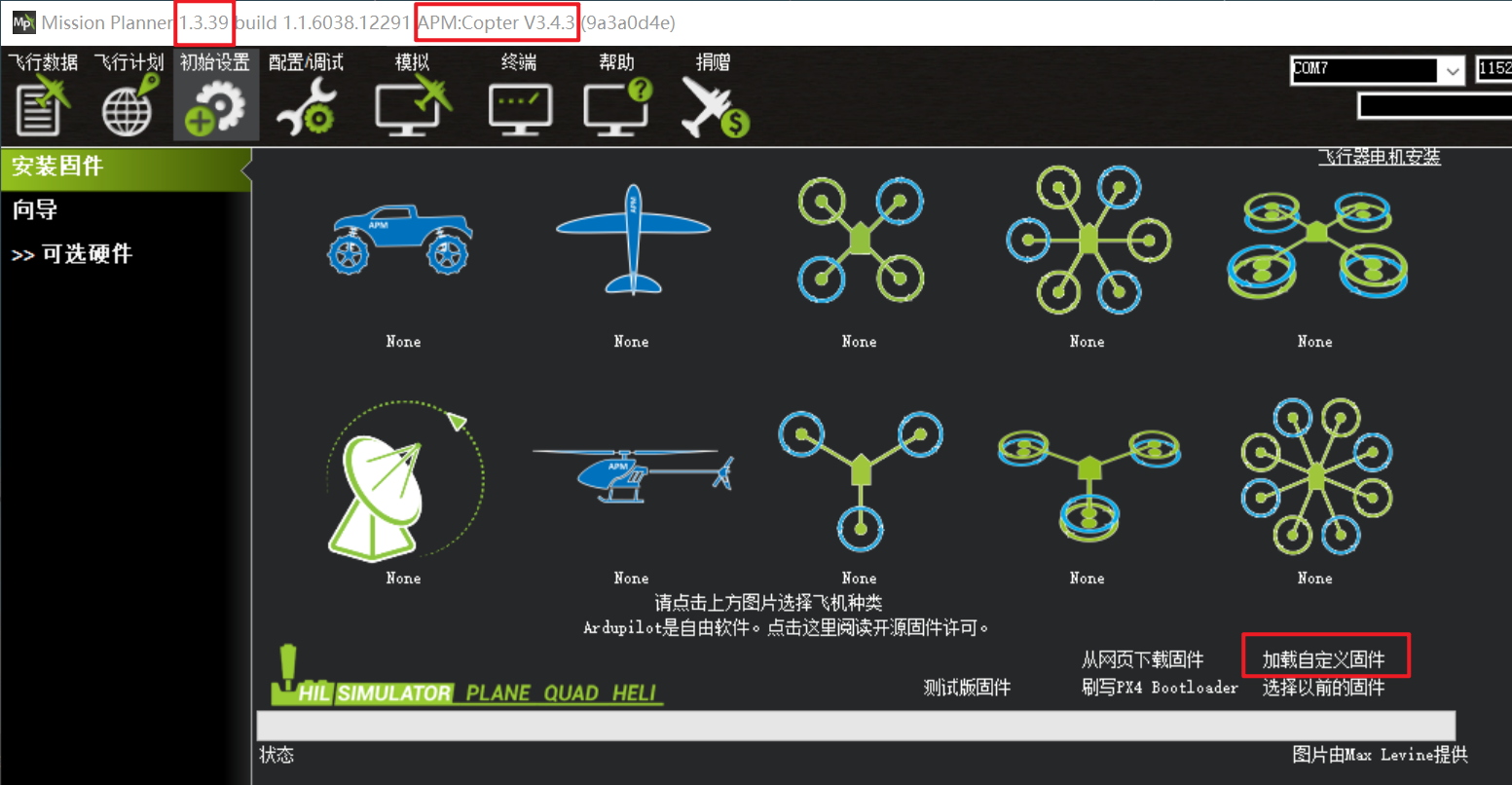
已测试:远航2.4.8飞控,权盛光流固件3.4.3,地面站1.3.39。姿态飞。
已测试:权盛2.4.8飞控,权盛光流固件3.4.3,地面站1.3.39。权盛光流测试,定高还行,定点不行直接发散,可能是飞机动力配置问题。
-
权盛推荐(已测试)
MP地面站:1.3.39
APM固件:3.4.3(权盛光流固件)
下载链接:https://wwzr.lanzout.com/b047plhwh 密码:123
2 MP地面站 任意版本下载:
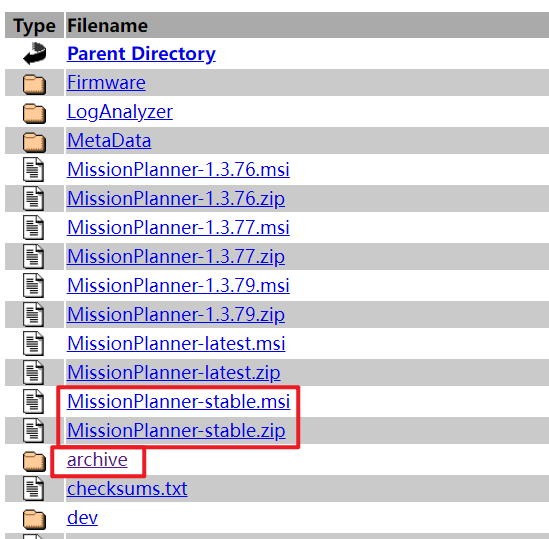
官网下载:https://firmware.ardupilot.org/Tools/MissionPlanner/
“archive” 里有旧版本的。.msi 是需要安装的。.zip是绿色不需要安装直接解压使用的。
需要注意的是:电脑如果是第一次安装地面站,要选.msi的,因为在安装过程中会安装所需的驱动。
3 APM固件 任意版本下载:
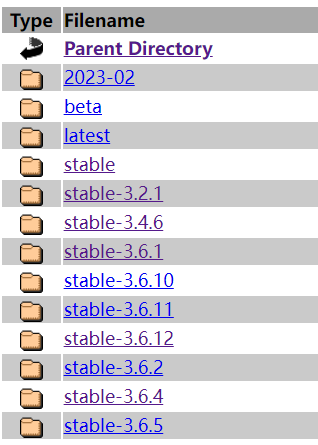
官网下载:https://firmware.ardupilot.org/Copter/
下载任意版本教程:http://pix.1yuav.com/ru-he-huo-qu-li-xian-gu-jian.html
总结,自己下载固件时会有这些选项:PX4、fmu v2、fmu v3。
pix2.4.8选择是:有v3选v3,没有v3选v2,没有v2选px4 quad(四轴)。
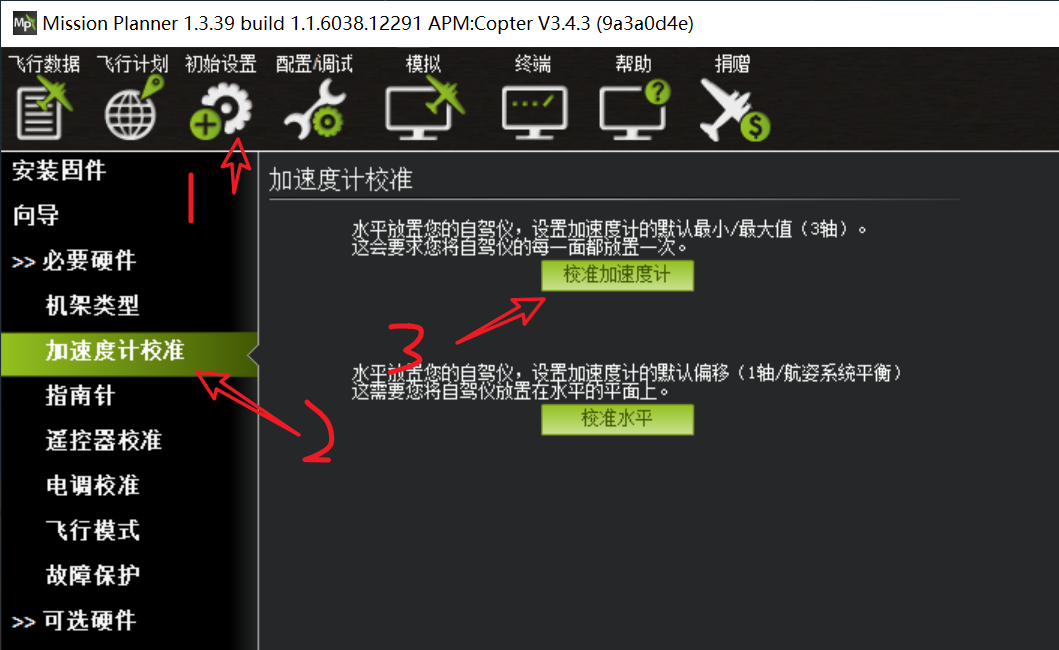
三、飞控校准
1 刷固件
必须用USB供电。
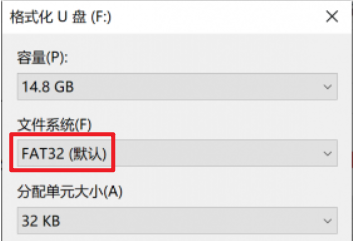
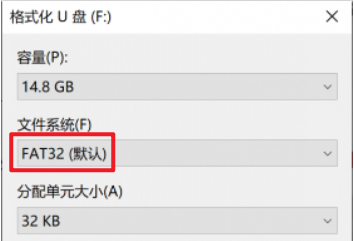
内存卡要安好,不然可能刷好固件无法连接地面站。受2.4.8硬件限制,内存卡最好小于16G,格式必须是FAT32。
如果出现刷不进固件,连接不到地面站的问题,可以考虑下内存卡问题。
2 机架选择
- 机架我是四旋翼。
- 接下来校准按这个顺序来。
下面的校准每一项都是必要的,特别是:别疏忽掉 电流计 和 电调,会炸鸡。

3 加速度计校准
Place vehicle level and press any key(飞机水平放置)完成后回车
Place vehicle on its LEFT side and press any key(飞控面 向左边放置)完成后回车
Place vehicle on its RIGHT side and press any key(向右边放置)完成后回车
Place vehicle nose DOWN and press any key(向下放置)完成后回车
Place vehicle nose UP and press any key(向上放置)完成后回车
Place vehicle on its BACK and press any key(反过来放置)完成后回车
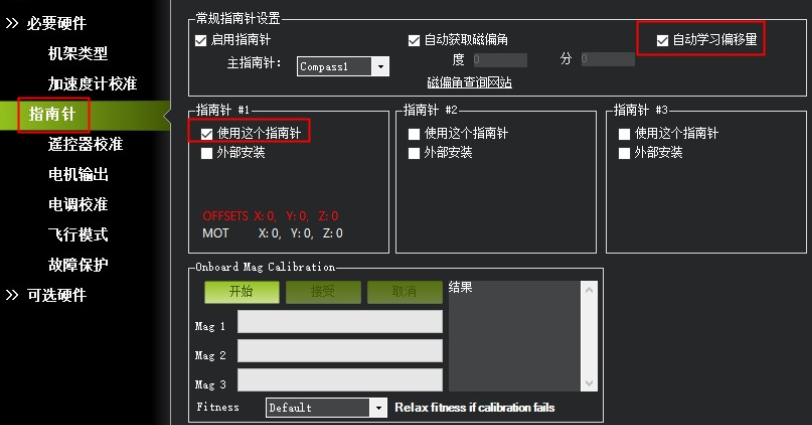
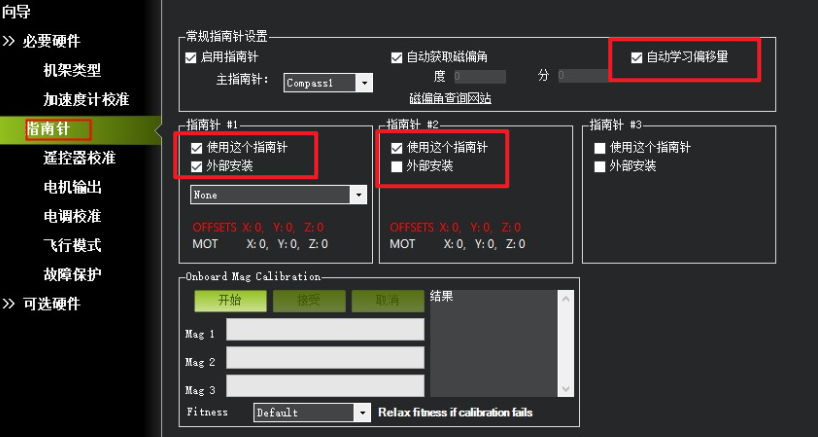
4 指南针校准
无GPS:
有GPS:
5 遥控器校准
需要注意的是:APM固件,遥控器pitch通道要设置为反向。富斯i6s遥控器对应的是通道2要设置反向。
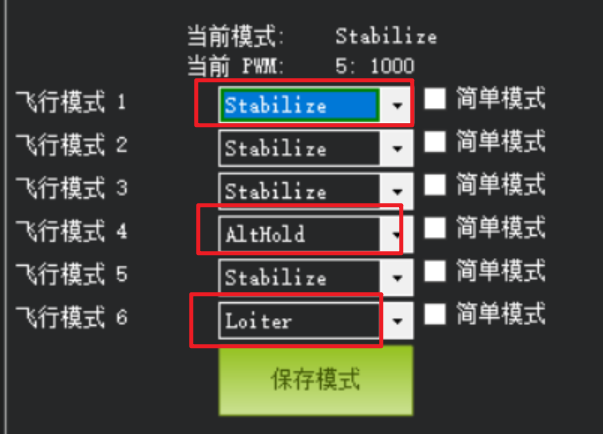
6 飞行模式
APM固件默认 通道5 为设置飞行模式通道。
姿态、定高、定点。
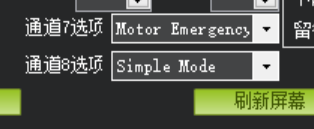
7 紧急断电&无头模式
配置调试选项,扩展参数。
通道7,设置为:Motor Emergency …
通道8,设置为 simple mode
遥控器上对应的也要设置好通道。
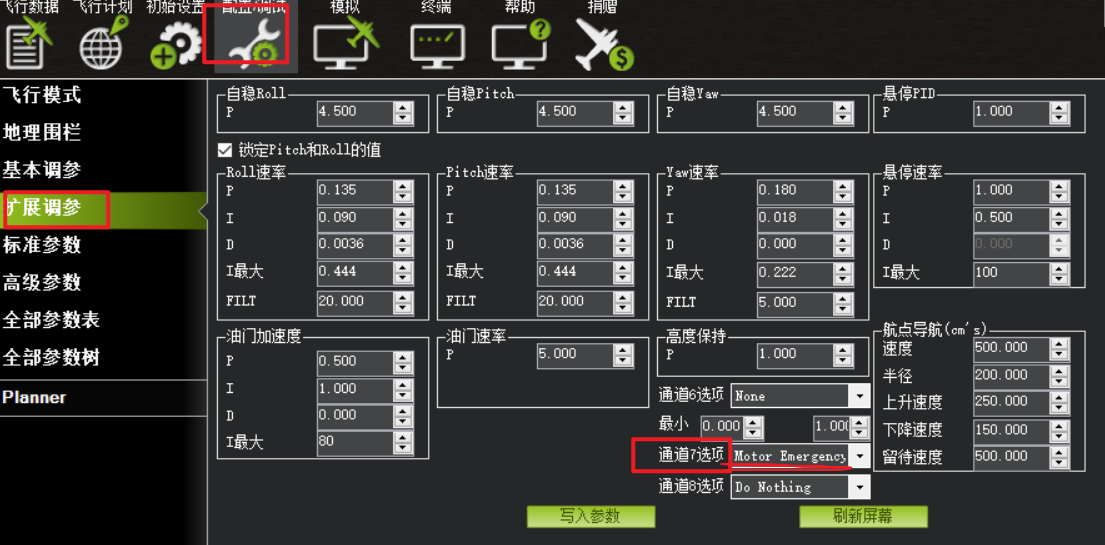
通道8,设置为简单模式(无头模式)切换键。
8 基础参数设置
禁用安全开关:BRD_SAFETYENABLE 0 (飞机没装安全开关的话,就必须设置)

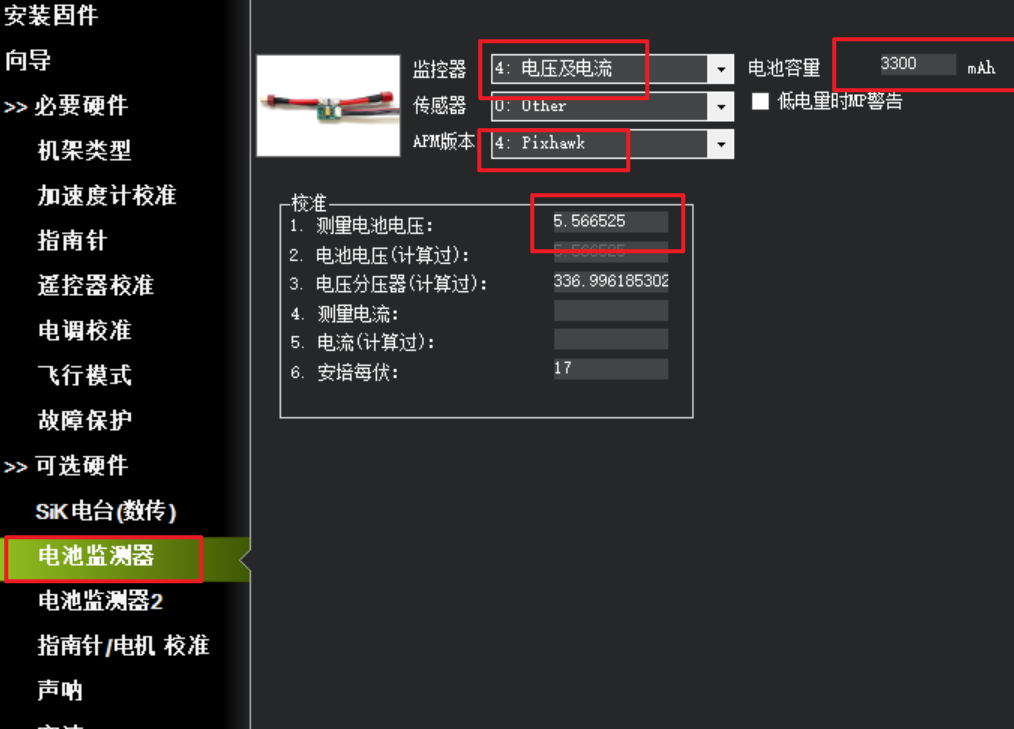
9 电流计校准
10 电调校准
首先需要禁用安全开关。 主要是因为我飞机上没装安全开关。
| 功能 | 参数 | 值 |
|---|---|---|
| 禁用安全开关 | BRD_SAFETYENABLE | 0 |
我试了,自动校准不行。
手动校准步骤:断开飞行器所有电源,遥控器油门拉到最高并保持。插上电池,看到飞控红绿黄闪烁,断开电池,再插上电池,电调滴滴两声,油门拉到最低,电调滴一声,校准完成。
11 起飞前检查(每一项都非常重要)
一定要检查好再飞
疏忽了,就炸鸡
炸鸡了,场面惨烈,心里阴影,
-
电机转向 是否正确 (飞机解锁,轻推油门,用手摸)
-
姿态 是否正常(地面站上看)
-
刹车键 是否正常(不装桨叶,解锁飞机,遥控器扣下刹车键)
-
飞行模式 是否正常(遥控器切换,地面站上看)
-
(可选)光流数据(超声波、光流)是否正常。(没用光流就不管)
12 飞行经验
- 第一个是抓遥控器的手势。
四、遇到的问题
1 MP地面站没有显示 全部参数:
解决方法:https://blog.csdn.net/liberatetheus/article/details/77970479
2 炸鸡—气压计定高—飞机冲天:
权盛光流固件3.4.3,姿态模式飞行正常,飞行时切换定高,冲天了。
权哥给的思路是:可能是飞控减震问题,导致的这种现象。
后面换了超声波就没这样。
3 飞控突然无法连接地面站
-
固件:光流3.4.3 地面站:1.3.39
-
解决:电池上电后就可以了。猜测是没电池供电,没过自检?怎么会影响到连接地面站。
-
真实原因:内存 卡问题,换了内存卡好了。不知是满了还是坏了。内存卡没满,格式化后也好了。
-
内存卡:最好是小于16G,格式必须是FAT32。
4 使用权盛光流,飞机画圆
-
定点模式,有定点效果,说明光流是能用,就是逐渐发散,飞机画圆飞,定高时电机有一冲一冲的现象。
-
猜测原因:一开始觉得是飞机动力不足。
s500机架,10寸桨,
银燕2216 kv810电机,
好盈乐天40A电调
3300mah 25c 4s。
权哥说不是动力问题。目前不明原因。
-
我猜测可能是动力套的搭配问题,比较明显的问题是 电池放电能力3.3x25=82.5A 和 电调最高电流40x4=160A 不符,按道理电池放电能力应该大于电调最大电流。【下次试试换高C电池】
五、其他
0 APM常用参数
| 功能 | 参数 | 值 |
|---|---|---|
| 禁用安全开关 | BRD_SAFETYENABLE | 0 |
| 电机怠速值设为0 | MOT_SPIN_ARM | 0 |
| 电机解锁检查 | ARMING_CHECK | 64 |
| 一上电就开始记录日志,直到断电 | LOG_DISARMED | 1 |
1 灯语、蜂鸣器
黄色双闪:自检失败。
蓝闪烁:无GPS,未解锁。
蓝常亮:已解锁。
绿闪烁:有GPS,未解锁。
绿常亮:已解锁。

2 数传
飞控默认:数传连接波特率是57600,USB连接是115200。别选错。
权盛数传设置:数传用USB连接电脑,选择好串口和波特率,但不点连接。
主要是更改图里的 网络ID 和 通道,两个配置一样就可以正常通信了。

3 权盛光流
- 看他的教程文档。
- 主要是:专用固件,接线,安装朝向,地面站配置。
4 GPS
5 TFmini Plus
相关文章:
pixhawk2.4.8-地面站配置-APM固件
文章目录一、硬件准备二、软件准备1 已实飞测试2 MP地面站 任意版本下载:3 APM固件 任意版本下载:三、飞控校准1 刷固件2 机架选择3 加速度计校准4 指南针校准5 遥控器校准6 飞行模式7 紧急断电&无头模式8 基础参数设置9 电流计校准10 电调校准11 起…...
golang 通道类型
文章目录一、什么是通道类型二、通道产生的原因三、声明channel四、创建channel五、channel相关操作1、发送值2、接收值3、关闭通道3.1 注意3.2 特点四、通道类型1、无缓冲通道2、有缓冲通道五、单向通道一、什么是通道类型 Go 语言中的通道(channel)是一…...

并发、并行、吞吐量、延迟、响应时间 含义理解
并发、并行、吞吐量、延迟、响应时间 知识点了解 1. 响应时间(RT) 理解:响应时间是指系统对请求作出响应的时间。例如一个正在运行的服务,服务内程序接受到参数请求开始,到程序计算完,并将结果返回出去结束,这段时间…...

HTTP 和 HTTPS 的区别
文章目录前言一、HTTP 与 HTTPS 的基本概念HTTPHTTPS二、HTTP 和 HTTPS协议的区别前言 浏览网站时,我们会发现网址有两种格式,一种以http://开头,一种https://开头。好像这两种格式差别不大,只多了一个s,实际上他们有…...
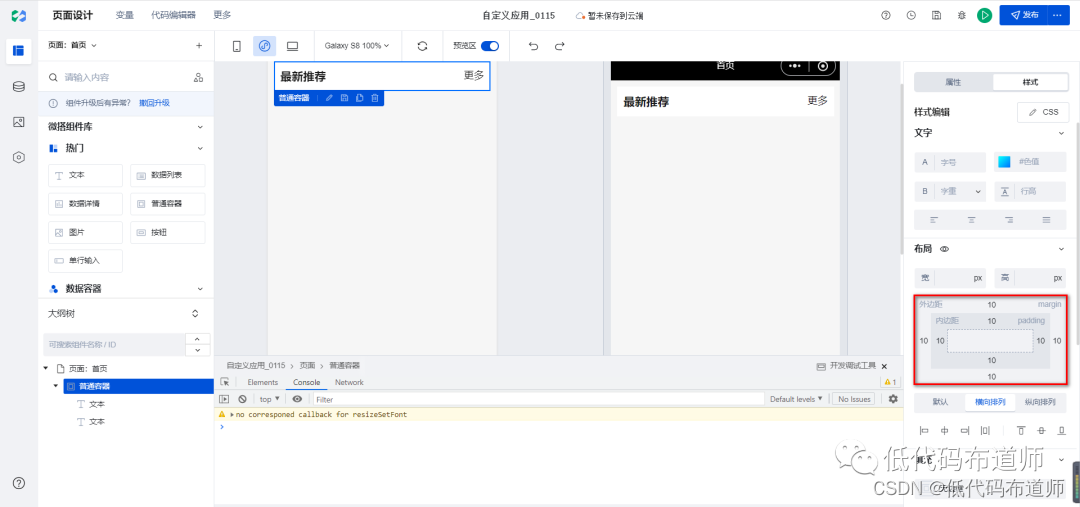
微搭低代码从入门到精通07-基础布局组件
低码开发不同于传统开发,传统开发我们通常需要编写前端代码和后端代码。前端代码由HTML、CSS和JavaScript组成,后端代码我们通常要用后端语言比如Java来编写接口。 低码开发的特点是可视化开发,在编辑器中通过组件的拖拽来完成页面的编制。如…...
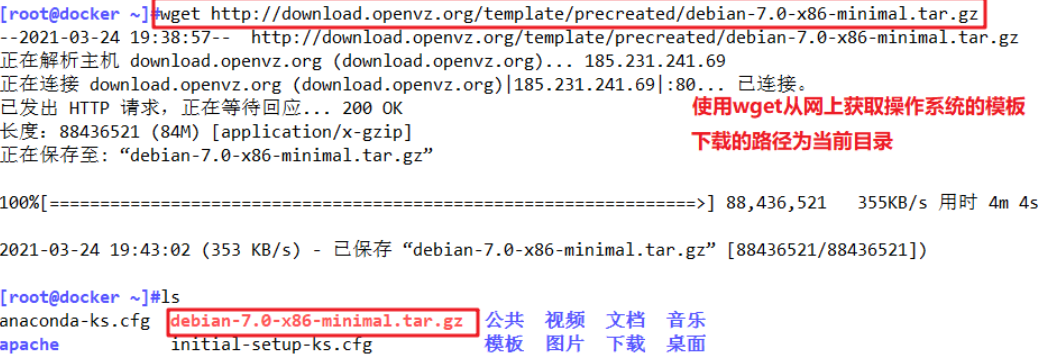
Docker镜像的创建
Docker镜像Docker镜像Docker 镜像是一个特殊的文件系统提供容器运行时所需的程序、库、资源、配置等文件包含一些为运行时准备的一些配置参数(如匿名卷、环境变量、用户等)镜像不包含任何动态数据,其内容在构建之后也不会被改变。Docker镜像的…...
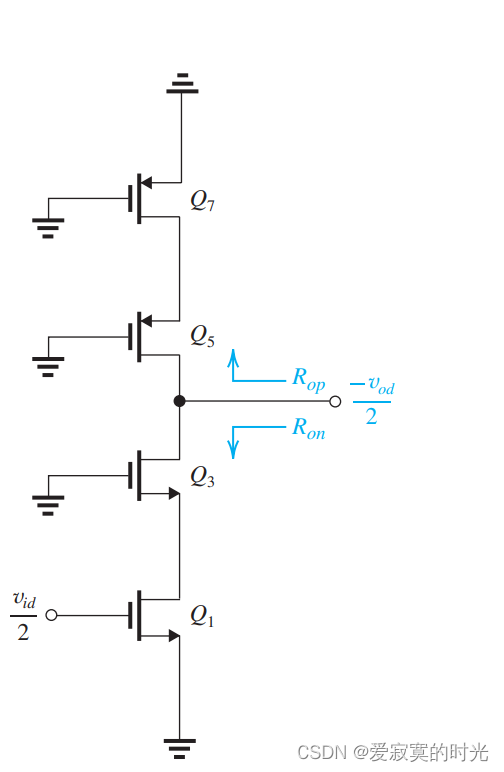
电子技术——MOS差分输入对
电子技术——MOS差分输入对 差分输入系统因其极高的共模抑制能力,差分输入几乎是是构建所有通用模拟IC的基本前级输入,也是现代信号传输理论的基础。本节我们讲解MOS差分输入对。 MOS差分输入对 下图展示了MOS差分输入对的基本原理图: 一个…...

树莓派 - 小记
文章目录关于树莓派Raspberry Pi OSGPIOScratch 编程Minecraft相关硬件关于树莓派 树莓派:Raspberry Pi,由美国树莓派基金会开发,是一款专门用于计算机教育的极简计算机。 第一代发布于 2012年。 特点:精致小巧,价格低…...
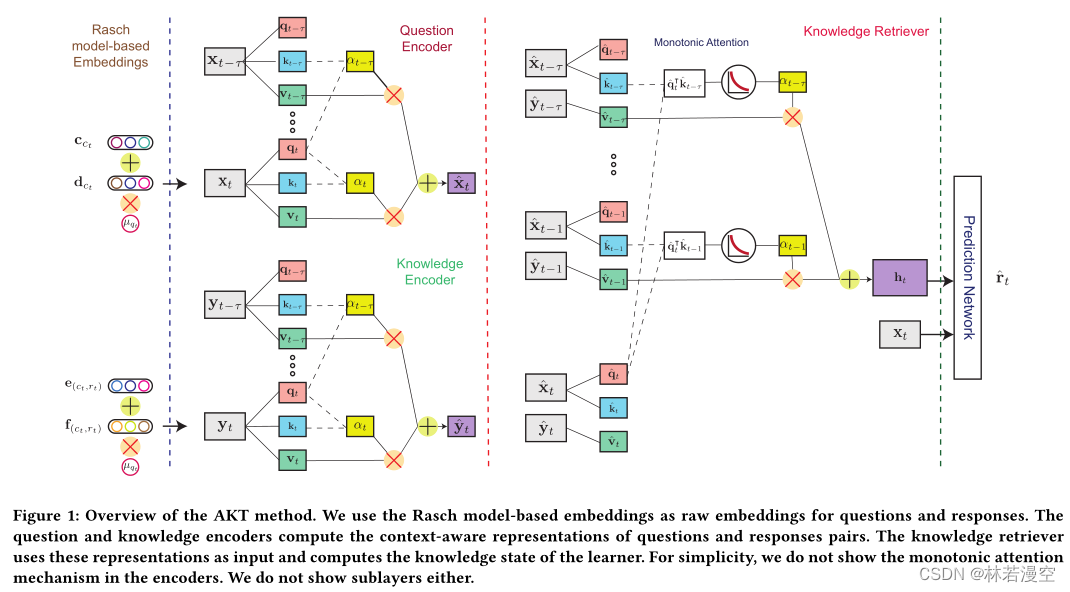
【论文解读|KDD2020】AKT. Context-Aware Attentive Knowledge Tracing
文章目录摘要1 引言1.1 贡献3 模型3.4 基于Rasch模型的嵌入5 结论摘要 知识追踪(KT)是指根据学习者在教育应用中的过去表现预测未来学习者表现的问题。KT最近使用灵活的基于深度神经网络的模型的发展在这一任务中表现出色。然而,这些模型通常提供有限的可解释性&am…...

Geek Uninstaller:向流氓软件火力全开,超良心的软件彻底卸载工具
写在前面 我们在电脑上安装软件,以及在使用软件的过程中,会产生一些程序文件、注册表项和临时文件等,用来支持软件的正常使用,都是正常现象。 但是,在卸载软件时,很多软件自身的卸载程序很不负责任&#…...

Java线程池
什么是线程池 线程池是指在初始化一个多线程应用程序过程中创建一个线程集合,然后在需要执行新的任务时重用这些线程而不是新建一个线程。线程池中线程的数量通常完全取决于可用内存数量和应用程序的需求。然而,增加可用线程数量是可能的。线程池中的每…...
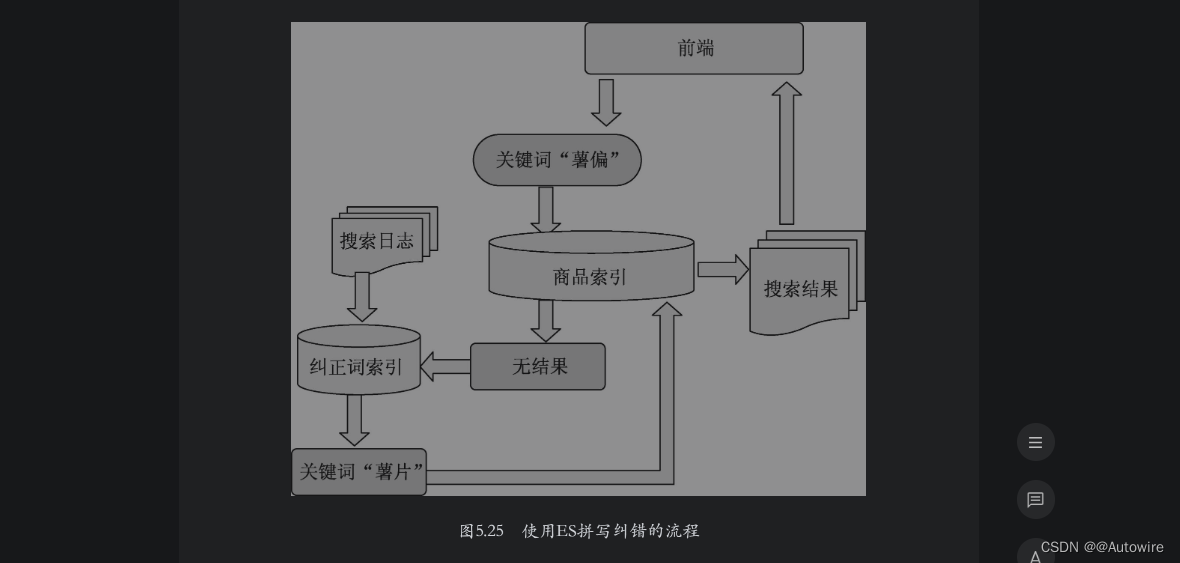
2023-02-10 - 5 文本搜索
与其他需要精确匹配的数据不同,文本数据在前期的索引构建和搜索环节都需要进行额外的处理,并且在匹配环节还要进行相关性分数计算。本章将详细介绍文本搜索的相关知识。 本章首先从总体上介绍文本的索引建立过程和搜索过程,然后介绍分析器的…...
,简单直白)
华为OD机试 - 最近的医院(Python),简单直白
任务混部 | 华为 OD 机试【最新】 题目 新型冠状病毒疫情的肆虐,使得家在武汉的大壮不得不思考自己家和附近定点医院的具体情况。 经过一番调查, 大壮明白了距离自己家最近的定点医院有两家。其中医院 A 距离自己的距离是 X 公里,医院 B 距离自己的距离是 Y 公里。 由于…...

Leetcode.1223 掷骰子模拟
题目链接 Leetcode.1223 掷骰子模拟 Rating : 2008 题目描述 有一个骰子模拟器会每次投掷的时候生成一个 1 到 6 的随机数。 不过我们在使用它时有个约束,就是使得投掷骰子时,连续 掷出数字 i 的次数不能超过 rollMax[i](i 从 1…...

数据分析到底该怎么学呢?讲真,真不难!
这几年,“数据分析”是很火啊,在这个数据驱动一切的时代,数据挖掘和数据分析就是这个时代的“淘金”,懂数据分析、拥有数据思维,往往成了大厂面试的加分项。 比如通过数据分析,我们可以更好地了解用户画像…...

活动星投票紫砂新青年制作一个投票活动
“紫砂新青年”网络评选投票_免费链接投票_作品投票通道_扫码投票怎样进行现在来说,公司、企业、学校更多的想借助短视频推广自己。通过微信投票小程序,网友们就可以通过手机拍视频上传视频参加活动,而短视频微信投票评选活动既可以给用户发挥…...
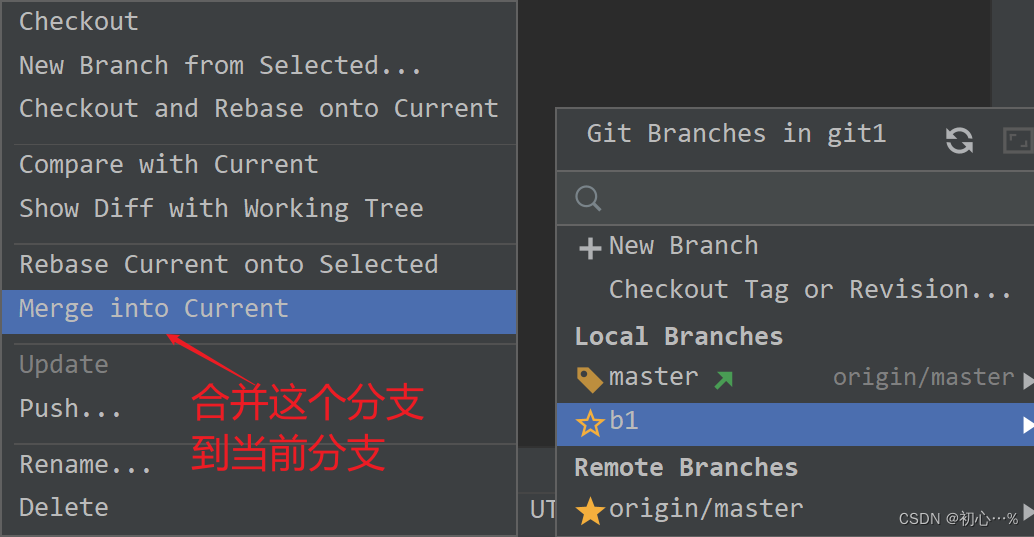
Git | 在IDEA中使用Git
目录 一、在IDEA中配置Git 1.1 配置Git 1.2 获取Git仓库 1.3 将本地项目推送到远程仓库 1.4 .gitignore文件的作用 二、本地仓库操作 2.1 将文件加入暂存区 2.2 将暂存区的文件提交到版本库 2.3 查看日志 三、远程仓库操作 3.1 查看和添加远程仓库 3.2 推送至远程仓…...
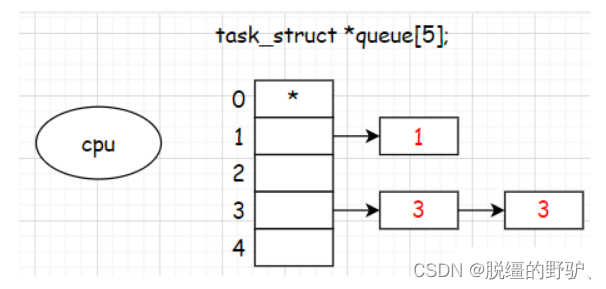
< Linux >:Linux 进程概念 (4)
目录 五、孤儿进程 六、进程优先级 6.1、基本概念 6.2、查看时实系统进程 6.3、PRI and NI 七、其他概念 四、X 状态:死亡状态 所谓进程处于 X 状态(死亡状态)代表的就是该进程已经死亡了,即操作系统可以随时回收它的资源(操作系统也可以…...
七、Java框架之MyBatisPlus
黑马课程 文章目录1. MyBatisPlus入门1.1 MyBatisPlus入门案例步骤1:创建spring boot工程步骤2:配置application.yml步骤3:创建数据库表(重点)步骤4:编写dao层步骤5:测试1.2 标准数据层开发标准…...

C语言柔性数组
目录什么是柔性数组柔性数组的使用什么是柔性数组 柔性数组是在C99中定义的 结构体的最后一个元素允许是未知大小的数组,这就叫柔性书组 柔性数组的长度可以写成0,也可以不规定数组长度 下面两种写法都是正确的 struct S { int i; int a[0];//柔性数…...
梭哈配置主线设备树)
正点原子IMX6ULL史诗级新内核Linux7.0移植教程(5)梭哈配置主线设备树
正点原子IMX6ULL史诗级新内核Linux7.0移植教程(5)梭哈配置主线设备树 仓库已经开源,可以研究补丁和直接看完整教程:https://github.com/Awesome-Embedded-Learning-Studio/imx-forge 有任何意见欢迎提出 PR!会第一时间…...

夺回社交主动权:iBeebo如何让微博回归纯粹体验
夺回社交主动权:iBeebo如何让微博回归纯粹体验 【免费下载链接】iBeebo 第三方新浪微博客户端 项目地址: https://gitcode.com/gh_mirrors/ib/iBeebo 你是否经历过这样的时刻?通勤路上想快速刷几条微博,却被开屏广告耽误了上车时间&am…...

SWF逆向工程标准化文档:JPEXS Free Flash Decompiler实施指南
SWF逆向工程标准化文档:JPEXS Free Flash Decompiler实施指南 【免费下载链接】jpexs-decompiler JPEXS Free Flash Decompiler 项目地址: https://gitcode.com/gh_mirrors/jp/jpexs-decompiler JPEXS Free Flash Decompiler是一款强大的SWF逆向工程工具&…...

Win10下mitie安装失败:subprocess.CalledProcessError的深度排查与实战修复
1. 问题现象与初步分析 最近在Windows10系统上折腾MITIE这个自然语言处理工具包时,遇到了一个让人头疼的错误。当时按照常规流程,先下载了mitie的源码压缩包,解压后执行python setup.py install,结果命令行突然弹出一堆红色报错&a…...

实用扩散模型完整指南:100行代码实现高效图像生成
实用扩散模型完整指南:100行代码实现高效图像生成 【免费下载链接】Diffusion-Models-pytorch Pytorch implementation of Diffusion Models (https://arxiv.org/pdf/2006.11239.pdf) 项目地址: https://gitcode.com/gh_mirrors/di/Diffusion-Models-pytorch …...
)
VS Code终端切换全攻略:从PowerShell到CMD的保姆级教程(含常见问题解决)
VS Code终端切换全攻略:从PowerShell到CMD的保姆级教程(含常见问题解决) 在开发者的日常工作中,终端是不可或缺的工具。VS Code作为最受欢迎的代码编辑器之一,其内置终端功能强大且高度可定制。然而,许多开…...

开源编解码工具技术选型与实战指南:跨场景应用的H.264解决方案
开源编解码工具技术选型与实战指南:跨场景应用的H.264解决方案 【免费下载链接】openh264 Open Source H.264 Codec 项目地址: https://gitcode.com/gh_mirrors/op/openh264 一、价值定位:为什么开源编解码工具是技术选型的最优解 在视频技术快…...

如何选择适合的单北斗变形监测一体机以提升基础设施安全?
本文将重点讨论如何选择适合的单北斗变形监测一体机,以增强基础设施的安全性。在当前基础设施建设快速发展的背景下,单北斗GNSS的应用显得尤为重要。通过深入理解单北斗变形监测的原理,用户能够更好地把握设备的核心优势,尤其是在…...
优化你的开放世界游戏性能)
告别卡顿!用UE5关卡流送(Level Streaming)优化你的开放世界游戏性能
告别卡顿!用UE5关卡流送(Level Streaming)优化你的开放世界游戏性能 当玩家在广袤的开放世界中自由探索时,没有什么比突然的加载卡顿或帧率骤降更能破坏沉浸感了。作为UE5开发者,我们常常面临一个两难选择:…...

开源动作捕捉新纪元:FreeMoCap低成本解决方案全解析
开源动作捕捉新纪元:FreeMoCap低成本解决方案全解析 【免费下载链接】freemocap Free Motion Capture for Everyone 💀✨ 项目地址: https://gitcode.com/GitHub_Trending/fr/freemocap 问题:动作捕捉技术的高门槛困境 在数字内容创作…...