AI模型部署 | onnxruntime部署YOLOv8分割模型详细教程
本文首发于公众号【DeepDriving】,欢迎关注。
0. 引言
我之前写的文章《基于YOLOv8分割模型实现垃圾识别》介绍了如何使用YOLOv8分割模型来实现垃圾识别,主要是介绍如何用自定义的数据集来训练YOLOv8分割模型。那么训练好的模型该如何部署呢?YOLOv8分割模型相比检测模型多了一个实例分割的分支,部署的时候还需要做一些后处理操作才能得到分割结果。
本文将详细介绍如何使用onnxruntime框架来部署YOLOv8分割模型,为了方便理解,代码采用Python实现。
1. 准备工作
-
安装onnxruntime
onnxruntime分为GPU版本和CPU版本,均可以通过pip直接安装:pip install onnxruntime-gpu #安装GPU版本pip install onnxruntime #安装CPU版本注意:
GPU版本和CPU版本建议只选其中一个安装,否则默认会使用CPU版本。 -
下载
YOLOv8分割模型权重Ultralytics官方提供了用COCO数据集训练的模型权重,我们可以直接从官方网站https://docs.ultralytics.com/tasks/segment/下载使用,本文使用的模型为yolov8m-seg.pt。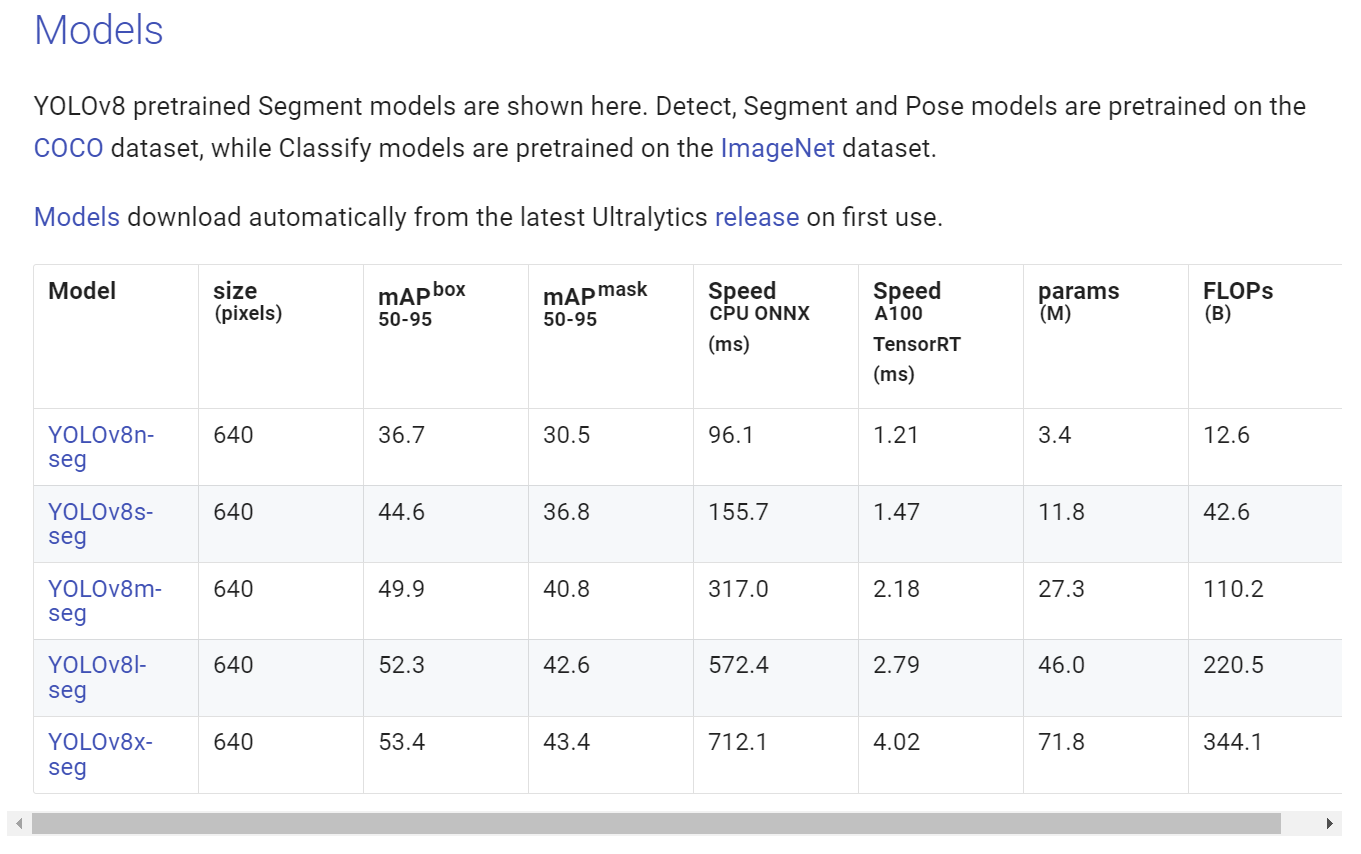
-
转换onnx模型
调用下面的命令可以把
YOLOv8m-seg.pt模型转换为onnx格式的模型:yolo task=segment mode=export model=yolov8m-seg.pt format=onnx转换成功后得到的模型为
yolov8m-seg.onnx。
2. 模型部署
2.1 加载onnx模型
首先导入onnxruntime包,然后调用其API加载模型即可:
import onnxruntime as ortsession = ort.InferenceSession("yolov8m-seg.onnx", providers=["CUDAExecutionProvider"])
因为我使用的是GPU版本的onnxruntime,所以providers参数设置的是"CUDAExecutionProvider";如果是CPU版本,则需设置为"CPUExecutionProvider"。
模型加载成功后,我们可以查看一下模型的输入、输出层的属性:
for input in session.get_inputs():print("input name: ", input.name)print("input shape: ", input.shape)print("input type: ", input.type)for output in session.get_outputs():print("output name: ", output.name)print("output shape: ", output.shape)print("output type: ", output.type)
结果如下:
input name: images
input shape: [1, 3, 640, 640]
input type: tensor(float)
output name: output0
output shape: [1, 116, 8400]
output type: tensor(float)
output name: output1
output shape: [1, 32, 160, 160]
output type: tensor(float)
从上面的打印信息可以知道,模型有一个尺寸为[1, 3, 640, 640]的输入层和两个尺寸分别为[1, 116, 8400]和[1, 32, 160, 160]的输出层。
2.2 数据预处理
数据预处理采用OpenCV和Numpy实现,首先导入这两个包
import cv2
import numpy as np
用OpenCV读取图片后,把数据按照YOLOv8的要求做预处理
image = cv2.imread("soccer.jpg")
image_height, image_width, _ = image.shape
input_tensor = prepare_input(image, model_width, model_height)
print("input_tensor shape: ", input_tensor.shape)
其中预处理函数prepare_input的实现如下:
def prepare_input(bgr_image, width, height):image = cv2.cvtColor(bgr_image, cv2.COLOR_BGR2RGB)image = cv2.resize(image, (width, height)).astype(np.float32)image = image / 255.0image = np.transpose(image, (2, 0, 1))input_tensor = np.expand_dims(image, axis=0)return input_tensor
处理流程如下:
1. 把OpenCV读取的BGR格式的图片转换为RGB格式;
2. 把图片resize到模型输入尺寸640x640;
3. 对像素值除以255做归一化操作;
4. 把图像数据的通道顺序由HWC调整为CHW;
5. 扩展数据维度,将数据的维度调整为NCHW。
经过预处理后,输入数据input_tensor的维度变为[1, 3, 640, 640],与模型的输入尺寸一致。
2.3 模型推理
输入数据准备好以后,就可以送入模型进行推理:
outputs = session.run(None, {session.get_inputs()[0].name: input_tensor})
前面我们打印了模型的输入输出属性,可以知道模型有两个输出分支,其中一个output0是目标检测分支,另一个output1则是实例分割分支,这里打印一下它们的尺寸看一下
#squeeze函数是用于删除shape中为1的维度,对output0做transpose操作是为了方便后续操作
output0 = np.squeeze(outputs[0]).transpose()
output1 = np.squeeze(outputs[1])
print("output0 shape:", output0.shape)
print("output1 shape:", output1.shape)
结果如下:
output0 shape: (8400, 116)
output1 shape: (32, 160, 160)
处理后目标检测分支的维度为[8400, 116],表示模型总共可以检测出8400个目标(大部分是无效的目标),每个目标包含116个参数。刚接触YOLOv8分割模型的时候可能会对116这个数字感到困惑,这里有必要解释一下:每个目标的参数包含4个坐标属性(x,y,w,h)、80个类别置信度和32个实例分割参数,所以总共是116个参数。实例分割分支的维度为[32, 160, 160],其中第一个维度32与目标检测分支中的32个实例分割参数对应,后面两个维度则由模型输入的宽和高除以4得到,本文所用的模型输入宽和高都是640,所以这两个维度都是160。
2.4 后处理
首先把目标检测分支输出的数据分为两个部分,把实例分割相关的参数从中剥离。
boxes = output0[:, 0:84]
masks = output0[:, 84:]
print("boxes shape:", boxes.shape)
print("masks shape:", masks.shape)
boxes shape: (8400, 84)
masks shape: (8400, 32)
然后实例分割这部分数据masks要与模型的另外一个分支输出的数据output1做矩阵乘法操作,在这之前要把output1的维度变换为二维。
output1 = output1.reshape(output1.shape[0], -1)
masks = masks @ output1
print("masks shape:", masks.shape)
masks shape: (8400, 25600)
做完矩阵乘法后,就得到了8400个目标对应的实例分割掩码数据masks,可以把它与目标检测的结果boxes拼接到一起。
detections = np.hstack([boxes, masks])
print("detections shape:", detections.shape)
detections shape: (8400, 25684)
到这里读者应该就能理解清楚了,YOLOv8模型总共可以检测出8400个目标,每个目标的参数包含4个坐标属性(x,y,w,h)、80个类别置信度和一个160x160=25600大小的实例分割掩码。
由于YOLOv8模型检测出的8400个目标中有大量的无效目标,所以先要通过置信度过滤去除置信度低于阈值的目标,对于满足置信度满足要求的目标还需要通过非极大值抑制(NMS)操作去除重复的目标。
objects = []
for row in detections:prob = row[4:84].max()if prob < 0.5:continueclass_id = row[4:84].argmax()label = COCO_CLASSES[class_id]xc, yc, w, h = row[:4]// 把x1, y1, x2, y2的坐标恢复到原始图像坐标x1 = (xc - w / 2) / model_width * image_widthy1 = (yc - h / 2) / model_height * image_heightx2 = (xc + w / 2) / model_width * image_widthy2 = (yc + h / 2) / model_height * image_height// 获取实例分割maskmask = get_mask(row[84:25684], (x1, y1, x2, y2), image_width, image_height)// 从mask中提取轮廓polygon = get_polygon(mask, x1, y1)objects.append([x1, y1, x2, y2, label, prob, polygon, mask])// NMS
objects.sort(key=lambda x: x[5], reverse=True)
results = []
while len(objects) > 0:results.append(objects[0])objects = [object for object in objects if iou(object, objects[0]) < 0.5]
这里重点讲一下获取实例分割掩码的过程。
前面说了每个目标对应的实例分割掩码数据大小为160x160,但是这个尺寸是对应整幅图的掩码。对于单个目标来说,还要从这个160x160的掩码中去截取属于自己的掩码,截取的范围由目标的box决定。上面的代码得到的box是相对于原始图像大小,截取掩码的时候需要把box的坐标转换到相对于160x160的大小,截取完后再把这个掩码的尺寸调整回相对于原始图像大小。截取到box大小的数据后,还需要对数据做sigmoid操作把数值变换到0到1的范围内,也就是求这个box范围内的每个像素属于这个目标的置信度。最后通过阈值操作,置信度大于0.5的像素被当做目标,否则被认为是背景。
具体实现的代码如下:
def get_mask(row, box, img_width, img_height):mask = row.reshape(160, 160)x1, y1, x2, y2 = box// box坐标是相对于原始图像大小,需转换到相对于160*160的大小mask_x1 = round(x1 / img_width * 160)mask_y1 = round(y1 / img_height * 160)mask_x2 = round(x2 / img_width * 160)mask_y2 = round(y2 / img_height * 160)mask = mask[mask_y1:mask_y2, mask_x1:mask_x2]mask = sigmoid(mask)// 把mask的尺寸调整到相对于原始图像大小mask = cv2.resize(mask, (round(x2 - x1), round(y2 - y1)))mask = (mask > 0.5).astype("uint8") * 255return mask
这里需要注意的是,160x160是相对于模型输入尺寸为640x640来的,如果模型输入是其他尺寸,那么上面的代码需要做相应的调整。
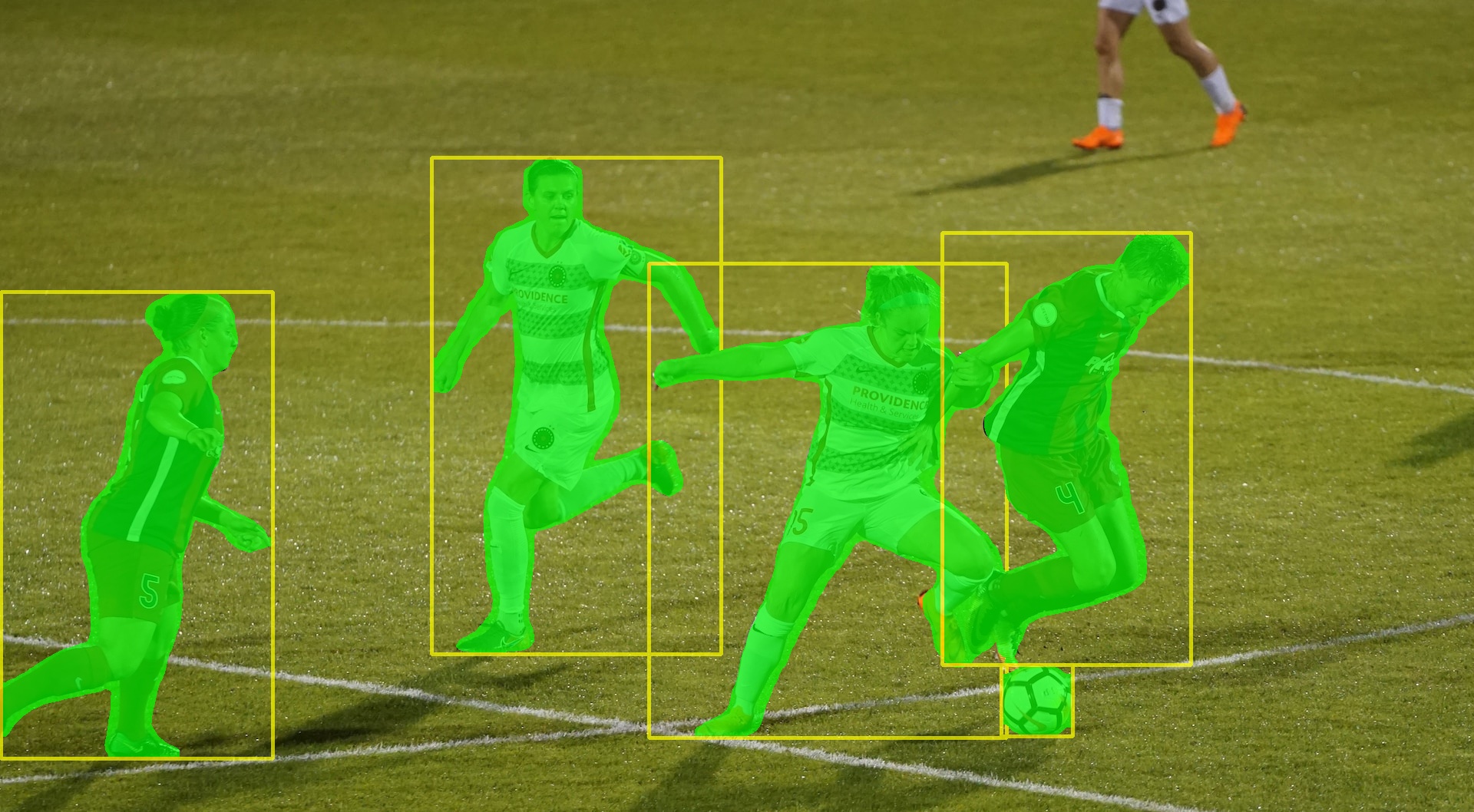
如果需要检测的是下面这个图片:

通过上面的代码可以得到最左边那个人的分割掩码为

但是我们需要的并不是这样一张图片,而是需要用于表示这个目标的轮廓,这可以通过OpenCV的findContours函数来实现。findContours函数返回的是一个用于表示该目标的点集,然后我们可以在原始图像中用fillPoly函数画出该目标的分割结果。

全部目标的检测与分割结果如下:
3. 一点其他的想法
从前面的部署过程可以知道,做后处理的时候需要对实例分割的数据做矩阵乘法、sigmoid激活、维度变换等操作,实际上这些操作也可以在导出模型的时候集成到onnx模型中去,这样就可以简化后处理操作。
首先需要修改ultralytics代码仓库中ultralytics/nn/modules/head.py文件的代码,把Segment类Forward函数最后的代码修改为:
if self.export:output1 = p.reshape(p.shape[0], p.shape[1], -1)boxes = x.permute(0, 2, 1)masks = torch.sigmoid(mc.permute(0, 2, 1) @ output1)out = torch.cat([boxes, masks], dim=2)return out
else:return (torch.cat([x[0], mc], 1), (x[1], mc, p))
然后修改ultralytics/engine/exporter.py文件中torch.onnx.export的参数,把模型的输出数量改为1个。

代码修改完成后,执行命令pip install -e '.[dev]'使之生效,然后再重新用yolo命令导出模型。用netron工具可以看到模型只有一个shape为[1,8400,25684]的输出。
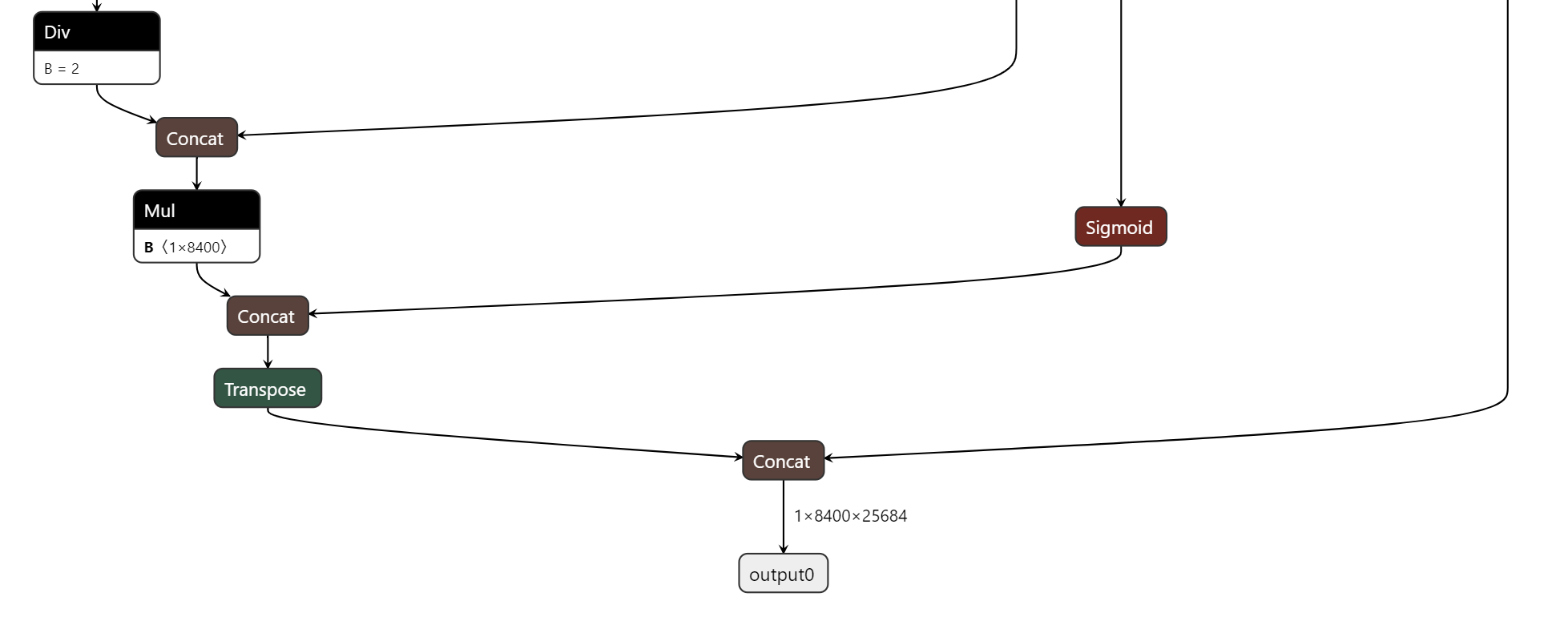
这样在后处理的时候就可以直接去解析box和mask了,并且mask的数据不需要进行sigmoid激活。
4. 参考资料
- How to implement instance segmentation using YOLOv8 neural network
- https://github.com/AndreyGermanov/yolov8_segmentation_python
相关文章:
AI模型部署 | onnxruntime部署YOLOv8分割模型详细教程
本文首发于公众号【DeepDriving】,欢迎关注。 0. 引言 我之前写的文章《基于YOLOv8分割模型实现垃圾识别》介绍了如何使用YOLOv8分割模型来实现垃圾识别,主要是介绍如何用自定义的数据集来训练YOLOv8分割模型。那么训练好的模型该如何部署呢?…...

模拟电路学习笔记(一)之芯片篇(持续更新)
模拟电路学习笔记(一)之芯片篇(持续更新) 1.CD4047BE芯片 CD4047是一种包含高电压的多谐振荡器,该器件的操作可以在两种模式下完成,分别是单稳态和非稳态。CD4047需要一个外部电阻器和电容器来决定单稳态…...

如何利用CentOS7+docker+jenkins+gitee部署springboot+vue前后端项目(保姆教程)
博主介绍:Java领域优质创作者,博客之星城市赛道TOP20、专注于前端流行技术框架、Java后端技术领域、项目实战运维以及GIS地理信息领域。 🍅文末获取源码下载地址🍅 👇🏻 精彩专栏推荐订阅👇🏻…...

qt 5.15.2 主窗体事件及绘制功能
qt 5.15.2 主窗体事件及绘制功能 显示主窗体效果图如下所示: main.cpp #include "mainwindow.h"#include <QApplication>int main(int argc, char *argv[]) {QApplication a(argc, argv);MainWindow w;w.setFixedWidth(600);w.setFixedHeight(6…...

(2)(2.4) TerraRanger Tower/Tower EVO(360度)
文章目录 前言 1 安装传感器并连接 2 通过地面站进行配置 3 参数说明 前言 TeraRanger Tower 可用于在 Loiter 和 AltHold 模式下进行目标规避。传感器的最大可用距离约为 4.5m。 TeraRanger Tower EVO 可用于在 Loiter 和 AltHold 模式下进行目标规避。传感器的最大可用…...

Redis_主从复制、哨兵模式、集群模式详解
Redis的主从复制 为什么Redis要引入主从复制?what? 在这里博主为小伙伴们简单的做下解释,可以了解一下 实际生产环境下,单机的redis服务器是无法满足实际的生产需求的。 第一,单机的redis服务器很容易发生单点故障&am…...
关于神舟-战神TA5NS系统重装问题
加装固态卡在log处无法开机问题 下面是我的步骤 1.按f7选择pe安装系统,然后发现卡在战神log处不转动 2.下载驱动 TA5NS驱动地址 下载RAID驱动(如果没有私信我,我网盘里有),拷到u盘中,然后进入pe系统里面…...
前端大文件上传webuploader(react + umi)
使用WebUploader还可以批量上传文件、支持缩略图等等众多参数选项可设置,以及多个事件方法可调用,你可以随心所欲的定制你要的上传组件。 分片上传 1.什么是分片上传 分片上传,就是将所要上传的文件,按照一定的大小,将…...
数据库常用sql命令)
人大金仓(kingbase)数据库常用sql命令
一. 字段 1. 添加 alter table book add column book_id varchar not null, book_title varchar(10) default ;2. 删除 alter table book drop book_id, book_title;// 外键时 alter table book drop book_id, book_title cascade;3. 修改类型 alter table book alter colu…...
HashMap相关专题
前置知识:异或运算 异或运算介绍 异或有什么神奇之处(应用)? (1)快速比较两个值 (2)我们可以使用异或来使某些特定的位翻转,因为不管是0或者是1与1做异或将得到原值的相…...

threejs WebGLRenderer 像素比对画布大小的影响
官方文档 - WebGLRenderer .setPixelRatio ( value : number ) : undefined 设置设备像素比。通常用于避免HiDPI设备上绘图模糊 .setSize ( width : Integer, height : Integer, updateStyle : Boolean ) : undefined 将输出canvas的大小调整为(width, height)并考虑设备像素比…...
 与 RocketMQTemplate.syncSend() 方法详解)
RocketMQTemplate.send() 与 RocketMQTemplate.syncSend() 方法详解
Apache RocketMQ 是一款强大的分布式消息中间件,与 Spring Boot 集成后,通过 RocketMQTemplate 提供了多种方法来发送消息。其中,send() 和 syncSend() 是两个常用的发送消息方法,本文将深入探讨它们的区别以及详细解释这两个方法…...

波奇学C++:类型转换和IO流
隐式类型转换 int i0; double pi; 强制类型转换 int* pnullptr; int a(int)p; 单参数构造函数支持隐式类型转换 class A { public:A(string a):_a(a){} private:string _a; }; A a("xxxx"); //"xxx" const char* 隐式转换为string 多参数也可以通过{…...
集成开发环境 PyCharm 的安装【侯小啾python基础领航计划 系列(二)】
集成开发环境PyCharm的安装【侯小啾python基础领航计划 系列(二)】 大家好,我是博主侯小啾, 🌹꧔ꦿ🌹꧔ꦿ🌹꧔ꦿ🌹꧔ꦿ🌹꧔ꦿ🌹꧔ꦿ🌹꧔ꦿ🌹꧔ꦿ🌹꧔ꦿ🌹꧔ꦿ🌹꧔ꦿ🌹꧔ꦿ🌹꧔ꦿ🌹꧔ꦿ🌹꧔ꦿ🌹꧔ꦿ🌹꧔ꦿ🌹꧔ꦿ🌹꧔ꦿ🌹꧔ꦿ🌹꧔…...
Java核心知识点整理大全27-笔记(已完结)
目录 30. 云计算 30.1.1. SaaS 30.1.2. PaaS 30.1.3. IaaS 30.1.4. Docker 30.1.4.1. 概念 30.1.4.2. Namespaces 30.1.4.3. 进程(CLONE_NEWPID 实现的进程隔离) 30.1.4.4. Libnetwork 与网络隔离 30.1.4.5. 资源隔离与 CGroups 30.1.4.6. 镜像与 UnionFS 30.1.4.7.…...

1. 使用poll或epoll创建echo服务器
1. 说明: 此篇博客主要记录一种客户端实现方式,和两种使用poll或者epoll分别创建echo服务器的方式,具体可看代码注释: 2. 相关代码: 2.1 echoClient.cpp #include <iostream> #include <cstdio> #incl…...

【对象数组根据属性排序】
// sort使用的排序方法 // 传入对象数组用于排序的对象的属性,升序/降序 function compare(property, sortType "asc") {debugger// 如果不是 asc,desc,不做下一步比较if (!(sortType "desc" || sortType "asc")) {return;}return function (…...
BACnet I/O模块:楼宇自动化的未来选择
在楼宇自动化领域,BACnet通信协议在确保设备之间无缝高效的数据交换方面发挥着至关重要的作用。该领域使用广泛的协议是BACnet。它使传感器、执行器和控制器等设备能够相互通信,从而促进工业过程的自动化。 BACNET介绍 BACnet是专门为楼宇自动化和控制系…...

android项目实战之使用框架 集成多图片、视频的上传
效果图 实现方式,本功能使用PictureSelector 第三方库 。作者项目地址:https://github.com/LuckSiege/PictureSelector 1. builder.gradle 增加 implementation io.github.lucksiege:pictureselector:v3.11.1implementation com.tbruyelle.rxpermissio…...

MyBatis查询优化:枚举在条件构建中的妙用
🚀 作者主页: 有来技术 🔥 开源项目: youlai-mall 🍃 vue3-element-admin 🍃 youlai-boot 🌺 仓库主页: Gitee 💫 Github 💫 GitCode 💖 欢迎点赞…...

Arduino开发板选型指南:从性能、接口到场景化决策
1. 项目概述:为什么Arduino选型是个技术活刚接触Arduino或者准备开始一个新项目时,面对琳琅满目的开发板型号,你是不是也感到过一丝迷茫?从经典的Uno到功能强大的Mega,再到小巧玲珑的Micro和专为可穿戴设计的Flora&…...

Airbyte线程管理:10个提升数据同步效率的并发处理优化技巧
Airbyte线程管理:10个提升数据同步效率的并发处理优化技巧 【免费下载链接】airbyte Open-source data movement for ELT pipelines and AI agents — from APIs, databases & files to warehouses, lakes, and AI applications. Both self-hosted and Cloud. …...

Perseus:碧蓝航线皮肤解锁补丁的完整使用指南
Perseus:碧蓝航线皮肤解锁补丁的完整使用指南 【免费下载链接】Perseus Azur Lane scripts patcher. 项目地址: https://gitcode.com/gh_mirrors/pers/Perseus 你是否曾经在《碧蓝航线》中看到心仪的舰船皮肤,却因为需要付费而望而却步࿱…...

Speedracer性能基准测试框架设计与实现:终极JavaScript性能测试指南
Speedracer性能基准测试框架设计与实现:终极JavaScript性能测试指南 【免费下载链接】speedracer Collect performance metrics for your library/application. 项目地址: https://gitcode.com/gh_mirrors/sp/speedracer Speedracer是一个专门为JavaScript库…...

SwarmVault:去中心化AI数据存储与管理的实践指南
1. 项目概述与核心价值最近在探索分布式存储和AI应用结合的前沿领域时,我遇到了一个非常有意思的项目:swarmclawai/swarmvault。这个名字本身就透露了它的野心——将去中心化存储网络Swarm与人工智能(AI)能力相结合,构…...

基于SSH与rsync构建跨平台远程开发环境:remote2mac实战指南
1. 项目概述与核心价值最近在折腾跨平台开发环境,特别是需要在Windows或Linux机器上,无缝地操作和编译运行macOS上的代码。如果你也遇到过类似场景——比如主力开发机是Windows笔记本,但项目最终部署或测试环境是macOS服务器;或者…...

开源监控工具Argus:轻量级实时监控与告警系统实践指南
1. 项目概述:一个专注于实时监控与告警的开源利器最近在梳理团队内部的监控告警体系时,我又重新审视了市面上的一些开源方案。除了大家耳熟能详的PrometheusGrafanaAlertmanager组合,一个名为argus的项目引起了我的注意。这个由tmdgusya维护的…...

基于语义搜索与向量数据库的AI工具发现引擎Lyra架构与实践
1. 项目概述与核心价值最近在折腾一个AI驱动的工具发现平台,核心是解决一个很实际的问题:面对市面上成千上万、层出不穷的AI工具和开源项目,我们如何高效地找到真正适合自己需求的那一个?不是简单地罗列清单,而是能理解…...

基于RAG的代码语义搜索:用自然语言对话你的Git仓库
1. 项目概述:当代码库遇上对话式AI如果你是一名开发者,每天都要和Git仓库打交道,那么你一定遇到过这样的场景:面对一个庞大或陌生的代码库,想快速了解某个功能的实现逻辑,或者想找到一段特定的代码…...

AI智能体框架选型指南:从LangChain到AutoGen的实战解析
1. 项目概述:为什么我们需要一个“智能体框架”导航站?最近几年,如果你关注AI领域,尤其是大语言模型的应用开发,一定会被一个词频繁刷屏:Agent(智能体)。它不再是科幻电影里的概念&a…...