关于.bashrc和setup.bash的理解
在创建了ROS的workspace后,需要将workspace中的setup.bash文件写入~/.bashrc 文件中,让其启动:
source /opt/ros/melodic/setup.bash
这句话的目的就是在开新的terminal的时候,运行这个setup.bash,而这个setup.bash的作用是让一些ROS* 开头的命令可以使用。
在工作空间的devel文件夹中存在几个setup.*sh形式的环境变量设置脚本。使用source命令运行这些脚本文件,则工作空间的环境变量设置可以生效(如可以找到该工作空间内的项目)。
source devel/setup.bash
也就是说要运行自己的一个代码,就要source下这个:source devel/setup.bash
当然也可以把他加入到.bashrc中,这样就不用每次都source自己的程序了(对应下面第二行)


上面两个图就是对应关系
.bashrc
是home目录下的一个shell文件,用于储存用户的个性化设置。
.bashrc在每次打开新的终端时都会被读取,所以我们在运行ROS的某些代码的时候,
可以使用export设置环境变量
export <环境变量名>=<值>上面的命令会覆盖掉环境变量原有值,如果想给同一个环境变量赋予多个值,需要借助以下语法
export THEPATH=$THEPATH:</path>
eg:export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/gzy/catkin_ws/src/ORB_SLAM2/Examples/ROS你对 .bashrc 所做的任何修改将在下一次启动终端时生效。如果你想立刻生效的话,运行下面的命令:
source ~/.bashrc如果用户删除了.bashrc,可以从如下路径拷贝一份原始的.bashrc文件到用户home目录下
cp /etc/skel/.bashrc ~/setup.bash
创建了ROS 的workspace之后,需要将workspace中的setup.bash文件写入~/.bashrc 文件中,让
其启动,就像这个样子:
source /opt/ros/kinetic/setup.bash这句的目的就是在开新的terminal的时候,运行这个setup.bash,而这个setup.bash的作用是让一些ROS* 开头的命令可以使用。同时还能够创建一些ROS开头的环境变量,比如:
ROS_PACKAGE_PATH 我们可以在终端输入echo $ROS_PACKAGE_PATH来查看变量的值
当你使用rospack find {packagename}这个语句搜索路径的时候,就会在它会依据ROS_PACKAGE_PATH 所提供的功能包路径里去寻找,不在这个环境变量里的路径就不会去寻找了,即便你有这个功能包,也会显示找不到。
同理当我们rosrun某个包的时候,也需要对应代码所在的工作环境的路径在ROS_PACKAGE_PATH当中。
参考:ROS 中setup.bash_robinhjwy的博客-CSDN博客
ROS中的setup.bash_泠山的博客-CSDN博客
相关文章:
关于.bashrc和setup.bash的理解
在创建了ROS的workspace后,需要将workspace中的setup.bash文件写入~/.bashrc 文件中,让其启动: source /opt/ros/melodic/setup.bash这句话的目的就是在开新的terminal的时候,运行这个setup.bash,而这个setup.bash的作…...
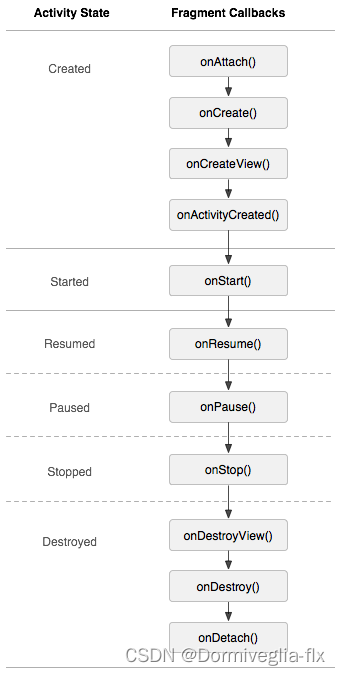
03 Android基础--fragment
03 Android基础--fragment什么是fragment?fragment生命周期?动态的fragment与静态的fragmentfragment常用的两个类与APIFragment与Activity通信什么是fragment? 碎片,一个activity中可以使用多个fragment,可以把activi…...
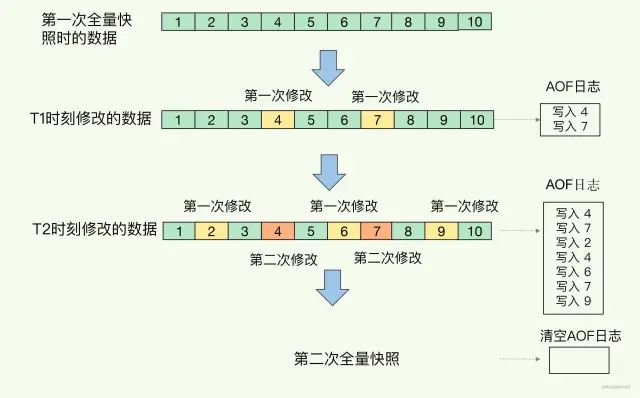
Redis使用,AOF、RDB
前言 如果有人问你:"你会把 Redis 用在什么业务场景下?" 我想你大概率会说:"我会把它当作缓存使用,因为它把后端数据库中的数据存储在内存中,然后直接从内存中读取数据,响应速度会非常快。…...
SOLIDWORKS Premium 2023 SP1.0 三维设计绘图软件
SOLIDWORKS 中文完美正式版提供广泛工具来处理最复杂的问题,并提供深层技术完成关键细节工作。新功能可助您改善产品开发流程,以更快地将创新产品投入生产。Solidworks 是达索公司最新推出的三维CAD系统,它可让设计师大大缩短产品的设计时间,让产品得以快速、高效地投向市场…...

PyQGIS开发--自动化地图布局案例
前言创建地图布局是 GIS 作业结束时的一项常见任务。 它用于呈现最终结果的输出,作为与用户交流的一种方式,以便从地图中获取信息、知识或见解。 在包括 QGIS 在内的任何 GIS 软件中制作地图布局都非常容易。 但另一方面,当我们必须生成如此大…...

严格模式和非严格模式下的this指向问题
一、全局环境 1.函数调用 非严格模式:this指向是Window // 普通函数 function fn () { console.log(this, this); } fn() // 自执行函数 (function fn () { console.log(this, this); })() 严格模式:this指向是undefined //…...

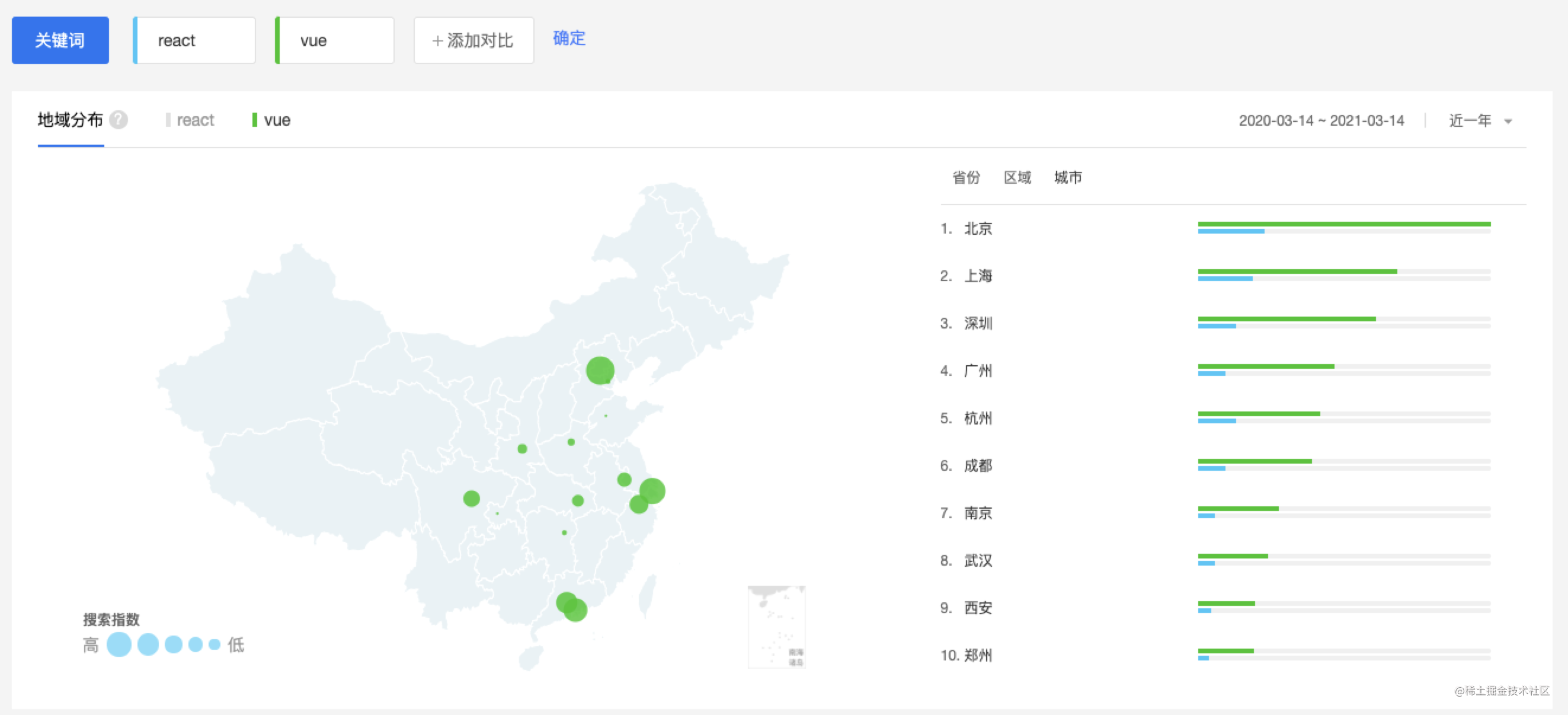
vue2、vue3组件传值,引用类型,对象数组如何处理
vue2、vue3组件传值,引用类型,对象数组如何处理 Excerpt 所有的 prop 都使得其父子 prop 之间形成了一个单向下行绑定:父级 prop 的更新会向下流动到子组件中,但是反过来则不行。这样会防止从子组件意外变更父… 下述组件传值指引…...

165. 小猫爬山
Powered by:NEFU AB-IN Link 文章目录165. 小猫爬山题意思路代码165. 小猫爬山 题意 翰翰和达达饲养了 N只小猫,这天,小猫们要去爬山。 经历了千辛万苦,小猫们终于爬上了山顶,但是疲倦的它们再也不想徒步走下山了(呜咕…...

ECharts教程(详细)
ECharts教程(详细) 非常全面的ECharts教程,非常全面的ECharts教程,目前线条/节点颜色、线条粗细、线条样式、线条阴影、线条平滑、线条节点大小、线条节点阴影、线条节点边框、线条节点边框阴影、工具提醒、工具提醒样式、工具自定义提醒、工具提醒背景…...

pinia
目录一、介绍二、快速上手1.安装2.基本使用与state3.actions的使用4.getters的使用5.storeToRefs的使用6.pinia模块化三、数据持久化1.安装2.使用插件3.模块开启持久化4.按需缓存模块的数据一、介绍 pinia从使用角度和之前Vuex几乎是一样的,比Vuex更简单了。 在Vu…...

mysql中insert语句的五种用法
文章目录前言一、values参数后单行插入二、values参数后多行插入三、搭配select插入数据四、复制旧表的信息到新表五、搭配set插入数据总结前言 insert语句是标准sql中的语法,是插入数据的意思。在实际应用中,它也演变了很多种用法来实现特殊的功能&…...

YOLOV7模型调试记录
先前的YOLOv7模型是pytorch重构的,并非官方提供的源码,而在博主使用自己的数据集进行实验时发现效果并不理想,因此生怕是由于源码重构导致该问题,此外还需进行对比实验,因此便从官网上下载了源码,进行调试运…...
)
模拟光伏不确定性——拉丁超立方抽样生成及缩减场景(Matlab全代码)
光伏出力的不确定性主要源于预测误差,而研究表明预测误差(e)服从正态分布且大概为预测出力的10%。本代码采用拉丁超立方抽样实现场景生成[1,2]、基于概率距离的快速前代消除法实现场景缩减[3],以此模拟了光伏出力的不确定性。与风电不确定性模拟不同之处在于——光伏存在0出…...

Elasticsearch聚合查询速览
Es 数据分析工具 - Elasticsearch Aggregations (聚合查询) 官方文档 Aggregations | Elasticsearch Guide [7.15] | Elastic 1. Bucket aggregations 桶聚合 that group documents into buckets, also called bins, based on field values, ranges, o…...

CEC2017:鱼鹰优化算法(Osprey optimization algorithm,OOA)求解cec2017(提供MATLAB代码)
一、鱼鹰优化算法简介 鱼鹰优化算法(Osprey optimization algorithm,OOA)由Mohammad Dehghani 和 Pavel Trojovsk于2023年提出,其模拟鱼鹰的捕食行为。 鱼鹰是鹰形目、鹗科、鹗属的仅有的一种中型猛禽。雌雄相似。体长51-64厘米…...
Vue3 企业级项目实战:通关 Vue3 企业级项目开发,升职加薪快人一步
Vue3 企业级项目实战 - 程序员十三 - 掘金小册Vue3 Element Plus Spring Boot 企业级项目开发,升职加薪,快人一步。。「Vue3 企业级项目实战」由程序员十三撰写,2744人购买https://s.juejin.cn/ds/S2RkR9F/ 课程介绍 很高兴为大家介绍这个…...

vue样式绑定(v-if)
文章目录一.第一次用vue框架二.要求:1.定义两种样式,一种描述正确的状态,一种描述错误的状态。2.在结构代码中定义一个块,实现绑定正确的样式状态。3.定义一个按钮,实现正确和错误两种状态的class切换。三.源代码四.效果一.第一次…...

无需公网IP,安全稳定实现U8C异地访问
用友是全球领先的企业云服务与软件提供商,在财务、人力、供应链、采购、制造、营销、研发、项目、资产、协同等领域为客户提供数字化、智能化、社会化的企业云服务产品与解决方案。 U8C是用友针对成长型、创新型企业,提供企业级ERP整体解决方案。在系统…...

Graph Neural Network(GNN)图神经网络
Graph Neural Network(GNN)图神经网络,是一种旨在对图结构数据就行操作的深度学习算法。它可以很自然地表示现实世界中的很多问题,包括社交网络,分子结构和交通网络等。GNN旨在处理此类图结构数据,并对图中的节点和边进行预测或执…...

JSTL核心库的简单使用
JSTL核心库的简单使用 7.1考试重点 7.1.1c:out输出数据 考试重点就是c的相关的 jar包下载地址:Apache Tomcat - Apache Taglibs Downloads 看会典型应用就可以<% page contentType"text/html;charsetUTF-8" language"java" %> <% taglib uri"…...

Winhance中文版:让Windows系统管理不再复杂的全能工具
Winhance中文版:让Windows系统管理不再复杂的全能工具 【免费下载链接】Winhance-zh_CN A Chinese version of Winhance. C# application designed to optimize and customize your Windows experience. 项目地址: https://gitcode.com/gh_mirrors/wi/Winhance-zh…...

OBS Advanced Timer:全场景直播计时神器,让你的直播节奏掌控自如
OBS Advanced Timer:全场景直播计时神器,让你的直播节奏掌控自如 【免费下载链接】obs-advanced-timer 项目地址: https://gitcode.com/gh_mirrors/ob/obs-advanced-timer 作为主播,你是否曾因手动计时失误导致直播环节超时ÿ…...

如何高效使用小米手表表盘制作工具:Mi-Create完整操作指南
如何高效使用小米手表表盘制作工具:Mi-Create完整操作指南 【免费下载链接】Mi-Create Unofficial watchface creator for Xiaomi wearables ~2021 and above 项目地址: https://gitcode.com/gh_mirrors/mi/Mi-Create 想为你的小米手表或手环设计个性化表盘吗…...
中的技术路径拆解、时间节点校验与政策匹配度评分)
GLM-4-9B-Chat-1M惊艳效果:碳中和白皮书(120页)中的技术路径拆解、时间节点校验与政策匹配度评分
GLM-4-9B-Chat-1M惊艳效果:碳中和白皮书(120页)中的技术路径拆解、时间节点校验与政策匹配度评分 1. 项目背景与核心能力 今天要给大家展示一个让人眼前一亮的技术应用场景——用GLM-4-9B-Chat-1M这个本地部署的大模型,来深度分…...

小白程序员必看:大模型“语义崩塌”陷阱与收藏攻略!
本文深入解析了“语义崩塌”现象,即在大模型处理海量数据时,向量语义失去区分度导致搜索失效。以斯坦福RAG研究为例,揭示高维空间下“维度灾难”如何导致相关性计算失效,影响企业级应用。文章提出分层检索和基于图谱的检索作为解决…...

4个革新性步骤:NHSE动物森友会存档编辑器完全指南
4个革新性步骤:NHSE动物森友会存档编辑器完全指南 【免费下载链接】NHSE Animal Crossing: New Horizons save editor 项目地址: https://gitcode.com/gh_mirrors/nh/NHSE NHSE(动物森友会存档编辑器)作为一款开源免费工具,…...

从BUUCTF的Hack World靶场,聊聊那些年我们踩过的SQL注入“异或”盲注坑
从BUUCTF的Hack World靶场,聊聊那些年我们踩过的SQL注入"异或"盲注坑 在CTF竞赛的Web安全赛道上,SQL注入始终是经久不衰的考点。当新手们刚掌握联合查询和报错注入时,往往会在一道名为Hack World的题目前栽跟头——这道来自CISCN2…...

YOLOv10镜像作品集:高清图像目标检测惊艳案例分享
YOLOv10镜像作品集:高清图像目标检测惊艳案例分享 1. 引言:YOLOv10带来的视觉革命 在计算机视觉领域,目标检测技术正经历着前所未有的变革。YOLOv10作为最新一代的目标检测模型,以其无与伦比的速度和精度重新定义了实时检测的标…...

别再只查列表了!Flowable 7.x 待办任务‘状态’字段的实战设计与前端动态渲染
Flowable 7.x 待办任务状态引擎设计与前端动态交互实战 在当今企业级应用开发中,工作流引擎已成为复杂业务流程管理的核心基础设施。作为Activiti的下一代产品,Flowable 7.x在任务状态管理和前后端协同方面提供了更强大的能力。本文将深入探讨如何基于Fl…...

显卡驱动深度清理指南:用DDU解决驱动残留难题
显卡驱动深度清理指南:用DDU解决驱动残留难题 【免费下载链接】display-drivers-uninstaller Display Driver Uninstaller (DDU) a driver removal utility / cleaner utility 项目地址: https://gitcode.com/gh_mirrors/di/display-drivers-uninstaller 你是…...