自动驾驶:传感器初始标定
手眼标定
机器人手眼标定Ax=xB(eye to hand和eye in hand)及平面九点法标定
Ax = xB问题求解,旋转和平移分步求解法
手眼标定AX=XB求解方法(文献总结)
基于靶的方法
- 相机标定
(1) ApriTag
(2) 棋盘格:cv::findChessboardCorners
(3) 品字格 - 激光雷达标定
(1) 激光雷达反射板
在线标定
这里面的在线标定指相对路面的位姿估计
1.广角前视相机
(1) 基于LK稀疏光流求解H的动态标定方案
首先利用opencv::calcOpticalFlowPyrLK提取出连续两帧之间的稀疏光流
假设相机在两个不同位置拍摄同一个平面(路面)
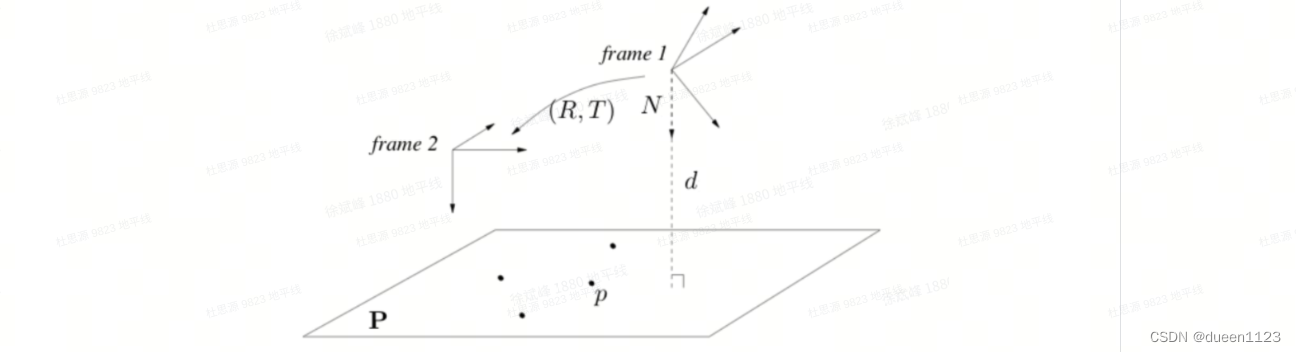
frame1中的点可以由以下公式转换到frame2中

X1表示三维坐标点,在平面P上,因此X1沿着平面法向量n的投影距离为d

进一步推导

结合公式1我们可以得到

因此我们就得到了平面的单应性矩阵

因此x2= Hx1,其中x1和x2分别是上一帧和当前帧相机坐标系下的点(x,y,1),我们可以根据x2 - Hx1构建重投影误差来优化H
那么如何由H分解出来相机与车辆的标定矩阵呢?
H是相机之间的变化Rt_cam求得的(本质上优化H也就是优化Rt_cam),然后根据车辆坐标系的移动Rt_vcs,可以计算出相机到车辆的标定Rt,如下所示

(2) 基于光流和车辆直行场景下估计yaw和pitch

首先通过光流构建前后帧特征点之间的匹配关系,然后构建极线约束求解Essential Matrix,分解E得到位移方向t的初值

利用最优化方法得到更精确的t的值,多个匹配特征点,tx和R构建sampson error优化,然后求解yaw和pitch


(3) 基于稠密光流
相关文章:
自动驾驶:传感器初始标定
手眼标定 机器人手眼标定AxxB(eye to hand和eye in hand)及平面九点法标定 Ax xB问题求解,旋转和平移分步求解法 手眼标定AXXB求解方法(文献总结) 基于靶的方法 相机标定 (1) ApriTag (2) 棋盘格:cv::f…...
如何将 MySQL 数据库转换为 SQL Server
本文解释了为什么组织希望将其 MySQL 数据库转换为 Microsoft SQL 数据库。本文接着详细介绍了尝试转换之前需要记住的事项以及所涉及的方法。专业的数据库转换器工具将帮助您快速将 MySQL 数据库记录转换为 MS SQL Server。 在继续之前,我们先讨论一下 MySQL 到 M…...

【开源】基于Vue+SpringBoot的河南软件客服系统
文末获取源码,项目编号: S 067 。 \color{red}{文末获取源码,项目编号:S067。} 文末获取源码,项目编号:S067。 目录 一、摘要1.1 项目介绍1.2 项目录屏 二、功能模块2.1 系统管理人员2.2 业务操作人员 三、…...

《算法面试宝典》--深度学习常见问题汇总
第三章 深度学习基础 3.1 基本概念 3.1.1 神经网络组成? 神经网络类型众多,其中最为重要的是多层感知机。为了详细地描述神经网络,我们先从最简单的神经网络说起。 感知机 多层感知机中的特征神经元模型称为感知机,由Frank Rosenblatt于1957年发明。 其中 x 1 x_1 x...

【计算机网络实验】实验三 IP网络规划与路由设计(头歌)
目录 一、知识点 二、实验任务 三、头歌测试 一、知识点 IP子网掩码的两种表示方法 32位IP子网掩码,特点是从高位开始连续都是1,后面是连续的0,它有以下两种表示方法: 传统表示法,如:255.255.255.0IP前…...
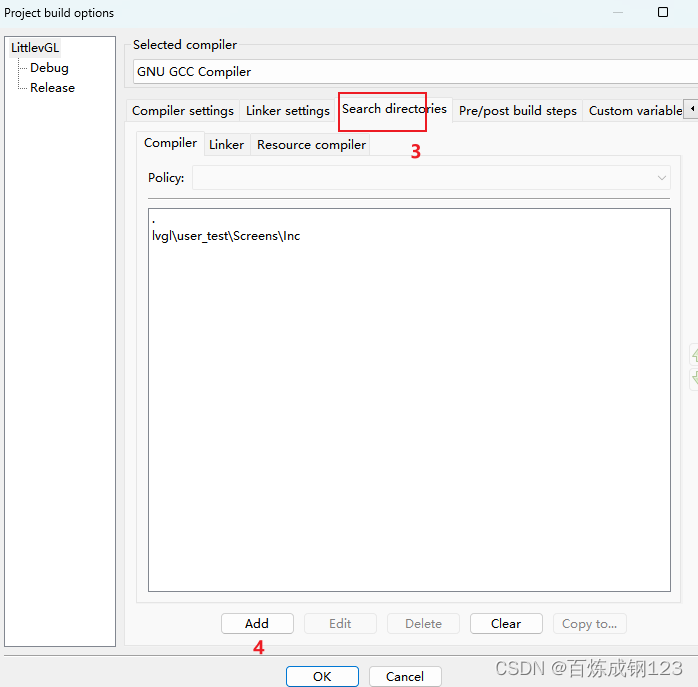
CodeBlocks添加头文件,解决fatal error: ui.h No such file or directory
问题描述 在使用codeblocks工具进行LVGL仿真过程中报错,找不到头文件 原因分析: 没有将头文件加入编辑器搜索的目录中,编译时找不到头文件。 解决方案: 将要包含的头文件的目录加进去就可以了...

鸿蒙开发:UIAbility组件与UI的数据同步-使用EventHub进行数据通信【鸿蒙专栏-21】
文章目录 ArkTS应用模型中UIAbility组件与UI的数据同步使用EventHub进行数据通信使用globalThis进行数据同步1. UIAbility和Page之间使用globalThis2. UIAbility和UIAbility之间使用globalThis3. 使用globalThis的注意事项4. 使用globalThis的注意事项同名对象覆盖导致问题的场…...

云架构的思考3--云上开发
目录 1 DevOps--简单灵活性高2 服务化(微服务)--弹性(可扩展)、按需自主服务3 无状态(Serverless)--弹性(可扩展)4 日志--安全5 配置中心--安全6 设计模式6.1 使用“适配器模式”调用…...
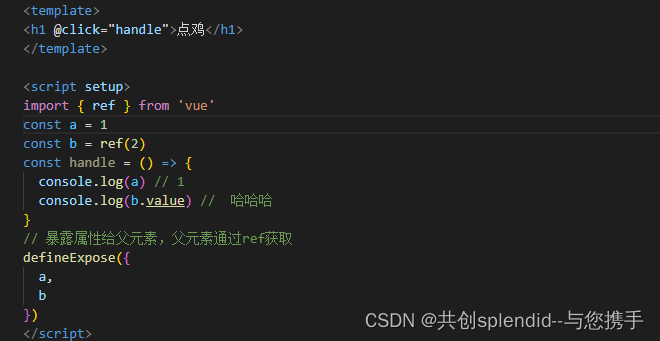
vue3日常知识点学习归纳
1,父子组件传递: 父组件传递参数 <template><div><!-- 子组件 参数:num 、nums --><child :num"nums.num" :doubleNum"nums.doubleNum" increase"handleIncrease"></child>&l…...

策略模式终极解决方案之策略机
我们在开发时经常会遇到一堆的if else …, 或者switch, 比如我们常见的全局异常处理等, 像类似这种很多if else 或者多场景模式下, 策略模式是非常受欢迎的一种设计模式, 然而, 一个好的策略模式却不是那么容易写出来. 我在工作中也因为写烦了switch,if else 觉得很不优雅, 因…...

linux 常用指令目录大纲
Linux下的Signal信号处理及详解,test ok-CSDN博客 Linux下怎样判断一个binary是否可以debug//test ok_感知算法工程师的博客-CSDN博客 linux file命令的用法//test ok-CSDN博客 linux下生成core dump方法与gdb解析core dump文件//test ok-CSDN博客 linux readel…...

webpack该如何打包
1.我们先创建一个空的大文件夹 2.打开该文件夹的终端 输入npm init -y 2.1.打开该文件夹的终端 2.2在该终端运行 npm init -y 3.安装webpack 3.1打开webpack网址 点击“中文文档” 3.2点击“指南”在点击“起步” 3.3复制基本安装图片画线的代码 4.在一开始的文件夹下在创建一…...
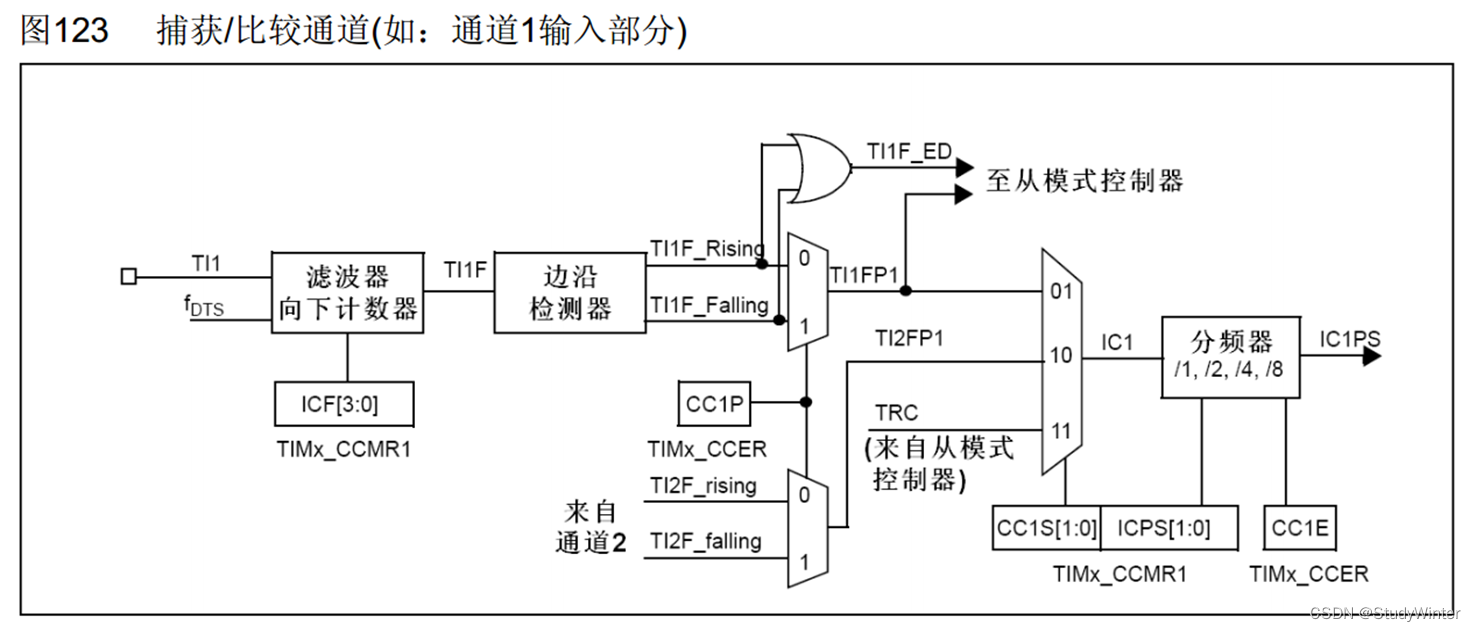
【STM32】TIM定时器输入捕获
1 输入捕获 1.1 输入捕获简介 IC(Input Capture)输入捕获 输入捕获模式下,当通道输入引脚出现指定电平跳变时(上升沿/下降沿),当前CNT的值将被锁存到CCR中(把CNT的值读出来,写入到…...

webrtc 设置不获取鼠标 启用回声消除
数 getDisplayMedia()(属于 navigator.mediaDevices 的一部分)与 getUserMedia() 类似,用于打开显示内容(或部分内容,如窗口)。返回的 MediaStream 与使用 getUserMedia() 时相同。 显示鼠标与否 getDisplayMedia() 的约束条件与常规视频或音频输入资源的限制不同。 {…...
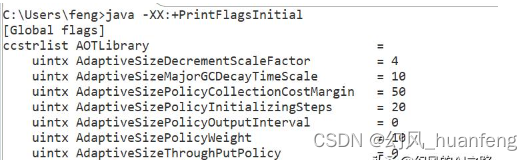
JVM虚拟机:如何查看JVM初始和最终的参数?
本文重点 在前面的课程中,我们学习了如何查看当前程序所处于的xx参数,本文再介绍一种如何参看JVM的xx参数? 查看JVM的所有初始化参数 方式一:java -XX:PrintFlagsInitial 方式二:java -XX:PrintFlagsInitial -versio…...

JVM Optimization Learning(五)
目录 一、JVM Optimization 1、G1 1、G1内存模型 2、基础概念 3、G1特点: 4、CMS日志分析 5、G1日志分析 2、GC参数 2.1、GC常用参数 2.2、Parallel常用参数 2.3、CMS常用参数 2.4、G1常用参数 一、JVM Optimization 1、G1 G1官网说明:Gar…...

Java项目学生管理系统一前后端环境搭建
在现代的软件开发中,学生管理系统是一个常见的应用场景。通过学生管理系统,学校能够方便地管理学生的信息、课程安排和成绩等数据。本文将介绍如何使用Java语言搭建一个学生管理系统的前后端环境,并提供一个简单的示例。 1.环境搭建 学生管…...
)
LeetCode:169.多数元素(哈希表)
题目 第一版 思路 直接开个哈希表,存储每个数组中的数字和对应出现的次数。然后排序后找出对应最大value值的key。 代码 class Solution {public int majorityElement(int[] nums) {Map<Integer,Integer>map new HashMap<Integer,Integer>();for(…...
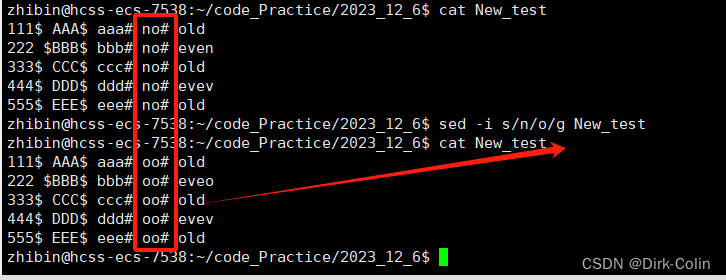
Linux指令学习
目录 1.ls指令 2.pwd命令 3.cd 指令 4. touch指令 5.mkdir指令 6.rmdir指令 && rm 指令 7.man指令 8.cp指令 9.mv指令 10.cat指令 11.more指令 12.less指令 13.head指令 14.find指令: -name 15.grep指令 16.zip/unzip指令: 17.tar…...
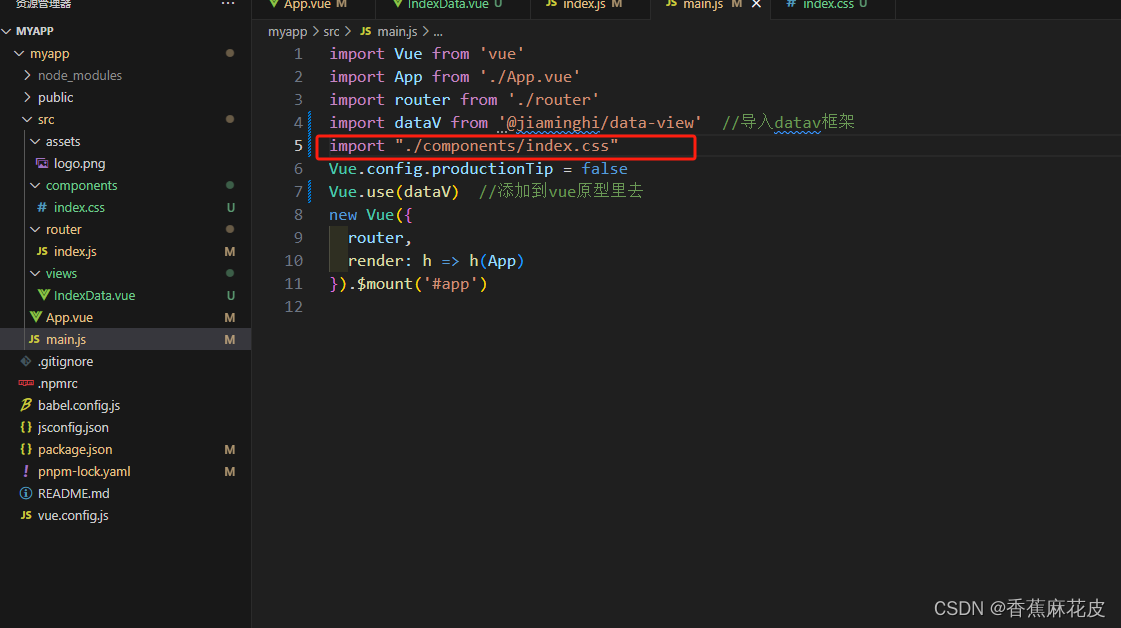
vue2+datav可视化数据大屏(1)
开始 📓 最近打算出一个前端可视化数据大屏的系列专栏,这次将很全面的教大家设计可视化大屏,从开始到打包结束,其中,包括如何设计框架,如何封装axios,等等,本次使用的数据均为mock数…...

【ZYNQ】AXI4总线协议实战:从握手时序到PS-PL高效通信
1. AXI4总线协议基础:从握手信号到通道架构 第一次接触ZYNQ的PS-PL通信时,我被AXI4协议里那些VALID/READY信号搞得头晕眼花。直到在示波器上抓到真实的握手波形,才突然理解这个看似复杂的协议其实像极了我们日常的对话机制——只有当说话方准…...

【低功耗蓝牙】④ 蓝牙MIDI协议:从ESP32 MicroPython代码到智能乐器DIY
1. 蓝牙MIDI协议入门:从音乐小白到智能乐器开发者 第一次听说蓝牙MIDI协议时,我正盯着桌上的ESP32开发板发呆。作为一个只会弹几个和弦的编程爱好者,完全没想到自己能用代码"演奏"音乐。蓝牙MIDI就像音乐世界的通用语言,…...

探索下一代命令行界面:OpenCLI 架构设计与插件化实践
1. 项目概述:一个面向未来的命令行界面原型最近在开源社区里,我注意到一个名为sys-fairy-eve/nightly-mvp-2026-03-19-opencli的项目。这个标题信息量不小,它不像一个成熟的产品,更像是一个开发过程中的里程碑快照。sys-fairy-eve…...

Helm-Intellisense:VS Code智能补全插件,提升values.yaml编写效率
1. 项目概述:为什么我们需要一个Helm智能补全工具?如果你和我一样,日常工作中大量使用Helm来管理Kubernetes应用,那你一定对编写values.yaml文件时那种“盲人摸象”的感觉深有体会。面对一个动辄几十上百行配置的Helm Chart&#…...
:从F0曲线调制到微表情时序对齐)
ElevenLabs情绪驱动API实战手册(2024企业级部署全链路):从F0曲线调制到微表情时序对齐
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs情绪驱动API核心架构与演进脉络 ElevenLabs 的情绪驱动 API 并非简单叠加情感标签的语音合成增强层,而是构建在多模态表征学习与实时声学参数调控双引擎之上的闭环系统。其核心架…...

Arduino与手机蓝牙通信:nRF8001 BLE模块硬件连接与软件配置全解析
1. 项目概述与核心价值如果你手头有一个Arduino项目,想让它和你的手机“说说话”,比如把传感器数据无线传到手机App上显示,或者用手机App远程控制几个LED灯,那么nRF8001这个蓝牙低功耗(BLE)模块绝对是你绕不…...
Pixel Framebuf库:图形化编程驱动LED矩阵,告别底层坐标换算
1. 项目概述:告别点灯,拥抱图形化LED矩阵编程如果你玩过Arduino或者树莓派,大概率接触过WS2812B这类可寻址LED,也就是大家常说的NeoPixel。单个灯珠的控制很简单,setPixelColor一下就能亮。但当你面对一个8x8、16x16甚…...

中鼎智能冲刺港股:年营收18.8亿 诺力股份是实控股东
雷递网 雷建平 5月16日中鼎智能(无锡)科技股份有限公司(简称:“中鼎智能”)日前更新招股书,准备在港交所上市。截至2026年3月31日止三个月,与上年同期相比,中鼎智能录得相对稳定的收…...

为什么92%的设计师调不出正宗铂金印相?3个被忽略的色彩科学陷阱与CIE LAB空间修正公式
更多请点击: https://intelliparadigm.com 第一章:铂金印相的视觉本质与历史语境 铂金印相(Platinum Print)并非一种数字图像处理技术,而是一种19世纪末诞生于摄影化学工艺巅峰的物理显影体系。其视觉本质在于——铂金…...

5分钟快速上手:PlantUML Editor - 告别拖拽,用代码绘制专业UML图表
5分钟快速上手:PlantUML Editor - 告别拖拽,用代码绘制专业UML图表 【免费下载链接】plantuml-editor PlantUML online demo client 项目地址: https://gitcode.com/gh_mirrors/pl/plantuml-editor 还在为绘制复杂的UML图表而烦恼吗?你…...