ROS-ROS通信机制-参数服务器
文章目录
- 一、基础理论知识
- 二、C++实现
- 三、Python实现
一、基础理论知识
参数服务器在ROS中主要用于实现不同节点之间的数据共享。参数服务器相当于是独立于所有节点的一个公共容器,可以将数据存储在该容器中,被不同的节点调用,当然不同的节点也可以往其中存储数据,关于参数服务器的典型应用场景如下:
- 导航实现时,会进行路径规划,比如: 全局路径规划,设计一个从出发点到目标点的大致路径。局部路径规划,会根据当前路况生成时时的行进路径
上述场景中,全局路径规划和局部路径规划时,就会使用到参数服务器:
路径规划时,需要参考小车的尺寸,我们可以将这些尺寸信息存储到参数服务器,全局路径规划节点与局部路径规划节点都可以从参数服务器中调用这些参数
参数服务器,一般适用于存在数据共享的一些应用场景。
概念
以共享的方式实现不同节点之间数据交互的通信模式。
作用
存储一些多节点共享的数据,类似于全局变量。
案例
实现参数增删改查操作。
参数服务器实现是最为简单的,该模型如下图所示,该模型中涉及到三个角色:
- ROS Master (管理者)
- Talker (参数设置者)
- Listener (参数调用者)
ROS Master 作为一个公共容器保存参数,Talker 可以向容器中设置参数,Listener 可以获取参数。
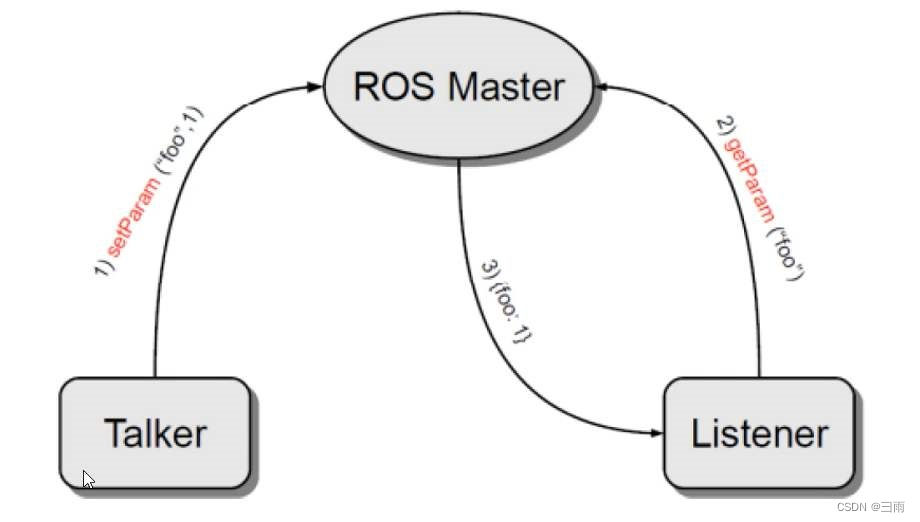
整个流程由以下步骤实现:
1.Talker 设置参数
Talker 通过 RPC 向参数服务器发送参数(包括参数名与参数值),ROS Master 将参数保存到参数列表中。
2.Listener 获取参数
Listener 通过 RPC 向参数服务器发送参数查找请求,请求中包含要查找的参数名。
3.ROS Master 向 Listener 发送参数值
ROS Master 根据步骤2请求提供的参数名查找参数值,并将查询结果通过 RPC 发送给 Listener。
参数可使用数据类型:
- 32-bit integers
- booleans
- strings
- doubles
- iso8601 dates
- lists
- base64-encoded binary data
- 字典
注意:参数服务器不是为高性能而设计的(RPC通信协议的局限性),因此最好用于存储静态的非二进制的简单数据
二、C++实现
需求:实现参数服务器参数的增删改查操作。
在 C++ 中实现参数服务器数据的增删改查,可以通过两套 API 实现:
- ros::NodeHandle
- ros::param
下面为具体操作演示
1.参数服务器新增(修改)参数
/*参数服务器操作之新增与修改(二者API一样)_C++实现:在 roscpp 中提供了两套 API 实现参数操作ros::NodeHandlesetParam("键",值)ros::paramset("键","值")示例:分别设置整形、浮点、字符串、bool、列表、字典等类型参数修改(相同的键,不同的值)*/
#include "ros/ros.h"int main(int argc, char *argv[])
{ros::init(argc,argv,"set_update_param");std::vector<std::string> stus;stus.push_back("zhangsan");stus.push_back("李四");stus.push_back("王五");stus.push_back("孙大脑袋");std::map<std::string,std::string> friends;friends["guo"] = "huang";friends["yuang"] = "xiao";//NodeHandle--------------------------------------------------------ros::NodeHandle nh;nh.setParam("nh_int",10); //整型nh.setParam("nh_double",3.14); //浮点型nh.setParam("nh_bool",true); //boolnh.setParam("nh_string","hello NodeHandle"); //字符串nh.setParam("nh_vector",stus); // vectornh.setParam("nh_map",friends); // map//修改演示(相同的键,不同的值)nh.setParam("nh_int",10000);//param--------------------------------------------------------ros::param::set("param_int",20);ros::param::set("param_double",3.14);ros::param::set("param_string","Hello Param");ros::param::set("param_bool",false);ros::param::set("param_vector",stus);ros::param::set("param_map",friends);//修改演示(相同的键,不同的值)ros::param::set("param_int",20000);return 0;
}
2.参数服务器获取参数
/*参数服务器操作之查询_C++实现:在 roscpp 中提供了两套 API 实现参数操作ros::NodeHandleparam(键,默认值) 存在,返回对应结果,否则返回默认值getParam(键,存储结果的变量)存在,返回 true,且将值赋值给参数2若果键不存在,那么返回值为 false,且不为参数2赋值getParamCached键,存储结果的变量)--提高变量获取效率存在,返回 true,且将值赋值给参数2若果键不存在,那么返回值为 false,且不为参数2赋值getParamNames(std::vector<std::string>)获取所有的键,并存储在参数 vector 中 hasParam(键)是否包含某个键,存在返回 true,否则返回 falsesearchParam(参数1,参数2)搜索键,参数1是被搜索的键,参数2存储搜索结果的变量ros::param ----- 与 NodeHandle 类似*/#include "ros/ros.h"int main(int argc, char *argv[])
{setlocale(LC_ALL,"");ros::init(argc,argv,"get_param");//NodeHandle--------------------------------------------------------/*ros::NodeHandle nh;// param 函数int res1 = nh.param("nh_int",100); // 键存在int res2 = nh.param("nh_int2",100); // 键不存在ROS_INFO("param获取结果:%d,%d",res1,res2);// getParam 函数int nh_int_value;double nh_double_value;bool nh_bool_value;std::string nh_string_value;std::vector<std::string> stus;std::map<std::string, std::string> friends;nh.getParam("nh_int",nh_int_value);nh.getParam("nh_double",nh_double_value);nh.getParam("nh_bool",nh_bool_value);nh.getParam("nh_string",nh_string_value);nh.getParam("nh_vector",stus);nh.getParam("nh_map",friends);ROS_INFO("getParam获取的结果:%d,%.2f,%s,%d",nh_int_value,nh_double_value,nh_string_value.c_str(),nh_bool_value);for (auto &&stu : stus){ROS_INFO("stus 元素:%s",stu.c_str()); }for (auto &&f : friends){ROS_INFO("map 元素:%s = %s",f.first.c_str(), f.second.c_str());}// getParamCached()nh.getParamCached("nh_int",nh_int_value);ROS_INFO("通过缓存获取数据:%d",nh_int_value);//getParamNames()std::vector<std::string> param_names1;nh.getParamNames(param_names1);for (auto &&name : param_names1){ROS_INFO("名称解析name = %s",name.c_str()); }ROS_INFO("----------------------------");ROS_INFO("存在 nh_int 吗? %d",nh.hasParam("nh_int"));ROS_INFO("存在 nh_intttt 吗? %d",nh.hasParam("nh_intttt"));std::string key;nh.searchParam("nh_int",key);ROS_INFO("搜索键:%s",key.c_str());*///param--------------------------------------------------------ROS_INFO("++++++++++++++++++++++++++++++++++++++++");int res3 = ros::param::param("param_int",20); //存在int res4 = ros::param::param("param_int2",20); // 不存在返回默认ROS_INFO("param获取结果:%d,%d",res3,res4);// getParam 函数int param_int_value;double param_double_value;bool param_bool_value;std::string param_string_value;std::vector<std::string> param_stus;std::map<std::string, std::string> param_friends;ros::param::get("param_int",param_int_value);ros::param::get("param_double",param_double_value);ros::param::get("param_bool",param_bool_value);ros::param::get("param_string",param_string_value);ros::param::get("param_vector",param_stus);ros::param::get("param_map",param_friends);ROS_INFO("getParam获取的结果:%d,%.2f,%s,%d",param_int_value,param_double_value,param_string_value.c_str(),param_bool_value);for (auto &&stu : param_stus){ROS_INFO("stus 元素:%s",stu.c_str()); }for (auto &&f : param_friends){ROS_INFO("map 元素:%s = %s",f.first.c_str(), f.second.c_str());}// getParamCached()ros::param::getCached("param_int",param_int_value);ROS_INFO("通过缓存获取数据:%d",param_int_value);//getParamNames()std::vector<std::string> param_names2;ros::param::getParamNames(param_names2);for (auto &&name : param_names2){ROS_INFO("名称解析name = %s",name.c_str()); }ROS_INFO("----------------------------");ROS_INFO("存在 param_int 吗? %d",ros::param::has("param_int"));ROS_INFO("存在 param_intttt 吗? %d",ros::param::has("param_intttt"));std::string key;ros::param::search("param_int",key);ROS_INFO("搜索键:%s",key.c_str());return 0;
}3.参数服务器删除参数
/* 参数服务器操作之删除_C++实现:ros::NodeHandledeleteParam("键")根据键删除参数,删除成功,返回 true,否则(参数不存在),返回 falseros::paramdel("键")根据键删除参数,删除成功,返回 true,否则(参数不存在),返回 false*/
#include "ros/ros.h"int main(int argc, char *argv[])
{ setlocale(LC_ALL,"");ros::init(argc,argv,"delete_param");ros::NodeHandle nh;bool r1 = nh.deleteParam("nh_int");ROS_INFO("nh 删除结果:%d",r1);bool r2 = ros::param::del("param_int");ROS_INFO("param 删除结果:%d",r2);return 0;
}
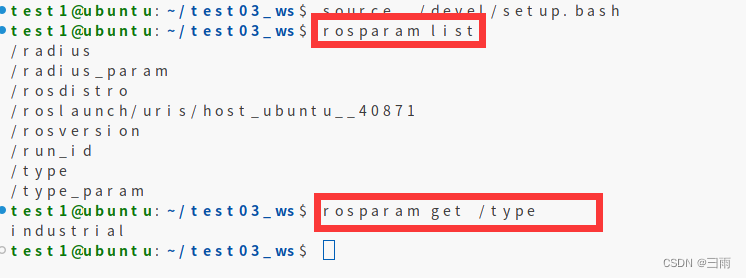
1.列出参数服务器中的参数及获取某个参数的值
三、Python实现
1.参数服务器新增(修改)参数
#! /usr/bin/env python
"""参数服务器操作之新增与修改(二者API一样)_Python实现:
"""import rospyif __name__ == "__main__":rospy.init_node("set_update_paramter_p")# 设置各种类型参数rospy.set_param("p_int",10)rospy.set_param("p_double",3.14)rospy.set_param("p_bool",True)rospy.set_param("p_string","hello python")rospy.set_param("p_list",["hello","haha","xixi"])rospy.set_param("p_dict",{"name":"hulu","age":8})# 修改rospy.set_param("p_int",100)2.参数服务器获取参数
#! /usr/bin/env python"""参数服务器操作之查询_Python实现: get_param(键,默认值)当键存在时,返回对应的值,如果不存在返回默认值get_param_cachedget_param_nameshas_paramsearch_param
"""import rospyif __name__ == "__main__":rospy.init_node("get_param_p")#获取参数int_value = rospy.get_param("p_int",10000)double_value = rospy.get_param("p_double")bool_value = rospy.get_param("p_bool")string_value = rospy.get_param("p_string")p_list = rospy.get_param("p_list")p_dict = rospy.get_param("p_dict")rospy.loginfo("获取的数据:%d,%.2f,%d,%s",int_value,double_value,bool_value,string_value)for ele in p_list:rospy.loginfo("ele = %s", ele)rospy.loginfo("name = %s, age = %d",p_dict["name"],p_dict["age"])# get_param_cachedint_cached = rospy.get_param_cached("p_int")rospy.loginfo("缓存数据:%d",int_cached)# get_param_namesnames = rospy.get_param_names()for name in names:rospy.loginfo("name = %s",name)rospy.loginfo("-"*80)# has_paramflag = rospy.has_param("p_int")rospy.loginfo("包含p_int吗?%d",flag)# search_paramkey = rospy.search_param("p_int")rospy.loginfo("搜索的键 = %s",key)3.参数服务器删除参数
#! /usr/bin/env python
"""参数服务器操作之删除_Python实现:rospy.delete_param("键")键存在时,可以删除成功,键不存在时,会抛出异常
"""
import rospyif __name__ == "__main__":rospy.init_node("delete_param_p")try:rospy.delete_param("p_int")except Exception as e:rospy.loginfo("删除失败")疑惑(待解决):参数服务器的发布方和调用方可以相同吗?就是A先向ROS Master设置参数,然后A之后可以调用所设置的参数吗?
参考:
[1]Autolabor-ROS机器人入门课程《ROS理论与实践》季基础教程
[2]【Autolabor初级教程】ROS机器人入门
[3]胡春旭.ROS机器人开发实践[M].机械工业出版社,2018.
相关文章:
ROS-ROS通信机制-参数服务器
文章目录 一、基础理论知识二、C实现三、Python实现 一、基础理论知识 参数服务器在ROS中主要用于实现不同节点之间的数据共享。参数服务器相当于是独立于所有节点的一个公共容器,可以将数据存储在该容器中,被不同的节点调用,当然不同的节点…...

在github中通过action自动化部署 hugo academic theme,实现上传md文件更新博客内容
在github中通过action自动化部署 hugo academic theme 一、GitHub Action自动化部署Hugo博客方法 主要参考:【Hugo网站搭建】GitHub Action自动化部署Hugo博客 次要参考:使用 Github Action 自动部署 Hugo 博客 二、部署过程中遇到的问题和解决办法 …...

深入理解asyncio:异步编程的基础用法
引言: 随着计算机硬件的不断发展,对于异步编程的需求也越来越强烈。Python中的asyncio模块为开发者提供了一种强大而灵活的异步编程方式。本文将介绍asyncio的基础用法,包括async/await/run语句的使用、多个协程的并发执行、以及在协程中进行…...

Android 消息分发机制解读
前言 想必大家都知道Android系统有自己的一套消息分发机制,,从App启动那一刻起,App就创建了主线程的消息分发实例:Looper.sMainLooper,并开始无限循环,也就是App的心脏,一直跳动,负责协调分配来…...
)
【ML】LSTM应用——预测股票(基于 tensorflow2)
LSTM 应用预测股票数据 所用数据集:https://www.kaggle.com/datasets/yuanheqiuye/bank-stock 基于:tensorFlow 2.x 数据处理 import numpy as np import pandas as pd from matplotlib import pyplot as plt from sklearn.model_selection import tr…...

汇编语言程序设计实验报告
一、实验一 1、实验内容 (1)用Debug命令查看寄存器和内存中的内容 (2)上机过程及程序调试 2、实验目的 (1)要求掌握使用Debug命令查看寄存器和内存的方法; (2)通过…...
设备通信过程(通信流程、通信步骤、通信顺序、设备通信、主机通信)(MAC地址在本地链路中的作用)跳跃(hop))
广域网(WAN)设备通信过程(通信流程、通信步骤、通信顺序、设备通信、主机通信)(MAC地址在本地链路中的作用)跳跃(hop)
文章目录 广域网(WAN)通信:MAC地址在本地链路中的作用引言MAC地址概述什么是MAC地址?如何工作? MAC地址与广域网MAC地址的局限性IP地址和路由 广域网设备通信过程1. 请求生成2. 封装数据帧3. 确定下一跳4. 数据传输5. …...

ExoPlayer架构详解与源码分析(10)——H264Reader
系列文章目录 ExoPlayer架构详解与源码分析(1)——前言 ExoPlayer架构详解与源码分析(2)——Player ExoPlayer架构详解与源码分析(3)——Timeline ExoPlayer架构详解与源码分析(4)—…...

智能优化算法应用:基于粒子群算法3D无线传感器网络(WSN)覆盖优化 - 附代码
智能优化算法应用:基于粒子群算法3D无线传感器网络(WSN)覆盖优化 - 附代码 文章目录 智能优化算法应用:基于粒子群算法3D无线传感器网络(WSN)覆盖优化 - 附代码1.无线传感网络节点模型2.覆盖数学模型及分析3.粒子群算法4.实验参数设定5.算法结果6.参考文…...

微积分-序言
大家好,这里我将为大家带来一个全新的专栏“微积分”。在这里我将为大家讲解微积分的内容,我会从最基础的内容开始讲解。争取让零基础的人也可以看懂和学会。 我也会在后续出一些微积分的题,让大家可以进行巩固和提高。 学习微积分那么就需要…...

ArchLinux安装详细步骤
下载(略)安装VirtualBox(略)新建虚拟机(略)启动 进入提示符 进入安装设置界面 archinstall出现界面: 逐项设置。 Disk我选择了ext4 在Profile中 我选择了KDE作为桌面(选择后按回车…...
react 学习笔记 李立超老师 | (学习中~)
文章目录 react学习笔记01入门概述React 基础案例HelloWorld三个API介绍 JSXJSX 解构数组 创建react项目(手动)创建React项目(自动) | create-react-app事件处理React中的CSS样式内联样式 | 内联样式中使用state (不建议使用)外部样式表 | CSS Module React组件函数式组件和类组…...

Docker镜像和容器的简单操作
1.镜像管理 搜索镜像: 这种方法只能用于官方镜像库 搜索基于 centos 操作系统的镜像 # docker search centos 按星级搜索镜像: 查找 star 数至少为 100 的镜像,默认不加 s 选项找出所有相关 ubuntu 镜像…...

章鱼网络进展月报 | 2023.11.1-11.30
章鱼网络大事摘要 1、2023年12月,Octopus 2.0 将会正式启动。 2、隐私协议 Secret Network 宣布使用 Octopus Network 构建的 NEAR-IBC 连接 NEAR 生态。 3、Louis 受邀作为嘉宾,在 NEARCON2023 的多链网络主题沙龙中发言:我们依然处于区…...
基于Maven构建OSGI应用(Maven和OSGI结合)
基于Maven构建OSGI应用。 使用Maven来构建项目,包括项目的创建、子模块buldle的创建等。使用OSGI来实现动态模块化管理,实现模块的热插拔效果(即插即用)。 创建一个Maven项目:helloworld,并在该项目下创建…...

oracle分组排序后取第一条
在 Oracle 中,可以使用「ROW_NUMBER」函数对某个列进行分组并排序,然后通过「WHERE」语句取第一条记录。 假设有一张「USERS」表,其中包含「ID」、「NAME」、「AGE」和「COUNTRY」列,您可以使用以下 SQL 语句对「AGE」列进行分组…...

MAMBA介绍:一种新的可能超过Transformer的AI架构
有人说,“理解了人类的语言,就理解了世界”。一直以来,人工智能领域的学者和工程师们都试图让机器学习人类的语言和说话方式,但进展始终不大。因为人类的语言太复杂,太多样,而组成它背后的机制,…...
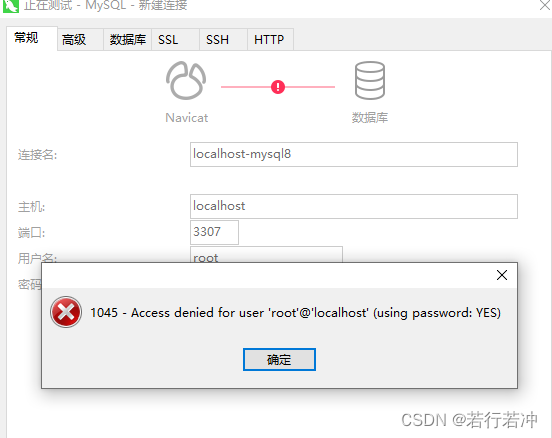
win系统一台电脑安装两个不同版本的mysql教程
文章目录 1.mysql下载zip包(地址)2.解压在你的电脑上(不要再C盘和带中文的路径)3.创建my.ini文件4.更改环境变量(方便使用, 可选)5.打包mysql服务6.初始化mysql的data7.启动刚刚打包的服务8.更改密码 1.mys…...

esp32-s3部署yolox_nano进行目标检测
ESP32-S3部署yolox_nano进行目标检测 一、生成模型部署项目01 环境02 配置TVM包03 模型量化3.1预处理3.2 量化 04 生成项目 二、烧录程序 手上的是ESP32-S3-WROOM-1 N8R8芯片,整个链路跑通了,但是识别速度太慢了,20秒一张图,所以暂…...
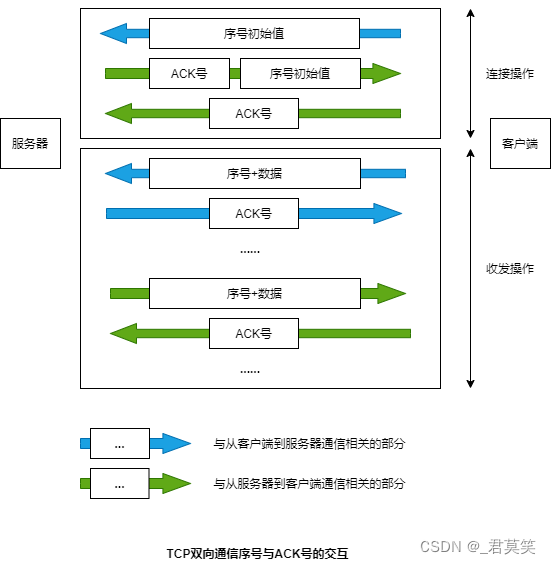
TCP传输数据的确认机制
实际的TCP收发数据的过程是双向的。 TCP采用这样的方式确认对方是否收到了数据,在得到对方确认之前,发送过的包都会保存在发送缓冲区中。如果对方没有返回某些包对应的ACK号,那么就重新发送这些包。 这一机制非常强大。通过这一机制…...

Oracle误操作先别慌:Flashback、UNDO、回收站、Redo 与归档日志一次讲清楚 2026-05-24
1、背景说明本文整理 Oracle 生产环境中误操作恢复相关的核心知识点,包括:Flashback Database Flashback Query UNDO Recycle Bin FRA 快速恢复区 Redo Archived Redo Log 归档日志适用于 Oracle 单实例、RAC,以及 CDB/PDB 多租户环境。在 CD…...

开发个人职场专注深度工作计时程序,区分深度工作和摸鱼时间,提升工作创新效率。
一、实际应用场景描述在真实职场中,开发者常面临如下场景:- 上午:写复杂业务逻辑、设计技术方案(需要深度专注)- 下午:回消息、开会、处理琐事(浅层工作)- 中间频繁穿插:…...

Bun Image:无需 npm 依赖的图像处理管道,支持多格式解码与转换!
1. Bun Image 是什么? Bun Image 是一个可链式调用的图像处理管道,用于对 JPEG、PNG、WebP、HEIC 和 AVIF 图像进行解码、调整大小、旋转和重新编码。它基于 libjpeg - turbo、spng、libwebp 和 SIMD 几何内核构建,无需 npm 依赖,…...

如果你要设计一个“个人助理“Agent,记忆系统应该如何分层?
这个问题挺有意思的,个人助理 Agent 的记忆系统,核心是分层设计——不是所有记忆都放一个地方,得按时效性、访问频率、重要性分层。 我之前做过一个个人助理项目,一开始就把所有记忆都扔向量库里,结果检索慢、成本高、还容易检索到过时信息。后来重构成分层架构,效果好很多。 …...

终极教程:如何用免费Chrome插件一键保存完整网页内容
终极教程:如何用免费Chrome插件一键保存完整网页内容 【免费下载链接】full-page-screen-capture-chrome-extension One-click full page screen captures in Google Chrome 项目地址: https://gitcode.com/gh_mirrors/fu/full-page-screen-capture-chrome-extens…...

LangGraph+Spark智能代理框架:可视化编排大数据机器学习工作流
1. 项目概述与核心价值 如果你是一名数据科学家或机器学习工程师,每天都要和TB甚至PB级别的数据打交道,那么对Apache Spark一定不会陌生。它凭借其内存计算和弹性分布式数据集(RDD)的设计,确实让大规模数据处理的速度提…...

Z变换与数字滤波器设计:从零极点分析到Python实战
1. 从理论到代码:Z变换如何成为数字信号处理的“瑞士军刀”如果你刚开始接触数字信号处理,可能会觉得Z变换是个有点抽象的数学工具。但在我十多年的音频算法和通信系统开发经历里,Z变换远不止是教科书上的公式——它是我们设计、分析和调试数…...

机器学习赋能非结构网格CFD:GNN、PINN与降阶建模实战
1. 项目概述:机器学习如何重塑非结构网格CFD 在计算流体力学(CFD)领域,非结构网格是处理复杂几何形状的“瑞士军刀”。与规则排列的结构化网格不同,非结构网格由不规则分布的节点和单元(如三角形、四面体&a…...

浏览器扩展开发:打造个性化浏览体验
浏览器扩展开发:打造个性化浏览体验 什么是浏览器扩展? 浏览器扩展是一种可以增强浏览器功能的小型软件程序。 扩展类型 类型说明扩展程序完整功能的扩展主题自定义浏览器外观插件NPAPI 插件(已废弃) 扩展结构 my-extension/ ├─…...

AI时代的个人隐私与网络安全自保——从账号密码到设备行为的完整体系
一个很多人没做但很简单的事:去搜索一下自己的真实姓名、手机号、家庭住址,看看哪些信息已经公开在网上。知道自己的暴露面,才知道要重点保护什么。 haveibeenpwned是免费、靠谱、隐私友好的数据泄露查询工具。 安全防护不追求完美࿰…...