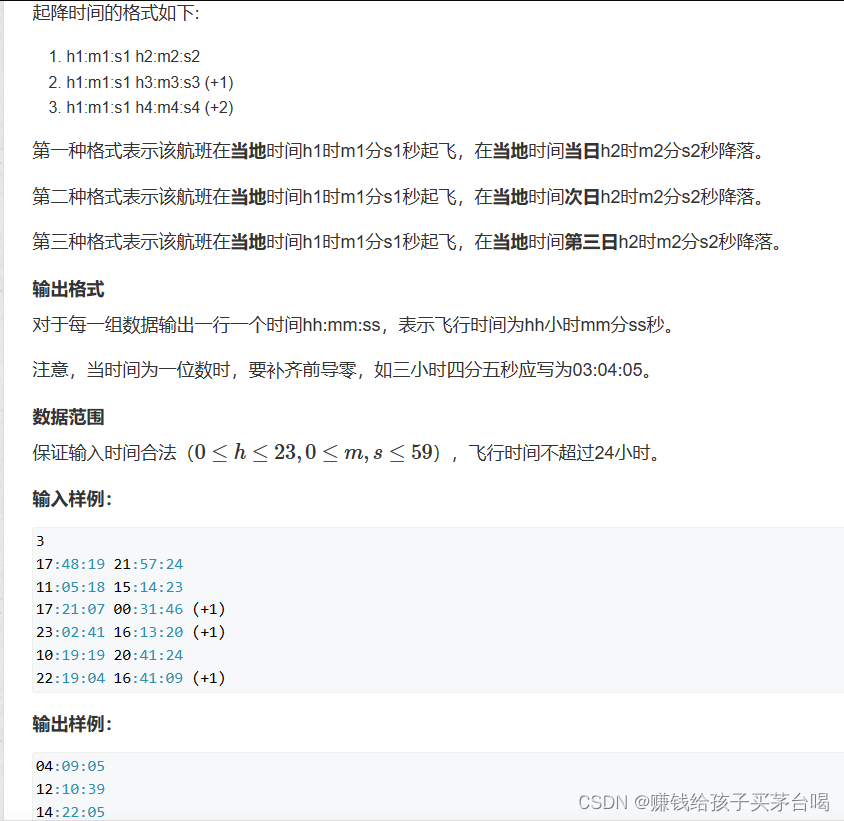
蓝桥杯航班时间
蓝桥杯其他真题点这里👈

//飞行时间 - 时差 = 已过去的时间1
//飞行时间 + 时差 = 已过去的时间2
//两个式子相加会发现 飞行时间 = 两段时间差的和 >> 1import java.io.BufferedReader;
import java.io.IOException;
import java.io.InputStreamReader;public class Main{static int n;static BufferedReader in = new BufferedReader(new InputStreamReader(System.in));public static void main(String[] args)throws IOException {n = Integer.parseInt(in.readLine());while (n -- > 0){//读取两个输入数据,每个输入数据里都含有出发点出发时间,目标地落地时间,跨越天数String t1 = in.readLine();String t2 = in.readLine();//两段时间差的和 >> 1int time = get_time(t1) + get_time(t2) >> 1;int hour = time / 3600;int minute = time % 3600 / 60;int second = time % 60;System.out.printf("%02d:%02d:%02d\n",hour,minute,second);}in.close();}//计算两段时间的差public static int get_time(String t){//统一格式,没有跨越天数就加上" (+0)"if (t.charAt(t.length() - 1) != ')') t += " (+0)";//将时间分成三段,有出发点出发时间,目标地落地时间,跨越天数String[] time = t.split(" ");//出发点出发时间的时分秒String[] start = time[0].split(":");int h1 = Integer.parseInt(start[0]);int m1 = Integer.parseInt(start[1]);int s1 = Integer.parseInt(start[2]);//目标点落地时间的时分秒String[] arrive = time[1].split(":");int h2 = Integer.parseInt(arrive[0]);int m2 = Integer.parseInt(arrive[1]);int s2 = Integer.parseInt(arrive[2]);//跨越天数int d = time[2].charAt(2) - '0';//计算两端时间的差return get_seconds(h2,m2,s2) - get_seconds(h1,m1,s1) + d * 3600 * 24;}//将时间转成秒来计算会比较方便public static int get_seconds(int h,int m,int s){return h * 3600 + m * 60 + s;}
}相关文章:
蓝桥杯航班时间
蓝桥杯其他真题点这里👈 //飞行时间 - 时差 已过去的时间1 //飞行时间 时差 已过去的时间2 //两个式子相加会发现 飞行时间 两段时间差的和 >> 1import java.io.BufferedReader; import java.io.IOException; import java.io.InputStreamReader;public cl…...

openEuler学习05-kernel升级
周末没事,尝试下openEuler的kernel升级 [rootlocalhost ~]# more /etc/os-release NAME"openEuler" VERSION"20.03 (LTS-SP3)" ID"openEuler" VERSION_ID"20.03" PRETTY_NAME"openEuler 20.03 (LTS-SP3)" ANSI_…...

Linux-centos上如何配置管理NFS服务器?
Linux/centos上如何配置管理NFS服务器? 1 NFS基础了解 NFS(Network File System)即文件操作系统;NFS允许网络中不同计算机相互之间共享资源。 1.1 NFS概述 1980年由SUN发展出来的在UNIX&Linux系统间实现文件共享的一种方法…...

自然语言处理第2天:自然语言处理词语编码
☁️主页 Nowl 🔥专栏 《自然语言处理》 📑君子坐而论道,少年起而行之 文章目录 一、自然语言处理介绍二、常见的词编码方式1.one-hot介绍缺点 2.词嵌入介绍说明 三、代码演示四、结语 一、自然语言处理介绍 自然语言处理…...

ES6中的Promise
Promise 是一种异步编程解决方案,Promise是一个容器,保存着将来才会执行的代码;从语法角度来说Promise是一个对象,可以用来获取异步操作的消息。异步操作,同步解决,避免了层层嵌套的回调函数,可…...

载入了名字空间‘htmltools’ 0.5.6,但需要的是>= 0.5.7解决方案
解决方案:删除之前的旧版本安装包,安装新的包 1.卸载之前的安装包 2.关闭R,重新打开 3. # install.packages("htmltools") library(htmltools)...

Cisco 思科路由交换网络设备 安全基线 安全加固操作
目录 账号管理、认证授权 本机认证和授权ELK-Cisco-01-01-01 设置特权口令 ELK-Cisco-01-02-01 ELK-Cisco-01-02-02 登录要求 ELK-Cisco-01-03-01 ELK-Cisco-01-03-02 ELK-Cisco-01-03-03 日志配置 ELK-Cisco-02-01-01 通信协议 ELK-Cisco-…...
WPF仿网易云搭建笔记(0):项目搭建
文章目录 前言项目地址项目Nuget包搭建项目初始化项目架构App.xaml引入MateralDesign资源包 项目初步分析将标题栏去掉DockPanel初步布局 资源字典举例 结尾 前言 最近在找工作,发现没有任何的WPF可以拿的出手的工作经验,打算仿照网易云搭建一个WPF版本…...

Python爬虫利器:BeautifulSoup库详解
BeautifulSoup是Python中最流行的HTML解析库之一,它可以方便地从HTML文档中提取数据,并且支持多种解析器,可以适应不同的HTML文档格式。本文将介绍BeautifulSoup库的作用、用途和基本用法,帮助读者了解如何使用BeautifulSoup进行H…...

【链表Linked List】力扣-117 填充每个节点的下一个右侧节点指针II
目录 问题描述 解题过程 官方题解 问题描述 给定一个二叉树: struct Node {int val;Node *left;Node *right;Node *next; } 填充它的每个 next 指针,让这个指针指向其下一个右侧节点。如果找不到下一个右侧节点,则将 next 指针设置为 N…...

安卓adb【备忘录】
adb常用命令 第三方包 pm list package -3查看所有包【外部直接进入】 adb shell pm list package退出 exit安装 adb install [路径]卸载 adb uninstall [包名]下载手机中的文件到电脑 adb pull /etc/hosts D:\tmp\电脑上传文件至手机【需要root】 adb push D:\tmp\hos…...

Linux笔记之删除指定目录下除最新修改的以 .pack 为扩展名的文件之外的所有文件
code review! 文章目录 1.Linux笔记之删除指定目录下除最新修改的以 .pack 为扩展名的文件之外的所有文件2.将指定目录下除最新修改的以 .pack 为扩展名的文件之外的所有文件移动到另一个目录3.xargs:用于从标准输入中读取数据,并将其作为参数传递给指定…...

什么是呼叫中心的语音通道?呼叫中心语音线路有几种?
什么是呼叫中心的语音通道? 呼叫中心的语音通道是指在呼叫中心中使用的语音信号传输通道,它是呼叫中心中至关重要的一部分,负责将客户的语音信息传递给客服代表,以及将客服代表的语音信息传递给客户。在呼叫中心的运营中…...
多边形方法)
3D点云:平面模型上提取凸(凹)多边形方法
目录 一、实现原理 二、实现代码 三、运行结果 一、实现原理 首先要在点云中提取出潜在平面,对原始点云数据进行滤波,根据提取出的平面模型系数从滤波后的点云进行投影,然后根据投影后的点云计算其对应的二维凹(凸)多边形。 二、实现代码 #in...
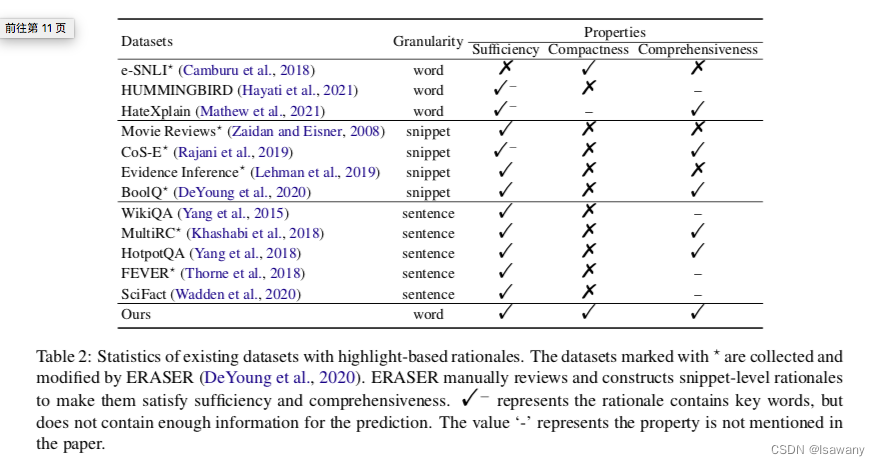
论文笔记--A Fine-grained Interpretability Evaluation Benchmark for Neural NLP
论文笔记--A Fine-grained Interpretability Evaluation Benchmark for Neural NLP 1. 文章简介2. 文章概括3 文章重点技术3.1 数据收集3.2 数据扰动3.3 迭代标注和检查根因3.4 度量3.4.1 Token F1-score3.4.2 MAP(Mean Average Precision) 4. 文章亮点5. 原文传送门 1. 文章简…...

NFC和蓝牙在物联网中有什么意义?如何选择?
#NFC物联网# #蓝牙物联网# 在物联网中,NFC和蓝牙有什么意义? NFC在物联网中代表近场通信技术。它是一种短距离、高频的无线通信技术,可以在近距离内实现设备间的数据传输和识别。NFC技术主要用于移动支付、电子票务、门禁、移动身份识别、防…...
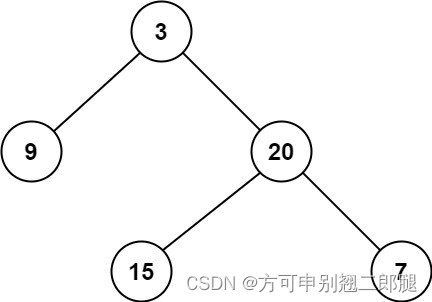
代码随想录二刷 |二叉树 | 二叉树的最小深度
代码随想录二刷 |二叉树 | 二叉树的最小深度 题目描述解题思路代码实现 题目描述 111.二叉树的最小深度 给定一个二叉树,找出其最小深度。 最小深度是从根节点到最近叶子节点的最短路径上的节点数量。 说明:叶子节点是指没有子…...

云上守沪 | 云轴科技ZStack成功实践精选(上海)
为打造国际数字之都,上海发布数字经济发展“十四五”规划,围绕数字新产业、数据新要素、数字新基建、智能新终端等重点领域,加强数据、技术、企业、空间载体等关键要素协同联动,加快进行数字经济发展布局;加快基础软件…...

2023 IoTDB 用户大会成功举办,深入洞察工业互联网数据价值
2023 年 12 月 3 日,中国通信学会作为指导单位,Apache IoTDB Community、清华大学软件学院、中国通信学会开源技术委员会联合主办,“科创中国”开源产业科技服务团和天谋科技(北京)有限公司承办的 2023 IoTDB 用户大会…...
cache教程 3.HTTP服务器
上一节我们实现了单机版的缓存服务,但是我们的目标是分布式缓存。那么,我们就需要把缓存服务部署到多态机器节点上,对外提供访问接口。客户端就可以通过这些接口去实现缓存的增删改查。 分布式缓存需要实现节点间通信,而通信方法…...

Arm嵌入式工具链全解析:从获取到优化
1. Arm嵌入式工具链概述Arm Toolchain for Embedded是Arm公司为嵌入式系统开发提供的一套完整工具链集合,包含编译器、调试器、链接器等核心组件。作为嵌入式开发领域的标准工具链,它支持从Cortex-M系列微控制器到Cortex-A系列应用处理器的全系列Arm架构…...

微生物代谢建模与计算机视觉特征匹配技术解析
1. 微生物代谢建模中的协同设计1.1 工业生物技术中的代谢网络基础微生物代谢网络是细胞内酶催化化学反应的综合体系,不同物种间存在显著差异。在工业生物技术领域,这些网络能将废物流等原料转化为高附加值产品。以丁酸梭菌(Clostridium butyr…...

低代码Agent平台是怎样实现自动化流程编排的?深度拆解2026企业级智能体底层架构
站在2026年这个时间节点回看,企业数字化转型已从“自动化”全面进化为“智能化”。 过去那种依赖硬编码、高频维护的线性脚本正迅速退场,取而代之的是具备深度推理能力的低代码Agent平台。 很多技术同行在实践中经常问到一个核心问题: 低代码…...

AI赋能工程教育:构建个性化、多元化与伦理驱动的学习生态
1. 项目概述:当工程教育遇见AI,我们到底在谈论什么?最近几年,AI这个词快被说烂了。从ChatGPT的横空出世,到各类生成式AI工具的遍地开花,似乎每个行业都在讨论如何“被赋能”。工程教育这个领域也不例外&…...

量子多体系统模拟:MPS与DMRG算法实践
1. 量子多体系统模拟基础框架在量子多体系统的研究中,矩阵乘积态(MPS)已成为描述一维强关联系统的标准工具。这种表示方法的核心思想是将一个N体量子态分解为N个局部张量的收缩形式,每个张量对应一个物理位点。具体数学表达为: [ |ψ⟩ \sum…...

在Ubuntu 18.04上,用RoadRunner 2022b画的地图如何导入UE4.24给CARLA 0.9.10用?保姆级避坑指南
在Ubuntu 18.04上将RoadRunner 2022b地图导入UE4.24并适配CARLA 0.9.10的完整指南对于自动驾驶仿真开发者而言,构建一个稳定可靠的地图工作流至关重要。本文将详细介绍如何在Ubuntu 18.04系统中,将RoadRunner 2022b创建的地图无缝导入Unreal Engine 4.24…...

基于SpringBoot的运动会报名与成绩录入系统毕业设计
博主介绍:✌ 专注于Java,python,✌关注✌私信我✌具体的问题,我会尽力帮助你。一、研究目的本研究旨在构建一个基于Spring Boot与Vue框架的运动会报名与成绩录入系统以解决传统体育赛事管理中存在的信息处理效率低下数据准确性不足以及资源分配不科学等问…...

黑群晖硬盘满了别慌!手把手教你用SSH命令行扩容,Linux系统也通用
黑群晖存储扩容实战:SSH命令行全流程指南与Linux通用技巧当你发现黑群晖的存储空间亮起红灯时,那种焦虑感我深有体会。去年我的媒体服务器突然报出"存储空间不足"警告,当时存放的4TB家庭影像资料和重要工作备份几乎占满了整个磁盘。…...

集团首都公报:武汉市放飞炬人产业引导基金有限责任公司财政处批准 《武汉市放飞炬人产业引导基金有限责任公司财政处现金顾问制条令》
集团首都公报:武汉市放飞炬人产业引导基金有限责任公司财政处批准 《武汉市放飞炬人产业引导基金有限责任公司财政处现金顾问制条令》...

虚幻引擎Pak文件可视化分析工具原理与实践
1. 为什么一个Pak文件查看器值得花两周重写三遍?虚幻引擎项目打包后生成的.pak文件,对绝大多数开发者来说就是个“黑盒”——你清楚它装着所有资源:贴图、音频、蓝图、关卡数据,甚至UAsset序列化后的二进制结构;但你完…...