科技提升安全,基于YOLOv6开发构建商超扶梯场景下行人安全行为姿态检测识别系统
在商超等人流量较为密集的场景下经常会报道出现一些行人在扶梯上摔倒、受伤等问题,随着AI技术的快速发展与不断普及,越来越多的商超、地铁等场景开始加装专用的安全检测预警系统,核心工作原理即使AI模型与摄像头图像视频流的实时计算,通过对行为扶梯上的行为进行实时检测识别来对出现的危险行为进行快速预警响应避免后续出现严重的后果。本文的主要目的就是想要基于商超扶梯场景来开发构建行人安全行为检测识别系统,探索分析基于AI科技提升安全保障的可行性,本文是AI助力商超扶梯等场景安全提升的第五篇文章,前文系列如下:
《科技提升安全,基于SSD开发构建商超扶梯场景下行人安全行为姿态检测识别系统》
https://blog.csdn.net/Together_CZ/article/details/134892776《科技提升安全,基于YOLOv3开发构建商超扶梯场景下行人安全行为姿态检测识别系统》
https://blog.csdn.net/Together_CZ/article/details/134892866《科技提升安全,基于YOLOv4开发构建商超扶梯场景下行人安全行为姿态检测识别系统》
https://blog.csdn.net/Together_CZ/article/details/134893058《科技提升安全,基于YOLOv5系列模型【n/s/m/l/x】开发构建商超扶梯场景下行人安全行为姿态检测识别系统》
https://blog.csdn.net/Together_CZ/article/details/134918766本文的核心思想就是基于YOLOv6模型来开发构建智能检测识别模型,首先看下实例效果:
Yolov6是美团开发的轻量级检测算法,截至目前为止该算法已经迭代到了4.0版本,每一个版本都包含了当时最优秀的检测技巧和最最先进的技术,YOLOv6的Backbone不再使用Cspdarknet,而是转为比Rep更高效的EfficientRep;它的Neck也是基于Rep和PAN搭建了Rep-PAN;而Head则和YOLOX一样,进行了解耦,并且加入了更为高效的结构。YOLOv6也是沿用anchor-free的方式,抛弃了以前基于anchor的方法。除了模型的结构之外,它的数据增强和YOLOv5的保持一致;而标签分配上则是和YOLOX一样,采用了simOTA;并且引入了新的边框回归损失:SIOU。
YOLOv5和YOLOX都是采用多分支的残差结构CSPNet,但是这种结构对于硬件来说并不是很友好。所以为了更加适应GPU设备,在backbone上就引入了ReVGG的结构,并且基于硬件又进行了改良,提出了效率更高的EfficientRep。RepVGG为每一个3×3的卷积添加平行了一个1x1的卷积分支和恒等映射的分支。这种结构就构成了构成一个RepVGG Block。和ResNet不同的是,RepVGG是每一层都添加这种结构,而ResNet是每隔两层或者三层才添加。RepVGG介绍称,通过融合而成的3x3卷积结构,对计算密集型的硬件设备很友好。

简单看下实例数据情况:

训练数据配置文件如下所示:
# Please insure that your custom_dataset are put in same parent dir with YOLOv6_DIR
train: ./dataset/images/train # train images
val: ./dataset/images/test # val images
test: ./dataset/images/test # test images (optional)# whether it is coco dataset, only coco dataset should be set to True.
is_coco: False# Classes
nc: 4 # number of classes# class names
names: ['bow', 'down', 'shake', 'up']默认我先选择的是yolov6s系列的模型,基于finetune来进行模型的开发:
# YOLOv6s model
model = dict(type='YOLOv6s',pretrained='weights/yolov6s.pt',depth_multiple=0.33,width_multiple=0.50,backbone=dict(type='EfficientRep',num_repeats=[1, 6, 12, 18, 6],out_channels=[64, 128, 256, 512, 1024],fuse_P2=True,cspsppf=True,),neck=dict(type='RepBiFPANNeck',num_repeats=[12, 12, 12, 12],out_channels=[256, 128, 128, 256, 256, 512],),head=dict(type='EffiDeHead',in_channels=[128, 256, 512],num_layers=3,begin_indices=24,anchors=3,anchors_init=[[10,13, 19,19, 33,23],[30,61, 59,59, 59,119],[116,90, 185,185, 373,326]],out_indices=[17, 20, 23],strides=[8, 16, 32],atss_warmup_epoch=0,iou_type='giou',use_dfl=False, # set to True if you want to further train with distillationreg_max=0, # set to 16 if you want to further train with distillationdistill_weight={'class': 1.0,'dfl': 1.0,},)
)solver = dict(optim='SGD',lr_scheduler='Cosine',lr0=0.0032,lrf=0.12,momentum=0.843,weight_decay=0.00036,warmup_epochs=2.0,warmup_momentum=0.5,warmup_bias_lr=0.05
)data_aug = dict(hsv_h=0.0138,hsv_s=0.664,hsv_v=0.464,degrees=0.373,translate=0.245,scale=0.898,shear=0.602,flipud=0.00856,fliplr=0.5,mosaic=1.0,mixup=0.243,
)
终端执行:
python tools/train.py --batch-size 16 --conf configs/yolov6s_finetune.py --data data/self.yaml --fuse_ab --device 0 --name yolov6s --epochs 100 --workers 2即可启动训练。
日志输出如下所示:

等待训练完成之后,我们来整体看下结果详情:
Training completed in 11.585 hours.
loading annotations into memory...
Done (t=0.01s)
creating index...
index created!
Loading and preparing results...
DONE (t=0.21s)
creating index...
index created!
Running per image evaluation...
Evaluate annotation type *bbox*
DONE (t=2.20s).
Accumulating evaluation results...
DONE (t=0.31s).Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.667Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.914Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.769Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.277Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.403Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.727Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.627Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.734Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.798Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.491Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.753Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.818可视化推理实例如下所示:

热力图效果如下所示:
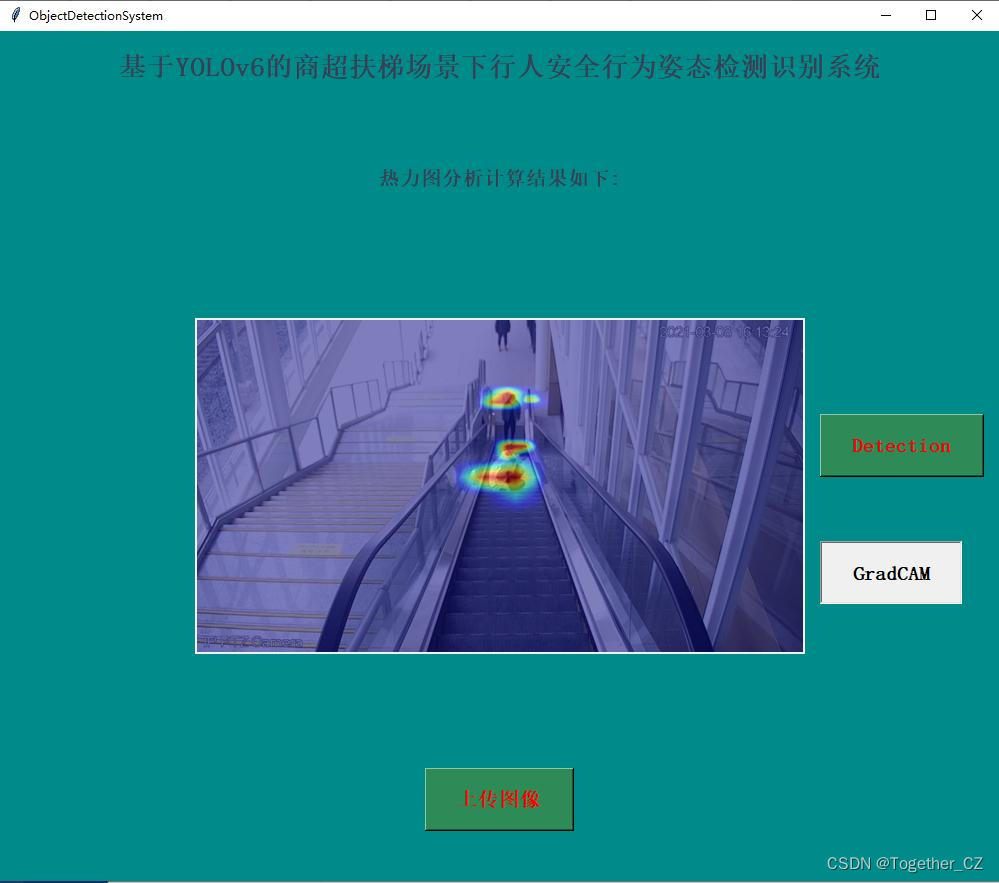
感兴趣的话也都可以自行尝试一下!
相关文章:
科技提升安全,基于YOLOv6开发构建商超扶梯场景下行人安全行为姿态检测识别系统
在商超等人流量较为密集的场景下经常会报道出现一些行人在扶梯上摔倒、受伤等问题,随着AI技术的快速发展与不断普及,越来越多的商超、地铁等场景开始加装专用的安全检测预警系统,核心工作原理即使AI模型与摄像头图像视频流的实时计算…...
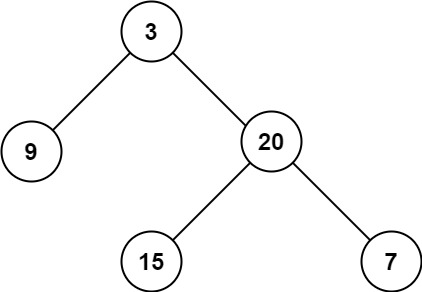
二叉树的最大深度
问题描述: 给定一个二叉树 root ,返回其最大深度。 二叉树的 最大深度 是指从根节点到最远叶子节点的最长路径上的节点数。 示例 1: 输入:root [3,9,20,null,null,15,7] 输出:3示例 2: 输入࿱…...
nginx配置正向代理支持https
操作系统版本: Alibaba Cloud Linux 3.2104 LTS 64位 nginx版本: nginx-1.25.3 1. 下载软件 切换目录 cd /server wget http://nginx.org/download/nginx-1.25.3.tar.gz 1.1解压 tar -zxvf nginx-1.25.3.tar.gz 1.2切换到源码所在目录…...

奥比中光 Femto Bolt相机ROS配置
机械臂手眼标定详解 作者: Herman Ye Auromix 测试环境: Ubuntu20.04/22.04 、ROS1 Noetic/ROS2 Humble、X86 PC/Jetson Orin、Kinect DK/Femto Bolt 更新日期: 2023/12/12 注1: Auromix 是一个机器人爱好者开源组织。 注2&#…...

scala表达式
1.8 表达式(重点) # 语句(statement):一段可执行的代码# 表达式(expression):一段可以被求值的代码,在Scala中一切都是表达式 - 表达式一般是一个语句块,可包含一条或者多条语句,多条语句使用“…...

uniapp,点击选中并改变颜色,第二次点击取消选中状态
一、效果图 二、代码实现 字符串的indexOf和数组的indexOf用法一致! arr.indexOf(item) 该方法返回某个元素在数组中的位置。若没检索到,则返回 -1。 关键代码:(通过:class绑定) :class"selectList.indexOf(sub.type) ! -1 ? right_ite…...

mmyolo的bbox_loss和检测bbox都是空
最近用mmyolo训练自己的数据集的时候发现训练的时候loss_bbox0,测试和eval的时候结果也全是空的,排除了数据集读取的问题,最后发现是config中自定义了自己的类别但是没有传给dataset。。。 简而言之,在自定义了数据集里的metainf…...
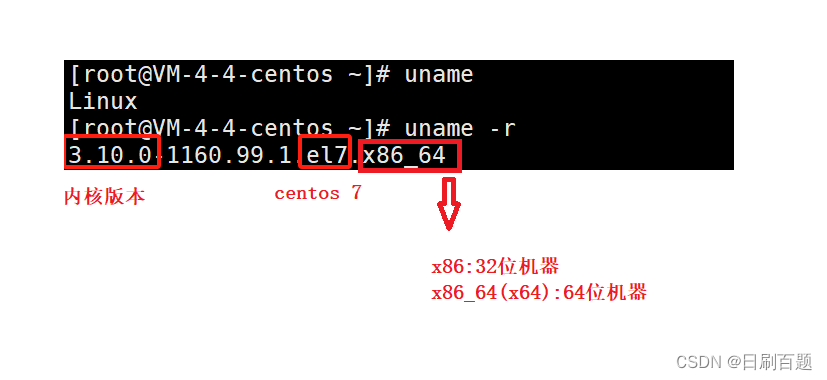
Linux——基本指令(二)
个人主页:日刷百题 系列专栏:〖C语言小游戏〗〖Linux〗〖数据结构〗 〖C语言〗 🌎欢迎各位→点赞👍收藏⭐️留言📝 写在前面: 紧接上一章,我们在理解接下来的命令之前,…...
渲染农场对工业产品渲染带来的意义与优势?
随着科技的进步,利用精细渲染图来呈现和推广工业设计的创新已成为行业标准。这些图像在产品研发、设计评审和营销阶段起着关键作用,同时对产品最终的成功也产生深远影响。然而,由于产品设计日渐复杂,制作渲染图的任务变得极具挑战…...
产品入门第二讲:Axure产品元件库的使用
📚📚 🏅我是默,一个在CSDN分享笔记的博主。📚📚 🌟在这里,我要推荐给大家我的专栏《Axure》。🎯🎯 🚀无论你是编程小白,还是…...
Linux 静默安装单机 Oracle 19C 数据库)
(第7天)Linux 静默安装单机 Oracle 19C 数据库
Linux 静默安装安装单机 Oracle 19C 数据库(第7天) 很多朋友经常会问,如果生产环境不允许安装 Linux 图形化界面怎么办?是不是有其他的方式来安装部署 Oracle 数据库呢?答案是肯定的! 我们可以通过命令行的方式来静默安装,不调用图形化界面,当然也就没有那么简单了!…...

智能优化算法应用:基于入侵杂草算法3D无线传感器网络(WSN)覆盖优化 - 附代码
智能优化算法应用:基于入侵杂草算法3D无线传感器网络(WSN)覆盖优化 - 附代码 文章目录 智能优化算法应用:基于入侵杂草算法3D无线传感器网络(WSN)覆盖优化 - 附代码1.无线传感网络节点模型2.覆盖数学模型及分析3.入侵杂草算法4.实验参数设定5.算法结果6.…...
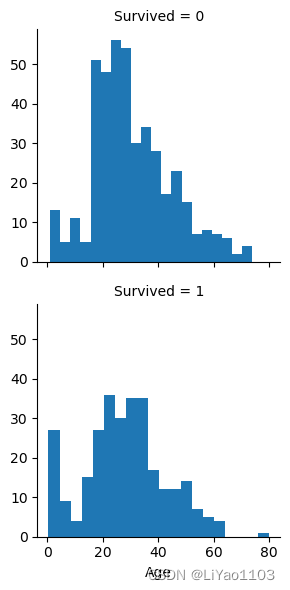
数据挖掘目标(Kaggle Titanic 生存测试)
import numpy as np import pandas as pd import matplotlib.pyplot as plt import seaborn as sns1.数据导入 In [2]: train_data pd.read_csv(r../老师文件/train.csv) test_data pd.read_csv(r../老师文件/test.csv) labels pd.read_csv(r../老师文件/label.csv)[Su…...
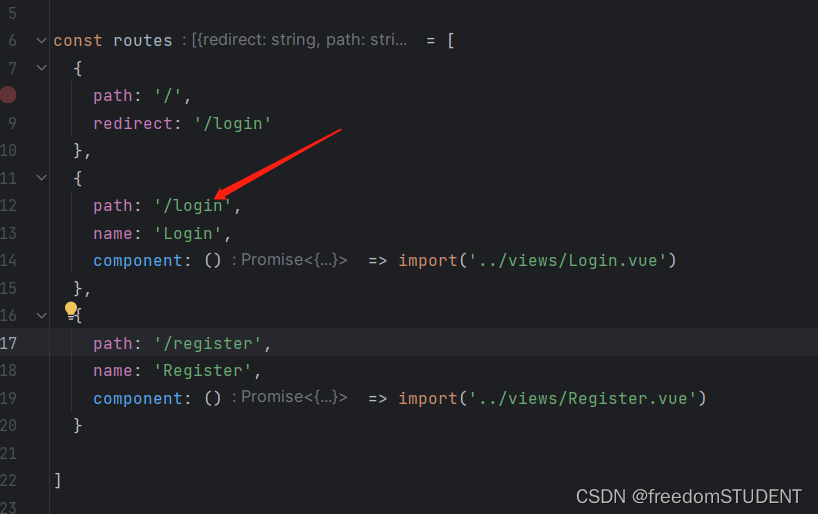
【Vue】router.push用法实现路由跳转
目录 router.push用法 在Login.vue中 在Register.vue中 上一篇:登录与注册界面的制作 https://blog.csdn.net/m0_67930426/article/details/134895214?spm1001.2014.3001.5502 制作了登录与注册界面,并介绍了相关表单元素即属性的用法 在登录页面…...
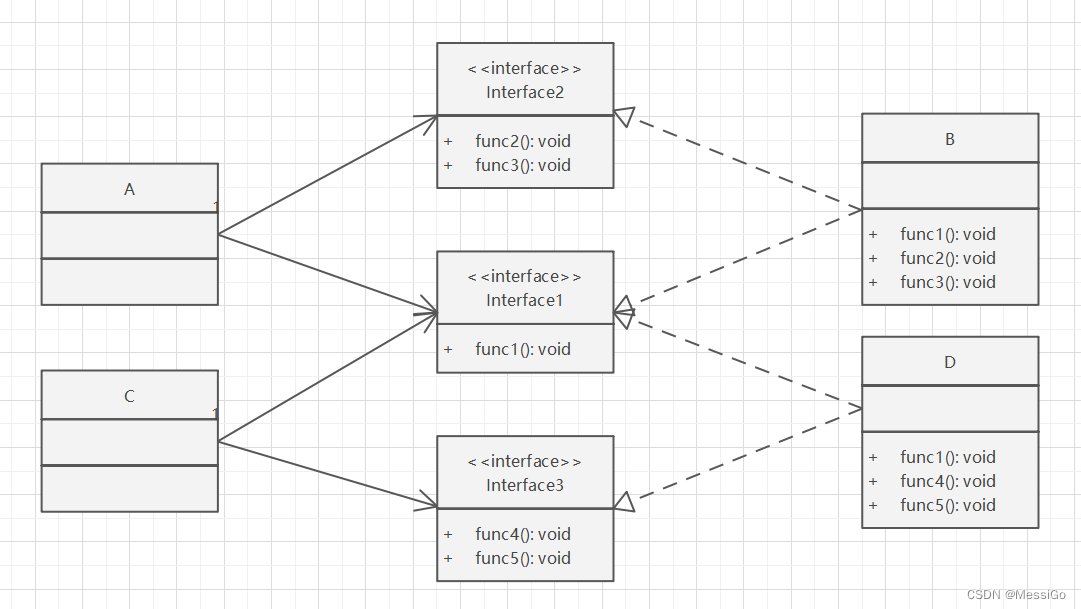
设计原则 | 接口隔离原则
一、接口隔离原则 1、原理 客户端不应该依赖它不需要的接口,即一个类对另一个类的依赖应该建立在最小的接口上。如果强迫客户端依赖于那些它们不使用的接口,那么客户端就面临着这个未使用的接口的改变所带来的变更,这无意间导致了客户程序之…...
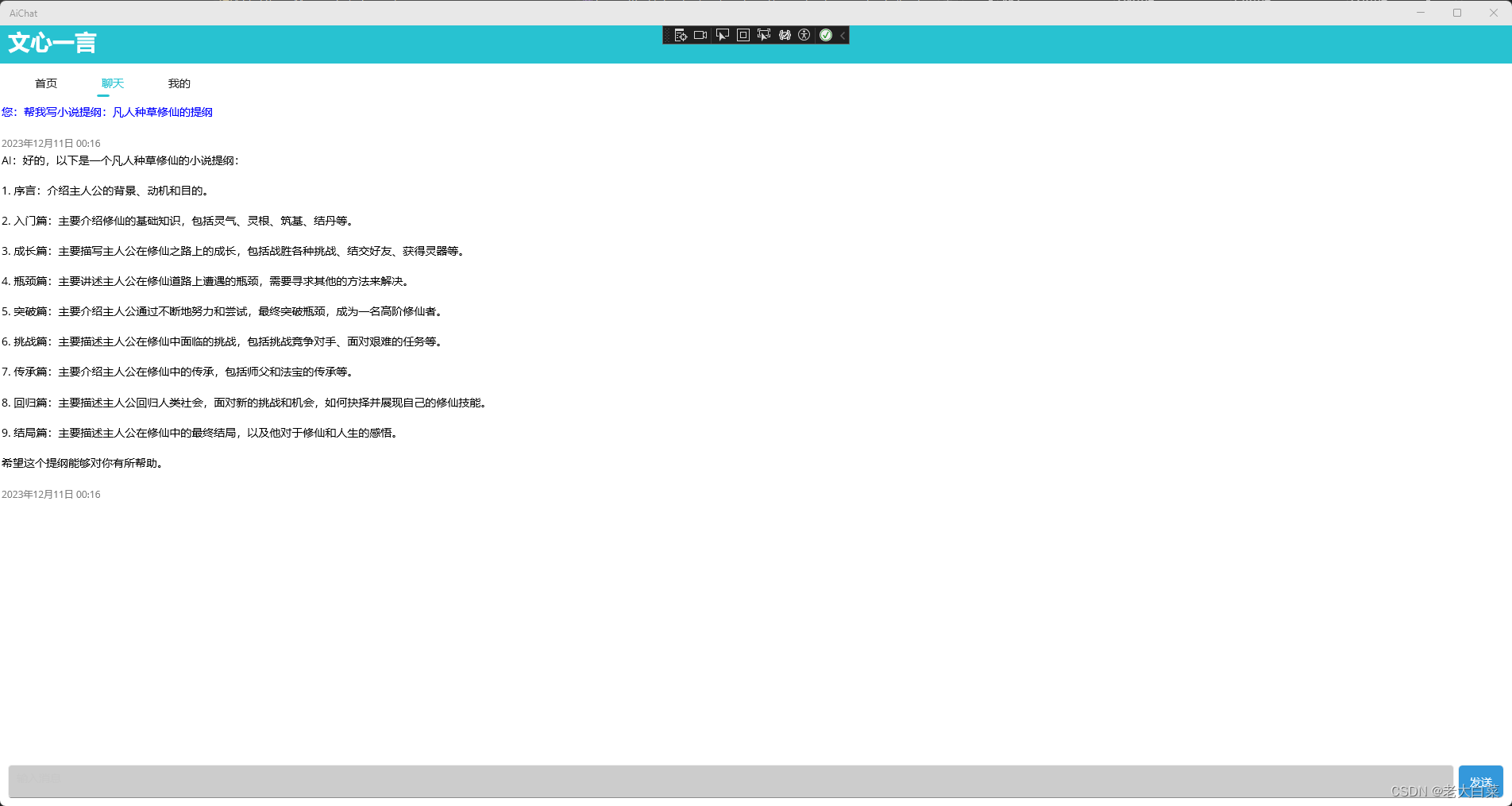
maui 调用文心一言开发的聊天APP 3
主要是对代码进行了优化 上一个版本写死了帐号跟密码 ,这一个帐本有户可以直接设置对相关的key以及secret如果设置错时,在聊天中也会返回提示。注册帐号时同时也设置了key及secrete升级到了net.8.0导出APK,上一个版本是导出abb.解决了变型问…...
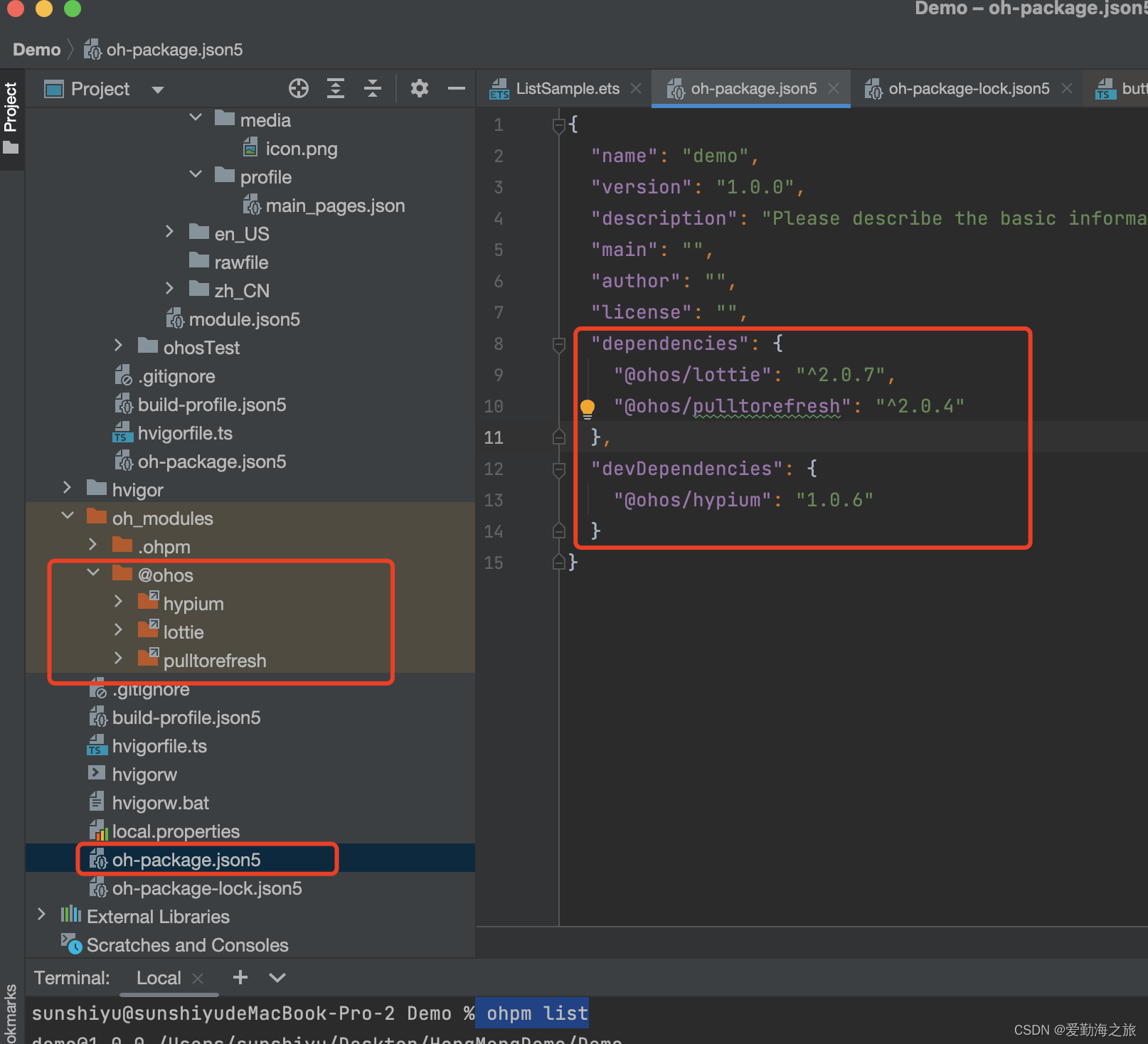
鸿蒙开发 - ohpm安装第三方库
前端开发难免使用第三方库,鸿蒙亦是如此,在使用 DevEco Studio 开发工具时,如何引入第三方库呢?操作步骤如下,假设你使用的是MacOS,假设你已经创建了了一个项目: 一、配置 HTTP Proxy 在打开了…...

[C++] new和delete
使用new时调用构造函数使用delete时调用析构函数 构造函数 使用new动态分配内存时,如果分配的是基本类型的内存,则不会调用构造函数。如果分配的是自定义类型的内存,则会调用构造函数进行对象的初始化。 例如: int* pInt new…...
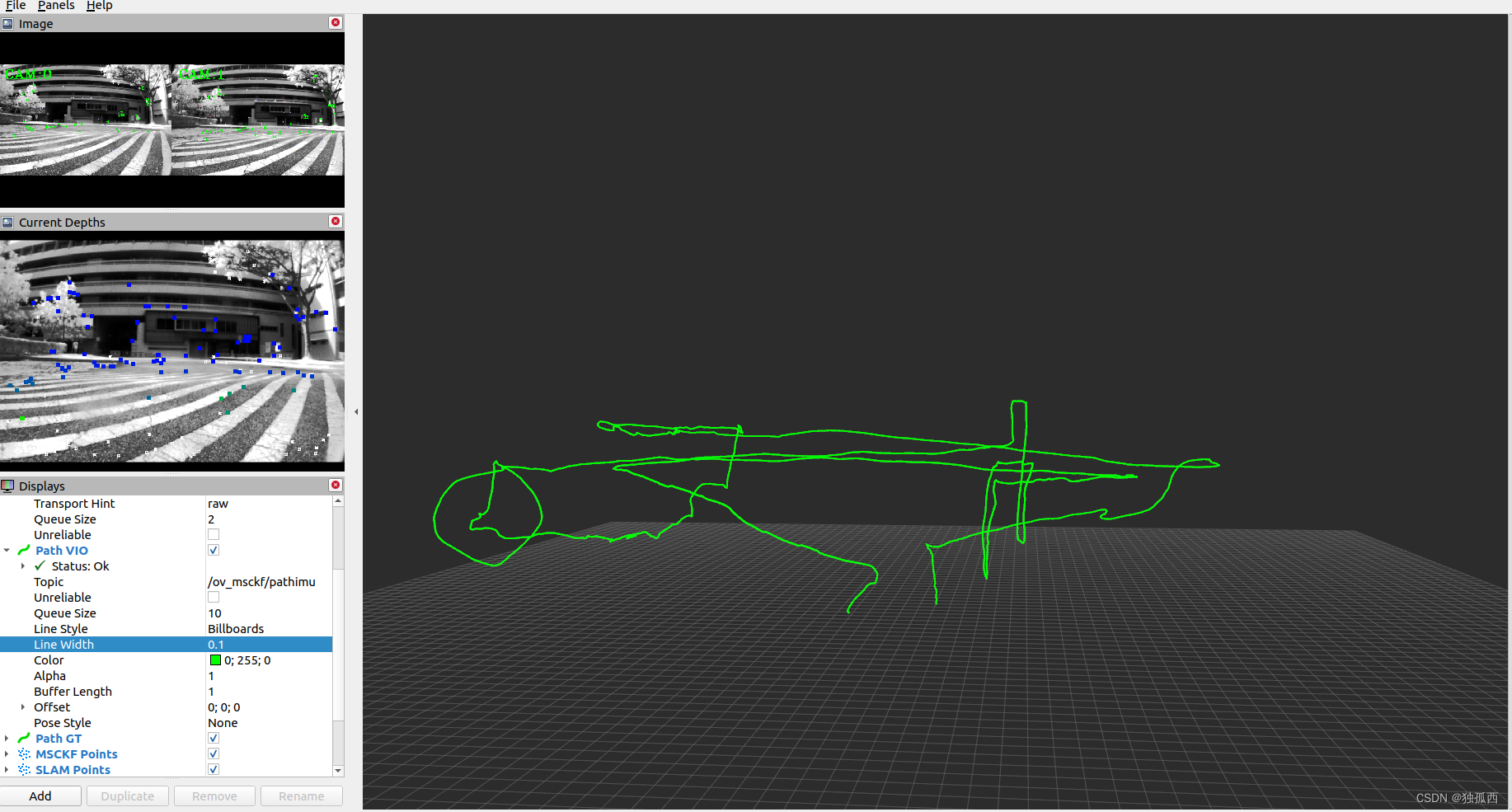
OpenVINS学习2——VIRAL数据集eee01.bag运行
前言 周末休息了两天,接着做上周五那个VIRAL数据集没有运行成功的工作。现在的最新OpenVINS需要重新写配置文件,不像之前那样都写在launch里,因此需要根据数据集情况配置好estimator_config.yaml还有两个标定参数文件。 VIRAL数据集 VIRAL…...
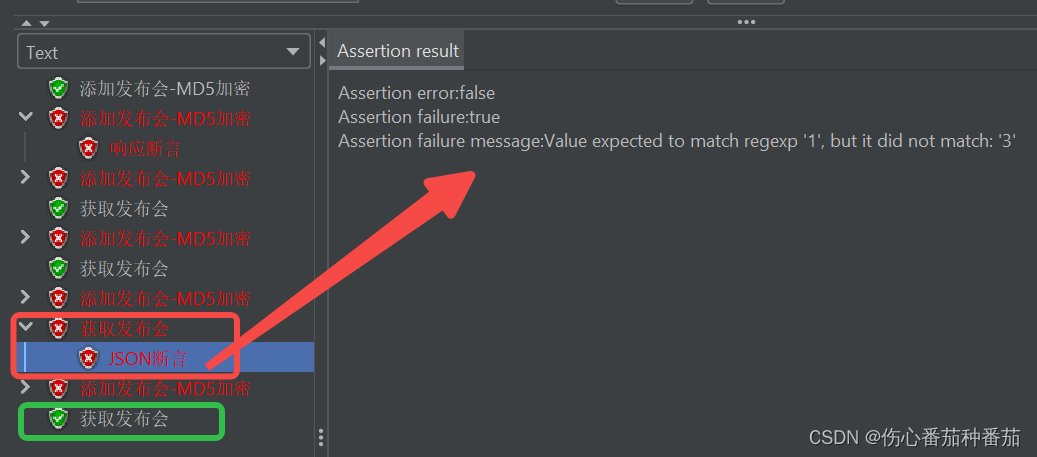
jemeter,断言:响应断言、Json断言
一、响应断言 接口A请求正常返回值如下: {"status": 10013, "message": "user sign timeout"} 在该接口下创建【响应断言】元件,配置如下: 若断言成功,则查看结果树的接口显示绿色,若…...
)
告别手动更新!用Python脚本+Excel表格批量修改UG零件参数(NX2007实战)
告别手动更新!用Python脚本Excel表格批量修改UG零件参数(NX2007实战) 在工业设计领域,UG NX作为主流的三维建模软件,其参数化设计能力直接影响产品迭代效率。传统手动修改模型参数的方式不仅耗时费力,还容易…...

Taotoken平台Token计费模式下的用量看板使用指南
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken平台Token计费模式下的用量看板使用指南 作为项目管理者,当团队同时接入多个大语言模型进行开发时,…...

Grounding DINO实战评测:对比GLIP、OV-DETR,在COCO和LVIS数据集上到底强在哪?
Grounding DINO技术解析:多模态开放集检测的突破与实践 在计算机视觉与自然语言处理的交叉领域,开放集目标检测正经历着前所未有的技术革新。传统检测模型受限于预定义类别集的桎梏,而新一代多模态大模型通过融合视觉与语言信号,实…...

Egg.js重构Controller最佳实践:自定义核心组件与架构优化指南
Egg.js重构Controller最佳实践:自定义核心组件与架构优化指南 【免费下载链接】examples Store all egg examples in one place 项目地址: https://gitcode.com/gh_mirrors/examples109/examples Egg.js作为企业级Node.js框架,其Controller层是业…...

Next.js Monorepo包管理:使用Yarn Workspace的10个最佳实践指南
Next.js Monorepo包管理:使用Yarn Workspace的10个最佳实践指南 【免费下载链接】nextjs-monorepo-example Collection of monorepo tips & tricks 项目地址: https://gitcode.com/gh_mirrors/ne/nextjs-monorepo-example 在现代前端开发中,…...

程序员AI大模型转型:从入门到精通,轻松掌握大模型开发,高薪职位等你来拿!
在人工智能(AI)迅速发展的背景下,从传统的编程领域如Java程序员转向大模型开发是一个既充满挑战也充满机遇的过程。对于 Java 程序员来说,这也是一个实现职业转型、提升薪资待遇的绝佳机遇。 一、明确大模型概念 简单来说…...

AArch64虚拟内存系统架构与地址转换详解
1. AArch64虚拟内存系统架构概述虚拟内存是现代计算机系统的核心机制,它通过地址转换技术将程序使用的虚拟地址(VA)映射到实际的物理地址(PA)。AArch64作为ARMv8-A和ARMv9-A架构的64位执行状态,其虚拟内存系统在设计上兼顾了灵活性和性能需求。在AArch64…...

FanControl风扇控制软件:5分钟快速上手指南,轻松解决电脑噪音与散热难题
FanControl风扇控制软件:5分钟快速上手指南,轻松解决电脑噪音与散热难题 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gi…...

MiniMax Agent 正式更名 Mavis 上线多智能体协作
如果你用过AI助手,大概都有过这种感受:一个AI同时干太多事,要么顾此失彼,要么卡在某个环节原地转圈。 MiniMax显然也看到了这个问题。 5 月 13 日,他们正式宣布旗下Agent产品全面升级,并给它起了个新名字—…...

福特押注五款新车型,含电动车与Bronco,欲重振欧洲市场
福特计划未来三年内在欧洲推出五款全新乘用车,以重振其在欧洲市场日渐式微的品牌形象。这一"福特欧洲乘用车新纪元"计划涵盖一款全新的多能源Bronco SUV、一款小型纯电掀背车、一款纯电SUV,以及两款多能源跨界SUV,所有车型均专为欧…...