STM32-TIM定时器输出比较
目录
一、输出比较简介
二、PWM简介
三、输出比较通道(通用)
四、输出比较通道(高级)
五、输出比较模式
六、PWM基本结构
七、PWM参数计算
八、外设介绍
8.1 舵机
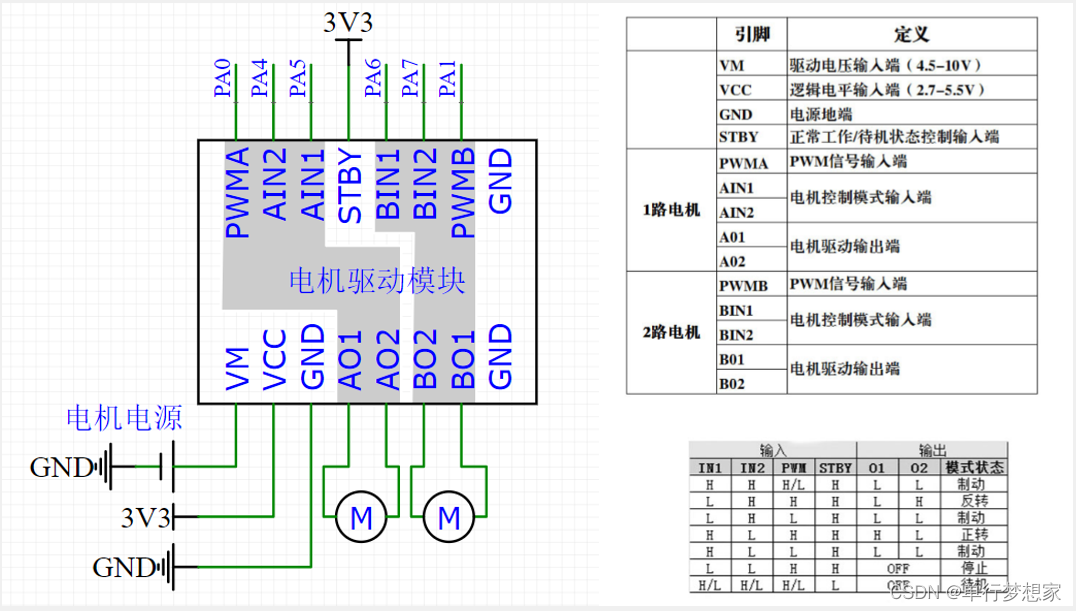
8.2 直流电机及驱动
九、开发步骤
十、输出比较库函数
十一、实验
9.1 PWM驱动LED呼吸灯
9.2 PWM驱动舵机
9.3 PWM驱动直流电机
一、输出比较简介
>OC(Output Compare)输出比较
>输出比较可以通过比较CNT与CCR(捕获/比较寄存器)值的关系,来对输出电平进行置1、置0或翻转的操作,用于输出一定频率和占空比的PWM波形
>每个高级定时器和通用定时器都拥有4个输出比较通道
>高级定时器的前3个通道额外拥有死区生成和互补输出的功能
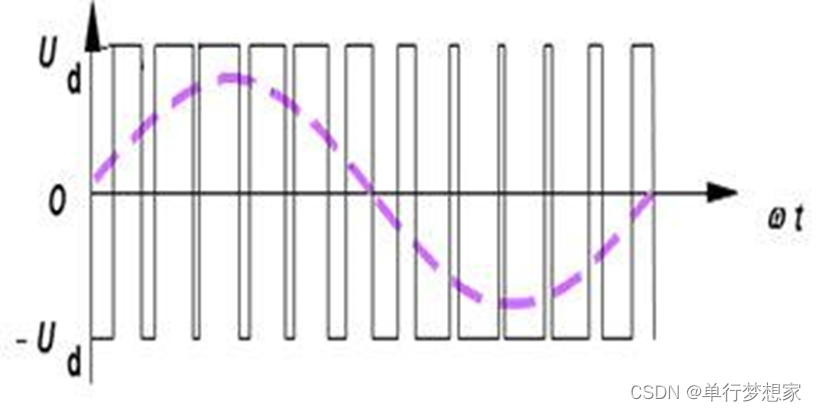
二、PWM简介
>PWM(Pulse Width Modulation)脉冲宽度调制
>在具有惯性的系统中,可以通过对一系列脉冲的宽度进行调制,来等效地获得所需要的模拟参量,常应用于电机控速等领域
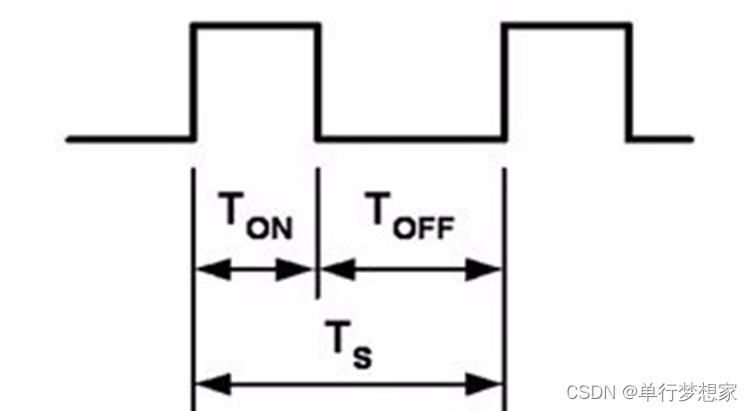
>PWM参数:
频率 = 1 / Ts 占空比 = Ton / Ts 分辨率 = 占空比变化步距
三、输出比较通道(通用)

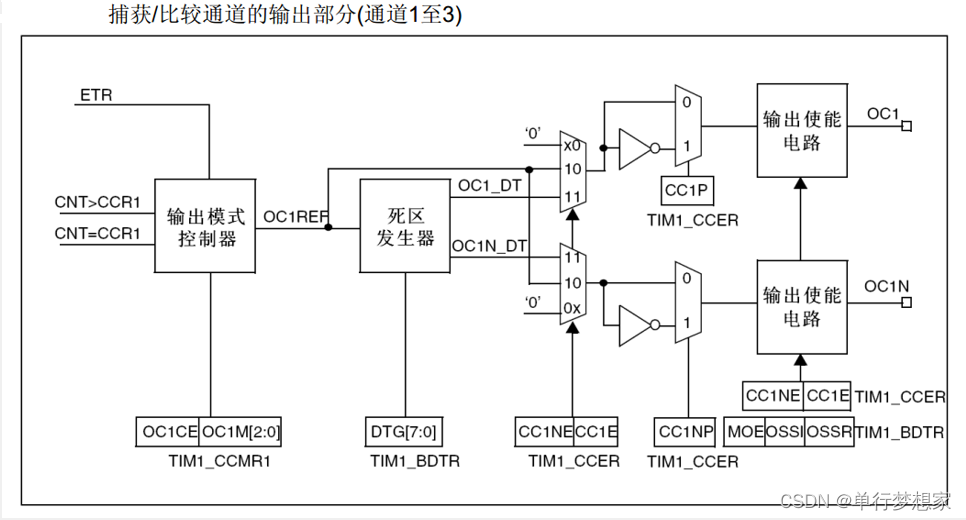
四、输出比较通道(高级)
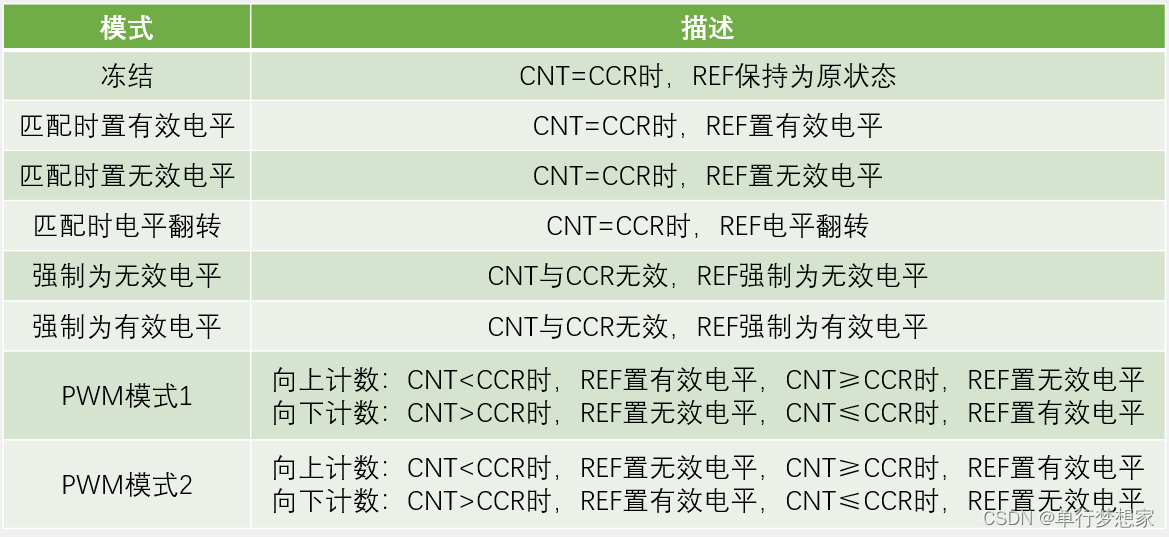
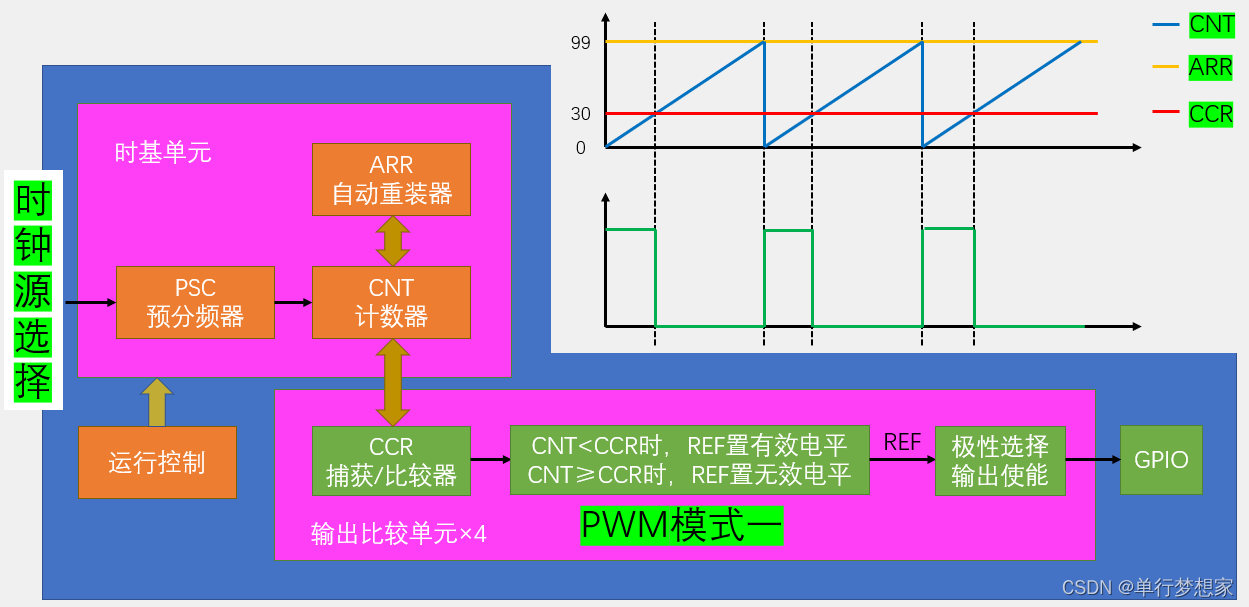
五、输出比较模式
六、PWM基本结构
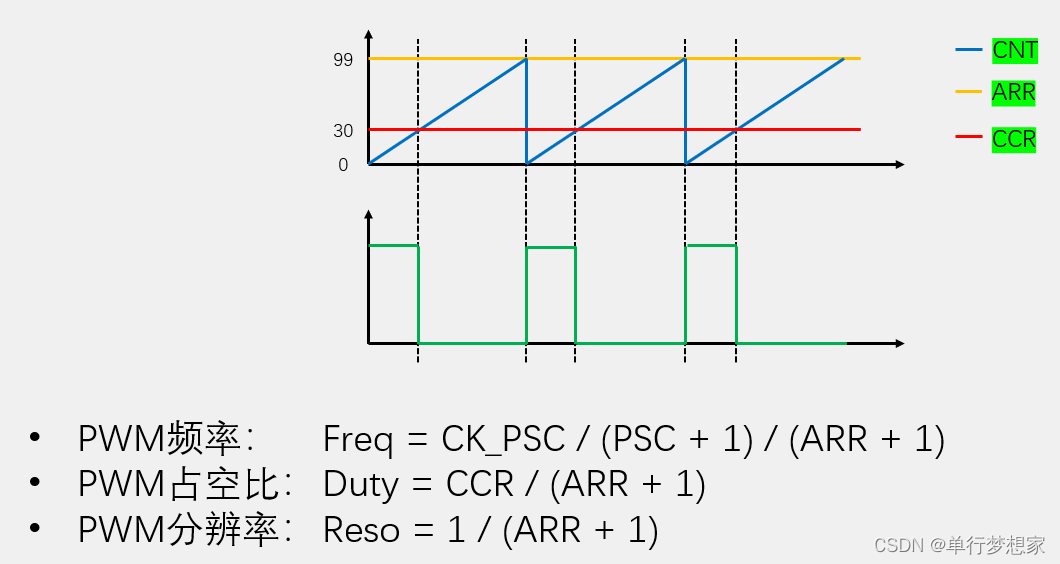
七、PWM参数计算
八、外设介绍
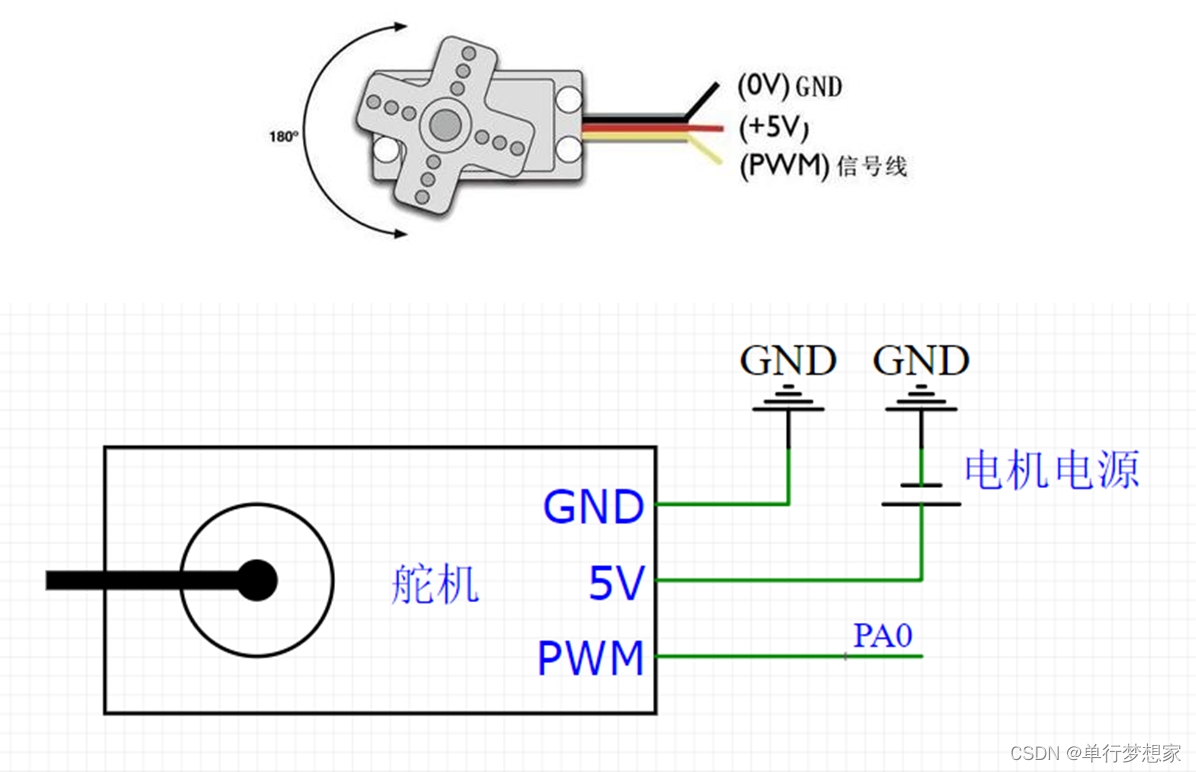
8.1 舵机

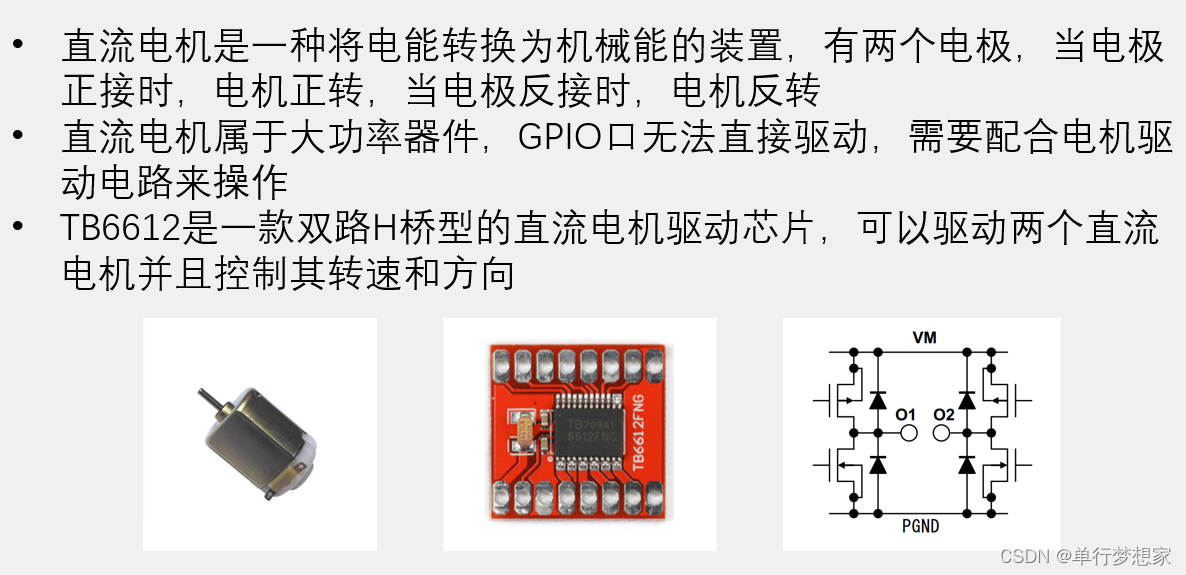
8.2 直流电机及驱动
九、开发步骤
①RCC打开时钟,TIM和GPIO外设的时钟打开
②配置时基单元,包括前面的时钟源选择
③结构体配置输出比较单元(CCR,输出比较模式,极性选择,输出使能)
④配置GPIO,PWM对应GPIO初始化为复用推挽输出
⑤运行控制,启动计数器
十、输出比较库函数
注:标@的为重要,需掌握
@===================输出比较4模块配置函数==============================
void TIM_OC1Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC2Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC3Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC4Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);参数:①定时器;②结构体
=====================================================================
void TIM_OCStructInit(TIM_OCInitTypeDef* TIM_OCInitStruct);
//输出比较结构体赋初值
=====================配置强制输出模式(了解即可)========================
void TIM_ForcedOC1Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC2Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC3Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC4Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);=============配置CCR寄存器的预装功能(影子寄存器)(了解即可)=============
void TIM_OC1PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC2PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC3PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC4PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);=======================配置快速使能(了解即可)==========================
void TIM_OC1FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_OC2FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_OC3FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_OC4FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);=======================外部事件清除REF信号(了解即可)===================
void TIM_ClearOC1Ref(TIM_TypeDef* TIMx, uint16_t TIM_OCClear);
void TIM_ClearOC2Ref(TIM_TypeDef* TIMx, uint16_t TIM_OCClear);
void TIM_ClearOC3Ref(TIM_TypeDef* TIMx, uint16_t TIM_OCClear);
void TIM_ClearOC4Ref(TIM_TypeDef* TIMx, uint16_t TIM_OCClear);=======================单独设置输出比较极性=============================
void TIM_OC1PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
void TIM_OC1NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity);//N高级定时器互补通道的配置
void TIM_OC2PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
void TIM_OC2NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity);
void TIM_OC3PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
void TIM_OC3NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity);
void TIM_OC4PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);=======================单独修改输出使能参数=============================
void TIM_CCxCmd(TIM_TypeDef* TIMx, uint16_t TIM_Channel, uint16_t TIM_CCx);
void TIM_CCxNCmd(TIM_TypeDef* TIMx, uint16_t TIM_Channel, uint16_t TIM_CCxN);=======================单独更改输出比较模式=============================
void TIM_SelectOCxM(TIM_TypeDef* TIMx, uint16_t TIM_Channel, uint16_t TIM_OCMode);
@=====================单独更改CCR寄存器值=============================
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1);
void TIM_SetCompare2(TIM_TypeDef* TIMx, uint16_t Compare2);
void TIM_SetCompare3(TIM_TypeDef* TIMx, uint16_t Compare3);
void TIM_SetCompare4(TIM_TypeDef* TIMx, uint16_t Compare4);==========================补充========================================
void TIM_CtrlPWMOutputs(TIM_TypeDef* TIMx, FunctionalState NewState);
//仅高级定时器使用,在使用高级定时器输出PWM时,需要调用这个函数,使能主输出,否则PWM将不能正常输出
十一、实验
9.1 PWM驱动LED呼吸灯
PWM.c
#include "stm32f10x.h" // Device header/*PWM初始化*/ void PWM_Init(void) {/*一、RCC开启时钟,TIM与GPIO时钟打开*/RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);// /*使用重映射(*_*)*/ // RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); // GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2,ENABLE);//PA0->PA15,部分重映射S // GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);//解除JATG调试GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;//(*_*)GPIO_Pin_15GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);/*二、配置时基单元(时钟源选择和时基单元配置)*/TIM_InternalClockConfig(TIM2);//选择内部时钟TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR自动重装器值TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //PSC预分频器值TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//重复计数器值TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);/*三、配置输出比较单元(CCR的值(捕获/比较器),输出比较模式,极性选择,输出使能)*/TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure);//给结构体所有成员赋初始值(有些用不到但是必须赋值)TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//输出比较模式TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//输出比较的极性TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//输出使能TIM_OCInitStructure.TIM_Pulse = 0;//设置CCRTIM_OC1Init(TIM2,&TIM_OCInitStructure);/*四、配置GPIO,复用推挽输出*///一处已操作/*五、运行控制,启动计数器CNT*/TIM_Cmd(TIM2,ENABLE); }/*封装函数->更改CCR值来改变占空比*/ void PWM_SetCompare1(uint16_t Compare) {TIM_SetCompare1(TIM2,Compare); }PWM.h
#ifndef __PWM_H #define __PWM_Hvoid PWM_Init(void); void PWM_SetCompare1(uint16_t Compare);#endifmain.c
#include "stm32f10x.h" // Device header #include "Delay.h" #include "OLED.h" #include "PWM.h"uint8_t i;int main(void) {OLED_Init();PWM_Init();while (1){//CCR增大,逐渐变亮for (i = 0; i <= 100; i++){PWM_SetCompare1(i);Delay_ms(10);}//CCR减小,逐渐变暗for (i = 0; i <= 100; i++){PWM_SetCompare1(100 - i);Delay_ms(10);}} }
9.2 PWM驱动舵机
实验现象:按下按键,舵机转动固定角度
PWM.c
#include "stm32f10x.h" // Device header/*PWM初始化*/ void PWM_Init(void) {/*一、RCC开启时钟,TIM与GPIO时钟打开*/RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);/*二、配置时基单元(时钟源选择和时基单元配置)*/TIM_InternalClockConfig(TIM2);//选择内部时钟TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInitStructure.TIM_Period = 20000 - 1; //ARR自动重装器值TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //PSC预分频器值TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//重复计数器值TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);/*三、配置输出比较单元(CCR的值(捕获/比较器),输出比较模式,极性选择,输出使能)*/TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure);//给结构体所有成员赋初始值(有些用不到但是必须赋值)TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//输出比较模式TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//输出比较的极性TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//输出使能TIM_OCInitStructure.TIM_Pulse = 0;//设置CCR(500~2500)TIM_OC2Init(TIM2,&TIM_OCInitStructure);/*四、配置GPIO,复用推挽输出*///一处已操作/*五、运行控制,启动计数器CNT*/TIM_Cmd(TIM2,ENABLE); }/*封装函数->更改CCR值来改变占空比*/ void PWM_SetCompare2(uint16_t Compare) {TIM_SetCompare2(TIM2,Compare); }PWM.h
#ifndef __PWM_H #define __PWM_Hvoid PWM_Init(void); void PWM_SetCompare2(uint16_t Compare);#endifServo.c
#include "stm32f10x.h" // Device header #include "PWM.h"//舵机初始化(PWM初始化) void Servo_Init(void) {PWM_Init(); }/* 舵机设置角度 角度:0-180 CCR:500-2500 */ void Servo_SetAngle(float Angle) {PWM_SetCompare2(Angle / 180 * 2000 + 500); }Servo.h
#ifndef __SERVO_H #define __SERVO_Hvoid Servo_Init(void); void Servo_SetAngle(float Angle);#endifKey.c
#include "stm32f10x.h" // Device header #include "Delay.h"//===按键初始化===// void Key_Init(void) {RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_11;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB,&GPIO_InitStructure); }//===获取按键返回码===// uint8_t Key_GetNum(void) {uint8_t KeyNum = 0;if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1) == 0){Delay_ms(20);//消抖while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1) == 0);//如果不松手则卡着Delay_ms(20);KeyNum = 1;} if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_11) == 0){Delay_ms(20);//消抖while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_11) == 0);Delay_ms(20);KeyNum = 2;}return KeyNum; }key.h
#ifndef __KEY_H #define __KEY_Hvoid Key_Init(void); uint8_t Key_GetNum(void);#endifmain.c
#include "stm32f10x.h" // Device header #include "Delay.h" #include "OLED.h" #include "key.h" #include "Servo.h"uint8_t KeyNum; float Angle;int main(void) {OLED_Init();Key_Init();Servo_Init();OLED_ShowString(1,1,"Angle:");while (1){KeyNum = Key_GetNum();if(KeyNum == 1){Angle += 30;if(Angle >180){Angle = 0;}}Servo_SetAngle(Angle);OLED_ShowNum(1,7,Angle,3);} }*OLED显示屏代码请参考本专栏文章STM32-OLED显示屏
9.3 PWM驱动直流电机
实验现象: 按键按下,电机加速,达到最大转速时,再按一下,最大速度反转,按下按键,电机减速
PWM.c
#include "stm32f10x.h" // Device header/*PWM初始化*/ void PWM_Init(void) {/*一、RCC开启时钟,TIM与GPIO时钟打开*/RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);/*二、配置时基单元(时钟源选择和时基单元配置)*/TIM_InternalClockConfig(TIM2);//选择内部时钟TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR自动重装器值TIM_TimeBaseInitStructure.TIM_Prescaler = 36 - 1; //PSC预分频器值TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//重复计数器值TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);/*三、配置输出比较单元(CCR的值(捕获/比较器),输出比较模式,极性选择,输出使能)*/TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure);//给结构体所有成员赋初始值(有些用不到但是必须赋值)TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//输出比较模式TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//输出比较的极性TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//输出使能TIM_OCInitStructure.TIM_Pulse = 0;//设置CCRTIM_OC3Init(TIM2,&TIM_OCInitStructure);/*四、配置GPIO,复用推挽输出*///一处已操作/*五、运行控制,启动计数器CNT*/TIM_Cmd(TIM2,ENABLE); }/*封装函数->更改CCR值来改变占空比*/ void PWM_SetCompare3(uint16_t Compare) {TIM_SetCompare3(TIM2,Compare); }PWM.h
#ifndef __PWM_H #define __PWM_Hvoid PWM_Init(void); void PWM_SetCompare3(uint16_t Compare);#endifMotor.c
#include "stm32f10x.h" // Device header #include "PWM.h"void Motor_Init(void) {RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);PWM_Init(); }/*设置电机速度(-100~100)*/ void Motor_SetSpeed(int8_t Speed) {if(Speed >= 0){GPIO_SetBits(GPIOA,GPIO_Pin_4);GPIO_ResetBits(GPIOA,GPIO_Pin_5);PWM_SetCompare3(Speed);}else{GPIO_SetBits(GPIOA,GPIO_Pin_5);GPIO_ResetBits(GPIOA,GPIO_Pin_4);PWM_SetCompare3(-Speed);} }Motor.h
#ifndef __PWM_H #define __PWM_Hvoid Motor_Init(void); void Motor_SetSpeed(int8_t Speed);#endif*按键与OLED显示屏的代码参考之前实验代码
相关文章:
STM32-TIM定时器输出比较
目录 一、输出比较简介 二、PWM简介 三、输出比较通道(通用) 四、输出比较通道(高级) 五、输出比较模式 六、PWM基本结构 七、PWM参数计算 八、外设介绍 8.1 舵机 8.2 直流电机及驱动 九、开发步骤 十、输出比较库函数…...
《Easy3d+Qt+VTK》学习
《Easy3dQtVTK》学习-1、编译与配置 一、编译二、配置注 一、编译 1、 资源下载:easy3d giuhub 2、解压缩 3、用qt打开CMakeLists.txt即可 4、点击项目,选择debug或者release,图中3处可自行选择,因为我的qt版本是6,…...
多平台展示预约的服装小程序效果如何
线下实体服装店非常多,主要以同城生意为主,但随着电商经济增长,传统线下自然流量变少,商家们会选择线上入驻平台开店获得更多线上用户,包括自建私域小程序等。 而除了直接卖货外,线上展示预约在服装行业也…...
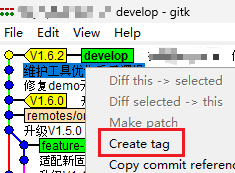
Gti GUI添加标签
通过Git Gui打开项目,通过菜单打开分支历史,我这里是名为"develop"的分支 选中需要打标签的commit,右键-Create tag即可 但貌似无法删除标签,只能通过git bash,本地标签通过git tag -d tagname,…...
高云GW1NSR-4C开发板M3硬核应用
1.M3硬核IP下载:Embedded M3 Hard Core in GW1NS-4C - 科技 - 广东高云半导体科技股份有限公司 (gowinsemi.com.cn) 特别说明:IDE必须是1.9.9及以后版本,1.9.8会导致编译失败(1.9.8下1.1.3版本IP核可用) 以下根据官方…...
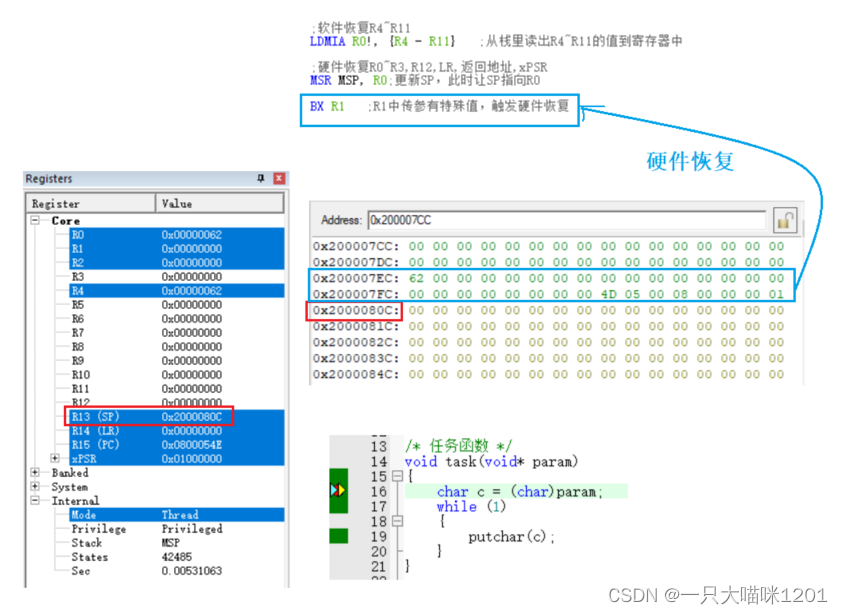
【RTOS学习】模拟实现任务切换 | 寄存器和栈的变化
🐱作者:一只大喵咪1201 🐱专栏:《RTOS学习》 🔥格言:你只管努力,剩下的交给时间! 目录 🏀认识任务切换🏐切换的实质🏐栈中的内容🏐切…...

1.2 轻量级数据交互格式–JSON
对于接口来说,数据交互大部分都是使用的JSON格式,我们这里说的数据,就是我们上一章里讲解HTTP协议的时候,HTTP协议结构里的实体,也就是放在body里。body里存放需要传输的数据,数据是JSON格式,然后通过HTTP协议来传输给接口,接口再以同样的方式给我们返回。理解了这一层…...
 方法)
charCodeAt() 方法
charCodeAt() 是 JavaScript 中用于获取字符串指定位置字符的 Unicode 编码的方法 语法如下: str.charCodeAt(index) str:要获取字符的字符串。index:要获取的字符在字符串中的索引。返回值是一个表示给定索引处字符 Unicode 编码的整数。…...

Flask中redis的配置与使用
注意点: 在__init__.py中需要将redis_store设置成全局变量,这样方便其他文件导入 一、config.py import logging import os from datetime import timedeltafrom redis import StrictRedisclass Config:# 调试信息DEBUG TrueSECRET_KEY os.urandom(3…...

生产者与消费者模型
初识linux之线程同步与生产者消费者模型_生产者线程和消费者线程-CSDN博客 Linux线程(三)—— 多线程(生产者消费者模型、信号量、线程池)-CSDN博客...
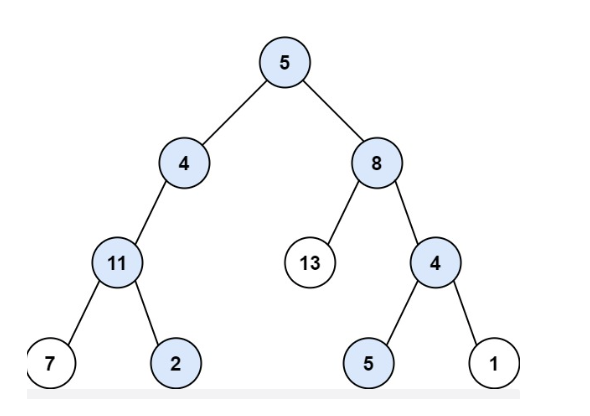
透析回溯的模板
关卡名 认识回溯思想 我会了✔️ 内容 1.复习递归和N叉树,理解相关代码是如何实现的 ✔️ 2.理解回溯到底怎么回事 ✔️ 3.掌握如何使用回溯来解决二叉树的路径问题 ✔️ 回溯可以视为递归的拓展,很多思想和解法都与递归密切相关,在很多…...

浅谈web性能测试
什么是性能测试? web性能应该注意些什么? 性能测试,简而言之就是模仿用户对一个系统进行大批量的操作,得出系统各项性能指标和性能瓶颈,并从中发现存在的问题,通过多方协助调优的过程。而web端的性能测试…...
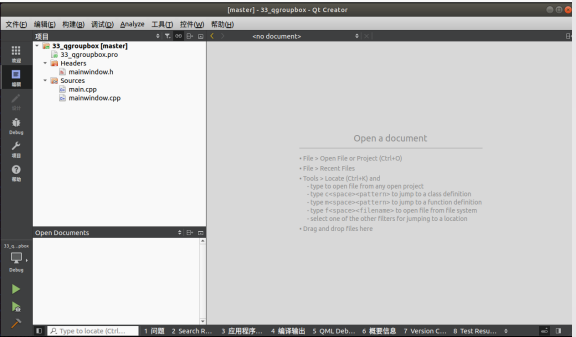
Qt 容器QGroupBox带有标题的组框框架
控件简介 QGroupBox 小部件提供一个带有标题的组框框架。一般与一组或者是同类型的部件一起使用。教你会用,怎么用的强大就靠你了靓仔、靓妹。 用法示例 例 qgroupbox,组框示例(难度:简单),使用 3 个 QRadioButton 单选框按钮,与QVBoxLayout(垂直布局)来展示组框的…...
Linux系统解决“Key was rejected by service”
Linux系统下加载驱动模块出现如上错误提示的原因为:此驱动未经过签名。 方法一、关闭Secure Boot 如果是物理机,需要开机进入BIOS,找到“Secure Boot”的选项,然后关闭。 如果是虚拟机,可以打开虚拟设置,…...

【C++ Primer Plus学习记录】字符函数库cctype
C从C语言继承了一个与字符相关的、非常方便的函数软件包,它可以简化诸如确定字符是否为大写字母、数字、标点符号等工作,这些函数的原型是在头文件cctype中定义的。 cctype中的字符函数 函数名称返回值isalnum()如果参数是字母或数字,该函数返…...

C# WebSocket简单使用
文章目录 前言Fleck调试工具初始化简单使用 前言 最近接到了一个需求,需要网页实现上位机的功能。那就对数据传输的实时性要求很高。那就只能用WebSocket了。这里简单说一下我的WebSocket如何搭建 Fleck C# WebSocket(Fleck) 客户端:html Winfrom Fleck Github官网…...

uni-app 一些实用的页面模板
时间倒计时 <!-- 时间倒计时 --> <template><view class"container"><view class"flex-row time-box"><view class"time-item">{{ laveTimeList[0] }}</view><text>天</text><view class&qu…...
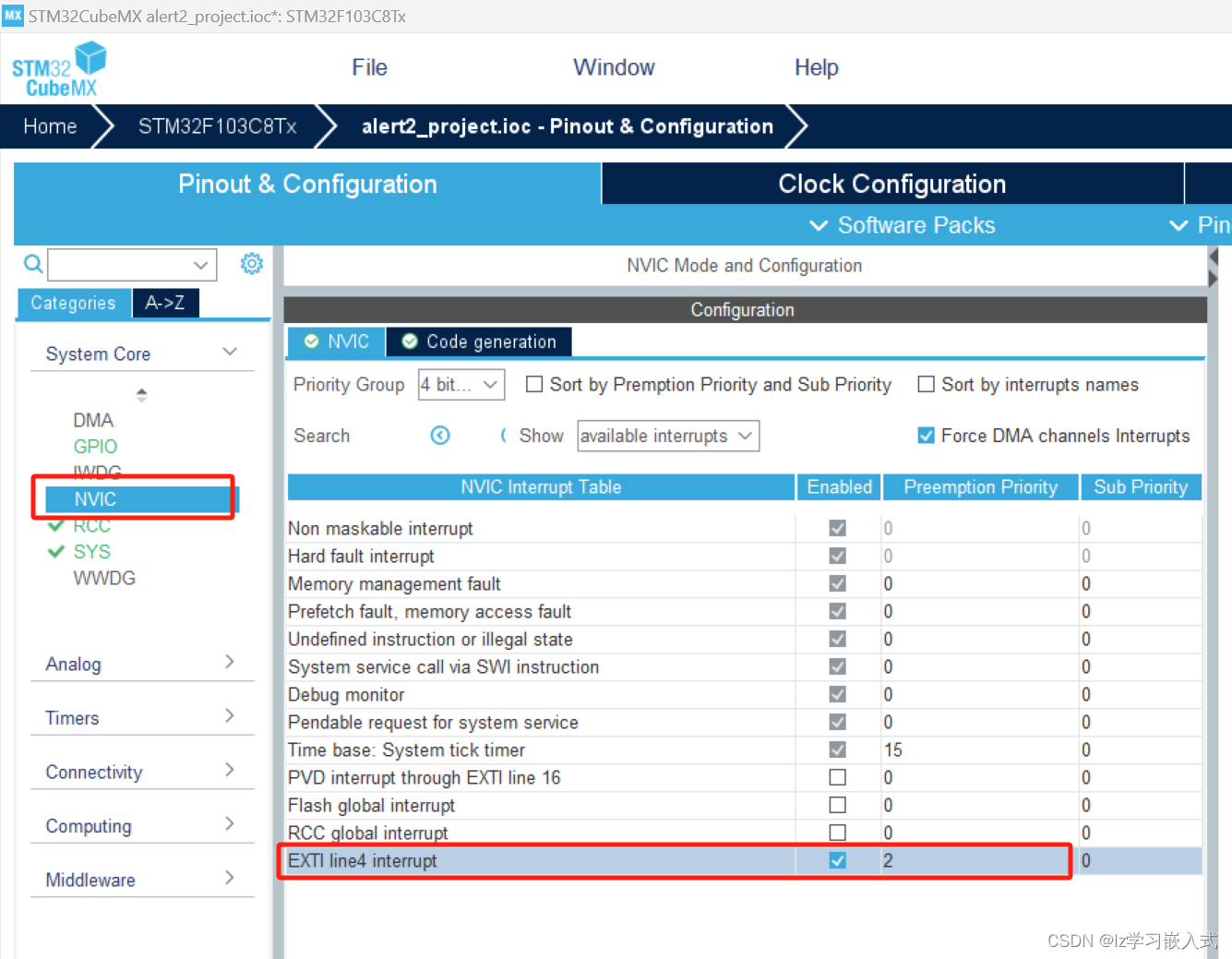
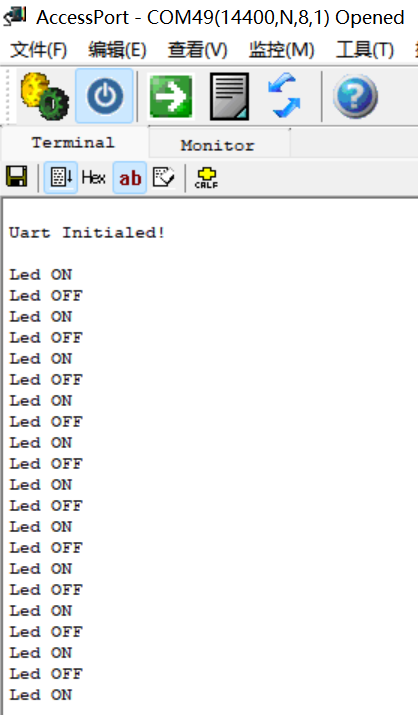
STM32——震动传感器点亮LED灯
震动传感器简单介绍 若产品不震动,模块上的 DO 口输出高电平; 若产品震动,模块上的 DO 口输出低电平,D0-LED绿色指示灯亮。 震动传感器与STM32的接线 编程实现 需求:当震动传感器接收到震动信号时,使用中断…...

使用 Timm 库替换 YOLOv8 主干网络 | 1000+ 主干融合YOLOv8
文章目录 前言版本差异说明替换方法parse_moedl( ) 方法_predict_once( ) 方法修改 yaml ,加载主干论文引用timm 是一个包含最先进计算机视觉模型、层、工具、优化器、调度器、数据加载器、数据增强和训练/评估脚本的库。 该库内置了 700 多个预训练模型,并且设计灵活易用。…...
?)
PHP中什么是闭包(Closure)?
在PHP中,闭包(Closure)是一种匿名函数,它可以作为变量传递、作为参数传递给其他函数,或者被作为函数的返回值。闭包可以在定义时捕获上下文中的变量,并在以后的执行中使用这些变量。闭包在处理回调函数、事…...

告别卡顿与隐私担忧:用Docker Compose在1核1G VPS上部署高性能RustDesk私有服务器
在1核1G VPS上构建高性能RustDesk私有化服务的完整指南 远程协作已成为现代工作流中不可或缺的一环,而数据隐私和连接稳定性则是技术爱好者最关注的核心问题。开源远程桌面解决方案RustDesk以其轻量级架构和自托管能力,为追求完全控制权的用户提供了理想…...

低查重AI教材生成利器,AI写教材工具让你1周完成40万字书稿!
在撰写教材的过程中,总是难以避免“慢节奏”的所有坑。当框架和资料都已准备妥当时,却常常因为撰写内容而停滞不前——一句话反复斟酌半小时,仍觉得不够准确;章节间的衔接更是让人绞尽脑汁,找不到合适的表达方式&#…...

基于Emissaries框架构建多AI智能体协作系统:从原理到实践
1. 项目概述:一个基于AI的智能体协作框架最近在开源社区里,一个名为muinyc/emissaries的项目引起了我的注意。乍一看这个名字,你可能会联想到“使者”或“特使”,这其实非常贴切地揭示了它的核心定位。简单来说,Emissa…...

机器学习中的视觉与自然语言处理
一两个月前看了李飞飞老师的自传,看第一页就觉得 这是对A国的表白。当然也会遗憾,希望她小时候遇到的老师是更好的老师,她家周围遇到的人是更好的人。这是概率问题,在过去可能不够好今天会更好。 重点是当我看到她在思考智能的起源…...

STM32 的IIC通信接收和发送详解
STM32 的 IIC 通信:IIC 接收和发送详解 1. 前言 IIC,也常写作 I2C,是单片机开发中非常常用的一种同步串行通信协议。 在 STM32 项目中,很多外设模块都会使用 IIC 通信,例如: OLED 显示屏;EEPROM…...

MCP服务器构建指南:安全连接AI与外部工具的核心架构与实战
1. 项目概述:MCP服务器生态的构建者如果你最近在关注AI智能体开发,尤其是围绕Claude、Cursor这类工具的生态,那么“MCP”这个词大概率已经在你耳边出现了无数次。ViswaSrimaan/mcp_servers这个项目,正是这个新兴浪潮中的一个关键基…...

Linux后台任务日志管理实战:从nohup.out到更专业的systemd与日志轮转
Linux后台任务日志管理实战:从nohup.out到更专业的systemd与日志轮转 在Linux服务器运维中,后台任务管理是每个开发者都会遇到的场景。想象一下这样的情形:你使用nohup启动了一个Web服务,几个月后突然收到磁盘空间告警࿰…...
与并网联合仿真)
手把手教你学Simulink——新能源并网逆变器的最大功率点跟踪(MPPT)与并网联合仿真
目录 手把手教你学Simulink——新能源并网逆变器的最大功率点跟踪(MPPT)与并网联合仿真 一、背景与挑战 1.1 为什么新能源并网离不开 MPPT? 1.2 核心痛点与设计目标 二、系统架构与核心控制推导 2.1 整体架构:DC 级联的“能量接力棒” 2.2 核心数学推导:看穿 MPPT 的…...

Space Thumbnails:Windows资源管理器的终极3D模型预览解决方案
Space Thumbnails:Windows资源管理器的终极3D模型预览解决方案 【免费下载链接】space-thumbnails Generates preview thumbnails for 3D model files. Provide a Windows Explorer extensions that adds preview thumbnails for 3D model files. 项目地址: https…...
)
数据结构第7章图:课后习题全解析(选择题+综合题+算法设计题,含DFS/BFS遍历、拓扑排序、最小生成树)
第7章 图 课后习题一、单项选择题1. 设无向图的顶点个数为 n,则该图最多有(B )条边。A. n−1 B. n(n−1)/2 C. n(n1)/2 D. n(n−1)解析: 无向完全图边数最多,每对顶点之间有一条边,总边数为 n(n−1)/2。2. …...