高云GW1NSR-4C开发板M3硬核应用
1.M3硬核IP下载:Embedded M3 Hard Core in GW1NS-4C - 科技 - 广东高云半导体科技股份有限公司 (gowinsemi.com.cn)
特别说明:IDE必须是1.9.9及以后版本,1.9.8会导致编译失败(1.9.8下1.1.3版本IP核可用)
以下根据官方提供的开发包,在GW1NSR-4C开发板上实现8个led点灯及串口通信测试。
2.FPGA综合:
解压文件,打开\Gowin_EMPU(GW1NS-4C)_V1.2\solution\running_in_sram_from_emb_userflash\ref_design\FPGA_RefDesign\DK_START_GW1NSR4C_QN48P_V1.1\gowin_empu下工程,添加器件GW1NSR-4C,正常的话应该可以综合(Synthesize)。
由于板卡实际晶振为27M,且需要点亮8个led,串口引脚也需要重新配置,故作出一定修改。修改gowin_pllvr.v文件,相关参数更改如下:
defparam pllvr_inst.FCLKIN = "27";
defparam pllvr_inst.DYN_IDIV_SEL = "false";
defparam pllvr_inst.IDIV_SEL = 8;
defparam pllvr_inst.DYN_FBDIV_SEL = "false";
defparam pllvr_inst.FBDIV_SEL = 25;
defparam pllvr_inst.DYN_ODIV_SEL = "false";
defparam pllvr_inst.ODIV_SEL = 8;
defparam pllvr_inst.PSDA_SEL = "0000";
defparam pllvr_inst.DYN_DA_EN = "true";
defparam pllvr_inst.DUTYDA_SEL = "1000";
defparam pllvr_inst.CLKOUT_FT_DIR = 1'b1;
defparam pllvr_inst.CLKOUTP_FT_DIR = 1'b1;
defparam pllvr_inst.CLKOUT_DLY_STEP = 0;
defparam pllvr_inst.CLKOUTP_DLY_STEP = 0;
defparam pllvr_inst.CLKFB_SEL = "internal";
defparam pllvr_inst.CLKOUT_BYPASS = "false";
defparam pllvr_inst.CLKOUTP_BYPASS = "false";
defparam pllvr_inst.CLKOUTD_BYPASS = "false";
defparam pllvr_inst.DYN_SDIV_SEL = 2;
defparam pllvr_inst.CLKOUTD_SRC = "CLKOUT";
defparam pllvr_inst.CLKOUTD3_SRC = "CLKOUT";
defparam pllvr_inst.DEVICE = "GW1NSR-4C";修改gowin_empu_template.v文件:
//sys_clk max 78MHz
//GPIO
//UART0`resetallmodule Gowin_EMPU_Template (sys_clk,reset_n,led,uart0_rxd,uart0_txd
);input sys_clk;
input reset_n;//GPIO
output [7:0] led;//UART0
input uart0_rxd;
output uart0_txd;/*--------------------Gowin_EMPU_Top---------------------------*/
wire mclk; //mcu clock
wire clkin = sys_clk;
wire [7:0] gpioout_o;
wire [15:0] gpioouten_o;//MCU system clock = 78MHz
Gowin_PLLVR u_Gowin_PLLVR(.clkout(mclk), //MCU 78MHz.clkin(clkin) //input clkin 27MHz
);Gowin_EMPU_Top u_Gowin_EMPU_Top (.sys_clk(mclk),.reset_n(reset_n),//GPIO.gpioin(16'h0000),.gpioout({gpioout_o,led}),.gpioouten(gpioouten_o),//UART0.uart0_rxd(uart0_rxd),.uart0_txd(uart0_txd)
);endmodule修改引脚约束文件:
//MCU system clock
IO_LOC "sys_clk" 22;//F_CLK
IO_PORT "sys_clk" IO_TYPE=LVCMOS18;//MCU system reset
IO_LOC "reset_n" 23;//KEY2
IO_PORT "reset_n" IO_TYPE=LVCMOS25;//LED
IO_LOC "led[7]" 34;
IO_PORT "led[7]" IO_TYPE=LVCMOS25;
IO_LOC "led[6]" 35;
IO_PORT "led[6]" IO_TYPE=LVCMOS25;
IO_LOC "led[5]" 31;
IO_PORT "led[5]" IO_TYPE=LVCMOS25;
IO_LOC "led[4]" 32;
IO_PORT "led[4]" IO_TYPE=LVCMOS25;
IO_LOC "led[3]" 29;
IO_PORT "led[3]" IO_TYPE=LVCMOS25;
IO_LOC "led[2]" 30;
IO_PORT "led[2]" IO_TYPE=LVCMOS25;
IO_LOC "led[1]" 27;
IO_PORT "led[1]" IO_TYPE=LVCMOS25;
IO_LOC "led[0]" 28;
IO_PORT "led[0]" IO_TYPE=LVCMOS25;//UART0
IO_LOC "uart0_rxd" 45;//UART_RXD
IO_LOC "uart0_txd" 43;//UART_TXD
IO_PORT "uart0_rxd" IO_TYPE=LVCMOS25;
IO_PORT "uart0_txd" IO_TYPE=LVCMOS25;4.MCU工程:
打开\Gowin_EMPU(GW1NS-4C)_V1.2\ref_design\MCU_RefDesign\Keil_RefDesign\uart\PROJECT下的Keil工程,在此基础上修改main.c文件,波特率改为14400bps。:
/* Includes ------------------------------------------------------------------*/
#include "gw1ns4c.h"
#include <stdio.h>
/* Declarations ------------------------------------------------------------------*/
void UartInit(void);
void delay_ms(__IO uint32_t delay_ms);
void GPIOInit(void);
/* Functions ------------------------------------------------------------------*/
int main()
{
SystemInit(); //Initializes system
UartInit(); //Initializes UART0
GPIOInit(); //Initializes GPIO
printf("\nUart Initialed!\r\n");
printf("\n");
while(1)
{
GPIO_ResetBit(GPIO0, GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7);//|GPIO_Pin_1|GPIO_Pin_2); //LED on
printf("Led ON\r\n");
delay_ms(1000);
GPIO_SetBit(GPIO0, GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7);//|GPIO_Pin_1|GPIO_Pin_2); //LED off
printf("Led OFF\r\n");
delay_ms(1000);
}
}
//Initializes UART0
void UartInit(void)
{
UART_InitTypeDef UART_InitStruct;
UART_InitStruct.UART_Mode.UARTMode_Tx = ENABLE;
UART_InitStruct.UART_Mode.UARTMode_Rx = ENABLE;
UART_InitStruct.UART_Int.UARTInt_Tx = DISABLE;
UART_InitStruct.UART_Int.UARTInt_Rx = DISABLE;
UART_InitStruct.UART_Ovr.UARTOvr_Tx = DISABLE;
UART_InitStruct.UART_Ovr.UARTOvr_Rx = DISABLE;
UART_InitStruct.UART_Hstm = DISABLE;
UART_InitStruct.UART_BaudRate = 14400;//Baud Rate
UART_Init(UART0,&UART_InitStruct);
}
//delay ms
void delay_ms(__IO uint32_t delay_ms)
{
for(delay_ms=(SystemCoreClock/16000)*delay_ms; delay_ms != 0; delay_ms--);
}
//Initializes GPIO
void GPIOInit(void)
{
GPIO_InitTypeDef GPIO_InitType;
GPIO_InitType.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitType.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitType.GPIO_Int = GPIO_Int_Disable;
GPIO_Init(GPIO0,&GPIO_InitType);
}
如下图,在编译时,Option for Target 'uart'->User->After Build/Rebuild->Run#1处的D:\Keil_v5目录,根据个人实际进行修改,例如本人的为E:\Keil_v5\。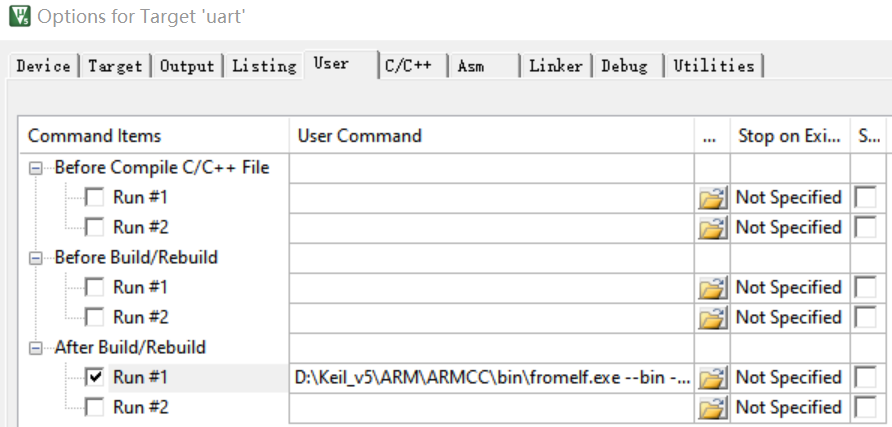 5.下载:
5.下载:
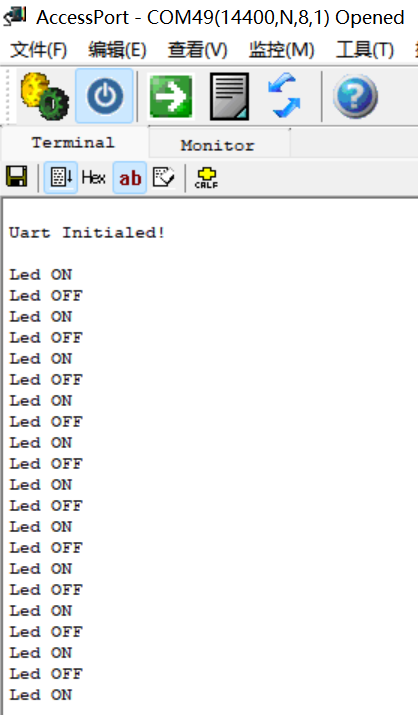
选择“MCU Mode”,如下图,需要两个文件:“.fs”FPGA文件和".bin"单片机文件。完成后需要长按Reset按键(即核心板上靠近中间的按键,23引脚)。分别接上led和USB-TTL,可以看出8个led按照约1秒的间隔时间闪烁,串口调试助手则交替收到“Led ON”和“Led OFF”。

6.完整的工程文件:
https://download.csdn.net/download/weixin_41784968/88614259
https://download.csdn.net/download/weixin_41784968/88614264
相关文章:
高云GW1NSR-4C开发板M3硬核应用
1.M3硬核IP下载:Embedded M3 Hard Core in GW1NS-4C - 科技 - 广东高云半导体科技股份有限公司 (gowinsemi.com.cn) 特别说明:IDE必须是1.9.9及以后版本,1.9.8会导致编译失败(1.9.8下1.1.3版本IP核可用) 以下根据官方…...
【RTOS学习】模拟实现任务切换 | 寄存器和栈的变化
🐱作者:一只大喵咪1201 🐱专栏:《RTOS学习》 🔥格言:你只管努力,剩下的交给时间! 目录 🏀认识任务切换🏐切换的实质🏐栈中的内容🏐切…...

1.2 轻量级数据交互格式–JSON
对于接口来说,数据交互大部分都是使用的JSON格式,我们这里说的数据,就是我们上一章里讲解HTTP协议的时候,HTTP协议结构里的实体,也就是放在body里。body里存放需要传输的数据,数据是JSON格式,然后通过HTTP协议来传输给接口,接口再以同样的方式给我们返回。理解了这一层…...
 方法)
charCodeAt() 方法
charCodeAt() 是 JavaScript 中用于获取字符串指定位置字符的 Unicode 编码的方法 语法如下: str.charCodeAt(index) str:要获取字符的字符串。index:要获取的字符在字符串中的索引。返回值是一个表示给定索引处字符 Unicode 编码的整数。…...

Flask中redis的配置与使用
注意点: 在__init__.py中需要将redis_store设置成全局变量,这样方便其他文件导入 一、config.py import logging import os from datetime import timedeltafrom redis import StrictRedisclass Config:# 调试信息DEBUG TrueSECRET_KEY os.urandom(3…...

生产者与消费者模型
初识linux之线程同步与生产者消费者模型_生产者线程和消费者线程-CSDN博客 Linux线程(三)—— 多线程(生产者消费者模型、信号量、线程池)-CSDN博客...
透析回溯的模板
关卡名 认识回溯思想 我会了✔️ 内容 1.复习递归和N叉树,理解相关代码是如何实现的 ✔️ 2.理解回溯到底怎么回事 ✔️ 3.掌握如何使用回溯来解决二叉树的路径问题 ✔️ 回溯可以视为递归的拓展,很多思想和解法都与递归密切相关,在很多…...

浅谈web性能测试
什么是性能测试? web性能应该注意些什么? 性能测试,简而言之就是模仿用户对一个系统进行大批量的操作,得出系统各项性能指标和性能瓶颈,并从中发现存在的问题,通过多方协助调优的过程。而web端的性能测试…...
Qt 容器QGroupBox带有标题的组框框架
控件简介 QGroupBox 小部件提供一个带有标题的组框框架。一般与一组或者是同类型的部件一起使用。教你会用,怎么用的强大就靠你了靓仔、靓妹。 用法示例 例 qgroupbox,组框示例(难度:简单),使用 3 个 QRadioButton 单选框按钮,与QVBoxLayout(垂直布局)来展示组框的…...
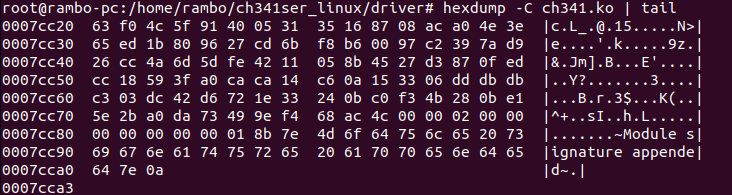
Linux系统解决“Key was rejected by service”
Linux系统下加载驱动模块出现如上错误提示的原因为:此驱动未经过签名。 方法一、关闭Secure Boot 如果是物理机,需要开机进入BIOS,找到“Secure Boot”的选项,然后关闭。 如果是虚拟机,可以打开虚拟设置,…...

【C++ Primer Plus学习记录】字符函数库cctype
C从C语言继承了一个与字符相关的、非常方便的函数软件包,它可以简化诸如确定字符是否为大写字母、数字、标点符号等工作,这些函数的原型是在头文件cctype中定义的。 cctype中的字符函数 函数名称返回值isalnum()如果参数是字母或数字,该函数返…...

C# WebSocket简单使用
文章目录 前言Fleck调试工具初始化简单使用 前言 最近接到了一个需求,需要网页实现上位机的功能。那就对数据传输的实时性要求很高。那就只能用WebSocket了。这里简单说一下我的WebSocket如何搭建 Fleck C# WebSocket(Fleck) 客户端:html Winfrom Fleck Github官网…...

uni-app 一些实用的页面模板
时间倒计时 <!-- 时间倒计时 --> <template><view class"container"><view class"flex-row time-box"><view class"time-item">{{ laveTimeList[0] }}</view><text>天</text><view class&qu…...
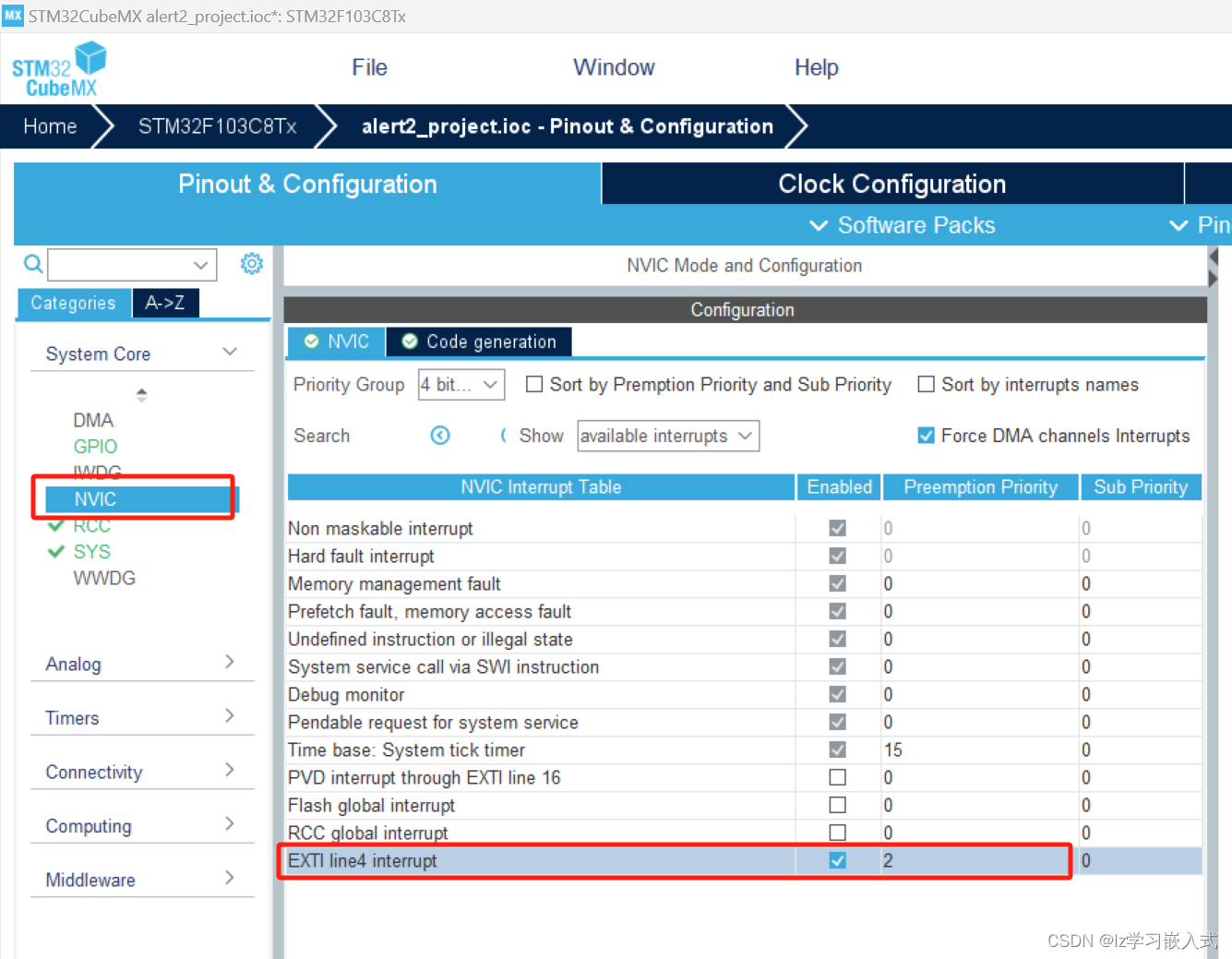
STM32——震动传感器点亮LED灯
震动传感器简单介绍 若产品不震动,模块上的 DO 口输出高电平; 若产品震动,模块上的 DO 口输出低电平,D0-LED绿色指示灯亮。 震动传感器与STM32的接线 编程实现 需求:当震动传感器接收到震动信号时,使用中断…...

使用 Timm 库替换 YOLOv8 主干网络 | 1000+ 主干融合YOLOv8
文章目录 前言版本差异说明替换方法parse_moedl( ) 方法_predict_once( ) 方法修改 yaml ,加载主干论文引用timm 是一个包含最先进计算机视觉模型、层、工具、优化器、调度器、数据加载器、数据增强和训练/评估脚本的库。 该库内置了 700 多个预训练模型,并且设计灵活易用。…...
?)
PHP中什么是闭包(Closure)?
在PHP中,闭包(Closure)是一种匿名函数,它可以作为变量传递、作为参数传递给其他函数,或者被作为函数的返回值。闭包可以在定义时捕获上下文中的变量,并在以后的执行中使用这些变量。闭包在处理回调函数、事…...

boost::graph学习
boost::graph API简单小结 boost::graph是boost为图算法提供的API,简单易用。 API说明 boost::add_vertex 创建一个顶点。 boost::add_edge 创建一条边。 boost::edges 获取所有的边。 boost::vertices 获取所有的顶点。 graph.operator[vertex_descriptor] 获…...

【C语言:动态内存管理】
文章目录 前言1.malloc2.free3.calloc4.realloc5.动态内存常见错误6.动态内存经典笔试题分析7.柔性数组8.C/C中的内存区域划分 前言 文章的标题是动态内存管理,那什么是动态内存管理?为什么有动态内存管理呢? 回顾一下以前学的知识ÿ…...

【Python基础】迭代器
文章目录 [toc]什么是迭代可迭代对象判断数据类型是否是可迭代类型 迭代器对可迭代对象进行迭代的本质获取可迭代对象的迭代器通过迭代器获取数据StopIteration异常 自定义迭代器__iter__()方法__next__()方法判断数据类型是否是可迭代类型自定义迭代器案例分离模式整合模式 fo…...
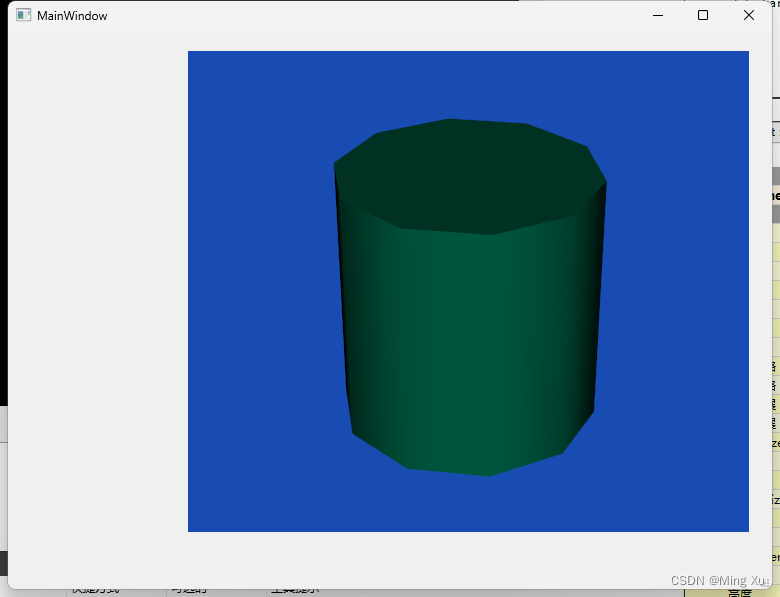
QVTK 可视化
#ifndef MAINWINDOW_H #define MAINWINDOW_H#include <QMainWindow>#include <vtkNew.h> // 智能指针 #include <QVTKOpenGLNativeWidget.h> #include <vtkCylinderSource.h> // 圆柱#include <vtkPolyDataMapper.h&g…...

从PyAutoGUI到OpenClaw:构建健壮桌面自动化的状态驱动技能库
1. 项目概述:当自动化脚本拥有“鹰爪”最近在GitHub上看到一个挺有意思的项目,叫Ikaros-521/openclaw-pyautogui-skill。光看名字,就透着一股“硬核”和“实用”的气息。Ikaros(伊卡洛斯)是希腊神话里那位用蜡和羽毛造…...

基于SpringBoot的广西特色水果电商平台的设计与实现
本课题的选题依据及研究意义 一、选题依据和意义 (一)选题依据 随着互联网经济的深入发展,电子商务在推动全球经济发展中发挥了重要作用。其中生鲜电商已成为农产品销售的重要渠道。广西作为我国热带水果的重要产区,对其传统水果产…...

FakeLocation终极指南:三分钟掌握Android应用级虚拟定位黑科技
FakeLocation终极指南:三分钟掌握Android应用级虚拟定位黑科技 【免费下载链接】FakeLocation Xposed module to mock locations per app. 项目地址: https://gitcode.com/gh_mirrors/fak/FakeLocation 你是否曾想过在手机上"瞬间移动"到世界任何角…...

魔兽争霸3 WarcraftHelper:让你的经典游戏在2026年焕发新生
魔兽争霸3 WarcraftHelper:让你的经典游戏在2026年焕发新生 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为魔兽争霸3的画面拉伸、帧…...


SillyTavern角色卡片系统:打造属于你的AI灵魂伴侣
SillyTavern角色卡片系统:打造属于你的AI灵魂伴侣 【免费下载链接】SillyTavern LLM Frontend for Power Users. 项目地址: https://gitcode.com/GitHub_Trending/si/SillyTavern 你是否曾经幻想过,能有一个真正理解你、陪伴你的AI伙伴࿱…...

瑞萨RL78/G16开发板与EZ-CUBE3仿真器连接调试全攻略
1. 项目概述与核心价值 最近在折腾瑞萨的RL78系列MCU,手头正好有一块RL78/G16的快速原型开发板和一个EZ-CUBE3仿真器。对于刚接触瑞萨生态的朋友来说,如何把这套硬件正确地连接起来,并成功跑通第一个LED闪烁程序,往往是入门路上的…...

电波流速仪
电波流速仪主打轻量化便携设计,适配单人独立作业。整机重量小于1kg,机身轻巧便携、握持舒适,长时间户外作业无负担。支持手持直接测量与标配三脚架固定测量两种模式,可灵活适配沟渠、河道、险滩、闸口等不同作业环境,既…...

智慧能耗管理系统:嵌入式工控机在工业节能中的核心应用
1. 工厂能耗管理的痛点与智能化转型契机 在制造业摸爬滚打十几年,我见过太多工厂在能耗管理上的“粗放式”经营。电费单是每个月固定的大额支出,但具体电用在了哪里,哪个车间、哪条产线、甚至哪台设备是“电老虎”,很多时候都是一…...

3步实现微信聊天记录永久备份:WeChatExporter完整解决方案
3步实现微信聊天记录永久备份:WeChatExporter完整解决方案 【免费下载链接】WeChatExporter 一个可以快速导出、查看你的微信聊天记录的工具 项目地址: https://gitcode.com/gh_mirrors/wec/WeChatExporter 你是否曾因手机丢失或系统更新而永远丢失珍贵的微信…...