STM32之PWM
PWM
PWM,英文名Pulse Width Modulation,是脉冲宽度调制缩写,它是通过对一系列脉冲的宽度进行调制,等效出所需要的波形(包含形状以及幅值),对模拟信号电平进行数字编码,也就是说通过调节占空比的变化来调节信号、能量等的变化,占空比就是指在一个周期内,信号处于有效电平的时间占据整个信号周期的百分比。
PWM是脉冲宽度调制。
有效电平持续的时间占整个周期的百分比称为占空比。
PWM的输出模式
可以修改TIMx_CCRx寄存器的值来修改占空比。
PWM模式1
在向上计数时,一旦CNT<CCRx 时输出为有效电平,否则为无效电平。

在向下计数时,一旦CNT>CCRx 时输出为无效电平,否则为有效电平。

PWM模式2
在向上计数时,一旦CNT<CCRx 时输出为无效电平,否则为有效电平。

在向下计数时,一旦CNT>CCRx 时输出为有效电平,否则为无效电平。

STM32F103C8T6的PWM资源
高级定时器(TIM1):7路的PWM
通用定时器(TIM2~TIM4):每个定时器各4路的PWM
PWM的周期和频率
周期是频率的倒数,如驱动sg90舵机时PWM信号的频率大概为50HZ,即周期为20ms(Tout,也就是定时时间)

PWM实现呼吸灯
利用调节PWM的占空比大小来实现呼吸灯,PWM周期为0.5ms即频率为2000HZ
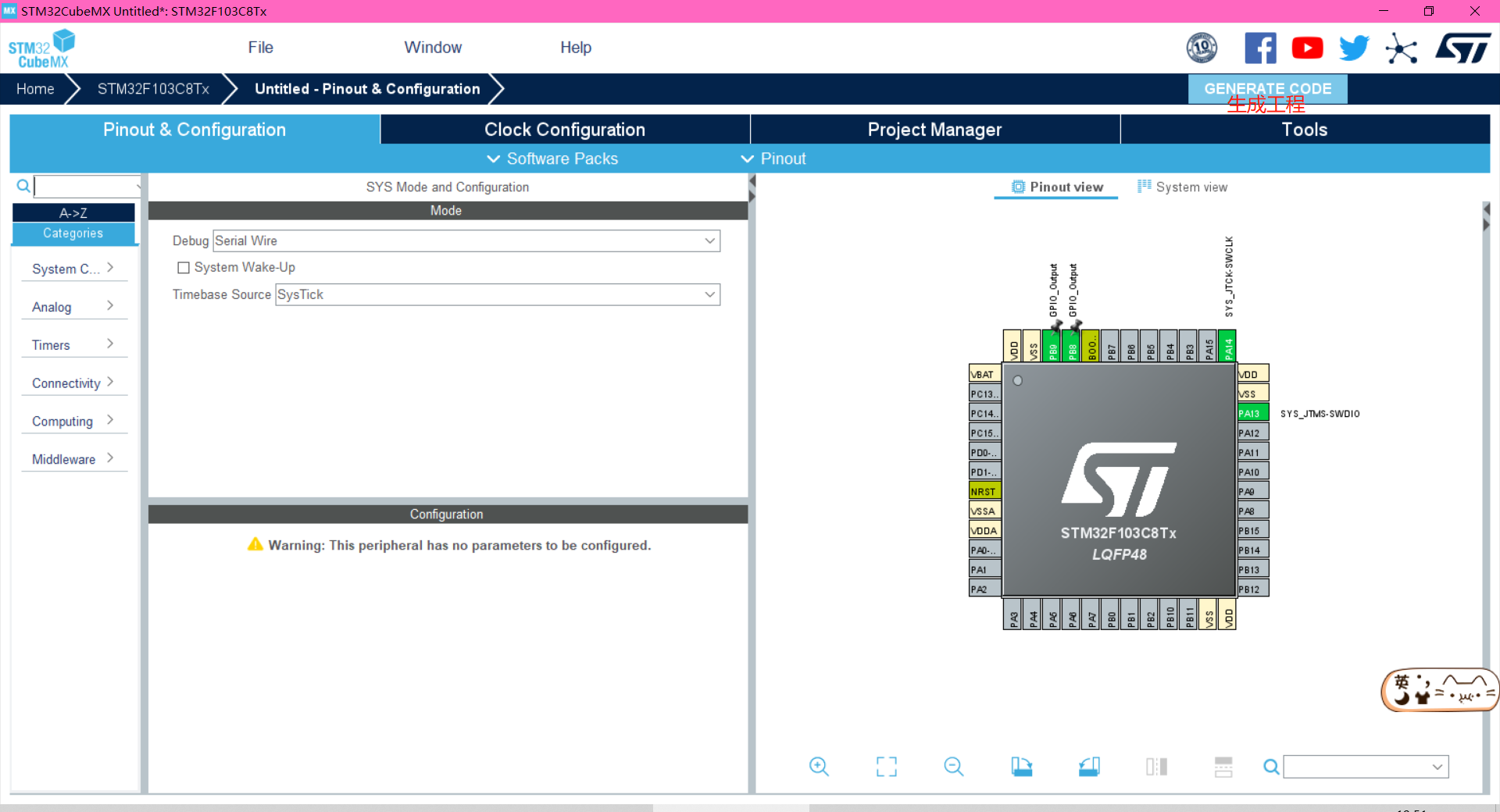
使用STM32CubeMX创建工程
配置SYS

配置RCC


配置PWM
翻看使用手册,查看LED1使用哪个PWM

选择定时器4,打开时钟来源选择中间时钟,选择通道三输出PWM

配置定时方式,定时时间为0.5ms(即PSC为71,ARR为499),PWM的相关信息(选择PWM模式1)
由于需要手动改变PWM的占空比,所以设置为0
由于点亮LED1的有效电平为低电平,所以PWM的极性选择LOW


配置工程名称、工程路径

选择固件库

生成工程
main函数编写
在main函数中打开某个PWM(HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_3);)
修改某个PWM的占空比,即修改TIMx_CCRx寄存器的值(__HAL_TIM_SetCompare(&htim4,TIM_CHANNEL_3,pwmVal);)
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2023 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes *//* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 */uint16_t pwmVal = 0; //占空比大小(CCRx的大小)uint8_t direction = 1; //呼吸灯方向: 1. 越来越亮 2. 越来越暗/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_TIM4_Init();/* USER CODE BEGIN 2 *///初始化之后,打开引脚PB8的PWM,即定时器4通道三的PWMHAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_3);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */HAL_Delay(3); //控制呼吸灯呼吸速率//控制占空比大小,即修改CCRx的大小if(direction){pwmVal++;}else{pwmVal--;}//设置了ARR为499,因此每计数500为一个周期if(pwmVal > 500){ direction = 0; //改变呼吸灯方向}else if(pwmVal == 0){direction = 1; //改变呼吸灯方向}//修改定时器4通道三的PWM的占空比__HAL_TIM_SetCompare(&htim4,TIM_CHANNEL_3,pwmVal);}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
相关文章:
STM32之PWM
PWMPWM,英文名Pulse Width Modulation,是脉冲宽度调制缩写,它是通过对一系列脉冲的宽度进行调制,等效出所需要的波形(包含形状以及幅值),对模拟信号电平进行数字编码,也就是说通过调…...

操作系统(1.1)--引论
目录 一、操作系统的目标和作用 1.操作系统的目标 2.操作系统的作用 2.1 OS作为用户与计算机硬件系统之间的接口 2.2 OS作为计算机系统资源的管理者 2.3 0S实现了对计算机资源的抽象 3. 推动操作系统发展的主要动力 二、操作系统的发展过程 1.无操作系统的计算机系统…...
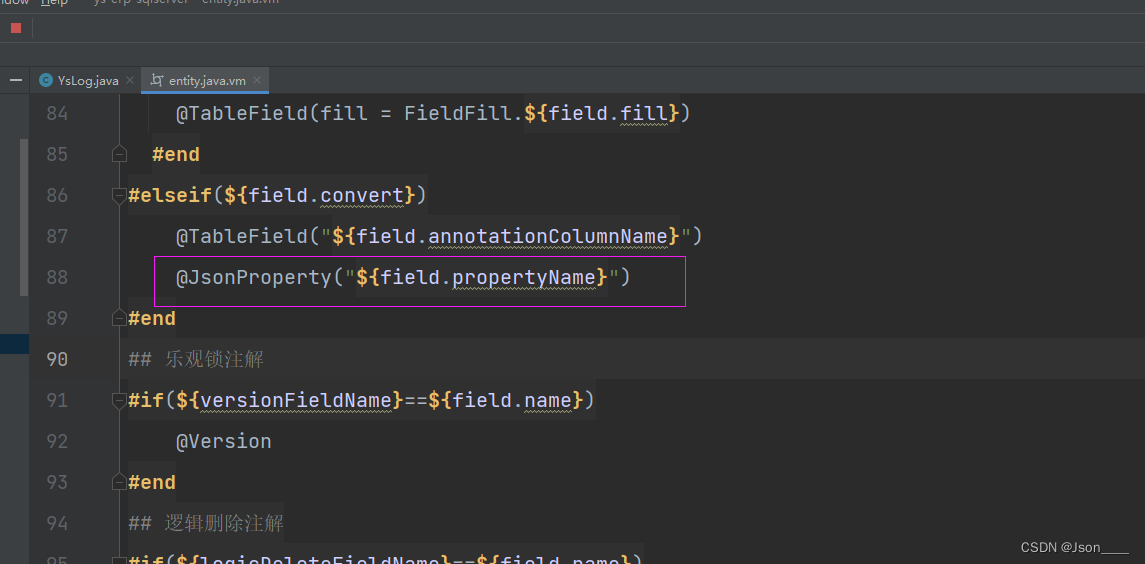
Spring boot + mybatis-plus 遇到 数据库字段 创建不规范 大驼峰 下划线 导致前端传参数 后端收不到参数 解决方案
最近使用springboot 连接了一个 sqlserver 数据库 由于数据库年数久远 ,建表字段不规范 大驼峰 下划线的字段名都有 但是 java 中 Spring boot mybatis-plus 又严格按照小驼峰 格式 生成实体类 如果不是小驼峰格式 Data 注解 get set 方法 在前端请求参数 使用这个…...

JavaScript String 字符串对象
文章目录JavaScript String 字符串对象JavaScript 字符串字符串(String)在字符串中查找字符串内容匹配替换内容字符串大小写转换字符串转为数组特殊字符字符串属性和方法JavaScript String 字符串对象 String 对象用于处理已有的字符块。 JavaScript 字…...
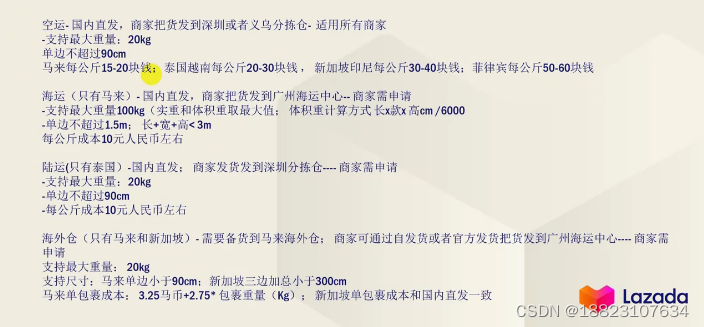
Lazada如何做好店铺运营?产品定价是关键
1.东南亚各国状况一览(对比中国) 2.东南亚消费水平真的很低? 精准定价的意义:定价过高,失去核心竞争力;定价过低,亏本对市场失去信心;价格改动,流量下降 定价公式&#…...

空口协议Eapol、802.11 Action、802.11 BAR 和 802.11BA、802.11 Encrypted Data讲解
如下报文 可以看到,除了有之前开放认证的报文之外,还多了 EAPOL 次握手的报文。另外,还有其他几种类型的报文:802.11 Action、802.11 BAR 和 802.11BA、802.11 Encrypted Data 密匙认证协议EAPOL: EAP是Extensible Authentication Protocol的缩写,EAPOL就是(EAP…...

C++类和对象
目录 一、C类定义 二、定义C对象 三、访问数据成员 四、类和对象详解 C 在 C 语言的基础上增加了面向对象编程,C 支持面向对象程序设计。类是 C 的核心特性,通常被称为用户定义的类型。 类用于指定对象的形式,它包含了数据表示法和用于处…...

Leetcode.面试题 05.02 二进制数转字符串
题目链接 面试题 05.02 二进制数转字符串 Mid 题目描述 二进制数转字符串。给定一个介于0和1之间的实数(如0.72),类型为double,打印它的二进制表达式。如果该数字无法精确地用32位以内的二进制表示,则打印“ERROR”。…...

UDPTCP网络编程
udp编程接口 一个UDP程序的编写可以分为3步: 创建一个网络套接字: 它相当于文件操作时的文件描述符,是一个程序进行网络通讯的门户, 所有的网络操作都要基于它 绑定IP和端口: 需要为网络套接字填充IP和端口信息 但是…...

【微信小程序】-- 全局配置 -- tabBar(十七)
💌 所属专栏:【微信小程序开发教程】 😀 作 者:我是夜阑的狗🐶 🚀 个人简介:一个正在努力学技术的CV工程师,专注基础和实战分享 ,欢迎咨询! &…...

Cortex-A7中断控制器GIC
Cortex-A7中断控制器GIC 中断号 芯片内部的中断都会引起IRQ InterruptGIC将所有的中断源(最多1020个中断ID)分为三类: SPI(SharedPeripheralInterrupt)共享中断,外部中断都属于SPI中断 [ID32-1019]PPI(PrivatePeripheralInterrupt)私有中断 [ID16-31]SGI(Software-…...
JavaSE:常用类
前言从现在开始进入高级部分的学习,鼓励自己一下!画个大饼: 常用类->集合框架->IO流->多线程->网络编程 ->注解与反射->GUI很重要的东西,不能不会!Object类祖宗类,主要方法:t…...

Element中树形控件在项目中的实际应用
文章目录1、使用目的2、官网组件3、组合使用组件案例4、在项目中实际应用4.1 组合组件的使用4.1.2 代码落地4.1.3 后台接口数据4.1.4 实际效果官网连接直达:Tree树形控件的使用 1、使用目的 用清晰的层级结构展示信息,可展开或折叠。 2、官网组件 <…...
kaggle RSNA 比赛过程总结
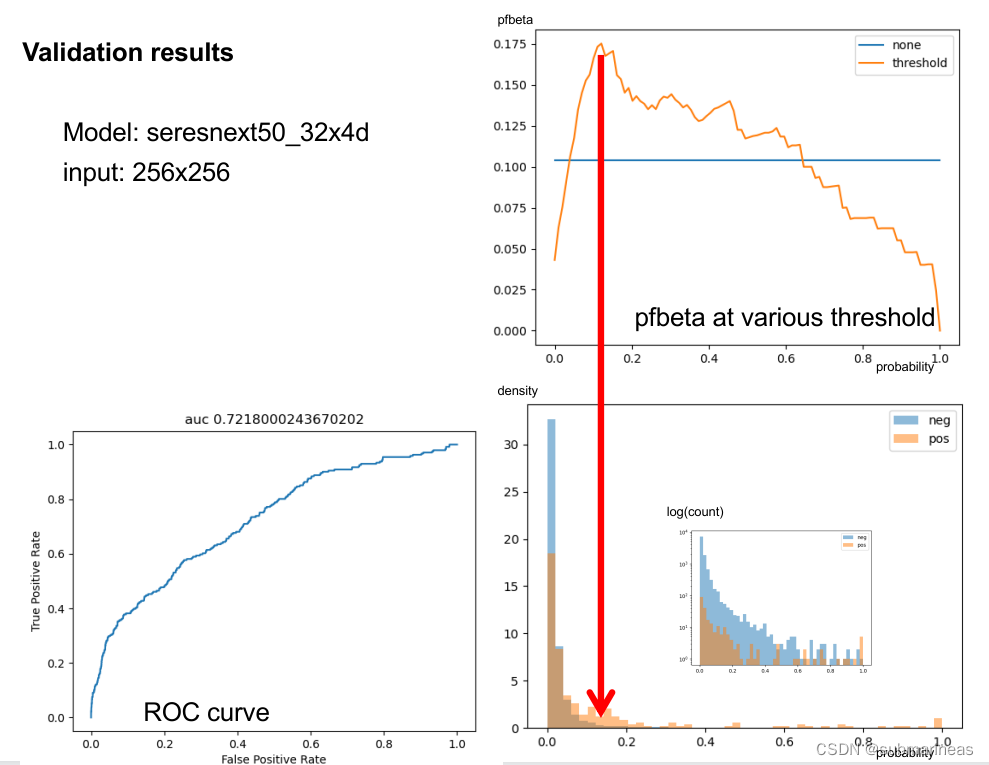
引言 算算时间,有差不多两年多没在打kaggle了,自20年最后一场后(其实之前也就打过两场,一场打铁,一场表格赛是金是银不太记得,当时相当于刺激战场,过拟合lb大赛太刺激了,各种trick只…...

51单片机入门————LED灯的控制
LED的电路图通过原理图看出,LED灯是接单片机芯片的P20~P27的一共有8个LED,51单片机也是8字节的P20x010xFE————1111 1110P20xFE可以表示把在P2端的第一个灯点亮1 表示高电平0表示低电平当为0的时候形成一个完整回路,电流从高电平流向低电平…...

J - 二进制与、平方和(线段树 + 维护区间1的个数)
2023河南省赛组队训练赛(二) - Virtual Judge (vjudge.net) 请你维护一个长度为 n 的非负整数序列 a1, a2, ..., an,支持以下两种操作: 第一种操作会将序列 al, al 1, ..., ar 中的每个元素,修改为各自和 x…...
)
BertTokenizer的使用方法(超详细)
导入 from transformers import BertTokenizer from pytorch_pretrained import BertTokenizer以上两行代码都可以导入BerBertTokenizer,transformers是当下比较成熟的库,pytorch_pretrained是google提供的源码(功能不如transformers全面) 加载 tokenizer BertT…...
:编译过程中遇到的问题总结)
深度学习编译器CINN(3):编译过程中遇到的问题总结
目录 问题一:No module named XXXX 问题描述 分析与解决方案 问题二:catastrophic error: cannot open source file "float16.h"...

yum 安装mysql8数据全过程
mysql8安装方式:(使用官方yum仓库) 1. wget https://dev.mysql.com/get/mysql80-community-release-el7-4.noarch.rpm 安装 yum install mysql80-community-release-el7-4.noarch.rpm 2、生成yum源缓存 每次当我们编写了,…...
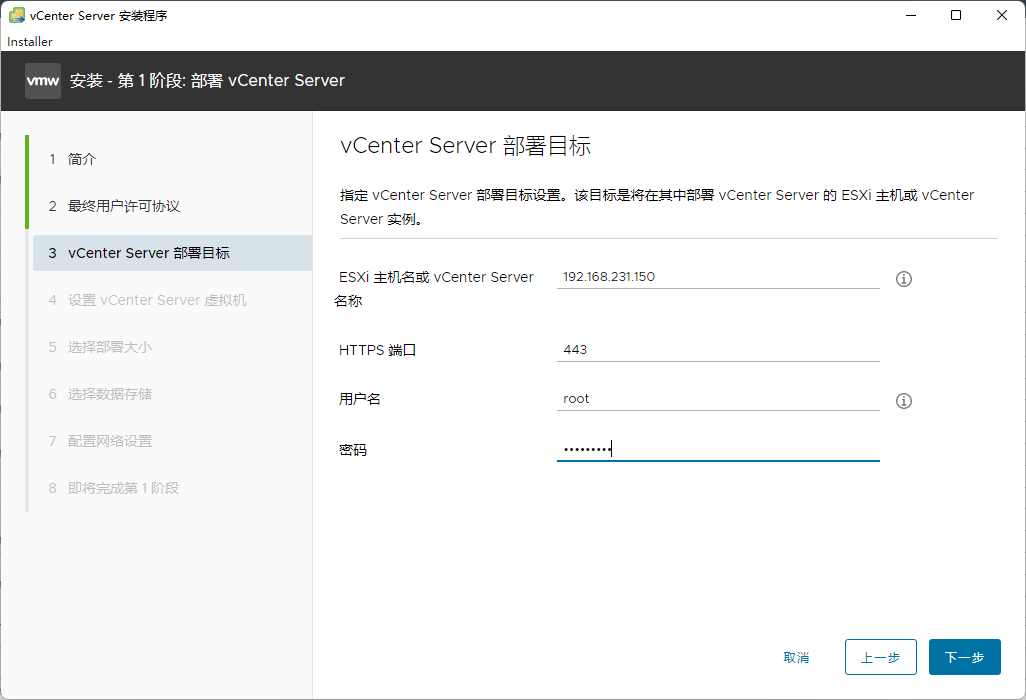
内网vCenter部署教程一
PS:因为交换机链路为trunk,安装先登录ESXI,将端口组改为管理vlan ID(1021) 一、双击镜像,打开文件夹,目录为F:\vcsa-ui-installer\win32,双击installer.exe 二、先设置语言为中文 三、点击下一步 四、选择需要安装esxi的主机。 五、设置Vcenter虚拟机的密码...

Perplexity如何秒级定位IEEE顶会论文?:2024最新实测验证的7步精准检索法
更多请点击: https://intelliparadigm.com 第一章:Perplexity如何秒级定位IEEE顶会论文? Perplexity 是一款基于大语言模型的实时搜索增强工具,其核心优势在于将语义理解与权威学术数据库(如 IEEE Xplore、ACM DL、ar…...

WarcraftHelper:免费终极指南,让魔兽争霸III在现代系统上流畅运行
WarcraftHelper:免费终极指南,让魔兽争霸III在现代系统上流畅运行 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper WarcraftHel…...

2026国产SCARA机器人品牌深度横评:高精度、零件分拣多维度对比
SCARA机器人作为工业自动化领域的重要装备,凭借其高速、高精度、易集成等优势,广泛应用于3C电子、医疗器械、新能源等精密装配场景。随着国产机器人品牌的崛起,市场竞争格局正在发生深刻变化。本文基于公开技术参数、市场应用数据及行业调研&…...

D3KeyHelper终极指南:5分钟上手暗黑3智能宏,轻松提升游戏体验
D3KeyHelper终极指南:5分钟上手暗黑3智能宏,轻松提升游戏体验 【免费下载链接】D3keyHelper D3KeyHelper是一个有图形界面,可自定义配置的暗黑3鼠标宏工具。 项目地址: https://gitcode.com/gh_mirrors/d3/D3keyHelper 还在为暗黑破坏…...

Apache Arrow图像数据处理终极指南:如何构建高性能计算机视觉应用
Apache Arrow图像数据处理终极指南:如何构建高性能计算机视觉应用 【免费下载链接】arrow Apache Arrow is a multi-language toolbox for accelerated data interchange and in-memory processing 项目地址: https://gitcode.com/gh_mirrors/arrow13/arrow …...
)
从劝退到离不开:Vim新手入门实战博客(附高效技巧)
文章目录前言💙一、vim是什么?💜二、为什么要学习vim?💚三、vim总览💔四、vim的基本操作4.1vim正常模式命令集(命令模式)4.2vim底行模式命令集4.3vim视图模式💗五、一些小技巧💖六、…...

2025届毕业生推荐的六大AI科研网站实测分析
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 一款专为院校学子以及初级科研工作者所设计的AI开题报告工具,它聚焦于开题环节的…...

如何快速掌握Avogadro 2:开源分子可视化工具的终极指南
如何快速掌握Avogadro 2:开源分子可视化工具的终极指南 【免费下载链接】avogadrolibs Avogadro libraries provide 3D rendering, visualization, analysis and data processing useful in computational chemistry, molecular modeling, bioinformatics, material…...

忘记压缩包密码怎么办?3步找回加密文件的终极免费解决方案
忘记压缩包密码怎么办?3步找回加密文件的终极免费解决方案 【免费下载链接】ArchivePasswordTestTool 利用7zip测试压缩包的功能 对加密压缩包进行自动化测试密码 项目地址: https://gitcode.com/gh_mirrors/ar/ArchivePasswordTestTool 你是否曾经面对一个加…...

原来Ilya还有70亿美元OpenAI股权
鹭羽 发自 凹非寺量子位 | 公众号 QbitAI马斯克 VS 奥特曼的世纪庭审,也太劲爆了——感觉自己像是瓜田里的猹,一瓜未平一瓜又起。吃不过来,根本吃不过来……这不,就在刚刚,OpenAI的造富神话被「一不小心」炸了出来。Op…...