Qt 如何使用VTK显示点云
开发环境
ubuntu 20.04
VTK 8.2
编译VTK
下载源码
git clone --recursive https://gitlab.kitware.com/vtk/vtk.git
使用版本管理工具,切换版本到8.2
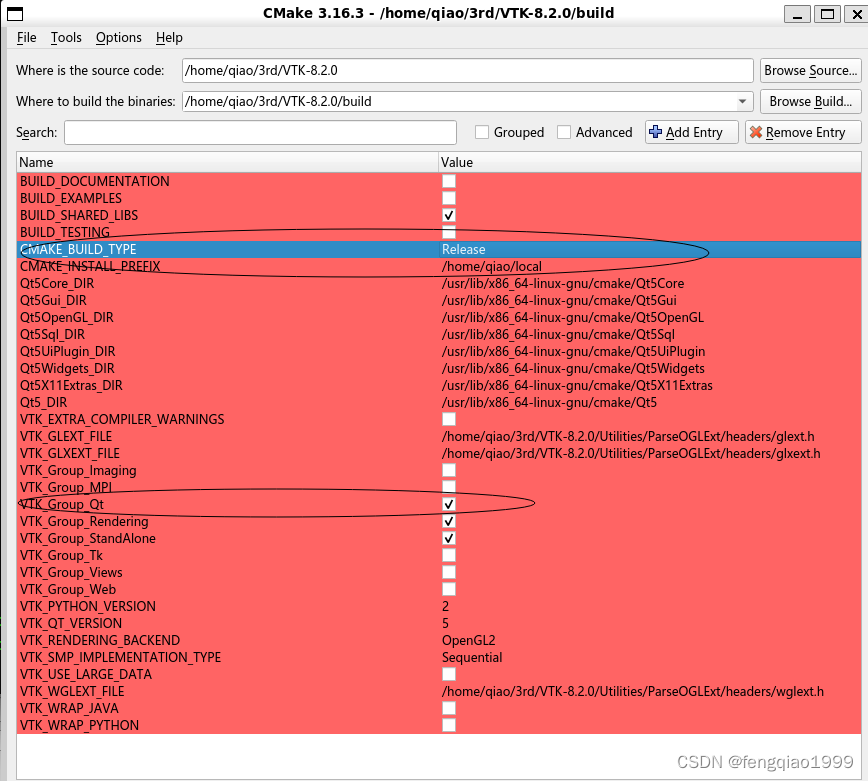
更改编译选项,这里使用cmake-gui进行配置
1、编译类型修改为Release
2、安装路径可以设置,也可以不设置,不设置默认安装到/usr/local目录下
3、勾选VTK_Group_Qt
4、勾选Module_vtkGUISupportQtOpenGL

生成成功后,执行编译
cmake ..
make -j4
make install
开发
CMakeLists
find_package(VTK 8.2 COMPONENTS vtkGUISupportQt
vtkGUISupportQtOpenGL
vtkRenderingGL2PSOpenGL2
vtkRenderingVolumeOpenGL2 REQUIRED)complice_module(${PROJECT_NAME})target_link_libraries( ${PROJECT_NAME} PRIVATE ${VTK_LIBRARIES}
.h
#include <QVTKOpenGLNativeWidget.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <vtkGenericOpenGLRenderWindow.h>
#include <vtkOrientationMarkerWidget.h>class CloudView : public QVTKOpenGLNativeWidget
{Q_OBJECT
public:explicit CloudView(QWidget* parent = nullptr);
private:pcl::visualization::PCLVisualizer::Ptr m_viewer;vtkSmartPointer<vtkRenderer> m_render;vtkSmartPointer<vtkGenericOpenGLRenderWindow> m_renderwindow;vtkSmartPointer<vtkOrientationMarkerWidget> m_axes;
};
.cpp
#include "cloudview.h"
#include <vtkAutoInit.h>
VTK_MODULE_INIT(vtkRenderingOpenGL2)
VTK_MODULE_INIT(vtkInteractionStyle)
VTK_MODULE_INIT(vtkRenderingVolumeOpenGL2)
VTK_MODULE_INIT(vtkRenderingFreeType)#include <vtkAxesActor.h>CloudView::CloudView(QWidget* parent): QVTKOpenGLNativeWidget(parent),m_render(vtkSmartPointer<vtkRenderer>::New()),m_renderwindow(vtkSmartPointer<vtkGenericOpenGLRenderWindow>::New()),m_axes(vtkSmartPointer<vtkOrientationMarkerWidget>::New())
{m_renderwindow->AddRenderer(m_render);m_viewer.reset(new pcl::visualization::PCLVisualizer(m_render, m_renderwindow, "viewer", false));m_viewer->setupInteractor(this->GetInteractor(), this->GetRenderWindow());this->SetRenderWindow(m_viewer->getRenderWindow());m_viewer->setBackgroundColor((double)150.0 / 255.0, (double)150.0 / 255.0, (double)150.0 / 255.0);vtkSmartPointer<vtkAxesActor> actor = vtkSmartPointer<vtkAxesActor>::New();m_axes->SetOutlineColor(0.9300, 0.5700, 0.1300);m_axes->SetOrientationMarker(actor);m_axes->SetInteractor(m_viewer->getRenderWindow()->GetInteractor());m_axes->SetViewport(0.9, 0, 1, 0.15);m_axes->SetEnabled(true);m_axes->InteractiveOn();m_axes->InteractiveOff();m_viewer->getRenderWindow()->Render();
}void CloudView::addPointCloud(const Cloud::Ptr& cloud)
{if (!m_viewer->contains(cloud->id().toStdString()))m_viewer->addPointCloud<PointXYZRGBN>(cloud, cloud->id().toStdString());else{pcl::visualization::PointCloudColorHandlerRGBField<PointXYZRGBN> rgb(cloud);m_viewer->updatePointCloud<PointXYZRGBN>(cloud, rgb, cloud->id().toStdString());}if (cloud->pointSize() != 1)m_viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE,cloud->pointSize(), cloud->id().toStdString());if (cloud->opacity() != 1)m_viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_OPACITY,cloud->opacity(), cloud->id().toStdString());m_viewer->getRenderWindow()->Render();
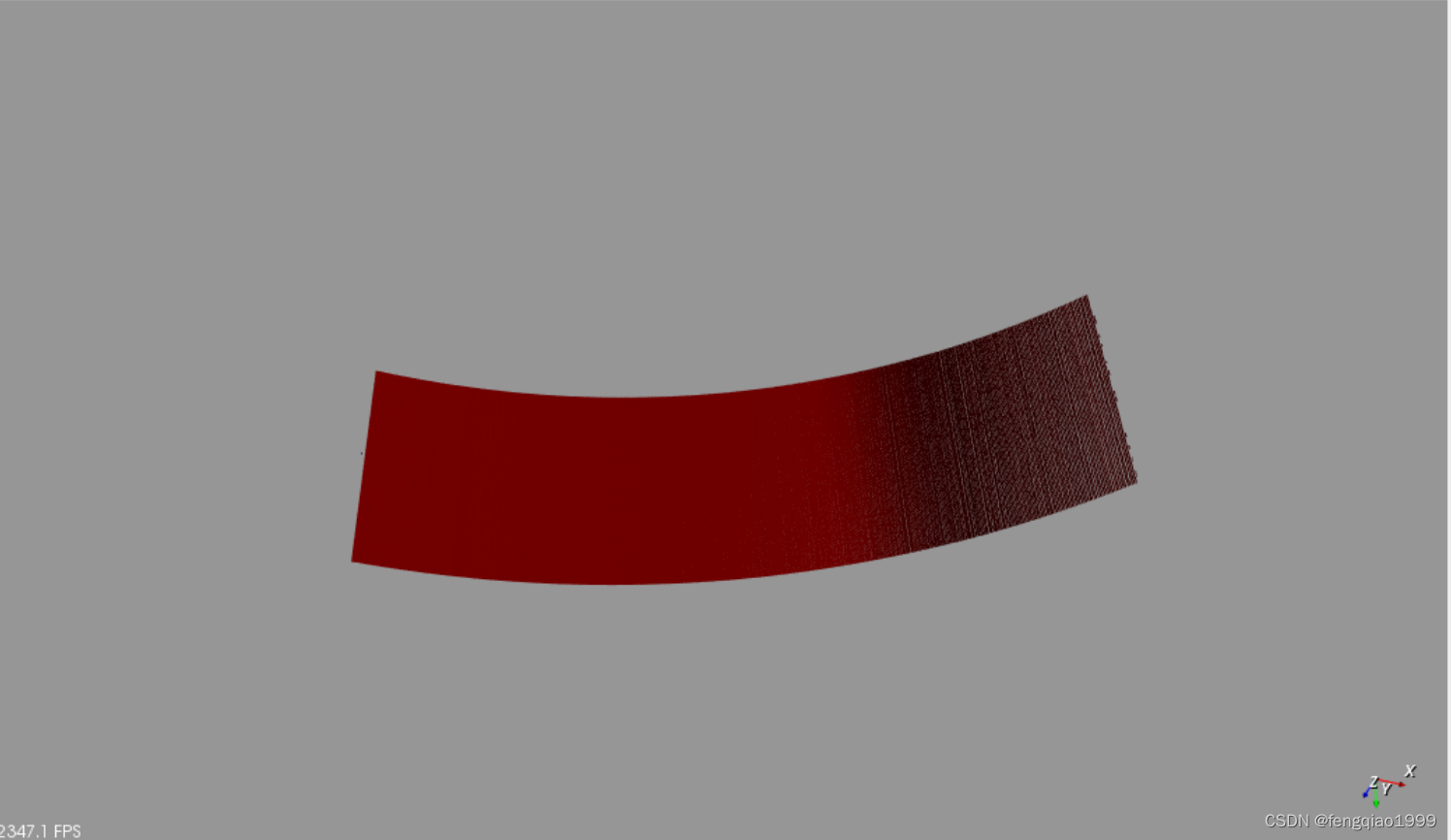
}ui上拖拽一个openGl控件, 然后提升为CloudView,然后就可以显示点云数据了
PointCloud::Ptr pointPtr;ui->cloudview->addPointCloud( cloud);
ui->cloudview->resetCamera();显示效果
相关文章:
Qt 如何使用VTK显示点云
开发环境 ubuntu 20.04 VTK 8.2 编译VTK 下载源码 git clone --recursive https://gitlab.kitware.com/vtk/vtk.git 使用版本管理工具,切换版本到8.2 更改编译选项,这里使用cmake-gui进行配置 1、编译类型修改为Release 2、安装路径可以设置…...
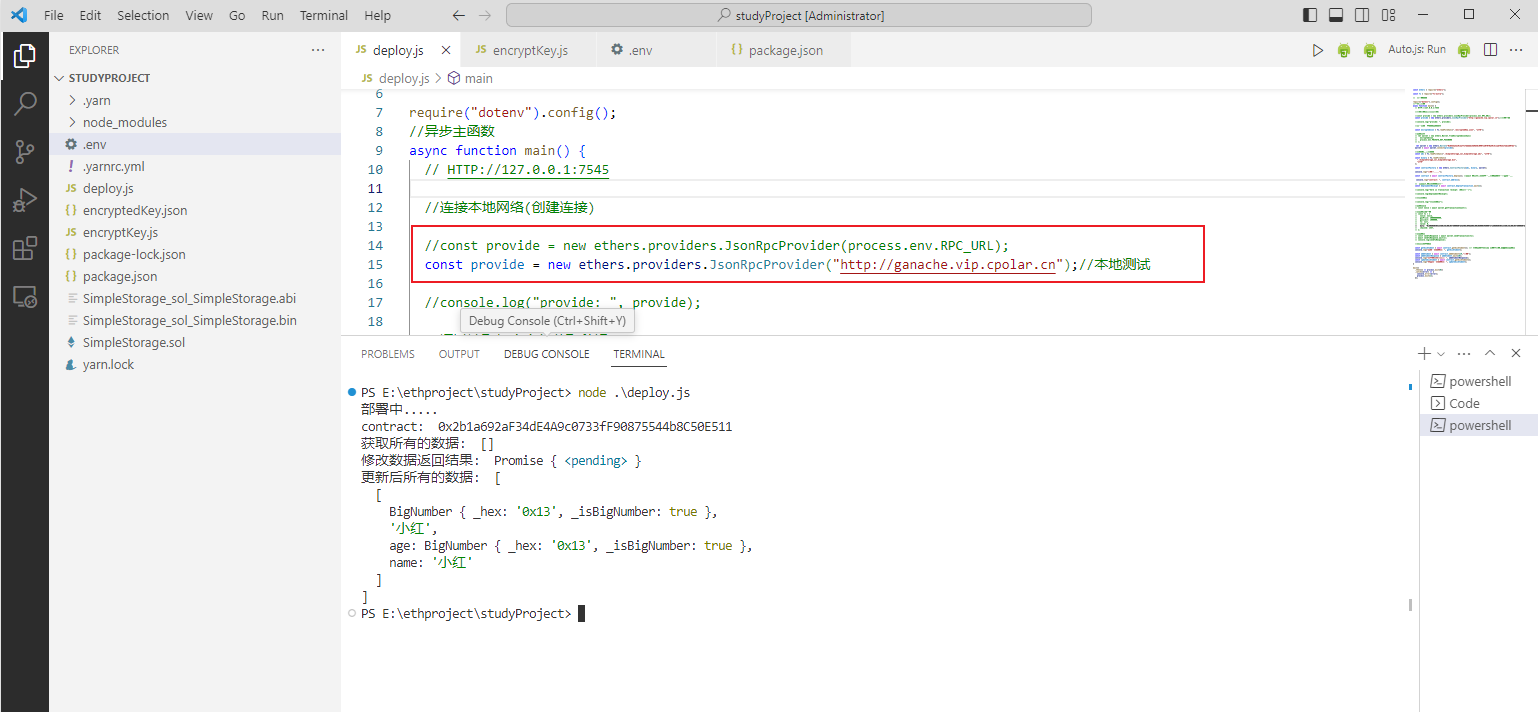
Ganache结合内网穿透实现远程或不同局域网进行连接访问
文章目录 前言1. 安装Ganache2. 安装cpolar3. 创建公网地址4. 公网访问连接5. 固定公网地址 前言 Ganache 是DApp的测试网络,提供图形化界面,log日志等;智能合约部署时需要连接测试网络。 Ganache 是一个运行在本地测试的网络,通过结合cpol…...
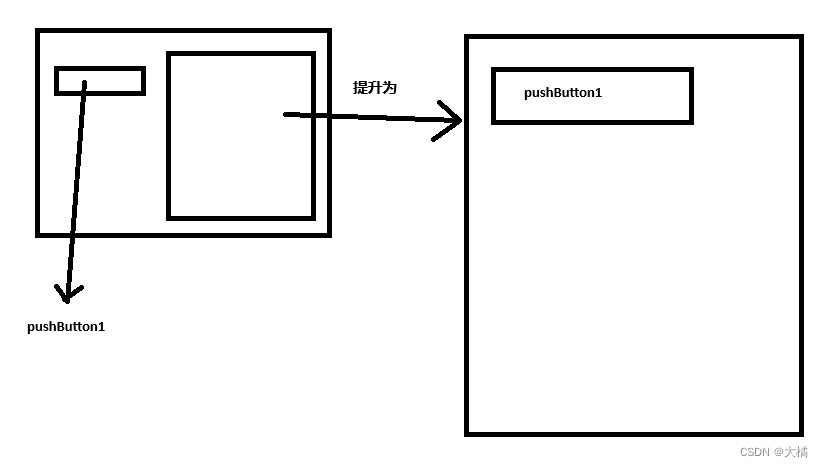
Qt槽函数不响应不执行的一种原因:ui提升导致重名
背景: 一个包含了组件提升的ui,有个按钮的槽函数就是不响应,于是找原因。 分析: 槽函数的对应一是通过connect函数绑定信号,二是on_XXX_signal的命名方式。界面上部件的槽函数通常是第二种。 我反复确认细节&#…...
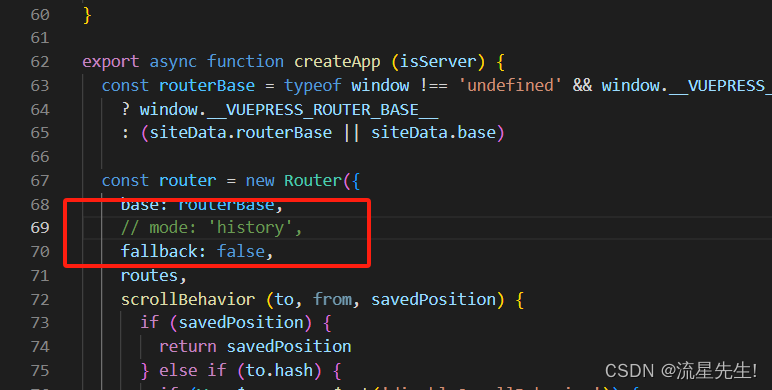
vuepress路径问题,导致图片不显示
图片不显示,报 Uncaught SyntaxError: Unexpected token <错误 很可能就是:路径配置原因 1.当设置为 / 时,VuePress 会假设你的站点将部署到服务器的根路径, 例如 https://yourdomain.com/。 2.生成的页面链接和资源引用将以…...
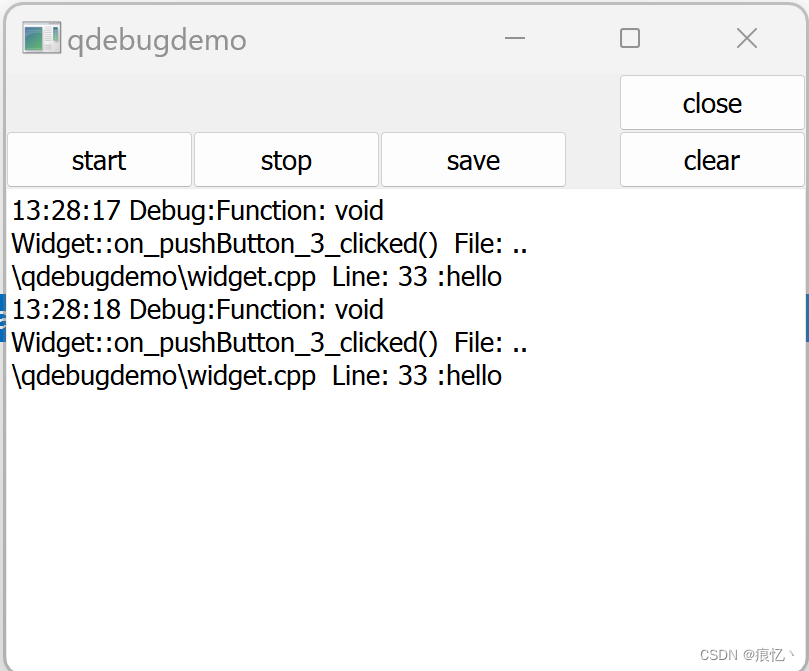
QT 重定向qdebug输出到自绘界面
因为在嵌入式中调试qt需要查看输出信息,特意写了一个类用户便捷查看qdebug信息 界面如下: 提供了开始,停止,保存,清空,退出功能,具体代码下文给出 文件如下 #ifndef QDEBUGREDIRECT_H #define QDEBUGREDIRECT_H /**qdebug 重定向类 定向到界面控件*李吉磊 2023.12.7* */#in…...
前端(一):HTML+CSS
参考课程:23最新版web前端开发_哔哩哔哩_bilibili 文档:GitHub - codeNiuMa/HTML-md-file: 学习HTML课程时的资料 目录 1 HTML 1.1 骨架 DOCTYPE html标签 head标签 body标签 title标签 meta标签 1.2 标签标题h1 1.3 段落p 1.4 水平线 1.5 图片img 1.6 …...
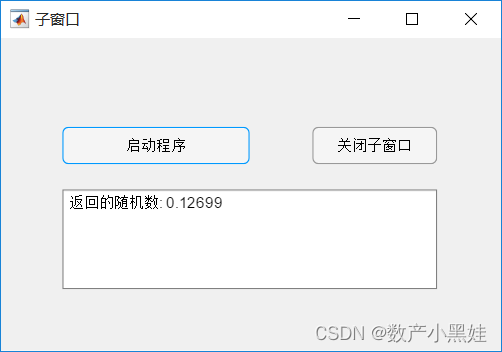
如何使用Matlab完成窗口与子窗口
目录 一、前言 二、主窗口与主窗口按钮 三、子窗口 四、调用函数并显示在子窗口中的文本框中 五、关闭子窗口 一、前言 有时候需要借用Matlab完成一个图窗功能,但是我们的程序不仅拥有功能,还拥有一些子功能,那么我们该如何借助Matlab完…...

Threejs之相机基础
参考资料 正投影相机…相机控件MapControls 知识点 注:基于Three.jsv0.155.0 正投影相机正投影相机-Canvas尺寸变化包围盒Box3地图案例(包围盒、正投影)相机动画(.position和.lookAt())不同方向的投影视图旋转渲染结果(.up相机上方向)管道漫游案例OrbitControls…...

2024SIA上海国际轴承工业展览会 ▎参行业盛会 展轴研风采
2024SIA上海国际轴承工业展览会 内容:1、轴承制品展区:2、轴承设备展区:3、轴承零件展区: 国际轴承展丨轴承工业展丨轴承装备展丨上海轴承展丨上海轴承工业展丨上海轴承装备展 2024上海国际轴承工业展览会将会于2024年7月24-26日…...

SQLMap介绍
预计更新SQL注入概述 1.1 SQL注入攻击概述 1.2 SQL注入漏洞分类 1.3 SQL注入攻击的危害 SQLMap介绍 2.1 SQLMap简介 2.2 SQLMap安装与配置 2.3 SQLMap基本用法 SQLMap进阶使用 3.1 SQLMap高级用法 3.2 SQLMap配置文件详解 3.3 SQLMap插件的使用 SQL注入漏洞检测 4.1 SQL注入…...

平头哥玄铁系列 RISC-V 芯片及开发板
1、玄铁 9 系列概述 玄铁 8 系列 基于C-SKY架构,玄铁 9 系列基于 RISC-V 架构。E 系列为 RISC-V 32 位,C 系列为 RISC-V 64 位。 E902:超低功耗 RSIC-V 架构处理器 E902 采用 2 级极简流水线兼容 RISC-V 架构且对执行效率等方面进行了增强&a…...

Android 删除浏览器导航页面修改默认主页
Android 删除浏览器导航页面修改默认主页 近来收到客户需求反馈,需要删除浏览器导航页面并将百度设置为默认主页,具体修改参照如下: 删除浏览器导航页面: /vendor/mediatek/proprietary/packages/apps/Browser/src/com/android…...
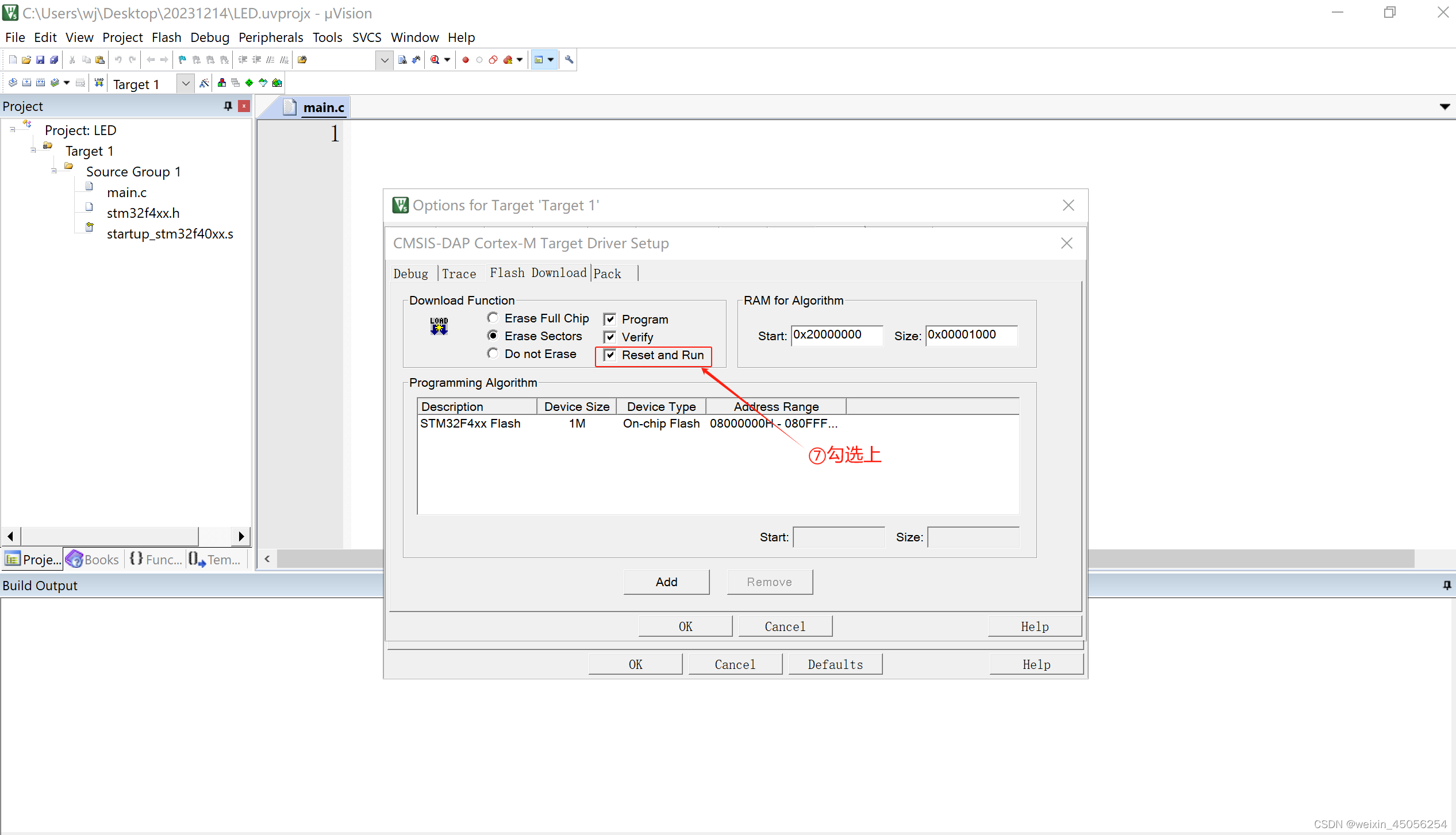
【Stm32-F407】Keil uVision5 下新建工程
①双击鼠标左键打开Keil uVision5,选择 Project 下的 New uVision Project ; ②在期望的文件夹下创建一个工程,并按如下要求操作; ③添加文件类型,按如下要求操作 ④如有需要可添加相关启动文件在工程文件夹下并添加到…...

linux中文件服务器NFS和FTP服务
文件服务器 NFSNFS介绍配置nfs文件共享服务端客户端 FTPftp介绍FTP基础ftp主动模式ftp被动模式 Vsftp 服务器简介vsftpd配置安装vsftpd[ftp的服务端]编辑配置文件匿名用户设置创建本地用户使用ftp服务 客户端操作匿名用户登录本地用户登录lftp服务 NFS NFS介绍 文件系统级别共…...

茶室茶楼计时计费软件,软件中的商品管理计时操作教程
一、前言 茶室在营业的时候,不但需要计时间,同时还需要管理商品入库出库库存等管理。这就需要一款实用的操作简单的管理软件。 下面以 佳易王茶社计时计费软件V18.0为例说明,其他版本可以参考本教程。 软件下载或技术支持可以点击最下方官…...
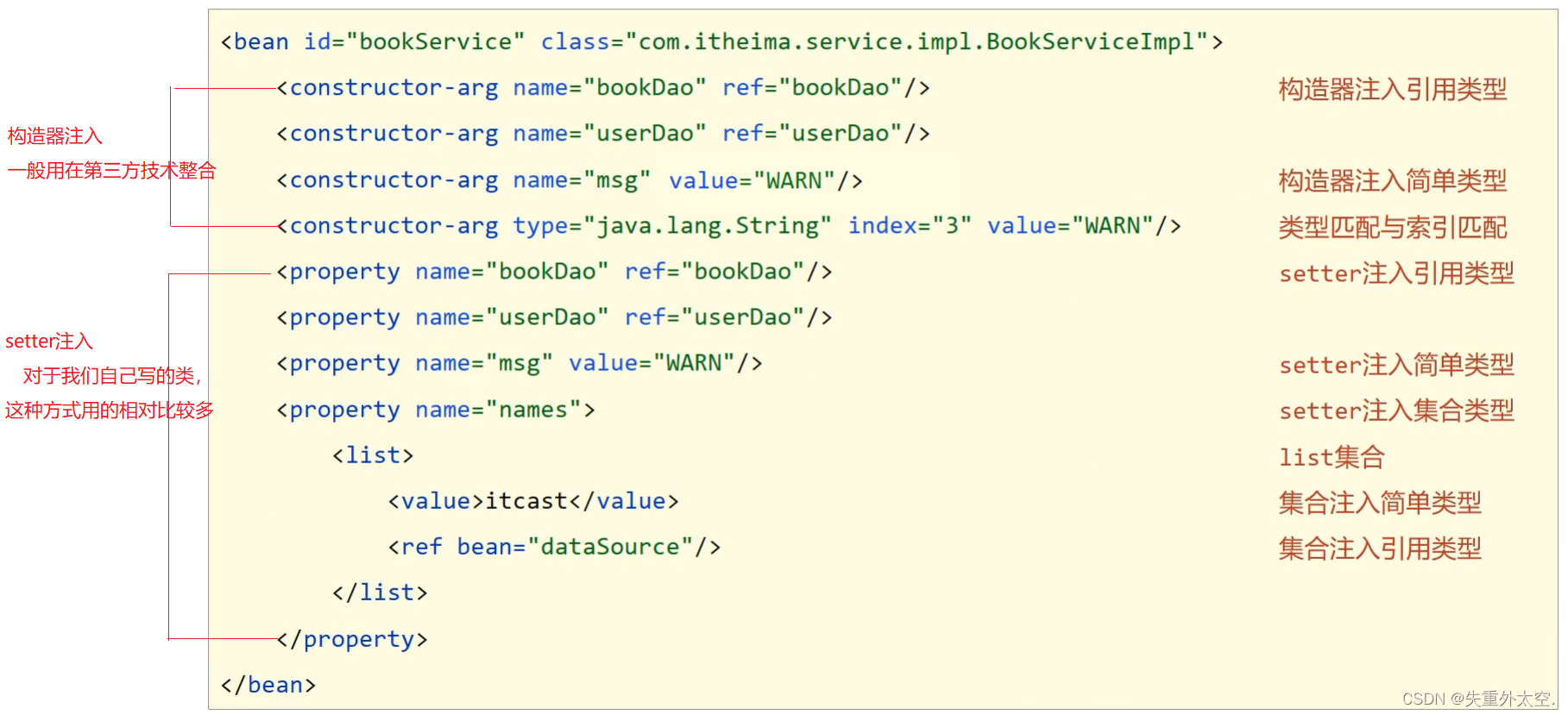
从入门到精通:掌握Spring IOC/DI配置管理第三方bean的技巧
IOC/DI配置管理第三方bean 1.1 案例:数据源对象管理1.1.1 环境准备1.1.2 思路分析1.1.3 实现Druid管理步骤1:导入druid的依赖步骤2:配置第三方bean步骤3:从IOC容器中获取对应的bean对象步骤4:运行程序 1.1.4 实现C3P0管理步骤1:导入C3P0的依赖步骤2:配置第三方bean步骤3:运行程…...
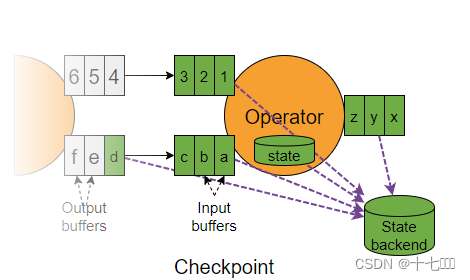
Flink的容错机制
容错机制 容错:指出错后不影响数据的继续处理,并且恢复到出错前的状态。 检查点:用存档读档的方式,将之前的某个时间点的所有状态保存下来,故障恢复继续处理的结果应该和发送故障前完全一致,这就是所谓的检…...
)
GO设计模式——11、装饰器模式(结构型)
目录 装饰器模式(Decorator Pattern) 装饰器模式的核心角色: 优缺点 使用场景 代码实现 装饰器模式(Decorator Pattern) 装饰器模式(Decorator Pattern)允许向一个现有的对象添加新的功…...
全志V3s之U-Boot
1、安装交叉编译器: ARM交叉编译器的官网:交叉编译器 a、使用wget下载: wget https://releases.linaro.org/components/toolchain/binaries/latest/arm-linux-gnueabihf/gcc-linaro-6.3.1-2017.05-x86_64_arm-linux-gnueabihf.tar.xzb、解…...

【华为OD】依据用户输入的单词前缀,从已输入的英文语句中联想出用户想输入的单词,按字典序输出联想到的单词序列
题目描述主管期望你来实现英文输入法单词联想功能需求如下:依据用户输入的单词前缀,从已输入的英文语句中联想出用户想输入的单词,按字典序输出联想到的单词序列,如果联想不到,请输出用户输入的单词前缀注意1.英文单词联想时,区分大小写2.缩略形式如"dont",判定…...
安装与中文环境配置实战)
Halcon深度学习工具(DLT)安装与中文环境配置实战
1. Halcon DLT安装前的准备工作 第一次接触Halcon深度学习工具(DLT)时,我完全被各种专业术语搞晕了。后来才发现,只要做好前期准备,安装过程其实比想象中简单得多。首先需要确认的是你的Windows系统版本,DLT目前支持Windows 10和1…...

δ - mem:提升大型语言模型内存效率,得分最高可达 1.31 倍!
快速通道可了解 arXiv 成为独立非营利组织的情况,也能直达康奈尔大学官网。同时,还能通过链接进行捐赠,支持 arXiv 的发展。搜索与导航提供了多种搜索途径,可在所有字段(标题、作者、摘要等)进行搜索。还有…...

Taotoken用量看板如何帮助个人开发者管理月度预算
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken用量看板如何帮助个人开发者管理月度预算 对于独立工作的个人开发者而言,项目预算往往是决定技术选型与使用策…...

城通网盘高速解析终极指南:如何免费实现40倍下载提速
城通网盘高速解析终极指南:如何免费实现40倍下载提速 【免费下载链接】ctfileGet 获取城通网盘一次性直连地址 项目地址: https://gitcode.com/gh_mirrors/ct/ctfileGet 你是否厌倦了城通网盘那令人抓狂的蜗牛下载速度?每次下载大文件都要面对漫长…...

Path of Building:3个步骤从Build小白到规划大师的完整指南
Path of Building:3个步骤从Build小白到规划大师的完整指南 【免费下载链接】PathOfBuilding Offline build planner for Path of Exile. 项目地址: https://gitcode.com/GitHub_Trending/pa/PathOfBuilding Path of Building作为流放之路玩家最信赖的Build规…...

从零构建情感大语言模型:基于EmoLLM的实践指南
1. 项目概述:当大语言模型学会“察言观色”最近在折腾一个挺有意思的开源项目,叫SmartFlowAI/EmoLLM。光看名字你可能就猜到了,这玩意儿跟“情绪”和“大语言模型”有关。没错,它的核心目标就是让冷冰冰的LLM(Large La…...

Nextra:基于Next.js的现代化文档站构建利器
1. 项目概述:为什么Nextra能成为文档站构建的“瑞士军刀”?如果你最近在寻找一个构建技术文档、博客或个人知识库的工具,大概率会听到“Nextra”这个名字。它不是一个独立框架,而是一个基于Next.js的静态站点生成器,专…...
)
保姆级教程:INCA 7.2.3 从新建工程到观测标定的完整流程(附A2L文件处理技巧)
INCA 7.2.3 全流程实战指南:从工程搭建到参数标定的深度解析 在汽车电子开发领域,标定工具链的掌握程度直接影响开发效率。作为行业标准的INCA软件,其7.2.3版本在工程管理、实时观测和参数标定方面提供了更完善的解决方案。本文将采用"操…...

移动端Shell集成AI助手:ShellGPTMobile部署与实战指南
1. 项目概述:当ShellGPT遇见移动端如果你是一个重度命令行用户,同时又对AI助手(比如ChatGPT)的便利性爱不释手,那么你很可能面临一个尴尬的境地:在终端里敲命令时,突然需要AI帮忙解释一段日志、…...

我给了智能体$100去赚钱,结果...
你看过那些演示。一个自主智能体启动,获得一个目标,然后——跳到两周后的 Twitter 帖子——它不知怎么地就在运营一个 Shopify 店铺、写通讯和炒币了。未来已来。AGI 即将降临。买课吧。 我想找出实际发生了什么。 所以我给了一个智能体 100 美元和一个…...