面试题总结(十五)【ARMstm32】【华清远见西安中心】
- ARM Cortex-M,Cortex-R,Cortex-A的区别和差异是什么?
ARM Cortex-M,Cortex-R和Cortex-A是ARM架构下的不同处理器系列,针对不同的应用领域和需求进行了优化和设计。它们之间的区别和差异主要体现在以下几个方面:
1. 应用领域:Cortex-M系列主要针对嵌入式系统和微控制器应用,如IoT设备、传感器、智能家居等。Cortex-R系列主要用于实时应用,如汽车电子、工业控制等。Cortex-A系列则面向高性能应用,如智能手机、平板电脑、服务器等。
2. 处理器核心:Cortex-M系列采用较简化的处理器核心,具有较低的功耗和成本,适合资源受限的嵌入式系统。Cortex-R系列具有更高的性能和实时性能特性,支持较复杂的操作系统和实时任务。Cortex-A系列则具有更高的性能和多核处理能力,支持较复杂的操作系统和多任务处理。
3. 指令集:Cortex-M系列使用Thumb指令集,这是一种16位的压缩指令集,可以提高代码密度和节省存储空间。Cortex-R和Cortex-A系列则使用ARM指令集,这是一种32位指令集,提供更丰富的指令集和功能。
4. 内存保护:Cortex-M系列通常不支持内存保护机制,而Cortex-R和Cortex-A系列支持硬件内存保护单元(MMU)和/或内存保护单元(MPU),用于隔离和保护不同的内存区域。
5. 中断和实时性:Cortex-M和Cortex-R系列都具有较低的中断延迟和较高的实时性,适用于对实时响应要求较高的应用。Cortex-A系列则更加注重高性能和多任务处理,中断延迟较高,不适合实时性要求较高的应用。
总的来说,Cortex-M、Cortex-R和Cortex-A系列针对不同的应用场景和需求进行了优化和设计,具有不同的性能特性和功能。选择适合的处理器系列取决于具体的应用需求和系统要求。
- 简述ARM的AMBA总线架构是什么?
ARM的AMBA(Advanced Microcontroller Bus Architecture)总线架构是一种用于片上系统(SoC)的开放标准总线架构。它提供了一种灵活、可扩展和可重用的总线解决方案,用于连接处理器、存储器和外设等IP核。
AMBA总线架构包括以下几个主要组件:
1. AMBA主总线(AMBA Main Bus):AMBA主总线是AMBA总线架构的核心组件,用于连接处理器和其他IP核。它提供了高带宽和低延迟的数据传输,支持高效的读写操作和多个主设备的并发访问。AMBA主总线通常采用高速并行总线的形式,如AMBA 3 AHB(Advanced High-performance Bus)。
2. AMBA桥接器(AMBA Bridges):AMBA桥接器用于连接不同的AMBA总线,并提供总线之间的互连和数据传输。它允许不同的AMBA设备在不同的总线上进行通信,实现片上系统内部不同子系统的连接和交互。
3. AMBA外设接口(AMBA Peripheral Interfaces):AMBA外设接口定义了外设设备与AMBA总线之间的连接和通信方式。它提供了标准的接口和协议,使开发者可以轻松集成各种外设设备,如UART、SPI、I2C、DMA等。
4. AMBA系统控制器(AMBA System Controllers):AMBA系统控制器提供了对AMBA总线的管理和控制功能。它可以管理总线访问权限、处理中断、实现缓存一致性和错误处理等。系统控制器还可以提供额外的功能,如电源管理、时钟控制和配置管理等。
AMBA总线架构的优势在于它的可扩展性和灵活性。开发者可以根据具体的应用需求,选择适合的AMBA总线配置,并集成各种IP核和外设设备。AMBA架构的广泛应用使得不同的IP核和设备可以在不同的SoC中互操作,并提高了系统的可重用性和开发效率。
- 一个最小系统由几部分组成?
一个最小系统通常由以下几部分组成:
1. 处理器(Processor):处理器是系统的核心组件,负责执行指令和处理数据。它可以是微处理器、微控制器或其他定制的处理器。
2. 存储器(Memory):存储器用于存储程序代码和数据。它包括随机存储器(RAM)和只读存储器(ROM)等。RAM用于存储临时数据和变量,而ROM用于存储不可修改的程序代码。
3. 时钟(Clock):时钟提供系统的时序信号,用于同步处理器和其他组件的操作。它可以是晶体振荡器或其他时钟源。
4. 外设(Peripherals):外设用于与系统外部进行通信和交互。它可以包括输入设备(如键盘、鼠标)、输出设备(如显示器、打印机)、通信设备(如串口、以太网接口)等。
5. 电源(Power Supply):电源为系统提供电能,以供各个组件正常工作。它可以是电池、电源适配器或其他电源源泉。
除了上述部分,最小系统还可能包括其他组件,如系统总线、中断控制器、系统控制器等,以支持系统的功能和扩展性。最小系统的设计取决于应用需求和系统规模,可以根据具体的需求进行定制和扩展。
- 简述一下锁相环的作用是什么?
锁相环(Phase-Locked Loop,简称PLL)是一种电子控制系统,其作用是将输入信号与参考信号进行比较和同步,以生成一个输出信号,使其频率和相位与参考信号保持一致。锁相环常见的应用包括时钟恢复、频率合成、频率调制解调等。
锁相环的主要作用有以下几个方面:
1. 频率稳定:锁相环可以使输出信号的频率与参考信号的频率保持一致,从而实现频率稳定。它可以对输入信号的频率进行跟踪和调整,以消除频率偏差和抖动。
2. 相位同步:锁相环可以使输出信号的相位与参考信号的相位保持一致,实现相位同步。它可以提供精确的相位控制,使输出信号的相位与输入信号保持一致或滞后/提前一个特定的相位角。
3. 时钟恢复:锁相环可以用于恢复失真或噪声影响下的数字信号的时钟。它可以提供稳定的时钟信号,使得接收方可以正确解析和重建输入信号。
4. 频率合成:锁相环可以根据参考信号的频率合成一个更高或更低的输出频率。通过调整锁相环的分频比和倍频比,可以实现对输出频率的精确控制。
5. 频率调制解调:锁相环可以用于频率调制和解调。通过调整参考信号的频率,可以实现对输入信号进行频率调制,而通过解调器可以从调制信号中提取原始信号。
总的来说,锁相环的作用是实现输入信号与参考信号的频率和相位同步,以实现频率稳定、相位控制和时钟恢复等功能。它在通信、数据处理和控制系统等领域都有广泛的应用。
- 你对总线的理解是什么?
总线是计算机系统中的一种通信架构,用于连接和传输数据、控制信号和地址等信息。它是计算机系统中各个组件之间进行通信和数据交换的重要通道。
总线通常由多个并行的电子线路组成,它们可以传输二进制数据和控制信号。总线的主要功能包括:
1. 数据传输:总线可以传输数据和指令,用于在计算机系统中不同组件之间的数据交换。数据可以是处理器与内存之间的数据传输,也可以是处理器与外设之间的数据传输。
2. 地址传输:总线可以传输地址信息,用于指定数据的读取或写入位置。处理器使用地址线将要访问的内存单元或外设的地址发送到总线上。
3. 控制信号传输:总线可以传输各种控制信号,用于控制计算机系统中的各个组件。例如,总线可以传输时钟信号以同步各个组件的操作,传输读写信号以指示数据传输的方向等。
总线可以分为多种类型,如系统总线、数据总线、地址总线和控制总线等。系统总线是计算机系统中各个组件的主要通信通道,而数据总线用于传输数据和指令,地址总线用于传输地址信息,控制总线用于传输各种控制信号。
总线的设计和规格取决于计算机系统的架构和需求。不同的计算机系统可能采用不同类型和规格的总线,以满足不同的性能、带宽和扩展性要求。总线的设计需要考虑数据传输速度、可靠性、并发访问和系统扩展等因素。
- 简述一下RAM,Flash,ROM的区别是什么?
RAM(Random Access Memory,随机存取存储器)是一种用于临时存储数据的存储器。它具有快速的读写速度,可以被随机访问,但是数据在断电后会丢失。RAM通常用于存储程序的执行代码和临时数据。
Flash存储器是一种非易失性存储器,它可以在断电后保持数据。与RAM不同,Flash存储器的读取速度相对较慢,并且写入操作需要特殊的擦除过程。Flash存储器通常用于存储持久性数据,如操作系统、固件、配置文件等。
ROM(Read-Only Memory,只读存储器)是一种只能读取而不能写入的存储器。ROM中的数据在断电后不会丢失,因此它被用于存储固定的、不可修改的程序代码和数据。ROM的内容在制造过程中被写入,并且不能被更改。
因此,RAM和Flash都是可读写的存储器,但RAM是一种临时存储器,数据在断电后会丢失,而Flash是一种非易失性存储器,数据在断电后可以保持。而ROM是一种只读存储器,其中的数据是固定的,无法修改。这些存储器在计算机系统中起到不同的作用,用于存储不同类型的数据和程序代码。
- 简述三极管和MOS的区别和使用场景是什么?
三极管(Transistor)和MOS(Metal-Oxide-Semiconductor)是两种常见的半导体器件,具有不同的结构和工作原理。
三极管是一种三层结构的器件,包括发射极(Emitter)、基极(Base)和集电极(Collector)。它的工作原理是通过控制基极电流来控制集电极电流。三极管可以分为NPN型和PNP型两种,其中NPN型的三极管在基极电流为正时,集电极电流为正,而PNP型的三极管在基极电流为负时,集电极电流为负。
MOS是一种基于金属-氧化物-半导体结构的器件。它包括一个金属栅极(Gate)、一个氧化物绝缘层(Oxide)和一个半导体层(Semiconductor)。MOS的工作原理是通过控制栅极电压来改变半导体中的电荷分布,从而控制电流流动。MOS可以分为N型和P型两种,其中N型MOS(NMOS)的导通是由正栅极电压引起的,而P型MOS(PMOS)的导通是由负栅极电压引起的。
三极管和MOS在使用场景上有以下区别:
1. 三极管常用于放大器和开关电路中。由于其较大的电流放大倍数,三极管可以用来放大弱信号,并且可以用作开关来控制较大的电流。三极管的工作速度相对较慢,适用于低频应用。
2. MOS常用于集成电路中,特别是数字电路。由于其低功耗、高集成度和快速开关速度,MOS常常用于逻辑门、存储器、微处理器和其他数字电路中。MOS的主要特点是高阻抗输入和低功耗,适用于高频和高速数字应用。
总的来说,三极管和MOS具有不同的结构和工作原理,适用于不同的应用场景。三极管常用于放大器和开关电路,而MOS常用于集成电路中的数字电路。
- 单总线怎么用?
单总线是一种简化的通信架构,通过单根线路连接多个设备,并通过协议来实现设备之间的通信。以下是在使用单总线时的一般步骤:
1. 确定总线协议:选择适合应用的总线协议,如1-Wire、I2C、CAN等。总线协议定义了设备之间的通信规则和数据格式。
2. 连接设备:将需要进行通信的设备通过单根线路连接起来。单总线通常是一条串行的线路,可以是双线制(如1-Wire)或是单线制(如I2C)。
3. 设备地址分配:对于使用设备地址进行通信的协议(如I2C),需要为每个设备分配唯一的地址。这样,通信时可以通过地址来区分不同的设备。
4. 主设备控制:单总线协议中通常有一个主设备(Master),它负责控制总线上的通信操作。主设备可以是一个控制器、微处理器或其他具有通信能力的设备。
5. 通信操作:主设备使用协议规定的命令和数据格式,向从设备(Slave)发送指令或请求数据,并接收从设备返回的响应或数据。通信操作可以包括读取、写入、查询等。
6. 设备管理:在单总线上添加或移除设备时,需要进行设备的添加和移除操作,并在需要的情况下进行设备的重新配置和重新分配地址。
总线上的设备可以是传感器、执行器、存储器、显示器等。单总线的优点是使用简单、线路少、成本低,适用于一些资源受限的应用场景。但也需要注意总线带宽和传输距离的限制,以及在多设备共享单根线路时可能引起的通信冲突问题。
- 简述一下IIC总线是什么?
I2C(Inter-Integrated Circuit)总线是一种串行通信协议,用于连接多个集成电路(IC)之间进行通信。它由飞利浦(Philips)公司于1980年代开发,并成为一种常见的总线标准。
I2C总线的特点包括以下几个方面:
1. 串行通信:I2C总线使用两根线路进行串行通信,即数据线(SDA)和时钟线(SCL)。这两根线路连接了多个设备,因此可以在这些设备之间进行数据传输。
2. 主从结构:I2C总线采用主从结构,其中一个设备扮演主设备(Master)的角色,负责控制通信的发起和结束;其他设备则是从设备(Slave),负责响应主设备的命令和提供数据。
3. 设备地址:每个从设备在I2C总线上有唯一的地址,主设备通过地址来确定要与哪个从设备进行通信。地址由7位或10位组成,具体取决于总线上的设备数量。
4. 速度灵活:I2C总线的通信速度可以根据需要进行调整,常见的速度包括标准模式(100 kbps)和快速模式(400 kbps)。一些器件还支持更高的速度,如高速模式(3.4 Mbps)和超高速模式(5 Mbps)。
5. 多主模式:I2C总线还支持多主模式,即多个主设备可以存在于同一条总线上,通过仲裁机制来协调访问权。
I2C总线通常用于连接各种集成电路,如传感器、存储器、显示器、温度计、电压调节器等。它在许多应用中被广泛使用,如消费电子产品、嵌入式系统、工业自动化等领域。由于其简单、灵活和可靠的特性,I2C总线成为了一种常见的通信接口。
- 简述一下SPI总线是什么?
SPI(Serial Peripheral Interface)总线是一种串行同步通信协议,常用于连接微控制器(MCU)和外部设备之间进行通信。SPI总线由Motorola公司在1980年代开发,现在已经成为一种常见的通信标准。
SPI总线的特点包括:
1. 串行通信:SPI总线采用四根线路进行通信,包括主设备(Master)发出数据的主输出线(MOSI),主设备接收数据的主输入线(MISO),时钟线(SCK)和片选线(CS)。这些线路通过单主多从的方式连接了主设备和多个从设备(Slave)。
2. 主从结构:SPI总线通过主从结构来进行通信。主设备负责控制通信的发起和结束,向从设备发送命令和数据;从设备则负责响应主设备的命令和提供数据。
3. 无地址:与其他总线不同,SPI总线中的从设备不需要拥有唯一的地址。主设备通过片选线(CS)来选择与哪个从设备进行通信。
4. 同步通信:SPI总线采用同步通信方式,主设备通过时钟线(SCK)来产生时钟信号,从设备根据时钟信号进行数据传输。
5. 双向通信:SPI总线支持全双工通信,即主设备和从设备可以同时进行数据传输。
6. 速度灵活:SPI总线的通信速度可以根据需要进行调整,通常可以达到几百kHz到几十MHz的速度。
SPI总线通常用于连接各种外部设备,如存储器(如闪存和SRAM)、传感器(如加速度计和陀螺仪)、显示器、无线模块等。它在许多嵌入式系统和通信接口中得到广泛应用,由于其简单、高效和灵活的特性,SPI总线成为了一种常见的通信接口。
- 简述一下IIC和SPI的区别是什么?
I2C(Inter-Integrated Circuit)总线和SPI(Serial Peripheral Interface)总线是两种常见的串行通信协议,它们有以下几个主要区别:
1. 线路数量:I2C总线只需要两根线路(数据线和时钟线),而SPI总线需要四根线路(主输出线、主输入线、时钟线和片选线)。
2. 设备地址:在I2C总线上,每个从设备都有唯一的地址,主设备通过地址来选择与哪个从设备进行通信。而在SPI总线上,从设备不需要拥有唯一的地址,主设备通过片选线来选择与哪个从设备进行通信。
3. 通信模式:I2C总线是一种多主模式,多个主设备可以存在于同一条总线上,通过仲裁机制来协调访问权。而SPI总线一般只有一个主设备和多个从设备。
4. 速度:SPI总线通常比I2C总线的速度更快。SPI总线的速度可以达到几百kHz到几十MHz,而I2C总线的速度通常在几十kHz到几百kHz之间。
5. 传输距离:由于SPI总线采用的是并行通信方式,因此SPI总线的传输距离相对较短。而I2C总线采用的是串行通信方式,因此可以实现较长的传输距离。
根据应用需求和设备特性,选择使用I2C还是SPI总线进行通信。I2C总线适合于连接多个设备、传输速度相对较慢、传输距离较短的应用;SPI总线适合于速度较快、传输距离较短的应用。
- UART和USART的区别是什么?
UART和USART是两种串行通信协议,用于在微控制器和外部设备之间进行数据传输。它们有以下区别:
1. 功能:UART(通用异步收发器)是一种简单的串行通信协议,只能支持异步通信。USART(通用同步异步收发器)是一种复杂的串行通信协议,可以支持同步和异步通信。
2. 时钟:UART只使用一个引脚来传输数据,没有专门的时钟线。USART使用两个引脚,一个用于数据传输,另一个用于时钟信号传输。这使得USART能够在同步模式下进行数据传输。
3. 错误检测:USART提供了一些额外的功能,如奇偶校验和帧错误检测,以确保数据的完整性和准确性。UART通常没有这些功能。
4. 数据传输速率:由于USART支持同步模式,因此它可以在高速传输数据时提供更好的性能。UART通常用于较低的数据传输速率。
总之,UART和USART都是串行通信协议,但USART提供了更多功能和更高的性能,而UART则更简单和基本。具体使用哪种协议取决于应用的需求和硬件的支持。
- 简述一下stm32中的定时器的分类和区别是什么?
在STM32微控制器中,定时器(Timer)模块是非常重要的功能模块,用于产生精确的定时和计数操作。STM32中的定时器可以分为以下几类:
1. 基本定时器(Basic Timer):基本定时器是STM32中最简单的定时器类型,通常用于精确的计时操作。它的特点是只有一个计数器,适用于低频率的计时需求。
2. 通用定时器(General Purpose Timer):通用定时器是STM32中最常用的定时器类型,包括TIM2、TIM3、TIM4、TIM5等。它们具有多个计数器和多种工作模式,可以满足各种定时和计数需求。
3. 高级定时器(Advanced Timer):高级定时器是STM32中功能最强大的定时器类型,包括TIM1、TIM8等。它们具有更多的计数器、更高的计数频率和更多的高级功能,适用于要求更高精度和更复杂功能的应用。
4. 低功耗定时器(Low-Power Timer):低功耗定时器是专门为低功耗应用设计的定时器模块,例如在待机模式下需要进行低功耗计时的应用场景。
定时器的主要区别在于其计数器的位数、计数频率、支持的工作模式、中断和DMA触发功能等。不同类型的定时器适用于不同的应用场景,用户可以根据自己的需求选择合适的定时器进行配置和使用。
- 简述一下PWM是什么?
PWM(脉宽调制)是一种常用的电子信号调制技术,用于控制电子设备的输出电压或功率。它通过改变信号的脉冲宽度来控制输出信号的平均值。PWM信号由一个固定频率的周期性脉冲序列组成,其中脉冲的宽度(高电平持续时间)可以根据需要进行调整。
在PWM信号中,脉冲的宽度和周期决定了信号的平均值,而脉冲的占空比则决定了信号的功率或电压级别。占空比是指高电平时间(脉冲宽度)与一个周期的比例。例如,50%的占空比表示高电平时间等于低电平时间,平均值为信号的一半。
PWM技术广泛应用于各种电子设备中,如电机驱动、LED亮度调节、音频放大器、电源管理等。通过调整PWM信号的占空比,可以实现精确的控制和调节,从而满足不同的需求。
在微控制器中,通常有专门的PWM模块或定时器模块来生成PWM信号。用户可以通过配置定时器的参数,如计数频率、计数周期和脉冲宽度,来生成所需的PWM信号。
- 说一下WDT的作用是什么?
WDT(Watchdog Timer)是一种用于监视和保护系统的硬件定时器。它的作用是检测系统是否正常运行,并在系统出现故障或崩溃时采取相应的措施,以防止系统长时间停滞或进入无限循环。
WDT通常由一个独立的硬件计时器组成,它定期产生一个特定的定时器溢出中断或复位信号。系统在正常运行时会定期重置WDT计时器,如果系统由于某种原因未能重置计时器,WDT计时器将达到其预设的最大计数值。这时,WDT会触发一个中断或复位信号,强制系统重新启动或采取其他预定的操作。
WDT的主要目的是防止系统在运行过程中出现故障或陷入死循环,以确保系统的稳定性和可靠性。它可以应对软件错误、死锁、意外重启等多种系统故障情况。通过合理设置WDT的定时器溢出时间,可以根据系统的实际需求来平衡系统的可靠性和灵活性。
在嵌入式系统中,WDT通常是必不可少的一部分,特别是在关键应用中,如工控系统、医疗设备、汽车电子等。它可以提供一种安全保护机制,确保系统在异常情况下能够及时恢复正常运行。
- 简述RS-232,RS-485之间的区别是什么?
RS-232和RS-485都是常用的串行通信标准,用于在电子设备之间进行数据传输。它们之间的主要区别包括以下几点:
1. 信号电平:RS-232使用负电平表示逻辑1,正电平表示逻辑0,而RS-485使用不同电平表示逻辑1和逻辑0。RS-485通常使用差分信号,即使用两个信号线来传输数据,一个线路传输正信号,另一个线路传输负信号。
2. 传输距离:RS-232通常用于短距离通信,其最大传输距离通常为50英尺(约15米)。而RS-485通常用于长距离通信,其最大传输距离可以达到4000英尺(约1200米),甚至更远。
3. 线路拓扑:RS-232通常使用点对点的连接方式,即一对一的连接。而RS-485可以支持多个设备的连接,可以形成多主多从的网络拓扑结构。
4. 传输速率:RS-232通常支持较低的传输速率,最常见的波特率为9600 bps。而RS-485通常支持更高的传输速率,可以达到几 Mbps。
5. 抗干扰性:由于RS-485使用差分信号传输数据,具有较好的抗干扰性能,能够更好地抵御电磁干扰和噪声。而RS-232相对较差,在长距离或嘈杂环境中容易受到干扰。
总之,RS-232和RS-485是两种不同的串行通信标准,用于不同的应用场景。RS-232适用于短距离、点对点的通信,而RS-485适用于长距离、多设备的通信,并具有更高的传输速率和抗干扰能力。选择哪种标准取决于具体的通信需求和环境条件。
- 你对CAN总线的理解是什么?
CAN(Controller Area Network)总线是一种常用的串行通信协议和物理层接口,广泛应用于汽车、工业控制、航空航天等领域。它提供了高可靠性、实时性和高带宽的数据通信能力。
CAN总线的特点和优势包括:
1. 高可靠性:CAN总线采用差分信号传输,具有较好的抗干扰能力,能够在嘈杂的电磁环境中稳定运行。
2. 实时性:CAN总线具有非常快的数据传输速率,支持实时通信和快速响应,能够满足实时控制和数据传输的需求。
3. 多主多从架构:CAN总线支持多个设备的连接,可以形成多主多从的网络架构,实现设备之间的高效通信。
4. 灵活性和可扩展性:CAN总线支持分段式通信,可以根据实际需求对总线进行布线和扩展,满足不同规模和复杂度的系统需求。
5. 错误检测和纠正:CAN总线内置了很多错误检测和纠正机制,如循环冗余校验(CRC)和重传机制,能够提高数据传输的可靠性。
在汽车领域,CAN总线被广泛应用于车辆内部的各种控制和通信系统,如引擎控制单元(ECU)、制动系统、仪表盘、车载娱乐系统等。它可以实现不同设备之间的实时通信和数据交换,提高汽车系统的整体性能和可靠性。
- ADC的转换方式有哪些?
ADC(模数转换器)的转换方式有以下几种常见的类型:
1. 逐次逼近型(Successive Approximation):逐次逼近型ADC是一种常见的转换方式。它通过比较输入信号与一个逐渐逼近的参考电压的大小,逐位进行逼近,直到达到所需的精度为止。
2. 逐次逼近型带有并行加速(Parallel Accelerated Successive Approximation):此转换方式是逐次逼近型的改进版本,通过在逐次逼近过程中并行比较多个位,从而加快转换速度。
3. 逐次逼近型带有交换式电容(Switched-Capacitor Successive Approximation):此转换方式使用交换式电容来逼近参考电压,通过切换电容和比较器的连接方式,实现逐次逼近转换。
4. 逐次逼近型带有逐位逼近超前(Bit-by-Bit Successive Approximation with Bit-by-Bit Foreground):此转换方式将逐次逼近型与逐位逼近超前相结合,通过在后台对高位进行逼近,同时在前台逐位逼近低位,从而提高转换速度。
5. 逐次逼近型带有多通道转换(Successive Approximation Multi-Channel Conversion):此转换方式支持多通道输入,通过在逐次逼近过程中切换多个输入通道,实现多通道的转换。
这些转换方式在不同的应用场景中有不同的优势和适用性。用户可以根据具体的需求和性能要求选择合适的转换方式。
- 简述stm32的GPIO有哪些模式,如何去接外接设备?
STM32的GPIO(通用输入输出)引脚具有多种模式,主要包括以下几种:
1. 输入模式(Input Mode):GPIO引脚作为输入,可以读取外部设备的状态,如开关、传感器等。可以选择不同的输入模式,如浮空输入(Floating Input)、上拉输入(Pull-up Input)和下拉输入(Pull-down Input)。
2. 输出模式(Output Mode):GPIO引脚作为输出,可以控制外部设备的状态,如LED灯、电机、继电器等。可以选择不同的输出模式,如推挽输出(Push-Pull Output)和开漏输出(Open-Drain Output)。
3. 复用功能模式(Alternate Function Mode):GPIO引脚可以与其他外设功能进行复用,如串口、定时器、SPI、I2C等。通过配置GPIO的复用功能,可以将GPIO引脚连接到要使用的外设上。
4. 模拟模式(Analog Mode):GPIO引脚可以配置为模拟输入或模拟输出模式,用于连接模拟信号的输入或输出。
要接外部设备,可以按照以下步骤进行操作:
1. 配置GPIO的模式:根据外部设备的要求,选择合适的GPIO模式,如输入模式或输出模式,并设置相应的输入/输出电平、上拉/下拉等。
2. 设置引脚的复用功能:如果外部设备需要与其他功能进行复用,需要配置GPIO引脚的复用功能,将其连接到相应的外设上。
3. 连接外部设备:通过连接电路,将外部设备与所选的GPIO引脚相连。这可以通过插座、插头、焊接等方式进行。
4. 编写程序控制:通过编写适当的程序代码,控制GPIO引脚的状态,读取输入设备的状态或控制输出设备的操作。
在STM32的开发环境中,可以使用官方提供的开发工具(如STM32CubeIDE)或其他第三方开发工具进行GPIO的配置和控制。具体的操作方式和代码编写可以参考相关的开发文档和示例代码。
- 编写中断处理函数需要注意哪些问题?
在编写中断处理函数时,需要注意以下几个问题:
1. 中断优先级:每个中断都有一个优先级,确保设置正确的中断优先级,以确保高优先级的中断能够及时处理,并不会被低优先级的中断阻塞。
2. 中断嵌套:如果存在多个中断源,可能会发生中断嵌套的情况。在处理中断嵌套时,需要注意适当地启用和禁用中断,以避免竞争条件和意外的行为。
3. 中断标志清除:在中断处理函数中,应及时清除中断标志位,以确保下一次中断能够正确触发。否则,可能会导致多次触发同一中断。
4. 中断延迟:中断处理函数应尽量保持简洁和高效,避免长时间的处理或延迟操作,以确保系统能够及时响应其他中断请求。
5. 共享资源保护:如果多个中断需要访问共享资源,应使用合适的同步机制(如互斥锁、信号量等)来保护共享资源的一致性和避免竞争条件。
6. 堆栈空间:中断处理函数在中断发生时会被调用,因此需要足够的堆栈空间来保存当前上下文和临时变量。确保为中断处理函数分配足够的堆栈空间,以避免堆栈溢出问题。
7. 中断嵌套屏蔽:某些平台支持中断嵌套屏蔽功能,可以根据需要在中断处理函数中设置中断嵌套屏蔽级别,以控制不同优先级中断的相互干扰。
以上是在编写中断处理函数时需要注意的一些常见问题。具体注意事项可能会因平台、编译器和中断控制器的不同而有所差异,建议参考相关的文档和手册以获取更详细的信息。
- DMA是什么?
DMA(Direct Memory Access,直接内存访问)是一种计算机系统中的技术,用于在外设和内存之间直接进行数据传输,而不需要通过CPU的参与。它能够提高数据传输的效率和系统的性能。
在传统的数据传输方式中,CPU需要通过程序控制来实现数据的读取和写入。这种方式会消耗CPU的时间和计算资源,同时也会降低系统的响应速度。而DMA技术则可以直接将数据从外设读取到内存,或者从内存写入到外设,不需要CPU的干预。
DMA的工作流程如下:
1. 配置DMA控制器:首先,需要配置DMA控制器的寄存器,包括源地址、目的地址、传输长度、传输方向等参数。
2. 启动DMA传输:通过设置DMA控制器的启动位,将数据传输任务交给DMA控制器开始执行。
3. DMA传输:DMA控制器根据配置的参数,直接在外设和内存之间进行数据的传输,不需要CPU的干预。传输过程中,DMA控制器会监控数据的传输状态,并在传输完成后产生相应的中断或信号。
4. DMA传输完成:当DMA传输完成后,DMA控制器会产生中断或信号,通知CPU数据传输已完成。
DMA技术可以广泛应用于需要高速数据传输的场景,如音频、视频、存储设备等。通过使用DMA技术,可以提高数据传输的效率和系统的性能,减轻CPU的负担,同时也能提供更快的响应速度和更低的延迟。
- 简述推挽和开漏的区别是什么?
推挽(Push-Pull)和开漏(Open-Drain)是GPIO引脚输出模式的两种常见类型,它们在输出电路的连接方式和特性上有一些区别。
推挽输出(Push-Pull Output):
1. 在推挽输出模式下,GPIO引脚通过驱动电路同时提供高电平和低电平输出。
2. 在高电平状态下,驱动电路将引脚连接到VCC电压,提供了一个高电平的输出。
3. 在低电平状态下,驱动电路将引脚连接到地(GND),提供了一个低电平的输出。
4. 推挽输出模式具有较低的输出阻抗和较高的驱动能力,可以直接驱动负载。开漏输出(Open-Drain Output):
1. 在开漏输出模式下,GPIO引脚只能提供低电平输出,而不能直接提供高电平输出。
2. 在高电平状态下,引脚处于高阻抗状态(浮空),不连接到任何电源电压,输出电平由外部上拉电阻决定。
3. 在低电平状态下,引脚连接到地(GND),提供低电平的输出。
4. 开漏输出模式只能通过外部上拉电阻将引脚拉高至高电平,因此需要外部上拉电阻才能实现高电平输出。推挽输出和开漏输出的区别:
1. 推挽输出可以提供高电平和低电平输出,而开漏输出只能提供低电平输出。
1. 推挽输出具有较低的输出阻抗和较高的驱动能力,可以直接驱动负载,而开漏输出需要外部上拉电阻来实现高电平输出。
3. 开漏输出模式可以实现多个开漏引脚的集线器(Wired-OR)连接,通过逻辑与门或者外部上拉电阻实现多个开漏引脚的逻辑与门连接。选择推挽输出还是开漏输出取决于具体的应用需求和外部电路的连接方式。例如,如果需要驱动LED灯或其他负载,推挽输出模式通常更适合;而如果需要实现多个开漏引脚的逻辑与门连接,或者与其他外部电路的连接需要使用上拉电阻,开漏输出模式更为适合。
- 物联网的通信模块和协议是什么?
物联网的通信模块和协议有多种选择,具体的选择取决于应用场景、设备要求和通信需求等因素。以下是一些常见的物联网通信模块和协议:
1. 通信模块:
1. Wi-Fi模块:使用无线局域网(Wi-Fi)技术进行通信,适用于需要高速数据传输和较短通信距离的场景。
2. 蜂窝网络模块:如2G、3G、4G、5G模块,通过蜂窝网络实现广域网(WAN)通信,适用于远程通信和移动设备。
3. 蓝牙模块:使用蓝牙技术进行短距离通信,适用于低功耗和设备间直连的场景。
4. Zigbee模块:基于Zigbee协议的无线传感器网络(WSN)模块,适用于低功耗、低速率和大规模传感器网络的场景。
5. LoRa模块:基于LoRa技术的长距离、低功耗和低速率通信模块,适用于广域物联网应用。2. 通信协议:
1. MQTT(Message Queuing Telemetry Transport):一种轻量级的发布/订阅消息传输协议,适用于低功耗设备和不稳定网络环境。
2. CoAP(Constrained Application Protocol):一种设计用于受限设备和网络的应用层协议,适用于低功耗、低带宽和资源有限的设备。
3. HTTP(Hypertext Transfer Protocol):一种常用的应用层协议,适用于客户端-服务器通信,支持广泛的设备和应用场景。
4. AMQP(Advanced Message Queuing Protocol):一种消息传输协议,适用于可靠的消息传递和广域网通信。
5. OPC UA(Open Platform Communications Unified Architecture):一种开放的标准通信协议,适用于工业物联网和设备间通信。以上只是一些常见的通信模块和协议,实际应用中还有其他选择,如NFC、IR、Ethernet等。选择合适的通信模块和协议应根据具体的应用需求、设备要求和可用资源等因素进行评估和选择。
- 简述Nand Flash和Nor Flash的区别是什么?
NAND Flash和NOR Flash是两种常见的闪存存储器类型,它们在内部结构、工作原理和应用场景上有一些区别。
1. 内部结构:
1. NAND Flash:NAND Flash采用并行存储结构,数据以页(Page)为单位进行读写,页内部以块(Block)为单位进行擦除。NAND Flash内部有位线(Word Line)和逻辑门(Floating Gate),存储单元按矩阵排列。
2. NOR Flash:NOR Flash采用串行存储结构,数据以字节(Byte)为单位进行读写,存储单元按串行方式连接。NOR Flash内部有位线和逻辑门,存储单元按线性排列。2. 工作原理:
1. NAND Flash:NAND Flash的读操作需要通过逻辑门和位线进行,写操作则是通过电荷注入或抽取来改变逻辑门内的电荷状态。
2. NOR Flash:NOR Flash的读操作和写操作都是通过逻辑门和位线来实现,读操作通过逻辑门传递数据,写操作通过改变逻辑门内的电荷状态来存储数据。3. 读写性能:
1. NAND Flash:NAND Flash具有较高的写入速度和较低的成本,读取速度相对较慢,适用于大容量存储和数据密集型应用,如固态硬盘(SSD)。
2. NOR Flash:NOR Flash具有较快的读取速度和较低的擦除时间,但写入速度较慢,适用于小容量存储和代码存储等应用,如嵌入式系统的固件存储。4. 应用场景:
1. NAND Flash:由于其较高的密度、较低的成本和较快的写入速度,NAND Flash常用于大容量存储、移动设备、闪存卡和固态硬盘等应用。
2. NOR Flash:由于其较快的读取速度和执行代码的能力,NOR Flash常用于嵌入式系统的固件存储、启动程序存储、代码存储等应用。需要根据实际应用需求和性能要求来选择合适的闪存类型。一般而言,NAND Flash适合大容量存储和数据密集型应用,而NOR Flash适合小容量存储和代码存储等应用。
相关文章:
【ARMstm32】【华清远见西安中心】)
面试题总结(十五)【ARMstm32】【华清远见西安中心】
ARM Cortex-M,Cortex-R,Cortex-A的区别和差异是什么? ARM Cortex-M,Cortex-R和Cortex-A是ARM架构下的不同处理器系列,针对不同的应用领域和需求进行了优化和设计。它们之间的区别和差异主要体现在以下几个方面: 1. 应用领域&#…...

助听器概述
助听器概述 什么是助听器? 助听器是一种放置在耳内或耳后的小型电子设备。助听器可以放大声音,使听力损失的人能够提高他们的听力和言语理解能力。 今天有许多不同类型的助听器,包括处方助听器和非处方 (OTC) 助听器…...
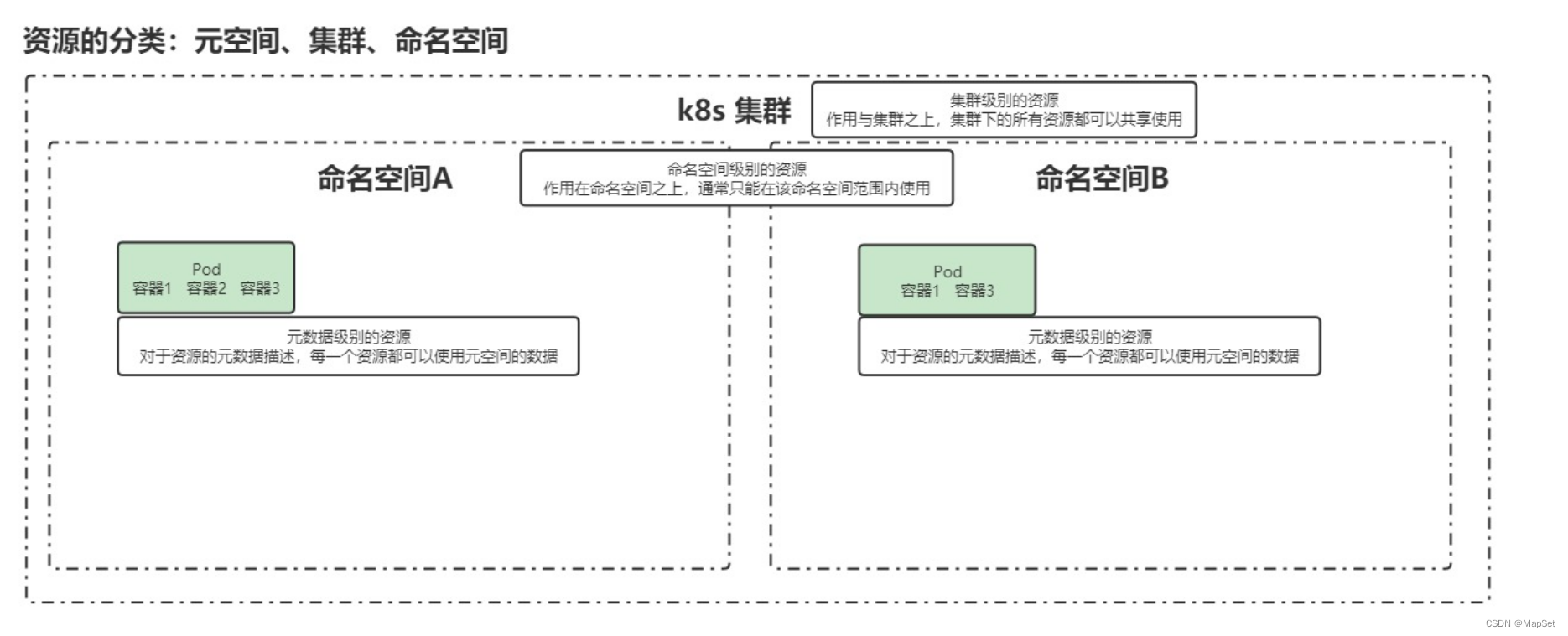
学习k8s
学习k8s 我为什么要用k8s 和其他部署方式的区别是什么? 传统部署方式 java --> package --> 放到服务器上 --> Tomcat 如果是同时进行写操作,会存在并发问题. 用户 --网络带宽–> 服务器 -->服务 同一个服务器上,多个服务: 网络资源的占用 内存的占用 cpu的占…...

iOS 将sdk更新到最新并为未添加版本号的三方库增加版本号
1、更新cocoapod sudo gem install cocoapods2、更新sdk pod update3、查看最新版本号 # 查看最新版本号 cat Podfile.lock4、增加版本号 将查询到的版本号添加到pod中 pod MJRefresh, 3.7.6...
Appium —— 初识移动APP自动化测试框架Appium
说到移动APP自动化测试,代表性的测试框架非Appium莫属,从今天开始我们将从APP结构解析、Appium框架学习、安卓/iOS自动化测试实战、自动遍历回归测试、自动化测试平台及持续集成,多个维度一起由浅入深的学废Appium 今天我们先来初步认识Appi…...

自助式可视化开发,ETLCloud的集成之路
自助式可视化开发 自助式可视化开发是指利用可视化工具和平台,使非技术人员能够自主创建、定制和部署数据分析和应用程序的过程。 传统上,数据分析和应用程序开发需要专业的编程和开发技能。但是,自助式可视化开发工具的出现,使…...
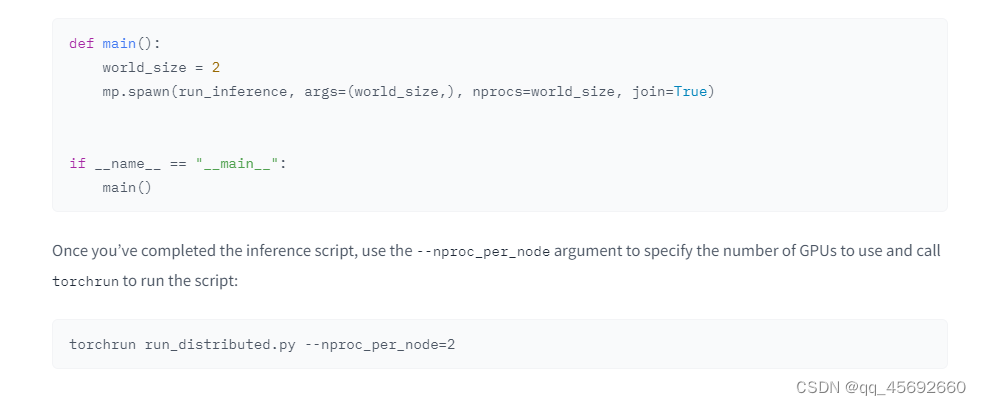
diffu-Distributed inference with multiple GPUs
pytorch的ddp...

在Python中使用Kafka帮助我们处理数据
Kafka是一个分布式的流数据平台,它可以快速地处理大量的实时数据。Python是一种广泛使用的编程语言,它具有易学易用、高效、灵活等特点。在Python中使用Kafka可以帮助我们更好地处理大量的数据。本文将介绍如何在Python中使用Kafka简单案例。 一、安装K…...

进程和线程和协程区别
目录 一、进程和线程 二、线程上下文切换 三、线程与协程区别 一、进程和线程 线程是可以由调度程序对立管理的最小程序指令集,而进程是程序运行的实例。 大多情况下,线程是进程的组成部分,一个进程中可以存在多个线程,这些线…...

银行测试:第三方支付平台业务流,功能/性能/安全测试方法
1、第三方支付平台的功能和结构特点 在信用方面,第三方支付平台作为中介,在网上交易的商家和消费者之间作一个信用的中转,通过改造支付流程来约束双方的行为,从而在一定程度上缓解彼此对双方信用的猜疑,增加对网上购物…...
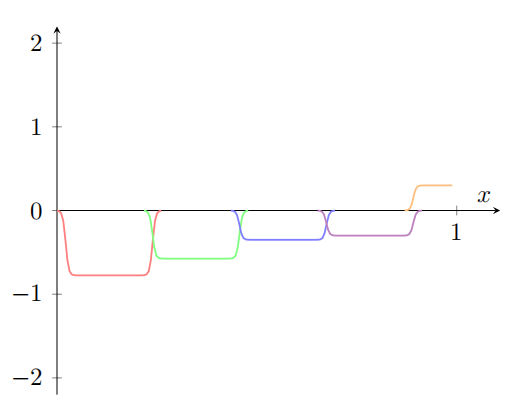
神经网络可以计算任何函数的可视化证明
神经网络可以计算任何函数的可视化证明 对于神经网络,一个显著的事实就是它可以计算任何函数。 如下:不管该函数如何,总有神经网络能够对任何可能的输入x,输出值f(x) 即使函数有很多输入和输出࿰…...
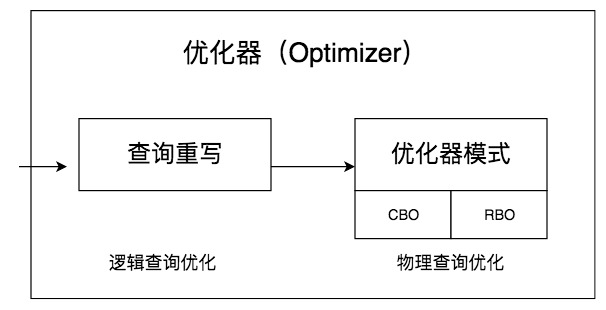
SQL进阶理论篇(十三):数据库的查询优化器是什么?
文章目录 简介什么是查询优化器查询优化器的两种优化方式总结参考文献 简介 事务可以让数据库在增删改查的过程中,保证数据的正确性和安全性,而索引可以帮数据库提升数据的查找效率。查询优化器,则是帮助我们获取更高的SQL查询性能。 本节我…...

视觉SLAM中的相机分类及用途
视觉SLAM(Simultaneous Localization and Mapping)算法主要用于机器人和自动导航系统中,用于同时进行定位和建立环境地图。这种算法依赖于相机来捕捉环境数据。根据视觉SLAM的具体需求和应用场景,可以使用不同类型的相机。以下是用…...

Gin之GORM多表关联查询(多对多;自定义预加载SQL)
数据库三个,如下: 注意:配置中间表的时候,表设计层面最好和配置的其他两张表契合,例如其他两张表为fate内的master和slave;要整合其对应关系的话,设计中间表的结构为master_id和slave_id最好(不然会涉及重写外键的操作) 重写外键(介绍) 对于 many2many 关系,连接表…...

linux 调试工具 GDB 使用
gdb是linux下常用的代码调试工具,本文记录常用命令。 被调试的应用需要使用 -g 参数进行编译,如不确定可使用如下命令查看是否支持debug readelf -S filename | grep "debug" 启动调试 gdb binFile 例如要调试sshd: 调试带参数…...

qt程序在Linux下打包的一般流程
编译 手动编写编译脚本 qmake make复制依赖库 参考文章: https://blog.csdn.net/JOBbaba/article/details/124289626 https://zhuanlan.zhihu.com/p/49919048 复制系统依赖库 编写复制脚本copy.sh ldd复制Qt依赖库 主要是libqxcb.so的相关依赖需要复制&…...
华为鸿蒙应用--欢迎页SplashPage+倒计时跳过(自适应手机和平板)-ArkTs
鸿蒙ArkTS 开发欢迎页SplashPage倒计时跳过,可自适应平板和手机: 一、SplashPage.ts import { BreakpointSystem, BreakPointType, Logger, PageConstants, StyleConstants } from ohos/common; import router from ohos.router;Entry Component struct…...

spring MVC概述和土门案例(无配置文件开发)
SpringMVC 1,SpringMVC概述2,SpringMVC入门案例2.1 需求分析2.2 案例制作步骤1:创建Maven项目步骤2:补全目录结构步骤3:导入jar包步骤4:创建配置类步骤5:创建Controller类步骤6:使用配置类替换web.xml步骤7:配置Tomcat环境步骤8:启动运行项目步骤9:浏览器…...

持续集成交付CICD:K8S 通过模板文件自动化完成前端项目应用发布
目录 一、实验 1.环境 2.GitLab 更新deployment文件 3.GitLab更新共享库前端项目CI与CD流水线 4.K8S查看前端项目版本 5.Jenkins 构建前端项目 6.Jenkins 再次构建前端项目 二、问题 1. Jenkins 构建CI 流水线报错 2. Jenkins 构建CI 流水线弹出脚本报错 3. Jenkins…...
【TB作品】51单片机 实物+仿真-电子拔河游戏_亚博 BST-M51
代码工程。 http://dt4.8tupian.net/2/28880a66b12880.pg3这段代码是用于一个数字拔河游戏的嵌入式系统,采用了基于8051架构的单片机,使用Keil C51编译器。 主要功能包括: 数码管显示:使用了四个数码管(通过P2的控制…...

为Claude Code配置Taotoken备用通道,解决访问不稳定问题
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为Claude Code配置Taotoken备用通道,解决访问不稳定问题 许多开发者将Claude Code作为日常编程助手,用于代…...

在Python项目中实现通过Taotoken轮询调用多个大模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在Python项目中实现通过Taotoken轮询调用多个大模型 基础教程类,面向中高级开发者。当你在构建一个需要灵活调用不同大…...
)
拒绝纸上谈兵!深度拆解 hello-agents:从零开始构建你的第一个智能体 (AI Agent)
发布日期: 2026-02-10标签: #AIAgent #智能体 #Datawhale #大模型 #Python #人工智能入门一、 引言如果说 2024 年是大模型的元年,那么 2026 年则是 AI Agent(智能体) 的应用爆发年。单纯的对话已经无法满足需求&#…...

深入GORM源码:手把手教你为自定义字段打造专属‘Clause钩子’
深入GORM源码:手把手教你为自定义字段打造专属‘Clause钩子’ 在当今快速迭代的业务场景中,数据库操作早已不再是简单的CRUD。当我们面对复杂的状态流转、多租户隔离或敏感数据加密时,往往需要在数据持久化层植入特定的业务逻辑。GORM作为Go生…...

ESP32开发踩坑记:从HID库缺失到PlatformIO环境搭建的全流程复盘
ESP32开发踩坑记:从HID库缺失到PlatformIO环境搭建的全流程复盘 那天深夜,我盯着屏幕上"hid.h: No such file or directory"的报错信息,意识到自己掉进了嵌入式开发的第一个坑。原本想用Arduino做个体感鼠标来提升游戏体验…...

第13天:常用数据结构之字典
Python学习100天(从入门到精通系列文章) 文章目录 Python学习100天(从入门到精通系列文章) 前言 一、为什么需要字典? 1.1 列表、元组、集合的局限性 1.2 字典的优势 二、创建和使用字典 2.1 使用字面量语法创建字典 2.2 使用 dict 函数创建字典 三、字典的常用操作 3.1 访…...
的5个实战骚操作,让你的代码更灵活)
别再只会用点号了!Python里getattr()的5个实战骚操作,让你的代码更灵活
别再只会用点号了!Python里getattr()的5个实战骚操作,让你的代码更灵活 在Python开发中,我们经常需要动态地访问对象的属性和方法。虽然直接使用点号(.)是最常见的做法,但在某些场景下,getattr()函数能带来更灵活、更优…...

Elasticsearch 查询日志:每个查询一行协调器级别日志,适用于 ES|QL、DSL、SQL 和 EQL
作者:来自 Elastic Najwa Harif 及 Valentin Crettaz 通过 Elasticsearch 查询日志,可以轻松理解查询对集群性能的影响。每个请求由一条协调器级别日志记录,覆盖 ES|QL、DSL、SQL 和 EQL,并提供完整的查询文本、追踪信息、可选用户…...

如何用开源Lenovo Legion Toolkit彻底掌控你的拯救者笔记本:技术深度解析与实战指南
如何用开源Lenovo Legion Toolkit彻底掌控你的拯救者笔记本:技术深度解析与实战指南 【免费下载链接】LenovoLegionToolkit Lightweight Lenovo Vantage and Hotkeys replacement for Lenovo Legion laptops. 项目地址: https://gitcode.com/gh_mirrors/le/Lenovo…...

Axure RP中文语言包技术深度解析:从键值对到国际化架构的工程实践
Axure RP中文语言包技术深度解析:从键值对到国际化架构的工程实践 【免费下载链接】axure-cn Chinese language file for Axure RP. Axure RP 简体中文语言包。支持 Axure 11、10、9。不定期更新。 项目地址: https://gitcode.com/gh_mirrors/ax/axure-cn 在…...