视觉SLAM中的相机分类及用途
视觉SLAM(Simultaneous Localization and Mapping)算法主要用于机器人和自动导航系统中,用于同时进行定位和建立环境地图。这种算法依赖于相机来捕捉环境数据。根据视觉SLAM的具体需求和应用场景,可以使用不同类型的相机。以下是用于视觉SLAM的几种主要相机类型及其用途:
1. 单目相机
- 特点:使用单个镜头捕捉图像。
- 用途:用于估算环境中的特征点位置。单目SLAM系统通常较为复杂,因为它们需要从单一视角的图像中推断出深度信息。
- 优势:成本低,尺寸小,适合资源受限的应用。
2. 双目相机
- 特点:使用两个平行排列的相机,模拟人类的双眼视觉。
- 用途:通过比较两个相机的图像来计算深度信息,用于更精确的三维地图构建。
- 优势:提供更准确的深度估计,适用于需要更精确空间感知的应用。
3. 深度相机(RGB-D相机)
- 特点:结合了常规的RGB相机和深度传感器(如红外或激光传感器)。
- 用途:捕捉彩色图像(RGB)和每个像素的深度信息(D),非常适合室内环境。
- 优势:能快速提供准确的深度信息,简化了SLAM算法的复杂性。
4. 全景相机
- 特点:提供360度的全景视图。
- 用途:用于捕捉全方位的环境信息,适合于需要广阔视野的SLAM应用。
- 优势:提供全方位视觉信息,有助于避免盲区。
5. 结构光相机
- 特点:通过投射特定的光模式并捕捉其在物体上的反射来测量深度。
- 用途:在特定环境中,如室内,用于精确深度估计。
- 优势:在控制环境中提供非常精确的深度信息。
6. 激光雷达相机(Lidar)
- 特点:使用激光扫描环境并测量反射信号。
- 用途:在室外和复杂环境中提供高精度的深度和空间信息。
- 优势:高精度,能在广阔和复杂环境中有效工作,但成本较高。
应用场景与选择
- 室内小型机器人:可能更适合使用RGB-D相机,因为它们提供快速且准确的深度信息。
- 室外或大型环境:激光雷达或双目相机可能更合适,因为它们在处理更大距离和复杂环境时提供更好的性能。
- 资源受限的系统:单目相机是一个经济实用的选择,尽管它们在深度估计方面的能力有限。
7.热感相机
将热感相机(红外相机)用于SLAM(Simultaneous Localization and Mapping)是一个相对不常见但具有潜力的应用。热感相机捕捉的是物体的热辐射而非可见光,这使得它们在特定环境和应用中具有独特的优势。
-
低光照或无光照环境:在光线不足或完全没有光照的环境中,如夜间或密闭空间,热感相机可以提供有用的视觉信息,因为它们依赖于物体发出的热量而不是光线。
-
通过热分布识别环境特征:热感相机可以捕捉到由于温度差异而产生的环境特征,这在某些情况下可能比可见光图像提供更多的信息。
-
在特殊环境中的导航和地图构建:例如,在消防或救援任务中,热感相机可以帮助识别热源,如人体或火源,从而在复杂或危险的环境中进行有效导航。
热感相机用于SLAM的挑战
-
有限的细节和对比度:与传统的可见光相机相比,热感图像可能缺乏细节,对比度较低,这可能使得特征提取和匹配更加困难。
-
温度变化的影响:环境温度的变化可能会影响热感图像的质量和一致性,从而影响SLAM算法的性能。
-
技术集成和算法适应性:将热感相机集成到现有的SLAM系统中可能需要对算法进行适应性修改,以处理热图像的特性。
-
应用范围限制:由于其特殊的数据类型,热感相机更适用于特定的应用场景,而不是通用的SLAM应用。
总的来说,虽然热感相机在SLAM领域提供了有趣的可能性,特别是在特殊环境中,但它们也带来了独特的挑战。在实际应用中,通常需要结合其他类型的传感器和先进的算法来克服这些挑战,实现有效的定位和地图构建。
相关文章:

视觉SLAM中的相机分类及用途
视觉SLAM(Simultaneous Localization and Mapping)算法主要用于机器人和自动导航系统中,用于同时进行定位和建立环境地图。这种算法依赖于相机来捕捉环境数据。根据视觉SLAM的具体需求和应用场景,可以使用不同类型的相机。以下是用…...

Gin之GORM多表关联查询(多对多;自定义预加载SQL)
数据库三个,如下: 注意:配置中间表的时候,表设计层面最好和配置的其他两张表契合,例如其他两张表为fate内的master和slave;要整合其对应关系的话,设计中间表的结构为master_id和slave_id最好(不然会涉及重写外键的操作) 重写外键(介绍) 对于 many2many 关系,连接表…...

linux 调试工具 GDB 使用
gdb是linux下常用的代码调试工具,本文记录常用命令。 被调试的应用需要使用 -g 参数进行编译,如不确定可使用如下命令查看是否支持debug readelf -S filename | grep "debug" 启动调试 gdb binFile 例如要调试sshd: 调试带参数…...

qt程序在Linux下打包的一般流程
编译 手动编写编译脚本 qmake make复制依赖库 参考文章: https://blog.csdn.net/JOBbaba/article/details/124289626 https://zhuanlan.zhihu.com/p/49919048 复制系统依赖库 编写复制脚本copy.sh ldd复制Qt依赖库 主要是libqxcb.so的相关依赖需要复制&…...
华为鸿蒙应用--欢迎页SplashPage+倒计时跳过(自适应手机和平板)-ArkTs
鸿蒙ArkTS 开发欢迎页SplashPage倒计时跳过,可自适应平板和手机: 一、SplashPage.ts import { BreakpointSystem, BreakPointType, Logger, PageConstants, StyleConstants } from ohos/common; import router from ohos.router;Entry Component struct…...

spring MVC概述和土门案例(无配置文件开发)
SpringMVC 1,SpringMVC概述2,SpringMVC入门案例2.1 需求分析2.2 案例制作步骤1:创建Maven项目步骤2:补全目录结构步骤3:导入jar包步骤4:创建配置类步骤5:创建Controller类步骤6:使用配置类替换web.xml步骤7:配置Tomcat环境步骤8:启动运行项目步骤9:浏览器…...

持续集成交付CICD:K8S 通过模板文件自动化完成前端项目应用发布
目录 一、实验 1.环境 2.GitLab 更新deployment文件 3.GitLab更新共享库前端项目CI与CD流水线 4.K8S查看前端项目版本 5.Jenkins 构建前端项目 6.Jenkins 再次构建前端项目 二、问题 1. Jenkins 构建CI 流水线报错 2. Jenkins 构建CI 流水线弹出脚本报错 3. Jenkins…...
【TB作品】51单片机 实物+仿真-电子拔河游戏_亚博 BST-M51
代码工程。 http://dt4.8tupian.net/2/28880a66b12880.pg3这段代码是用于一个数字拔河游戏的嵌入式系统,采用了基于8051架构的单片机,使用Keil C51编译器。 主要功能包括: 数码管显示:使用了四个数码管(通过P2的控制…...

MyBatis ${}和#{}区别
sql防注入底层jdbc类型转换当简单类型参数$不防止Statment不转换value#防止preparedStatement转换任意 除模糊匹配外,杜绝使用${} MyBatis教程,大家可以借鉴 MyBatis 教程_w3cschool 主要区别 1、#{} 是预编译处理,${} 是直接替换&#…...
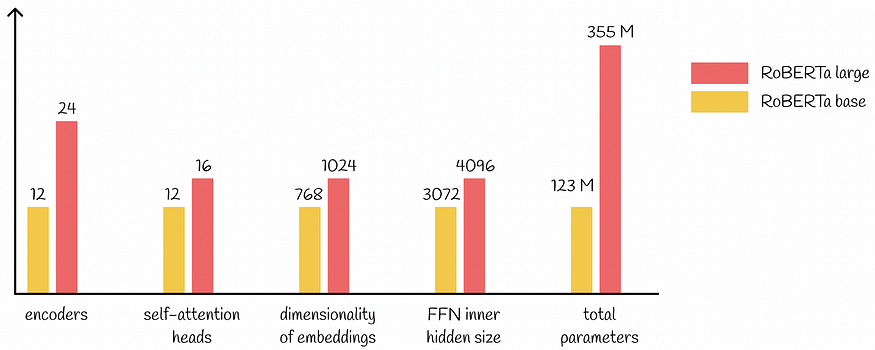
大型语言模型:RoBERTa — 一种稳健优化的 BERT 方法
slavahead 一、介绍 BERT模型的出现BERT模型带来了NLP的重大进展。 BERT 的架构源自 Transformer,它在各种下游任务上取得了最先进的结果:语言建模、下一句预测、问答、NER标记等。 尽管 BERT 性能出色,研究人员仍在继续尝试其配置࿰…...
webpack知识点总结(基础应用篇)
一、为什么需要webpack 1.为什么使用webpack ①传统的书写方式,加载太多脚本会导致网络瓶颈,如不小心改变JavaScript文件加载顺序,项目会崩溃,还会导致作用域问题、js文件太大无法做到按需加载、可读性和可维护性太低的问题。 ②…...
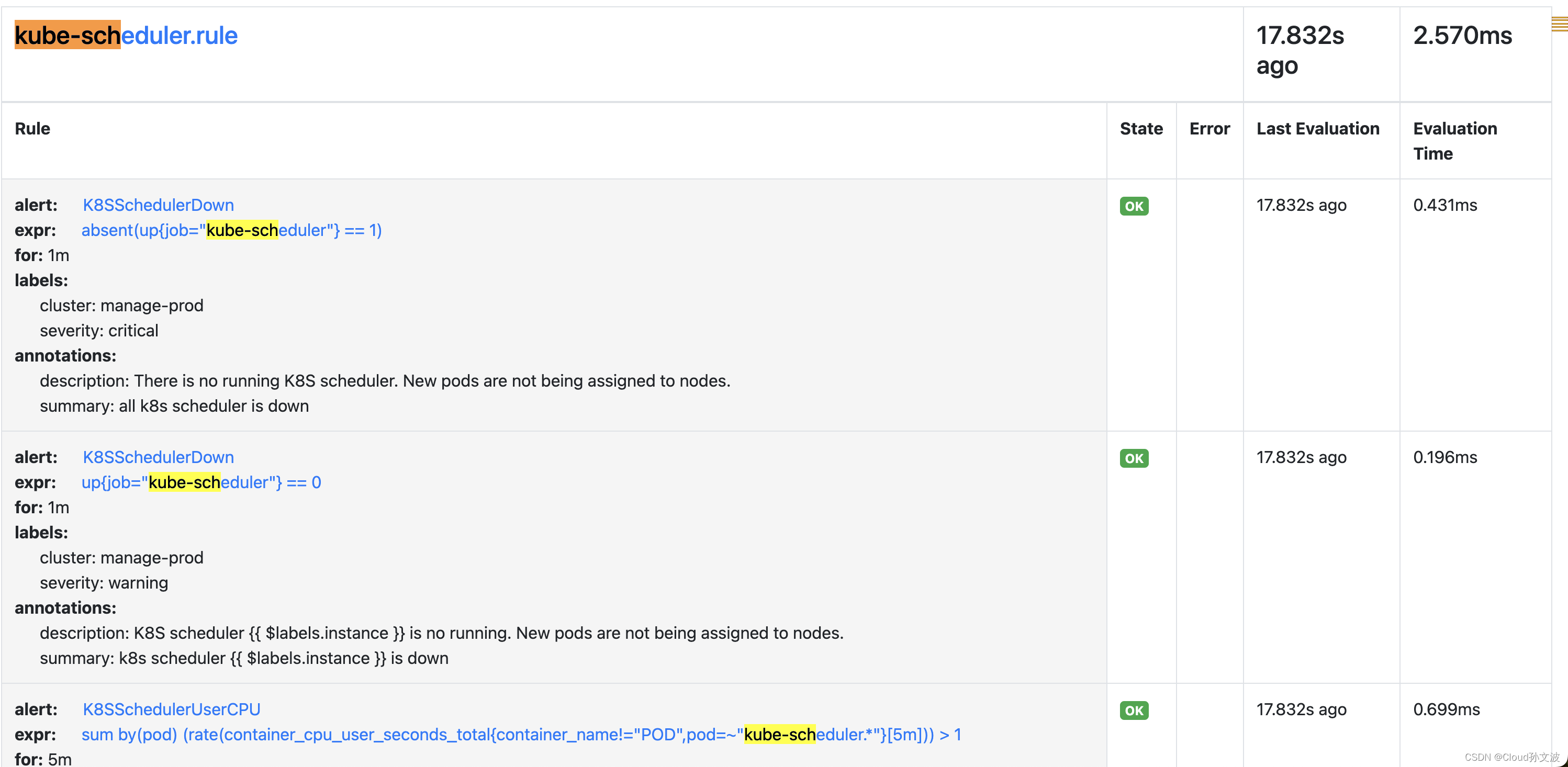
监控k8s controller和scheduler,创建serviceMonitor以及Rules
目录 一、修改kube-controller和kube-schduler的yaml文件 二、创建service、endpoint、serviceMonitor 三、Prometheus验证 四、创建PrometheusRule资源 五、Prometheus验证 直接上干货 一、修改kube-controller和kube-schduler的yaml文件 注意:修改时要一个节…...
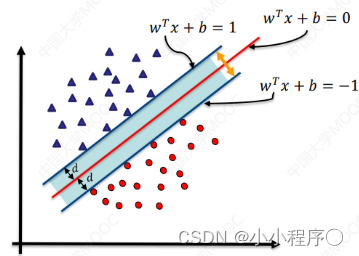
支持向量机 支持向量机概述
支持向量机概述 支持向量机 Support Vector MachineSVM ) 是一类按监督学习 ( supervisedlearning)方式对数据进行二元分类的广义线性分类器 (generalized linear classifier) ,其决策边界是对学习样本求解的最大边距超亚面 (maximum-margin hyperplane)与逻辑回归和…...
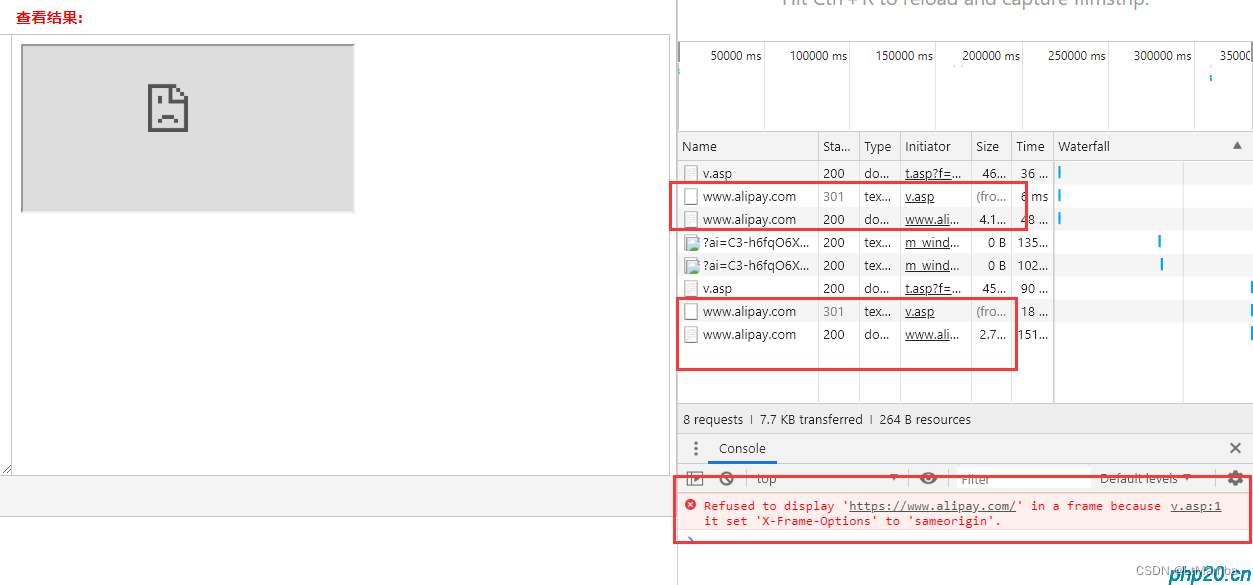
http -- 跨域问题详解(浏览器)
参考链接 参考链接 1. 跨域报错示例 Access to XMLHttpRequest at http://127.0.0.1:3000/ from origin http://localhost:3000 has been blocked by CORS policy: Response to preflight request doesnt pass access control check: No Access-Control-Allow-Origin header…...
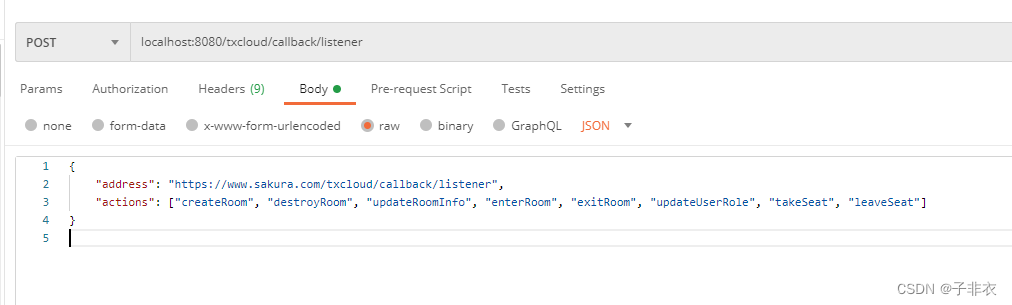
Java对接腾讯多人音视频房间回调接口示例
在前面我们已经对接好了腾讯多人音视频房间相关内容:Java对接腾讯多人音视频房间示例 为了完善业务逻辑,我们还需要对接它的一些回调接口 官方文档地址 主要就下面这些 这里因为比较简单直接上代码 里面有些工具类和上一章一样这里就没贴,需要…...
vp与vs联合开发-通过FrameGrabber连接相机
添加控件 1.CogRecordDisplay 控件 用于显示图像 初始化相机对象方法 //启动窗体时 调用初始化相机方法 //封装相机关闭方法 //窗体关闭时 调用相机关闭方法 拍照 设置采图事件 // 保存图像 设置曝光按钮事件 1.可变参数...
音视频直播核心技术介绍
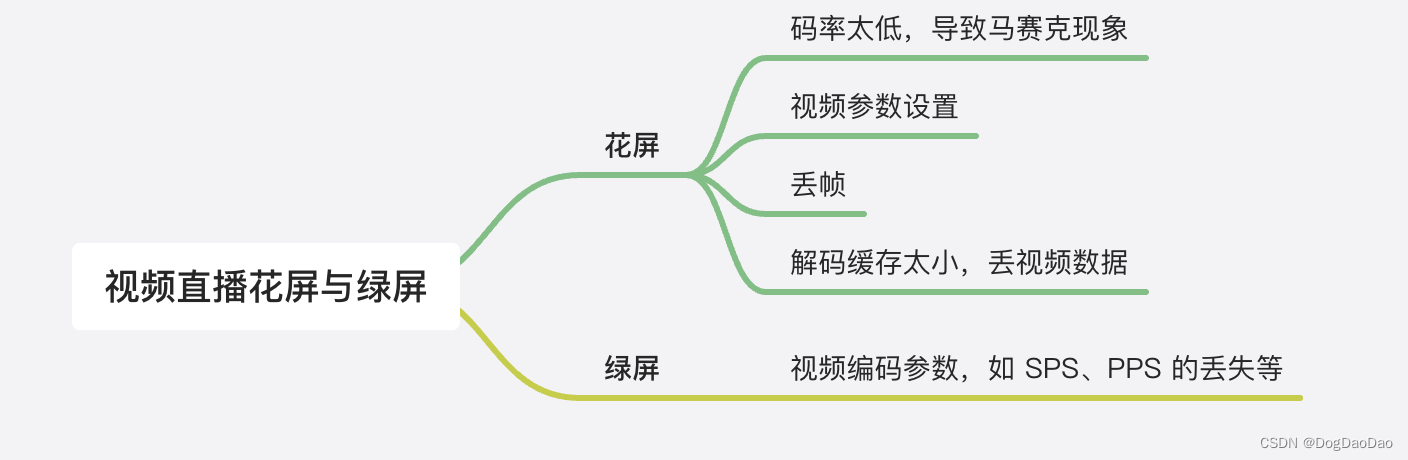
直播流程 采集: 是视频直播开始的第一个环节,用户可以通过不同的终端采集视频,比如 iOS、Android、Mac、Windows 等。 前处理:主要就是美颜美型技术,以及还有加水印、模糊、去噪、滤镜等图像处理技术等等。 编码&#…...
JNDI注入Log4jFastJson白盒审计不回显处理
目录 0x00 前言 0x01 Maven 仓库及配置 0x02 JNDI 注入简介 0x03 Java-第三方组件-Log4J&JNDI 0x04 Java-第三方组件-FastJson&反射 0x05 白盒审计 - FastJson 0x06 白盒审计 - Log4j 0x07 不回显的处理方法 0x00 前言 希望和各位大佬一起学习,如果…...

FPGA实现腐蚀和膨胀算法verilog设计及仿真 加报告
要在FPGA上实现腐蚀和膨胀算法,你可以按照以下步骤进行: 图像存储:首先,你需要设计一个图像存储器来存储待处理的图像数据。这可以采用FPGA内部存储器或外部存储器。 读取图像数据:使用适当的接口从图像存储器中读取图像数据,并将其加载到FPGA的计算单元中。 结构元素定义…...

核和值域的关系:什么是矩阵的秩?
核和值域的关系:什么是矩阵的秩? 这篇博客将介绍一个任意矩阵的核和值域的关系,并由此说明矩阵秩的意义、子空间维数、子空间正交。 1、矩阵的核:N(A) A ∈ C m n A\in C^{m\times n} A∈Cmn,矩阵的核,记…...

D3KeyHelper:5个技巧让暗黑破坏神3操作效率翻倍的智能宏工具完全指南
D3KeyHelper:5个技巧让暗黑破坏神3操作效率翻倍的智能宏工具完全指南 【免费下载链接】D3keyHelper D3KeyHelper是一个有图形界面,可自定义配置的暗黑3鼠标宏工具。 项目地址: https://gitcode.com/gh_mirrors/d3/D3keyHelper 你是否曾在《暗黑破…...
)
告别手写代码!用Simulink+STM32CubeMX给F103点个灯(保姆级图文教程)
零代码玩转STM32:Simulink与CubeMX联动的LED控制实战指南 在嵌入式开发领域,传统的手写代码方式正逐渐被模型化设计工具所革新。想象一下,只需拖拽几个功能模块,设置几个参数,就能让STM32微控制器按照你的想法工作——…...

【DSP学习】外部中断实验-基于普中DSP28335开发攻略
参考材料 普中DSP28335开发攻略 一、外部中断配置 1 失能 CPU 级中断,并初始化 PIE 控制器寄存器和 PIE 中断向量表在前面学习中断章节中,我们知道 F28335 的外设中断需通过 PIE 控制器来管理,因此需要初始化 PIE 相应的寄存器和中断向量表。…...

软件工程自动化浪潮下,工程师如何从代码生产者转型为系统架构师?
1. 软件工程的自动化浪潮:从手工艺到基础设施的必然之路最近和几个在头部大厂干了十几年的老同事聊天,话题总绕不开一个词:焦虑。不是对业务增长的焦虑,而是对自身角色价值的焦虑。一个在阿里做P8的朋友说,他团队里新来…...

长期使用Token Plan套餐,我的大模型调用成本降低了多少
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期使用Token Plan套餐,我的大模型调用成本降低了多少 1. 从按量付费到套餐订阅的转变 在深度使用大模型API进行项目…...

【限时开放】DeepSeek内部调试工具集首次对外披露:含Request ID全链路追踪、模型响应热力图与异常模式识别器
更多请点击: https://intelliparadigm.com 第一章:DeepSeek API接入开发教程 DeepSeek 提供了稳定、高性能的大模型 API 接口,支持文本生成、对话补全与函数调用等多种能力。接入前需在官方控制台申请 API Key,并确保账户已开通对…...

如何快速将STL转换为STEP:5个高效转换技巧指南
如何快速将STL转换为STEP:5个高效转换技巧指南 【免费下载链接】stltostp Convert stl files to STEP brep files 项目地址: https://gitcode.com/gh_mirrors/st/stltostp STL到STEP格式转换是3D设计和工程制造领域的关键桥梁,而stltostp正是解决…...

Erupt 七年最有诚意升级:官网、文档、脚手架更新,迈向工业级开源生态!
一、写在前面:为什么这次更新值得你重新认识 Erupt?过去几年,Erupt 一直被打上“功能强但太朴素”的标签。注解驱动、AI 模块、多 UI 模板、Cloud 集群、AI Agent,内核卷到飞起,但官网、文档、脚手架这“门面三件套”始…...

RANSAC算法调参指南:迭代次数和容差阈值到底怎么设?附Python/Matlab实例
RANSAC算法实战调参手册:从理论到代码的深度解析 在三维重建、自动驾驶和工业检测等机器视觉应用中,数据噪声和异常值一直是模型拟合的噩梦。传统最小二乘法就像一位过分认真的学生,试图让所有数据点都满意,结果却被少数离群点带偏…...

使用Node.js在虚拟机后端服务中集成Taotoken多模型调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用Node.js在虚拟机后端服务中集成Taotoken多模型调用 在虚拟机环境中部署Node.js后端服务时,直接对接多个大模型厂商…...