工业6轴机械臂运动学逆解(解析解)
工业6轴机械臂运动学逆解(解析解)
通常工业机械臂采用6旋转轴串连的形式,保证了灵活性,但为其运动学逆解(即已知机械臂末端的位姿 P P P,求机械臂各个旋转轴的旋转角)带来了较大的困难,通常没有解析解。为了提高实时性,经过前辈们不懈的研究,当6轴机械臂满足pieper准则时,可以得出其运动学逆解的解析解。pieper准则如下:
- 三个相邻关节轴线交于一点,如fanuc m10系列;
- 三个相邻关节轴线相互平行,如ur5系列;
以下将通过一个简单实例,介绍机械臂在pieper第一准则的情况的运动学逆解。
机械臂运动学模型
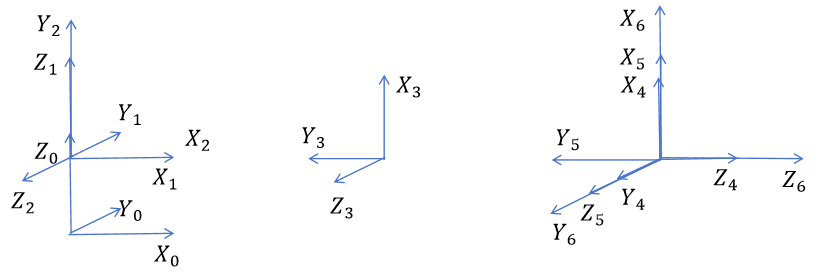
机械臂的简化模型如图1所示。
采用DH矩阵的形式对机械臂进行建模,DH矩阵如下:
| 关节 | 连杆夹角 | 连杆长度 | 连杆偏距 | 初始关节角 |
|---|---|---|---|---|
| 1 | 0 | 0 | 0.1 | 0 |
| 2 | 0.5 π \pi π | 0 | 0 | 0 |
| 3 | 0 | 0.5 | 0 | 0.5 π \pi π |
| 4 | 0.5 π \pi π | 0 | 0.5 | 0 |
| 5 | -0.5 π \pi π | 0 | 0 | 0 |
| 6 | 0.5 π \pi π | 0 | 0 | 0 |
从图1中可以看出,在初始状态下,机械臂的第2、3关节轴与基座坐标系的Y轴相互平行,机械臂的第4、5、6关节轴线相交于一点 P P P,满足pieper第一准则,且点 P P P与基座坐标系的XOZ平面重合。在这些条件下,虽然限制了机械臂的设计和构型,但极大地简化了逆解的过程。
运动学逆解
由于机械臂的结构比较简单,故采用几何法的方式求解机械臂的运动学逆解。
机械臂末端初始位姿 P 0 P_0 P0,运动学逆解末端的位姿 P ( x , y , z ) P(x,y,z) P(x,y,z)
求解第1关节轴的关节角
以基坐标系为参考,机械臂末端位置示意图如图2所示。
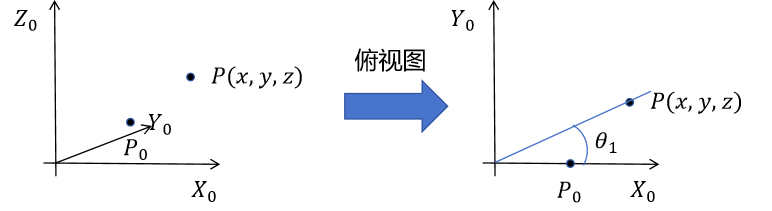
在图1中,点 P 0 P_0 P0为机械臂末端的初始状态位置(当前位置),点 P P P为机械臂末端的期望位置,由于初始状态时,机械臂末端的初始位置与 X 0 Y 0 X_0Y_0 X0Y0平面重合,故关节轴1需要旋转 θ 1 \theta_1 θ1或 θ 1 + π \theta_1 + \pi θ1+π才能使期望位置 P P P与 X 0 Y 0 X_0Y_0 X0Y0平面重合,故,关节轴1存在两个解
θ 1 = { a t a n 2 ( y , x ) a t a n 2 ( y , x ) + π (1) \theta_1 = \begin{cases} atan2(y, x)\\ atan2(y, x) + \pi\\ \end{cases} \tag1 θ1={atan2(y,x)atan2(y,x)+π(1)
求解第2、3关节轴的关节角
关节轴1经过旋转 θ 1 = a t a n 2 ( y , x ) \theta_1=atan2(y, x) θ1=atan2(y,x)角度,以第一关节轴的坐标系为参考,得示意图如图3所示。 P 1 P_1 P1为机械臂末端的当前位置, P P P为末端期望位置, O A 0 OA_0 OA0、 O A 1 OA_1 OA1为机械臂的第2连杆, A 0 P A_0P A0P、 A 1 P A_1P A1P为机械臂的第3连杆。
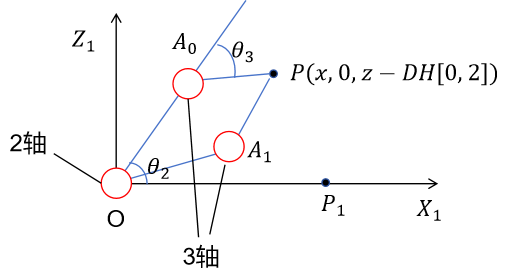
设 A 0 ( x 0 , 0 , z 0 ) A_0(x_0, 0, z_0) A0(x0,0,z0),可得方程:
x 0 2 + z 0 2 = D H [ 2 , 1 ] 2 ( x − x 0 ) 2 + ( z − D H [ 0 , 2 ] − z 0 ) 2 = D H [ 3 , 2 ] 2 (2) x_0^2 + z_0^2 = DH[2, 1]^2\\ (x - x_0)^2 + (z - DH[0, 2] - z_0)^2 = DH[3, 2]^2 \tag2 x02+z02=DH[2,1]2(x−x0)2+(z−DH[0,2]−z0)2=DH[3,2]2(2)
对2元2次方程组(2)进行求解,得 ( x 00 , z 00 ) (x_{00}, z_{00}) (x00,z00)、 ( x 01 , z 01 ) (x_{01}, z_{01}) (x01,z01)、 ( x 02 , z 02 ) (x_{02}, z_{02}) (x02,z02)、 ( x 03 , z 03 ) (x_{03}, z_{03}) (x03,z03)四组解,去除其中的非实数解。由此可得到关节轴2、3的旋转角。
θ 2 = a t a n 2 ( z 0 , x 0 ) θ 3 = a t a n 2 ( z − D H [ 0 , 2 ] − z 0 , x − x 0 ) − a t a n 2 ( z 0 , x 0 ) (2) \theta_2 = atan2(z_0, x_0)\\ \theta_3 = atan2(z - DH[0, 2] - z_0, x - x_0) - atan2(z_0, x_0) \tag2 θ2=atan2(z0,x0)θ3=atan2(z−DH[0,2]−z0,x−x0)−atan2(z0,x0)(2)
如图2所示,解方程(2),可得到关节角 θ 2 \theta_2 θ2、 θ 3 \theta_3 θ3的两组解。
同理,当取 θ 1 = a t a n 2 ( y , x ) + π \theta_1=atan2(y, x) + \pi θ1=atan2(y,x)+π时,亦可得到关节角 θ 2 \theta_2 θ2、 θ 3 \theta_3 θ3的两组解。
至此, θ 1 \theta_1 θ1、 θ 2 \theta_2 θ2、 θ 3 \theta_3 θ3存在8组解,可去除其中相同的解。
求解第4、5、6关节轴的关节角
经过对机械臂前3根轴的旋转,已经机械臂的末端位置与期望的末端位置相重合,由于关节轴4、5、6相交与末端位置,对此3轴的旋转不会改变末端的位置,故,单独对此3轴进行姿态解算即可得到关节角。
设 R 1 ( θ 1 ) R_1(\theta_1) R1(θ1)、 R 2 ( θ 2 ) R_2(\theta_2) R2(θ2)、 R 3 ( θ 3 ) R_3(\theta_3) R3(θ3)、 R 4 ( θ 4 ) R_4(\theta_4) R4(θ4)、 R 5 ( θ 5 ) R_5(\theta_5) R5(θ5)、 R 6 ( θ 6 ) R_6(\theta_6) R6(θ6)表示各轴的变换矩阵。将对关节轴4、5、6的旋转看成是动欧拉角ZYZ的旋转模式,其旋转矩阵为 R ( θ 4 , θ 5 , θ 6 ) R(\theta_4,\theta_5,\theta_6) R(θ4,θ5,θ6)。
R ( θ 4 , θ 5 , θ 6 ) = [ c o s θ 4 − s i n θ 4 0 s i n θ 4 c o s θ 4 0 0 0 1 ] [ c o s θ 5 0 s i n θ 5 0 1 0 − s i n θ 5 0 c o s θ 5 ] [ c o s θ 6 − s i n θ 6 0 s i n θ 6 c o s θ 6 0 0 0 1 ] (3) R(\theta_4,\theta_5,\theta_6) = \begin{bmatrix} cos\theta_4&-sin\theta_4&0\\ sin\theta_4&cos\theta_4&0\\ 0&0&1\\ \end{bmatrix} \begin{bmatrix} cos\theta_5&0&sin\theta_5\\ 0&1&0\\ -sin\theta_5&0&cos\theta_5\\ \end{bmatrix} \begin{bmatrix} cos\theta_6&-sin\theta_6&0\\ sin\theta_6&cos\theta_6&0\\ 0&0&1\\ \end{bmatrix} \tag3 R(θ4,θ5,θ6)= cosθ4sinθ40−sinθ4cosθ40001 cosθ50−sinθ5010sinθ50cosθ5 cosθ6sinθ60−sinθ6cosθ60001 (3)
具体计算得:
R ( θ 4 , θ 5 , θ 6 ) = [ c o s θ 4 c o s θ 5 c o s θ 6 − s i n θ 4 s i n θ 6 − c o s θ 4 c o s θ 5 s i n θ 6 − s i n θ 4 c o s c o s θ 6 θ 4 s i n θ 5 s i n θ 4 c o s θ 5 c o s θ 6 + c o s θ 4 s i n θ 6 − s i n θ 4 c o s θ 5 s i n θ 6 + c o s θ 4 c o s θ 6 s i n θ 4 s i n θ 5 − s i n θ 5 c o s θ 6 s i n θ 5 s i n θ 6 c o s θ 5 ] (4) R(\theta_4,\theta_5,\theta_6) = \begin{bmatrix} cos\theta_4cos\theta_5cos\theta_6-sin\theta_4sin\theta_6&-cos\theta_4cos\theta_5sin\theta_6-sin\theta_4cos&cos\theta_6\theta_4sin\theta_5\\ sin\theta_4cos\theta_5cos\theta_6+cos\theta_4sin\theta_6&-sin\theta_4cos\theta_5sin\theta_6+cos\theta_4cos\theta_6&sin\theta_4sin\theta_5\\ -sin\theta_5cos\theta_6&sin\theta_5sin\theta_6&cos\theta_5\\ \end{bmatrix} \tag4 R(θ4,θ5,θ6)= cosθ4cosθ5cosθ6−sinθ4sinθ6sinθ4cosθ5cosθ6+cosθ4sinθ6−sinθ5cosθ6−cosθ4cosθ5sinθ6−sinθ4cos−sinθ4cosθ5sinθ6+cosθ4cosθ6sinθ5sinθ6cosθ6θ4sinθ5sinθ4sinθ5cosθ5 (4)
由机械臂的正运动学可得:
R ( θ 1 ) R ( θ 2 ) R ( θ 3 ) R ( θ 4 = 0 ) R ( θ 4 , θ 5 , θ 6 ) = R P (5) R(\theta_1)R(\theta_2)R(\theta_3)R(\theta_4=0)R(\theta_4, \theta_5, \theta_6)=R_P \tag5 R(θ1)R(θ2)R(θ3)R(θ4=0)R(θ4,θ5,θ6)=RP(5)
在公式(5)中, R P R_P RP为机械臂末端点 P P P的姿态。对公式(5)进行移项得:
R ( θ 4 , θ 5 , θ 6 ) = [ R ( θ 1 ) R ( θ 2 ) R ( θ 3 ) R ( θ 4 = 0 ) ] − 1 R P = [ r 11 r 12 r 13 r 21 r 22 r 23 r 31 r 32 r 33 ] (6) R(\theta_4, \theta_5, \theta_6)=[R(\theta_1)R(\theta_2)R(\theta_3)R(\theta_4=0)]^{-1}R_P= \begin{bmatrix} r_{11}&r_{12}&r_{13}\\ r_{21}&r_{22}&r_{23}\\ r_{31}&r_{32}&r_{33}\\ \end{bmatrix} \tag6 R(θ4,θ5,θ6)=[R(θ1)R(θ2)R(θ3)R(θ4=0)]−1RP= r11r21r31r12r22r32r13r23r33 (6)
联立公式(4)(6)可得两组解:
{ θ 4 = a t a n 2 ( r 23 , r 13 ) θ 5 = a t a n 2 ( s q r t ( r 31 2 + r 32 2 ) , r 33 ) θ 6 = a t a n 2 ( r 32 , − r 31 ) (7) \begin{cases} \theta_4=atan2(r_{23}, r_{13})\\ \theta_5=atan2(sqrt(r_{31}^2+r_{32}^2), r_{33})\\ \theta_6=atan2(r_{32}, -r_{31}) \end{cases} \tag7 ⎩ ⎨ ⎧θ4=atan2(r23,r13)θ5=atan2(sqrt(r312+r322),r33)θ6=atan2(r32,−r31)(7)
{ θ 4 = a t a n 2 ( r 23 , r 13 ) + π θ 5 = − a t a n 2 ( s q r t ( r 31 2 + r 32 2 ) , r 33 ) θ 6 = a t a n 2 ( r 32 , − r 31 ) + π (8) \begin{cases} \theta_4=atan2(r_{23}, r_{13}) + \pi\\ \theta_5=-atan2(sqrt(r_{31}^2+r_{32}^2), r_{33})\\ \theta_6=atan2(r_{32}, -r_{31}) + \pi \end{cases} \tag8 ⎩ ⎨ ⎧θ4=atan2(r23,r13)+πθ5=−atan2(sqrt(r312+r322),r33)θ6=atan2(r32,−r31)+π(8)
综上,完成机械臂的运动学逆解的解析解求解过程,可能存在8个以上的解,可根据一些约束调节对求得的解进行删选,如关节限位、碰撞检测等。
示例程序
import numpy as np
import math
from pyquaternion import Quaternionnp.set_printoptions(suppress=True)# DH矩阵每列的含义:连杆夹角、连杆长度、连杆偏距、初始关节角
DH = np.mat([[ 0, 0, 0.1, 0], [ 0.5 * math.pi, 0, 0, 0], [ 0, 0.5, 0, 0.5 * math.pi], [ 0.5 * math.pi, 0, 0.5, 0], [-0.5 * math.pi, 0, 0, 0], [ 0.5 * math.pi, 0, 0, 0]])def transformToMatrix(alpha, a, d, theta):T0 = np.eye(4)T1 = np.mat([[1, 0, 0, 0], [0, math.cos(alpha), -math.sin(alpha), 0], [0, math.sin(alpha), math.cos(alpha), 0], [0, 0, 0, 1]])T2 = np.mat([[1, 0, 0, a], [0, 1, 0, 0], [0, 0, 1, d], [0, 0, 0, 1]])T3 = np.mat([[math.cos(theta), -math.sin(theta), 0, 0], [math.sin(theta), math.cos(theta), 0, 0], [ 0, 0, 1, 0], [ 0, 0, 0, 1]])return T1 * T2 * T3def forwardKinematic(DH, j0, j1, j2, j3, j4, j5):T0 = transformToMatrix(DH[0, 0], DH[0, 1], DH[0, 2], DH[0, 3] + j0)T1 = transformToMatrix(DH[1, 0], DH[1, 1], DH[1, 2], DH[1, 3] + j1)T2 = transformToMatrix(DH[2, 0], DH[2, 1], DH[2, 2], DH[2, 3] + j2)T3 = transformToMatrix(DH[3, 0], DH[3, 1], DH[3, 2], DH[3, 3] + j3)T4 = transformToMatrix(DH[4, 0], DH[4, 1], DH[4, 2], DH[4, 3] + j4)T5 = transformToMatrix(DH[5, 0], DH[5, 1], DH[5, 2], DH[5, 3] + j5)#print(T0 * T1 * T2 * T3 * T4 * T5)return T0 * T1 * T2 * T3 * T4 * T5def calcu3ForwardJointAngle(DH, j0, x0, y0, x, y, b, js):if abs((x0 - x) * (x0 - x) + (y0 - y) * (y0 - y) - b*b) < 0.0001:js.append([j0])js[-1].append(math.atan2(y0, x0))js[-1].append(math.atan2(y - y0, x - x0) - math.atan2(y0, x0) + 0.5 * math.pi - DH[2, 3])js.append([j0 + math.pi])js[-1].append(math.pi - math.atan2(y0, x0))js[-1].append(math.atan2(y0, x0) - math.atan2(y - y0, x - x0) + 0.5 * math.pi - DH[2, 3])if abs((x0 - x) * (x0 - x) + (-y0 - y) * (-y0 - y) - b*b) < 0.0001:js.append([j0])js[-1].append(math.atan2(-y0, x0))js[-1].append(math.atan2(y + y0, x - x0) - math.atan2(-y0, x0) + 0.5 * math.pi - DH[2, 3])js.append([j0 + math.pi])js[-1].append(math.pi - math.atan2(-y0, x0))js[-1].append(math.atan2(-y0, x0) - math.atan2(y + y0, x - x0) + 0.5 * math.pi - DH[2, 3])def quaternionToRotationMatrix(x, y, z, w):# a = math.sqrt(x*x + y*y + z*z)# if a == 0:# return np.eye(3)# v1x = 0# v1y = -z# v1z = y# b = math.sqrt(v1x*v1x + v1y*v1y + v1z*v1z)# if b == 0:# v1y = 1.0# v1z = 0.0# b = 1.0# v2 = np.cross(np.array([x, y, z]), np.array([v1x, v1y, v1z]))# #print(np.array([x, y, z]), np.array([v1x, v1y, v1z]), v2)# c = math.sqrt(v2[0]*v2[0] + v2[1]*v2[1] + v2[2]*v2[2])# R01 = np.mat([[x / a, v1x / b, v2[0] / c],# [y / a, v1y / b, v2[1] / c],# [z / a, v1z / b, v2[2] / c]])# theta = 2 * math.acos(w)# #print(R01)# R12 = np.mat([[1, 0, 0],# [0, math.cos(theta), -math.sin(theta)],# [0, math.sin(theta), math.cos(theta)]])# return R01 * R12 * np.linalg.inv(R01)a = math.sqrt(x*x + y*y + z*z + w*w)if a == 0:print('quaternion is error')return np.eye(3)x = x / ay = y / az = z / aw = w / areturn np.mat([[1 - 2*y*y - 2*z*z, 2*x*y - 2*z*w, 2*x*z + 2*y*w],[ 2*x*y + 2*z*w, 1 - 2*x*x - 2*z*z, 2*y*z - 2*x*w],[ 2*x*z - 2*y*w, 2*y*z + 2*x*w, 1 - 2*x*x - 2*y*y]])def rotateMatrixToQuaternion(R):R1 = [[R[0, 0], R[0, 1], R[0, 2]],[R[1, 0], R[1, 1], R[1, 2]],[R[2, 0], R[2, 1], R[2, 2]]]q = Quaternion(matrix=np.array(R1))return q.x, q.y, q.z, q.wdef inverseKinematic(DH, x, y, z, ox, oy, oz, ow):q_length = math.sqrt(ox*ox + oy*oy + oz*oz + ow*ow)if q_length == 0:print('quaternion is error')returnelse:ox = ox / q_lengthoy = oy / q_lengthoz = oz / q_lengthow = ow / q_lengthjs = []j00 = math.atan2(y, x)a = DH[2, 1]b = DH[3, 2]c = math.sqrt(x*x + y*y + (z - DH[0, 2])*(z - DH[0, 2]))a0 = 4*(x*x+y*y) + 4*(z - DH[0, 2])*(z - DH[0, 2])a1 = -4*(a*a - b*b + c*c)*math.sqrt(x*x + y*y)a2 = (a*a - b*b + c*c) * (a*a - b*b + c*c) - 4 * (z - DH[0, 2]) * (z - DH[0, 2]) * a * aif a1*a1 - 4*a0*a2 > 0:x0 = (-a1 + math.sqrt(a1*a1 - 4*a0*a2)) / (2 * a0)y0 = math.sqrt(a*a - x0*x0)#print('x0: ', x0, 'y0: ', y0)calcu3ForwardJointAngle(DH, j00, x0, y0, math.sqrt(x*x+y*y), z - DH[0, 2], b, js)x0 = (-a1 - math.sqrt(a1*a1 - 4*a0*a2)) / (2 * a0)y0 = math.sqrt(a*a - x0*x0)#print('x1: ', x0, 'y1: ', y0)calcu3ForwardJointAngle(DH, j00, x0, y0, math.sqrt(x*x+y*y), z - DH[0, 2], b, js)elif a1*a1 - 4*a0*a2 == 0:x0 = (-a1) / (2 * a0)y0 = math.sqrt(a*a - x0*x0)#print('x0: ', x0, 'y0: ', y0)calcu3ForwardJointAngle(DH, j00, x0, y0, math.sqrt(x*x+y*y), z - DH[0, 2], b, js)else:print('no solve')js = [[]]new_js = []for j in js:R = quaternionToRotationMatrix(ox, oy, oz, ow)T01 = transformToMatrix(DH[0, 0], DH[0, 1], DH[0, 2], DH[0, 3] + j[0])T12 = transformToMatrix(DH[1, 0], DH[1, 1], DH[1, 2], DH[1, 3] + j[1])T23 = transformToMatrix(DH[2, 0], DH[2, 1], DH[2, 2], DH[2, 3] + j[2])T34 = transformToMatrix(DH[3, 0], DH[3, 1], DH[3, 2], DH[3, 3])R01 = np.mat([[T01[0, 0], T01[0, 1], T01[0, 2]],[T01[1, 0], T01[1, 1], T01[1, 2]],[T01[2, 0], T01[2, 1], T01[2, 2]]])R12 = np.mat([[T12[0, 0], T12[0, 1], T12[0, 2]],[T12[1, 0], T12[1, 1], T12[1, 2]],[T12[2, 0], T12[2, 1], T12[2, 2]]])R23 = np.mat([[T23[0, 0], T23[0, 1], T23[0, 2]],[T23[1, 0], T23[1, 1], T23[1, 2]],[T23[2, 0], T23[2, 1], T23[2, 2]]])R34 = np.mat([[T34[0, 0], T34[0, 1], T34[0, 2]],[T34[1, 0], T34[1, 1], T34[1, 2]],[T34[2, 0], T34[2, 1], T34[2, 2]]])R = (R34.T) * (R23.T) * (R12.T) * (R01.T) * R#print('RRRRRRRRR: \n', R)alpha = math.atan2(R[1, 2], R[0, 2])betla = math.atan2(math.sqrt(R[2, 0]*R[2, 0] + R[2, 1]*R[2, 1]), R[2, 2])gamal = math.atan2(R[2, 1], -R[2, 0])new_js.append([])new_js[-1].append(j[0])new_js[-1].append(j[1])new_js[-1].append(j[2])new_js[-1].append(alpha)new_js[-1].append(betla)new_js[-1].append(gamal)#print(new_js[-1])new_js.append([])new_js[-1].append(j[0])new_js[-1].append(j[1])new_js[-1].append(j[2])new_js[-1].append(alpha + math.pi)new_js[-1].append(-betla)new_js[-1].append(gamal + math.pi)#print(new_js[-1])return new_jsif __name__ == '__main__':print("hello world")#print(DH)print(forwardKinematic(DH, 1, 0, 0, 0, 0, 0))js = inverseKinematic(DH, 0.5, 0.11, 0.26, 0.0, 0.0, 0.8, 0.6)print('##########################')for j in js:print('joint angle: ', j)T = forwardKinematic(DH, j[0], j[1], j[2], j[3], j[4], j[5])#print('P: ', T[0, 3], T[1, 3], T[2, 3])#print('Q: ', rotateMatrixToQuaternion(T))print('##########################')
注意实现
- 此运动学逆解求解器不具备通用性,只适用于满足以上DH矩阵格式的6轴串联机器人;
- 示例程序中,没有对所求的解进行筛选,存在超出限位、碰撞的情况;
- 在求解2元2次方程组时,注意其中的非实数解;
相关文章:
工业6轴机械臂运动学逆解(解析解)
工业6轴机械臂运动学逆解(解析解) 通常工业机械臂采用6旋转轴串连的形式,保证了灵活性,但为其运动学逆解(即已知机械臂末端的位姿 P P P,求机械臂各个旋转轴的旋转角)带来了较大的困难ÿ…...
管理类联考——数学——真题篇——按题型分类——充分性判断题——蒙猜A/B
老规矩,看目录,平均3-5题 文章目录 A/B2023真题(2023-19)-A-选项特点:两个等号;-判断需联立的难易:难,看着感觉需要联立,所以判断联立需要有理论支撑,不然还…...
为什么GRU和LSTM能够缓解梯度消失或梯度爆炸问题?
1、什么是梯度消失(gradient vanishing)? 参数更新过小,在每次更新时几乎不会移动,导致模型无法学习。 2、什么是梯度爆炸(gradient exploding)? 参数更新过小大,破坏了…...

【力扣100】146.LRU缓存
添加链接描述 class DLinkedNode:def __init__(self, key0, value0):self.key keyself.value valueself.prev Noneself.next Noneclass LRUCache:def __init__(self, capacity: int):self.cache dict()# 使用伪头部和伪尾部节点 self.head DLinkedNode()self.tail D…...
【Vue中给输入框加入js验证_blur失去焦点进行校验】
【Vue中给输入框加入js验证_blur失去焦点进行校验】 通俗一点就是给输入框加个光标离开当前文本输入框时,然后对当前文本框内容进行校验判断 具体如下: 1.先给文本框加属性 blur“validatePhoneNumber” <el-input v-model“entity.telephone” blur…...
vue3项目引入电子签名(可横屏竖屏)
实现效果:(左边横屏,右边竖屏) 前言:【使用开源项目smooth-signature 实现签名的功能。Gitee 地址是 :GitHub - linjc/smooth-signature: H5带笔锋手写签名,支持PC端和移动端,任何前…...
、count(1)、count(主键)、count(字段)的区别)
mysql中count(*)、count(1)、count(主键)、count(字段)的区别
文章目录 count函数的语义count(主键)count(1)count(*)count(字段)替代方案explain或者show table status中间表或者其他数据库计数 以下分析都是基于 select count(?) from table 这个语句来分析,不带过滤条件。 count函数的语义 count() 是一个聚合函数&#x…...

Nginx生成自签名证书从而添加域名的HTTPS访问
数字证书 ## 原理参考 https://mysticaldream.github.io/2023/05/certificate/## https://blog.csdn.net/m0_52440465/article/details/130713591 简介 数字证书是由证书颁发机构(CA)签名并颁发的电子文件,用于建立网络连接的身份认证和加密通信。SSL 证书是数字证书的一种。…...

无框架Java转go语言写http与tcp请求
项目地址 https://github.com/cmdch2017/http_tcpServer 项目结构 如何快速上手 http篇 1、controller包就相当于RestController,这里返回了一个Person对象,当你需要新建一个接口时,再新写一个func仿照下面的方法就行了 package control…...
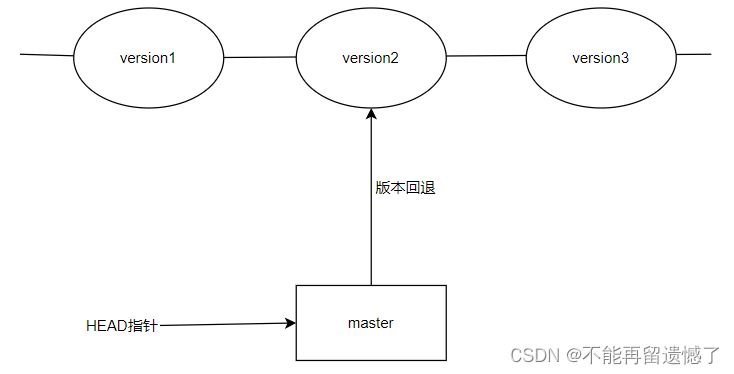
【Git】Git基本操作
文章目录 Git 是什么Git 的优点Git 安装Linux UbuntuLinux CentOsWindows Git 基本操作1. 创建 Git 本地仓库2. 配置 Git3. Git工作区、暂存区和版本库4. 添加文件5. 查看 .git 文件6. 修改文件7. 版本回退 Git 是什么 Git是一个免费的、开源的分布式版本控制系统,…...

JavaSE学习笔记 Day20
JavaSE学习笔记 Day20 个人整理非商业用途,欢迎探讨与指正!! 上一篇 文章目录 JavaSE学习笔记 Day20十七、数据结构与算法17.1算法17.1.1冒泡排序17.1.2选择排序17.1.3插入排序17.1.4三个排序的区别 17.2顺序表17.2.1顺序表代码实现17.2.2顺…...
【蓝桥杯选拔赛真题52】python空调模式 第十四届青少年组蓝桥杯python 选拔赛比赛真题解析
目录 python空调模式 一、题目要求 1、编程实现 2、输入输出...
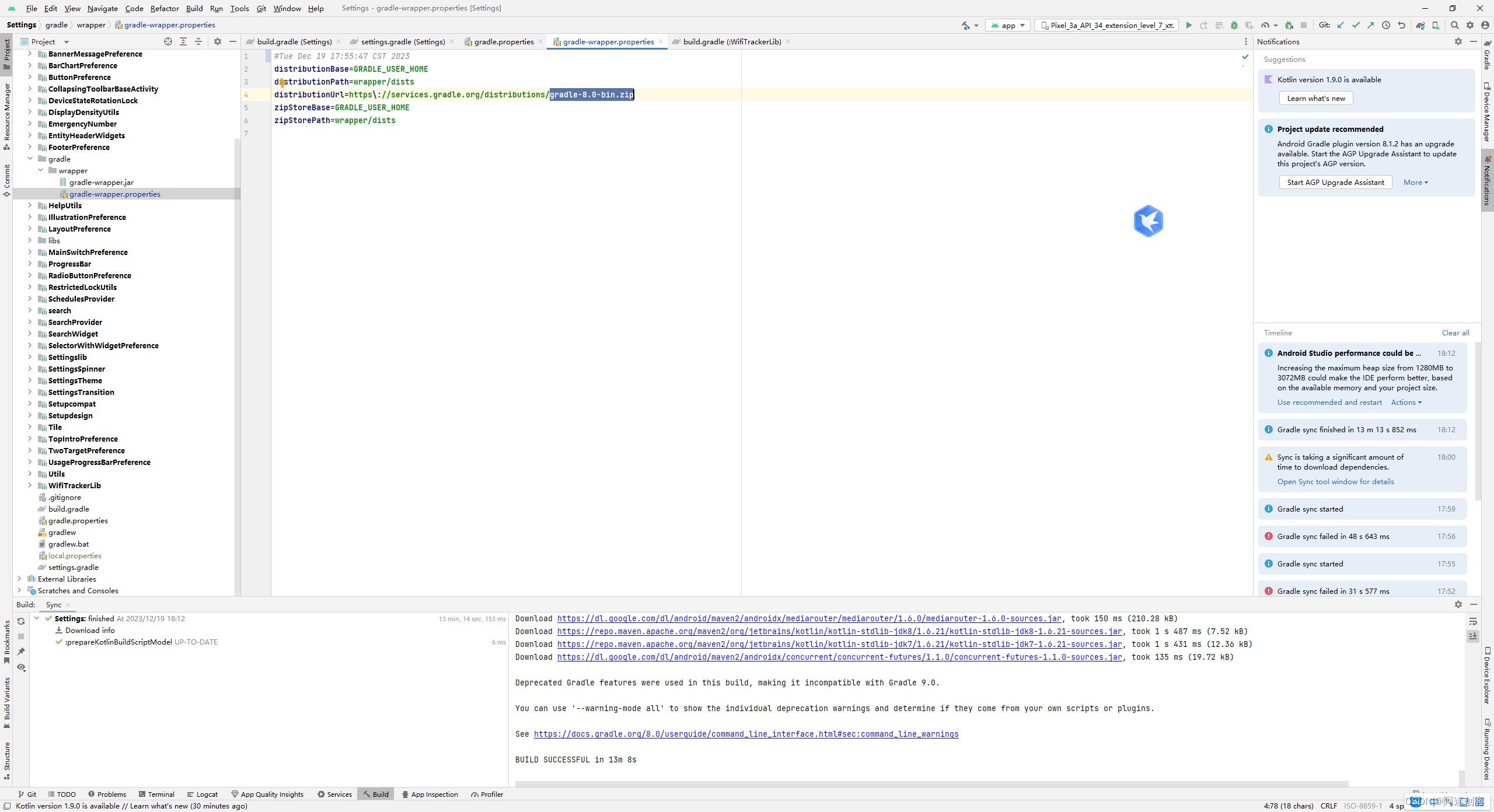
Android Studio: 解决Gradle sync failed 错误
文章目录 1. 前言2. 错误情况3. 解决办法3.1 获取gradle下载地址3.2 获取gradle存放目录3.3 替换并删除临时文件3.4 触发Try Again 4. 执行成功 1. 前言 今天调试项目,发现新装的AS,在下载gradle的过程中,一直显示连接失败,Gradl…...

【手写数据库】从零开始手写数据库内核,行列混合存储模型,学习大纲成型了
目录 专栏内容: 参天引擎内核架构 本专栏一起来聊聊参天引擎内核架构,以及如何实现多机的数据库节点的多读多写,与传统主备,MPP的区别,技术难点的分析,数据元数据同步,多主节点的情况下对故障容灾的支持。 手写数据库toadb 本专栏主要介绍如何从零开发,开发的步骤,以…...
机器学习中的一些经典理论定理
PAC学习理论 当使用机器学习方法来解决某个特定问题时,通常靠经验或者多次试验来选择合适的模型、训练样本数量以及学习算法收敛的速度等。但是经验判断或多次试验往往成本比较高,也不太可靠,因此希望有一套理论能够分析问题难度、计算模型能…...
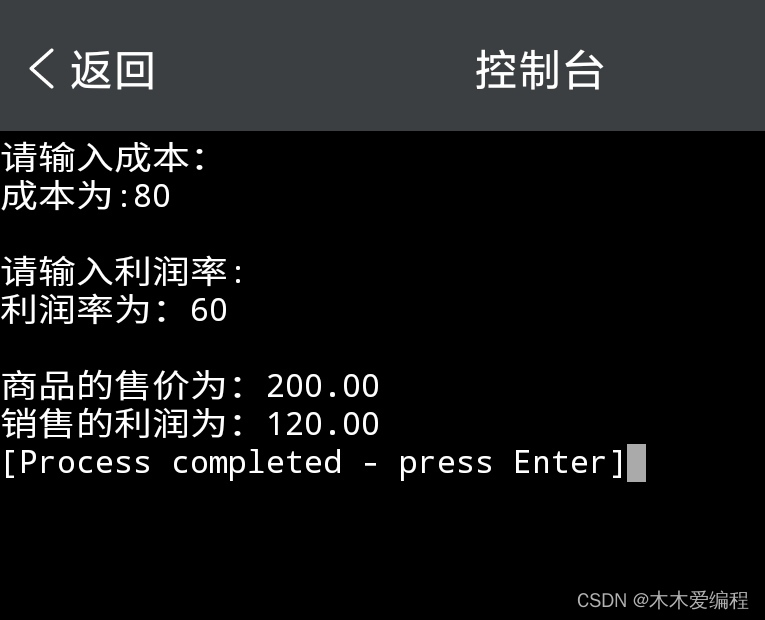
c语言:成本100元,40%的利润怎么计算|练习题
一、利润的计算公式: 利润售价-成本 售价成本/(1-利润率) 二、用c语言代码表示为: 如图: 三、计算源代码【带注释】 #include <stdio.h> int main() { float cost;//成本变量 int prof_rate;//利润率变量 float price;//…...

【Python必做100题】之第二十二题(复制列表)
题目:将一个列表的数据复制到另一个列表中 重点:确保复制到位要导入copy方法进行深度复制 代码如下: #将一个列表的数据复制到另一个列表中 import copy list [1,2,3,4] print(list) list1 copy.copy(list) list[0] 30 print(list) pri…...

Java 数据结构篇-实现堆的核心方法与堆的应用(实现 TOP-K 问题:最小 k 个数)
🔥博客主页: 【小扳_-CSDN博客】 ❤感谢大家点赞👍收藏⭐评论✍ 文章目录 1.0 堆的说明 2.0 堆的成员变量及其构造方法 3.0 实现堆的核心方法 3.1 实现堆的核心方法 - 获取堆顶元素 peek() 3.2 实现堆的核心方法 - 下潜 down(int i) 3.3 实…...

startUML6.0.1破解方法
startUML6.0.1破解方法 文章目录 startUML6.0.1破解方法1.startUML6.0.1快速破解2.概述3.安装Nodejs4.安装asar5.修改app.asar中的源码6.将修改后的源码重新压缩7.覆盖官方的asar文件8.重启startUML9.参考文档 1.startUML6.0.1快速破解 后绪步骤可以不看,直接下载我…...

Python实现多种图像分割方法:基于阈值分割和基于区域分割
Python实现多种图像分割方法:基于阈值分割和基于区域分割 图像分割是图像分析的第一步,是计算机视觉的基础,但也是图像处理中最困难的问题之一。经典的计算机视觉任务,如目标检测、图像识别等都和图像分割相关,图像分…...

嘉立创PCB打样被加价到170元?手把手教你用STM32H743飞控板案例解决‘拆单嫌疑’
STM32H743飞控板PCB打样避坑指南:如何巧妙应对嘉立创拆单判定 最近不少硬件开发者在使用嘉立创进行STM32H743飞控板PCB打样时,遇到了一个令人头疼的问题——原本33元的4层板打样价格突然飙升到170多元。这种情况往往是由于平台算法误判设计文件存在"…...

CCF和中国科协对NeurIPS更正投稿政策做出回应
点击下方卡片,关注“CVer”公众号AI/CV重磅干货,第一时间送达点击进入—>【顶会/顶刊】投稿交流群添加微信号:CVer2233,小助手拉你进群!扫描下方二维码,加入CVer学术星球!可以获得最新顶会/顶…...
的跨模态融合应用)
Mirage Flow 与卷积神经网络(CNN)的跨模态融合应用
Mirage Flow 与卷积神经网络(CNN)的跨模态融合应用 你有没有想过,让机器不仅能“看见”图片,还能像人一样“理解”并“描述”图片里的故事?比如,给一张复杂的医学影像,它不仅能圈出病灶&#x…...

RK3568交叉编译环境搭建:ARM官方GCC 8.3与Linaro版本到底怎么选?我的踩坑与选择心得
RK3568交叉编译环境搭建:ARM官方GCC 8.3与Linaro版本深度对比与实战选择指南 在嵌入式开发领域,交叉编译环境的搭建往往是项目启动的第一道门槛。对于RK3568这样的高性能ARM处理器,选择合适的交叉编译器不仅关系到开发效率,更直接…...

intv_ai_mk11效果对比:同一Prompt下intv_ai_mk11与Qwen2.5在代码生成任务表现
intv_ai_mk11效果对比:同一Prompt下intv_ai_mk11与Qwen2.5在代码生成任务表现 1. 测试背景与目的 在当今AI技术快速发展的背景下,代码生成已成为大语言模型的重要应用场景之一。本次测试旨在对比intv_ai_mk11与Qwen2.5两款模型在相同Prompt下的代码生成…...

CH340/CH341安卓USB主机模式开发实战
1. CH340/CH341安卓USB主机模式开发入门 很多开发者第一次接触安卓USB主机模式开发时,都会遇到一个典型问题:为什么我的手机连上CH340模块后毫无反应?这通常是因为安卓设备默认工作在从机模式(USB Device Mode),而连接串口设备需要…...

RTX 3090环境下的BEVFusion实战部署:从源码编译到多模态训练调优
1. RTX 3090环境准备与BEVFusion适配 在RTX 3090上部署BEVFusion最大的挑战就是硬件与软件版本的兼容性问题。官方推荐的环境是CUDA 9.2和PyTorch 1.3.1,但这对于RTX 3090来说完全不适用——30系显卡需要CUDA 11才能发挥全部性能。我刚开始尝试直接按照官方文档安装…...
Pixel Couplet Gen部署案例:混合云架构(公有云API+私有云模型)方案
Pixel Couplet Gen部署案例:混合云架构(公有云API私有云模型)方案 1. 项目背景与价值 Pixel Couplet Gen是一款融合传统春节文化与现代像素艺术风格的AI春联生成器。该项目基于ModelScope大模型驱动,通过创新的8-bit像素游戏UI设…...
识别术语表匹配)
Qwen3-ASR-0.6B效果展示:金融客服录音(专业术语+缩略语)识别术语表匹配
Qwen3-ASR-0.6B效果展示:金融客服录音(专业术语缩略语)识别术语表匹配 金融客服电话录音里,客户和坐席的对话常常像在说“天书”。一会儿是“LPR”,一会儿是“T0”,还有各种产品代码和内部术语。把这些录音…...

汽车智能制造如何落地?从“黑灯工厂”看AI赋能的关键路径
一、当工厂学会在黑暗中自行运转偌大的汽车生产车间里,灯光熄灭,只有AGV小车穿梭的微光和机械臂有节奏的运作声。没有工人的手电筒,也没有巡检的脚步,一切生产、检测、调度都在黑灯状态下有条不紊地进行。这并非科幻电影ÿ…...