MATLAB - Gazebo 仿真环境
系列文章目录
前言
机器人系统工具箱(Robotics System Toolbox™)为使用 Gazebo 模拟器可视化的模拟环境提供了一个界面。通过 Gazebo,您可以在真实模拟的物理场景中使用机器人进行测试和实验,并获得高质量的图形。
Gazebo 可在 Linux® 机器或 Linux 虚拟机上运行,并使用插件包与 MATLAB® 和 Simulink® 进行通信。在 Gazebo 中进行仿真时,请注意以下要求和限制。
一、在 Linux 虚拟机上运行 Gazebo 仿真器
从 "Virtual Machine with ROS and Gazebo "中下载并安装虚拟机(VM)。在虚拟机中,所需的 Gazebo 插件位于 /home/user/src/GazeboPlugin 文件夹中。虚拟机包含这些软件,并有这些硬件要求。
虚拟机中包含的软件
- 操作系统 - Ubuntu® Ubuntu 20.04.3 LTS (Focal Fossa)
- 软件包 - CMake 3.16.3、Gazebo 11 和 Gazebo 插件
最低硬件要求
- 处理器(CPU)- 四核 Intel® i5 或同等配置
- 内存(RAM)- 4 GB 或以上
- 图形卡(GPU)- 1 GB 或更大显存的专用 GPU
- 磁盘空间 - 至少 20 GB 可用磁盘空间
1.1 ROS 2 Foxy and Gazebo
本页列出了作为机器人系统工具箱(Robotics System Toolbox™)和 ROS 工具箱(ROS Toolbox™)补充的虚拟机的安装说明。您可以使用 MATLAB® 和 Simulink® 与 Gazebo 机器人模拟器以及外部 ROS(机器人操作系统)和 ROS 2 网络协同工作。Ubuntu® Focal 20.04 虚拟机适用于多种平台(Windows®、Mac 和 Linux®),包含以下内容:
- ROS 2 Foxy 桌面安装
- ROS Noetic 桌面安装
- Gazebo 机器人模拟器 11.0.0
- 模拟 TurtleBot® 3 的 Gazebo 世界示例
支持的平台包括 64 位 Windows、64 位 Linux 和 64 位 Mac OS X。安装说明按主机平台列出。
1.1.1 Windows(64 位)
- 下载并安装 VMware® Player 软件(许可证)(VMware® Player software (license)
 https://www.vmware.com/download/eula/universal_eula.html)。
https://www.vmware.com/download/eula/universal_eula.html)。 - 下载包含虚拟机的存档(archivehttps://ssd.mathworks.com/supportfiles/ros/virtual_machines/v3/ros_noetic_foxy_gazebov11_linux_win_v1.zip)。
- 将存档解压缩到硬盘驱动器上的某个位置。
- 启动 VMware Player。
- 在 VMware Player 中,按打开虚拟机。
- 浏览到 Ubuntu 映像的位置,选择 ros_noetic_foxy_gazebov11.vmx 文件,然后按确定。
- 现在虚拟机已添加到库中。
- 在 VMware Player 中启动虚拟机。
- 如果打开的窗口询问您是否复制或移动了虚拟机,请按我复制了它。
1.1.2 Mac OS X(64 位)
该平台使用 VirtualBox® 运行虚拟机,因为 VMware Player 不适用于 Mac。如果您拥有 VMware Fusion® 的有效许可证,则可以按照 Windows 的安装说明进行安装。
下载并安装 VirtualBox® (VirtualBox®![]() https://download.virtualbox.org/virtualbox/6.1.26/VirtualBox-6.1.26-145957-OSX.dmg)for OS X 主机(许可证)((license)
https://download.virtualbox.org/virtualbox/6.1.26/VirtualBox-6.1.26-145957-OSX.dmg)for OS X 主机(许可证)((license)![]() https://www.gnu.org/licenses/old-licenses/gpl-2.0.html)。
https://www.gnu.org/licenses/old-licenses/gpl-2.0.html)。
将虚拟机(virtual machine![]() https://ssd.mathworks.com/supportfiles/ros/virtual_machines/v3/ros_noetic_foxy_gazebov11_mac_v1.ova)下载到硬盘驱动器上的文件夹。
https://ssd.mathworks.com/supportfiles/ros/virtual_machines/v3/ros_noetic_foxy_gazebov11_mac_v1.ova)下载到硬盘驱动器上的文件夹。
启动 VirtualBox。
在 VirtualBox 中,选择文件菜单中的导入设备条目。
选择刚刚下载的文件,然后按 Next(下一步)。
验证虚拟机设置,然后按导入。导入过程可能需要几分钟。
虚拟机现已添加到库中。
在 VirtualBox 中,启动虚拟机。
根据主机的网络配置,您可能需要调整虚拟机的网络设置。如果首次启动时虚拟机显示找不到网络接口的警告,请按更改网络设置并选择主机的主网络适配器名称。
1.1.3 Linux(64 位)
下载 VMware® Player 软件捆绑包(许可证)。
以管理员权限执行软件包安装程序,安装 VMware Player。
下载包含虚拟机的存档(archive![]() https://ssd.mathworks.com/supportfiles/ros/virtual_machines/v3/ros_noetic_foxy_gazebov11_linux_win_v1.zip)。
https://ssd.mathworks.com/supportfiles/ros/virtual_machines/v3/ros_noetic_foxy_gazebov11_linux_win_v1.zip)。
将存档解压缩到硬盘驱动器上的某个位置。
启动 VMware Player。
在 VMware Player 中,按打开虚拟机。
浏览到 Ubuntu 映像的位置,选择 ros_noetic_foxy_gazebov11.vmx 文件,然后按确定。
现在虚拟机已添加到库中。
在 VMware Player 中启动虚拟机。
如果打开的窗口询问您是否复制或移动了虚拟机,请按我复制了它。
二、局限性
MATLAB
- 不支持代码生成。
- MATLAB 与 Gazebo 模拟器之间的通信是异步的。
Simulink
- 不支持代码生成。
- 不支持快速加速器模式。
相关文章:
MATLAB - Gazebo 仿真环境
系列文章目录 前言 机器人系统工具箱(Robotics System Toolbox™)为使用 Gazebo 模拟器可视化的模拟环境提供了一个界面。通过 Gazebo,您可以在真实模拟的物理场景中使用机器人进行测试和实验,并获得高质量的图形。 Gazebo 可在…...
selenium自动化webdriver下载及安装
1、确认浏览器的版本 在浏览器的地址栏,输入chrome://version/,回车后即可查看到对应版本 2、找到对应的chromedriver版本 2.1 114及之前的版本可以通过点击下载chromedriver,根据版本号(只看大版本)下载对应文件 2.2 116版本通过…...
网络基础介绍
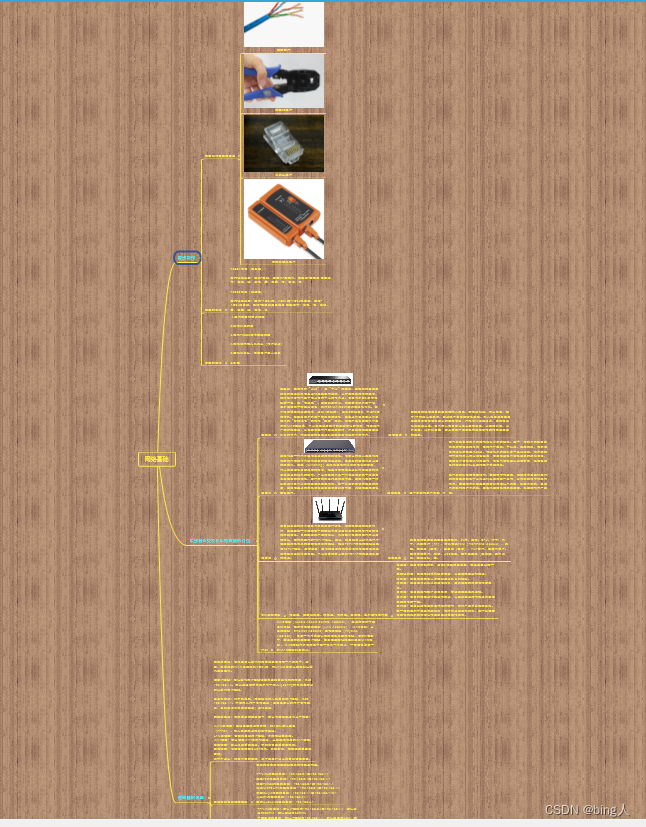
1.网线制作 1.1 网线制作需要的工具 网线 网线钳 水晶头 测试仪 编辑 1.2 网线的标准 1.3 网线的做法 2.集线器&交换机&路由器的介绍 3.OSI七层模型 4.路由器的设置 4.1 常见的路由器设置地址 4.2 常见的路由器账号密码 4.3 登录路由器 设置访客网…...

Java中四种引用类型(强、软、弱、虚)
目录 引言 强引用(Strong References) 软引用(Soft References) 弱引用(Weak References) 虚引用(Phantom References) 引用类型的应用场景 总结 引言 Java中的引用类型是管理…...
【MyBatis学习笔记】MyBatis基础学习
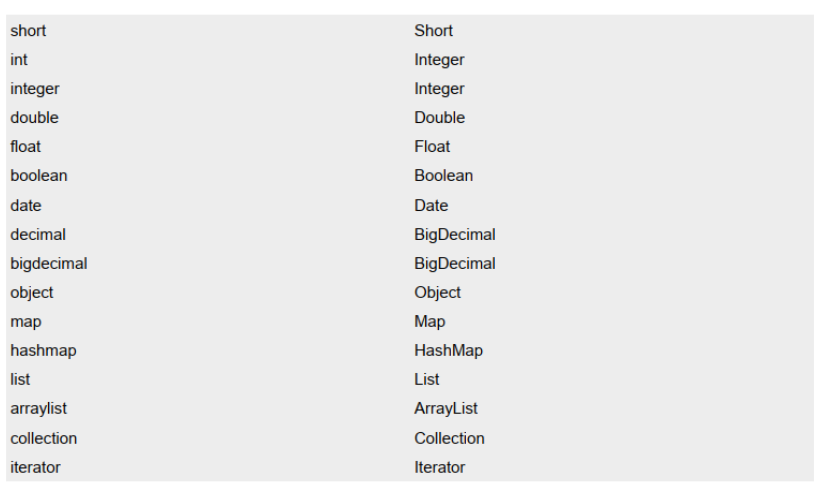
MyBatis基础 MyBatis简介MyBatis特性MyBatis下载和其他持久化层技术对比 核心配置文件详解默认的类型别名 搭建MyBatis开发环境创建maven工程创建MyBatis的核心配置文件创建mapper接口创建MyBatis的映射文件通过junit测试功能加入log4j日志功能 MyBatis获取参数值的两种方式&am…...
还在为论文焦虑?免费AI写作大师帮你搞定
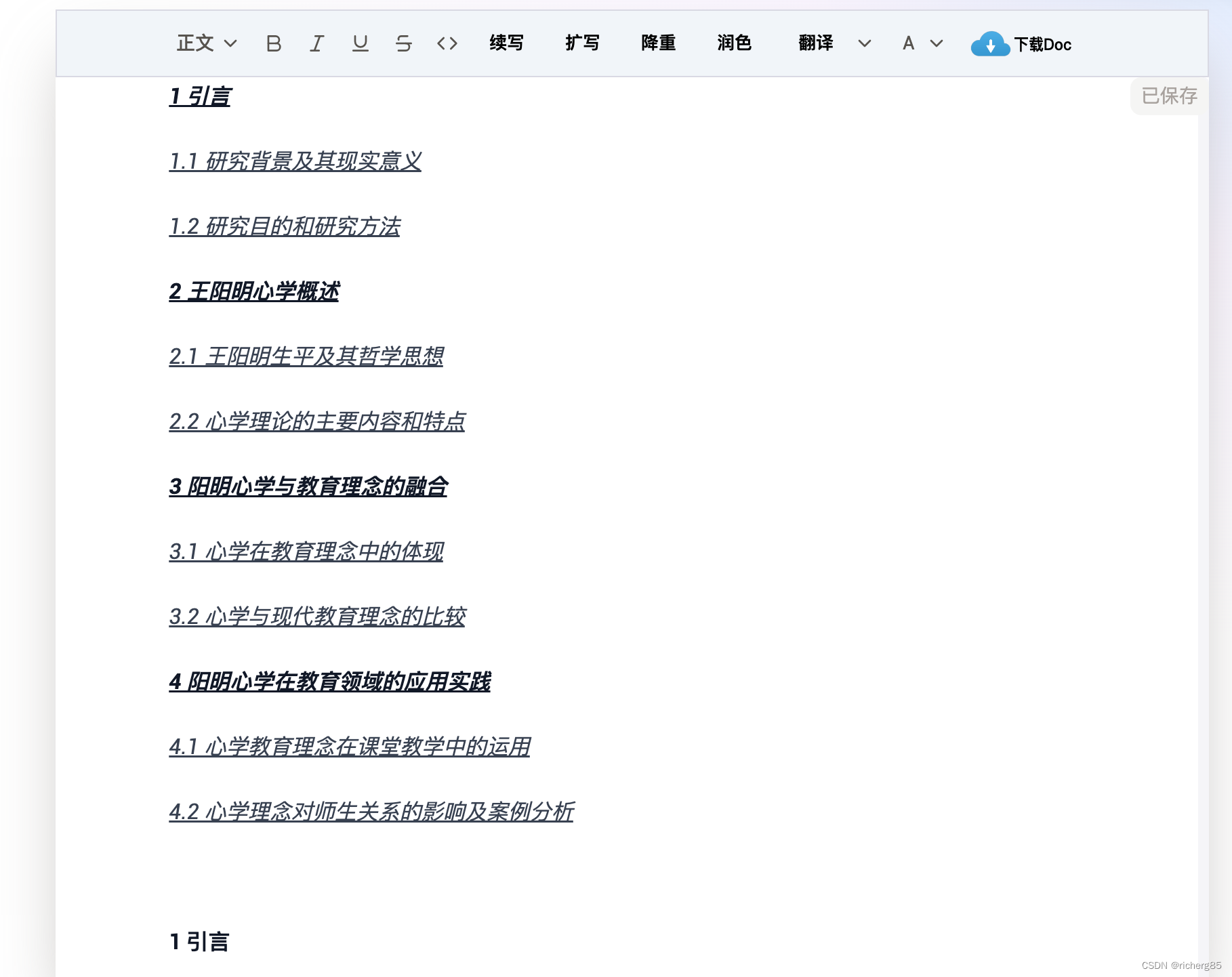
先来看1分钟的视频,对于要写论文的你来说,绝对有所值! 还在为写论文焦虑?免费AI写作大师来帮你三步搞定 第一步:输入关键信息 第二步:生成大纲 稍等片刻后,专业大纲生成(由于举例&am…...
)
3.10【窗口】窗口使用示例(窗口缩放 三)
五,从窗口所有者放大 要从窗口的所有者本身进行放大,可以将源图像矩形设置得比窗口小。可以想象我们在一张图片中选取一部分进行放大的操作。 屏幕使用默认位置 (0,0) 作为源矩形、窗口和显示器显示的左上角。要放大源图形的特定区域,必须设置源矩形的大小。 源矩形由这些…...
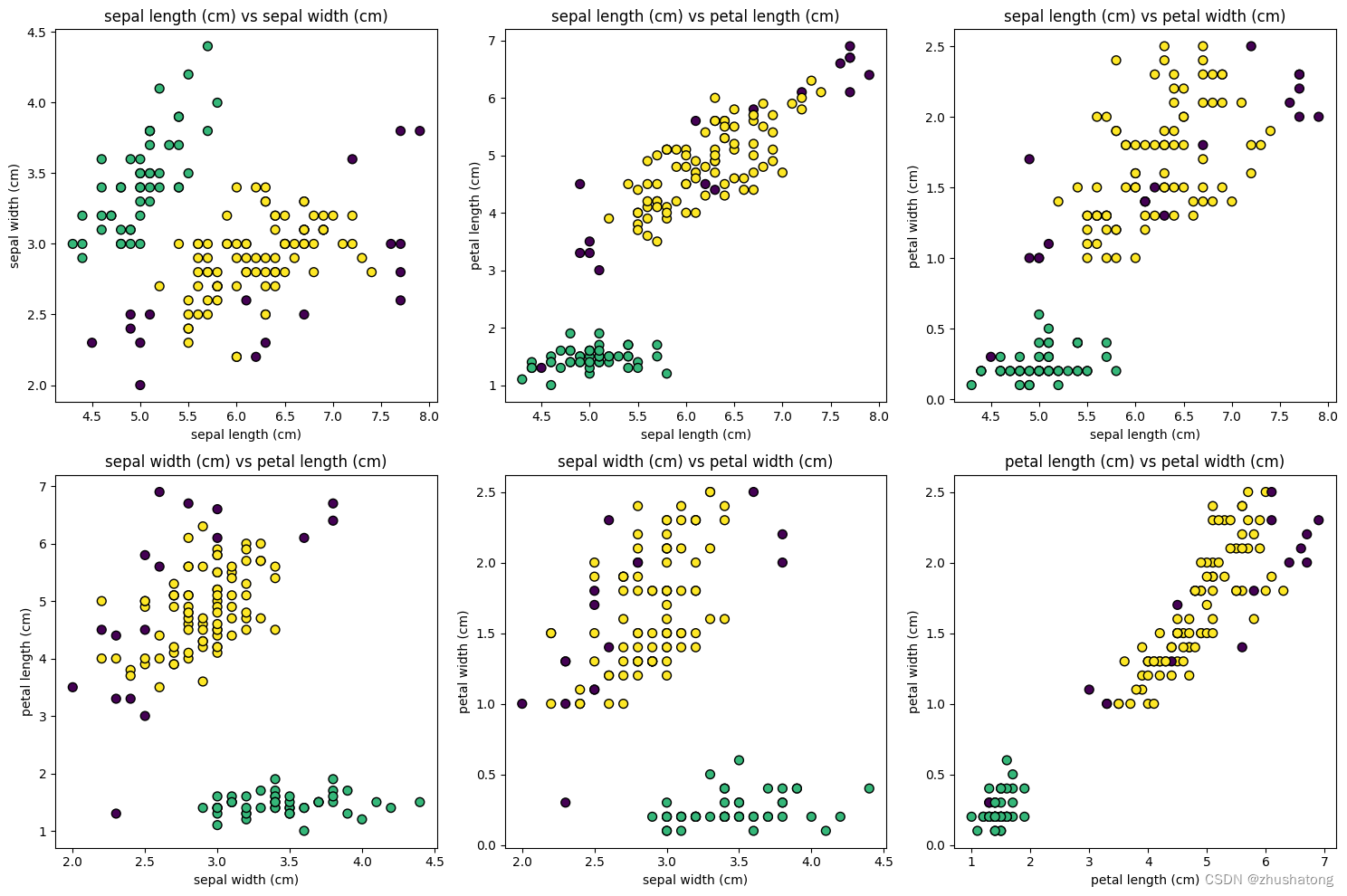
【机器学习】密度聚类:从底层手写实现DBSCAN
【机器学习】Building-DBSCAN-from-Scratch 概念代码数据导入实现DBSCAN使用样例及其可视化 补充资料 概念 DBSCAN(Density-Based Spatial Clustering of Applications with Noise,具有噪声的基于密度的聚类方法)是一种基于密度的空间聚类算…...
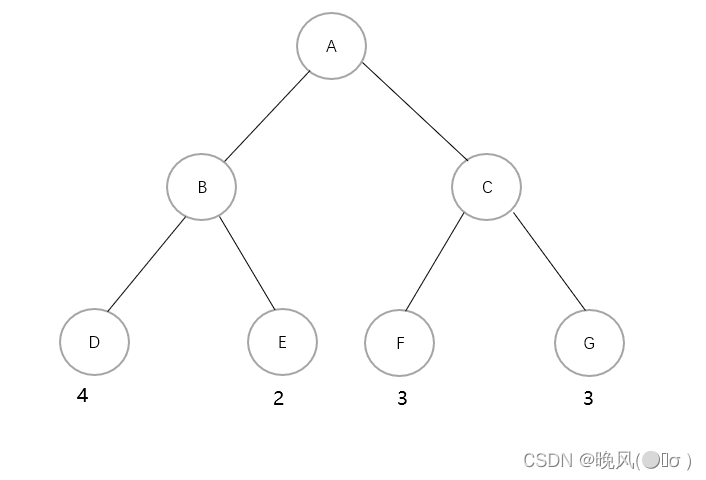
2023-12-20 二叉搜索树的最近公共祖先和二叉搜索树中的插入操作和删除二叉搜索树中的节点
235. 二叉搜索树的最近公共祖先 思想:和二叉树的公共最近祖先节点的思路基本一致的!就是不用从下往上遍历处理!可以利用的二叉搜索树的特点从上往下处理了!而且最近公共节点肯定是第一个出现在【q,p】这个区间的内的&…...
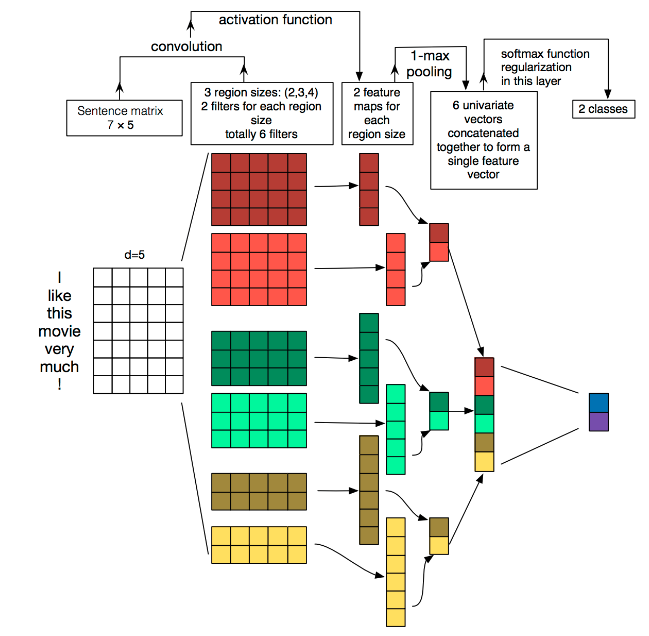
pytorch文本分类(三)模型框架(DNNtextCNN)
pytorch文本分类(三)模型框架(DNN&textCNN) 原任务链接 目录 pytorch文本分类(三)模型框架(DNN&textCNN)1. 背景知识深度学习 2. DNN2.1 从感知器到神经网络2.2 DNN的基本…...
<长篇文章!!>数据结构与算法的重要知识点与概要总结 ( •̀ ω •́ )✧✧临近考试和查漏补缺的小伙伴看这一篇就都懂啦~
目录 一、数据结构概论二、算法概论三、线性表四、栈五、队列六、串七、多维数组与矩阵八、广义表九、树与二叉树十、图 一、数据结构概论 1、数据元素和数据项 数据由数据元素组成,即数据元素是数据的基本单位,而数据元素又由若干个数据项组成…...

【安全】audispd调研
audispd调研 1 问题背景 在Linux中,当某个进程调用audit_set_pid将自己的pid保存到内核的audit模块后,如果有日志生成,kaudit内核线程就会通过netlink通信机制将审计日志发送给audit_pid,因此,只能有一个进程占用aud…...
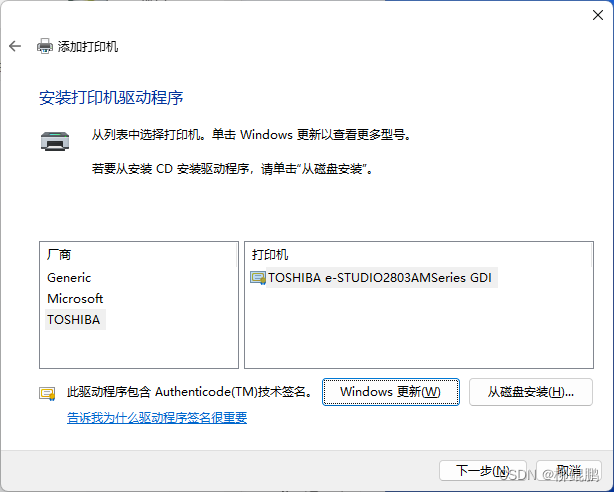
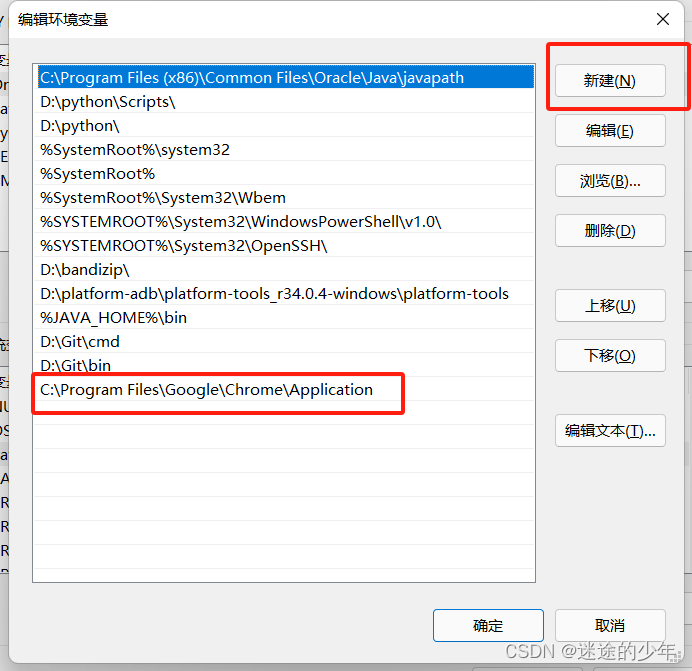
WINDOWS(WIN11)通过IP添加网络打印机
点击添加设备 点击手动添加 使用IP地址或主机名添加打印机 选择TCP/IP设备,输入打印机地址 如果有正确驱动就安装,没有就取消。 通过手动设置添加本地打印机或网络打印机 使用现有的端口 根据打印机IP,选择标准端口。 成功! 到…...

华为数通试题
选择题 华为数通推出的面向企业的云计算平台是? A) FusionSphere B) CloudEngine C) Agile Controller D) eSight 下面哪个不是华为数通的核心交换机系列? A) S12700 B) S5700 C) S9300 D) CloudEngine 华为数通的企业级路由器系列包括哪个?…...

Labview Vision 机器视觉使用,从下载程序安装应用,到实战找硬币并输出值
1.前言 大家好,今天我要和机器人一起配合来打算 做机器视觉 用Labview 和 Vision 联动实现机器的视觉 2.下载软件-软件的安装 我们除了基础款的labview软件 还要安装视觉四件套 1.Labview 编程平台(我是 2023 q3) 2. NI - IMAQdx (驱动软…...

【delphi11】delphi基础探索【三、基础组件和事件】
目录 基础组件 1. TButton(按钮) 2. TLabel(标签) 3. TEdit(编辑框) 4. TMemo(多行编辑框) 5. TComboBox(组合框) 6. TCheckBox(复选框&…...

react hooks浅谈
一.useEffect useEffect是hooks中的生命周期函数 1.只要页面更新就触发回调: useEffect(() > { // 执行逻辑 }) 2.只运行一次(组件挂载和卸载时执行),第二个参数传空数组[]: useEffect(() > { // },[]) 3. 条件…...

stable diffusion webui之lora调用
1.触发词底模lora效果最好(分数不一定要取到1,0.8也行); 2.引用时一定要使用<lora:>,例如<lora:C4D_geometry_bg_v2.5:0.8>; "prompt": "(masterpiece:1.3), (best quality:1.…...
FormData文件上传多文件上传
一、简介 通常情况下,前端在使用post请求提交数据的时候,请求都是采用application/json 或 application/x-www-form-urlencoded编码类型,分别是借助JSON字符串来传递参数或者keyvalue格式字符串(多参数通过&进行连接&#…...
)
八股文打卡day4——计算机网络(4)
TCP和UDP的概念、特点、区别和对应的使用场景? 我的回答: 概念: TCP是传输控制协议,是面向连接、可靠的、基于字节流的传输层通信协议。 UDP是用户数据报协议,是无连接、不可靠的,基于数据报的传输层通信…...

clawhealth:本地化Garmin健康数据同步与自动化分析工具实践
1. 项目概述:打造你的本地健康数据中心如果你和我一样,手腕上常年戴着一块Garmin手表,每天看着它记录步数、心率、睡眠,但总觉得这些数据只是躺在Garmin Connect的云端,自己没法真正“拥有”和分析,那么cla…...

2026 AI大模型API加速网站推荐
在AI开发领域,一个现实问题始终困扰着开发者:如何接入模型厂商的官方API?在海外,注册、绑卡、调用这三个步骤就能轻松解决。然而,国内开发者面临着跨境网络波动、外币支付门槛、发票合规需求以及多厂商Key碎片化管理等…...

Namespace 为什么不够用了:容器逃逸的技术原理与真实攻击链
Namespace 为什么不够用了:容器逃逸的技术原理与真实攻击链 一、共享内核的致命假设 Docker 容器的核心隔离机制是 Linux Namespace cgroups。Namespace 让进程误以为自己独占 PID、网络和文件系统,cgroups 限制 CPU、内存、IO 的使用上限。这套机制将部…...

从找石油到防灾害:地震勘探技术如何跨界守护城市安全?
地震勘探技术的跨界革命:从油气勘探到城市安全守护者 上世纪20年代,当第一批地球物理学家尝试用炸药激发地震波来寻找石油时,他们或许不会想到,这项技术会在百年后成为保护现代城市安全的"透视眼"。传统的地震勘探技术…...
)
告别手动重命名!Win10下用记事本写个.bat脚本,5分钟搞定图片批量编号(001.jpg到999.jpg)
零基础玩转Windows批量重命名:用记事本5分钟打造专属文件编号神器 每次旅行归来或项目结束,手机相册里堆积如山的照片总让人头疼——"IMG_20230401_123456.jpg"这类毫无规律的命名,既难查找又难管理。专业摄影师和自媒体博主们早就…...

FanControl终极指南:5步解决Windows风扇噪音与过热难题
FanControl终极指南:5步解决Windows风扇噪音与过热难题 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trending/f…...

科技与科学领域每日新闻摘要-2026-05-12
科技与科学领域每日新闻摘要 日期: 2026年5月12日 1. Nature发布2026年最值得关注的七大技术 核心要点: 《自然》杂志发表2026年最值得关注的七项关键技术,包括异种器官移植、AI天气预报、可控核聚变、光学显微脑图谱、mRNA疗法、高精度天文成像和量子计算。这些技…...

S905M芯片盒子救砖实战:8189ETV无线与NAND存储的线刷固件修复指南
1. 救砖前的准备工作 当你发现手里的辽宁移动数码视讯Q5盒子突然变砖,先别急着扔。这种采用S905M芯片的盒子其实有很高的可玩性,尤其是搭配8189ETV无线模块和NAND存储的方案,只要掌握正确方法,救砖成功率很高。我前前后后折腾过二…...

超越官方Demo:如何用COCO预训练权重快速微调Mask R-CNN处理你的自定义数据
超越官方Demo:如何用COCO预训练权重快速微调Mask R-CNN处理你的自定义数据 当你在工业质检、医疗影像分析或遥感图像处理中遇到需要精确目标分割的场景时,从头训练一个Mask R-CNN模型无疑是奢侈的。COCO数据集预训练权重就像一位经验丰富的"视觉专家…...

暗黑2存档编辑器:免费开源工具助你轻松修改角色与装备
暗黑2存档编辑器:免费开源工具助你轻松修改角色与装备 【免费下载链接】d2s-editor 项目地址: https://gitcode.com/gh_mirrors/d2/d2s-editor 暗黑2存档编辑器是一款专门为《暗黑破坏神2》玩家设计的免费开源工具,让你能够轻松修改游戏存档&…...