自动驾驶感知——毫米波雷达
文章目录
- 1. 雷达的基本概念
- 1.1 毫米波雷达分类
- 1.2 信息的传输
- 1.3 毫米波雷达的信号频段
- 1.4 毫米波雷达工作原理
- 1.4.1 毫米波雷达测速测距的数学原理
- 1.4.2 毫米波雷达测角度的数学原理
- 1.4.3 硬件接口
- 1.4.4 关键零部件
- 1.4.5 数据的协议与格式
- 1.5 车载毫米波雷达的重要参数
- 1.6 车载毫米波雷达的三种典型应用
- 2. FMCW雷达的工作流程
- 2.1 线性调频脉冲信号
- 2.2 混频器
- 2.3 单目标距离估计
- 2.4 多目标距离估计
- 2.5 单目标速度估计
- 2.6 多目标速度估计
- 参考文献
- 声明
1. 雷达的基本概念
无线电探测及测距(Radio Detection and Ranging), 发射电磁波并接收目标反射的回波信号,通过对比发射信号与回收信号,获取目标的位置、速度等信息。
1.1 毫米波雷达分类
雷达的分类
• 所发射电磁波的频段,决定了雷达的基本性能特点
• 超视距雷达、微波雷达、毫米波雷达、激光雷达、…

- 按照用途分类:军用,气象,导航,车载
- 按照波长分类:米,分米,厘米,毫米
- 按照波形分类:脉冲,连续波
按照波长和用途分类
- 长波雷达(米,分米),分辨率低,穿透性强
➢一般用于广播,军事预警,卫星通讯等: - 短波雷达(厘米,毫米),分辨率高,穿透性差
➢一般用于测绘,短程通讯,车载应用等
按照波形分类
- 脉冲雷达
➢通过脉冲发送和接收的时间差来确定目标的距离
➢不能确定目标的速度 - 连续波雷达
➢发射信号在时间上是连续的
➢发射信号的频率是随着时间变化的(调频连续波)
1.2 信息的传输
◼ 调制:将调制信号(待传输信息)混合到载波信号(起到载运作
用的信号)的过程,可分为调频,调幅,调相。
◼ 解调:相反的过程,即从混合信号中恢复出待传输信息。
◼ 带宽:调制信号频谱的宽度,带宽高有利于传输更多数据。

- 毫米波雷达使用的电磁波波长介于1-10mm,波长短、频段宽,比较 容易实现窄波束,雷达分辨率高,不易受干扰
- 早期被应用于军事领域,随着雷达技术的发展与进步,毫米波雷达传 感器开始应用于汽车电子、无人机、智能交通等多个领域。

1.3 毫米波雷达的信号频段
| 频率 | 24GHz | 77GHz |
|---|---|---|
| 探测范围 | 探测距离短,探测角度(FOV)大 | 探测距离长,探测角度小 |
| 频段限制 | 24GHz频段因与其他无线电设备共享,必须限制发射功率 | 独占频段 |
| 带宽 | 小于1GHz | 可达4GHz |
| 优势 | 在中短距测距有明显优势;探测范围FOV更大 | 波长更短波束更窄;识别精度高且穿透力更强;带宽更大可兼顾远中近不同场景 |
| 代表产品 | 大陆 ARS208,Hella 24GHz角雷达 | 大陆 ARS408,BOSCH LRR4 |
1.4 毫米波雷达工作原理
在车载毫米波雷达中,目前主要有三种调制方案:调频连续波(Frequency
Modulated Continuous Wave, FMCW),频移键控(Frequency Shift Keying, FSK)以及相移键控(Phase Shift Keying, PSK)。
主流车载毫米波雷达所采用的的调制信号为调频连续波FMCW。
其基本原理是在发射端发射一个频率随时间变化的信号,经目标反射后被接收机接收,通过反射信号和接收信号之间的混频,得出两个信号的频率差,随后通过电磁波传播公式和多普勒效应公式求出目标距离和速度.
⚫ 测距测速是通过分析发射和接收的调频连续之间的区别来实现
⚫ 测量角度是通过计算不同天线单元之间的延时差来计算
1.4.1 毫米波雷达测速测距的数学原理

这里首先分析 0<t<T/20<t<T/20<t<T/2 时收发信号的关系。在调频连续波雷达中,本振信号的频率在半个周期内是随时间成线性关系变化的,即fLO(t)=f0+kt(0<t<T2){f_{LO}}(t) = {f_0} + kt{\rm{ }}(0 < t < \frac{T}{2})fLO(t)=f0+kt(0<t<2T) 其中 f0f_0f0 是初始时刻的频率,kkk 是频率随时间变化的斜率。因为频率是相位关于时间 ttt 的导数,因此相位可以表示为频率关于时间 ttt 的积分,即ϕ(t)=2π∫f(t)dt=πkt2+2πf0t+ϕ0\phi (t) = 2\pi \int {f(t)dt = \pi k{t^2} + 2\pi {f_0}t + {\phi _0}} ϕ(t)=2π∫f(t)dt=πkt2+2πf0t+ϕ0 其中 ϕ0\phi _0ϕ0 是初始相位,因此本振信号关于时间的表达式可以写成VLO(t)=V1cos(πkt2+2πf0t+ϕ0){V_{LO}}(t) = {V_1}\cos (\pi k{t^2} + 2\pi {f_0}t + {\phi _0})VLO(t)=V1cos(πkt2+2πf0t+ϕ0) 其中 V1V_1V1 是本振信号的幅度,由于该本振信号的频率是随时间呈连续周期性变化的,所以称之为调频连续波,本振信号经过功率放大器(Power Amplifier, PA)放大后,由天线发射到自由空间中,这里把 PA 和天线的总增益记为 G1G_1G1,则发射信号为VTX(t)=G1V1cos(πkt2+2πf0t+ϕ0){V_{TX}}(t) = {G_1}{V_1}\cos (\pi k{t^2} + 2\pi {f_0}t + {\phi _0})VTX(t)=G1V1cos(πkt2+2πf0t+ϕ0) 该信号经过空气传播到目标表面,被目标反射,最后由接收机接收,信号往返的传播时间为 τττ,若雷达和目标的距离为r(t)r(t)r(t),则τ=2r(t)c=2(r0+vt)c\tau = \frac{{2r(t)}}{c} = \frac{{2({r_0} + vt)}}{c}τ=c2r(t)=c2(r0+vt) 其中 ccc 为电磁波在空气中的传播速度,r0r_0r0 是初始距离,vvv 为雷达和目标间的相对速度。
电磁波在空气中传播和被目标反射的过程也会带来一定损耗,损耗系数记作 α1α_1α1,则接收信号可以表示为VRX(t)=α1G1V1cos(πk(t−τ)2+2πf0(t−τ)+ϕ0){V_{RX}}(t) = {\alpha _1}{G_1}{V_1}\cos (\pi k{(t - \tau )^2} + 2\pi {f_0}(t - \tau ) + {\phi _0})VRX(t)=α1G1V1cos(πk(t−τ)2+2πf0(t−τ)+ϕ0) 这里再介绍以下混频的概念:
混频:输出信号频率等于两输入信号频率之和、差或其他组合的电路。
常用方法:cosα⋅cosβ=[cos(α+β)+cos(α−β)]/2\cos \alpha \cdot \cos \beta = [\cos (\alpha + \beta ) + \cos (\alpha - \beta )]/2cosα⋅cosβ=[cos(α+β)+cos(α−β)]/2
接收信号经过低噪声放大器(Low Noise Amplifier, LNA)放大后,与本振信号进行混频。混频后的信号包含了高频分量和低频分量,将该信号通过一个低通滤波器可得(假设通带内的增益为单位增益):VIF(t)=α1G1G2V12cos(2πkτt+2πf0τ−πkτ2){V_{IF}}(t) = {\alpha _1}{G_1}{G_2}{V_1}^2\cos (2\pi k\tau t + 2\pi {f_0}\tau - \pi k{\tau ^2})VIF(t)=α1G1G2V12cos(2πkτt+2πf0τ−πkτ2) 求导,即可求出中频频率(混频后的信号经低通滤波后所得低频分量,又叫中频频率 f𝐼𝐹f_{𝐼𝐹}fIF(intermediate frequency)为,是RX与TX之差。)fIF(t)≈2kr0c+2f0vc{f_{IF}}(t) \approx \frac{{2k{r_0}}}{c} + \frac{{2{f_0}v}}{c}fIF(t)≈c2kr0+c2f0v 只知道上式是无法求出速度和距离的,所以需要用到三角波的原理进行求解,三角波有两个斜率,一正一负,可以得到两个表达式,进而可以求解出距离rrr和速度vvv。三角波的周期为 TTT,最低频率、最高频率和中心频率分别为 fa、fb、fcf_a、f_b、f_cfa、fb、fc,其带宽 B=fb−faB=f_b-f_aB=fb−fa,三角波的斜率为k=2BT=2(fb−fa)Tk = \frac{{2B}}{T} = \frac{{2({f_b} - {f_a})}}{T}k=T2B=T2(fb−fa) 上升、下降区间的中频频率分别为 𝑓1𝑓_1f1, 𝑓2𝑓_2f2,斜率为kkk, 光速为ccc,变频后的结果如下f1=2krc+2fcvc{f_1} = \frac{{2kr}}{c} + \frac{{2{f_c}v}}{c}f1=c2kr+c2fcvf2=−2krc+2fcvc{f_2} = \frac{{ - 2kr}}{c} + \frac{{2{f_c}v}}{c}f2=c−2kr+c2fcv 因此可以解出速度和距离v=(f1+f2)c4fcv = \frac{{({f_1} + {f_2})c}}{{4{f_c}}}v=4fc(f1+f2)cr=(f1−f2)c4kr = \frac{{({f_1} - {f_2})c}}{{4k}}r=4k(f1−f2)c
只知道上式是无法求出速度和距离的,所以需要用到三角波的原理进行求解,三角波有两个斜率,一正一负,可以得到两个表达式,进而可以求解出距离rrr和速度vvv。三角波的周期为 TTT,最低频率、最高频率和中心频率分别为 fa、fb、fcf_a、f_b、f_cfa、fb、fc,其带宽 B=fb−faB=f_b-f_aB=fb−fa,三角波的斜率为k=2BT=2(fb−fa)Tk = \frac{{2B}}{T} = \frac{{2({f_b} - {f_a})}}{T}k=T2B=T2(fb−fa) 上升、下降区间的中频频率分别为 𝑓1𝑓_1f1, 𝑓2𝑓_2f2,斜率为kkk, 光速为ccc,变频后的结果如下f1=2krc+2fcvc{f_1} = \frac{{2kr}}{c} + \frac{{2{f_c}v}}{c}f1=c2kr+c2fcvf2=−2krc+2fcvc{f_2} = \frac{{ - 2kr}}{c} + \frac{{2{f_c}v}}{c}f2=c−2kr+c2fcv 因此可以解出速度和距离v=(f1+f2)c4fcv = \frac{{({f_1} + {f_2})c}}{{4{f_c}}}v=4fc(f1+f2)cr=(f1−f2)c4kr = \frac{{({f_1} - {f_2})c}}{{4k}}r=4k(f1−f2)c
1.4.2 毫米波雷达测角度的数学原理
一对收发机所采集到的信号是不具备角度信息的, 因此需要采用多路发射多路接收的架构,或者采用相控阵架构。
短波长和小天线孔径就很有必要了,
•短波长意味着波束更窄,能量更加集中;
•更小的孔径尺寸意味着系统上能集成更多的天线单元
这些都有利于提高角分辨率。
1.4.3 硬件接口
⚫ 天线向外发射毫米波,接收目标反射信号
⚫ 信号处理器完成回波信号处理
⚫ 算法芯片完成原始点云目标的进一步处理
⚫ CAN接口完成毫米波处理数据的发送以及配置信息的输入

1.4.4 关键零部件
毫米波雷达的天线接发系统
• PCB板实现MMIC(单片微波集成电路)
• 包括接收电路单元,负责发射与接收连续调频波
毫米波雷达的信号处理芯片
• 包含信号处理器和算法芯片
• 完成回波信号处理与目标感知结果的计算
1.4.5 数据的协议与格式
传输层协议:网口UDP/IP协议,或者CAN接口
- 控制器局域网总线(CAN,Controller Area Network)是一种用 于实时应用的串行通讯协议总线
数据格式:按照CAN编码机制,确定雷达的输入配置信息与输出数据格式
- CAN报文
13个字节 信息段(5Byte)+数据段(8Byte)
数据段按照事先规定好的报文规则进行编码和解码 - CAN报文解析使用方法

数据内容:不同内容使用不同的CAN协议
Cluster类型:包含3类message: - Header(数量n)
- +n个数据消息(距离/角度/速度)
- +n个质量消息(数据的方差)(1≤n ≤ 256)
1.5 车载毫米波雷达的重要参数
常见参数:
-
测量性能 测距范围
距离/水平角/速度 分辨率 (可对两个物体进行区分的最小单位)
距离/水平角/速度 精度 (测量不确定性) -
操作条件 雷达发射功率、传输能力、电源、功耗、操作温度
1.6 车载毫米波雷达的三种典型应用

毫米波雷达具有全天侯适应性,是高级别自动驾驶实现必备的环境感知传感器.
77GHz及79GHz雷达是未来车载毫米波雷达的发展方向,国内正处于快速追赶时期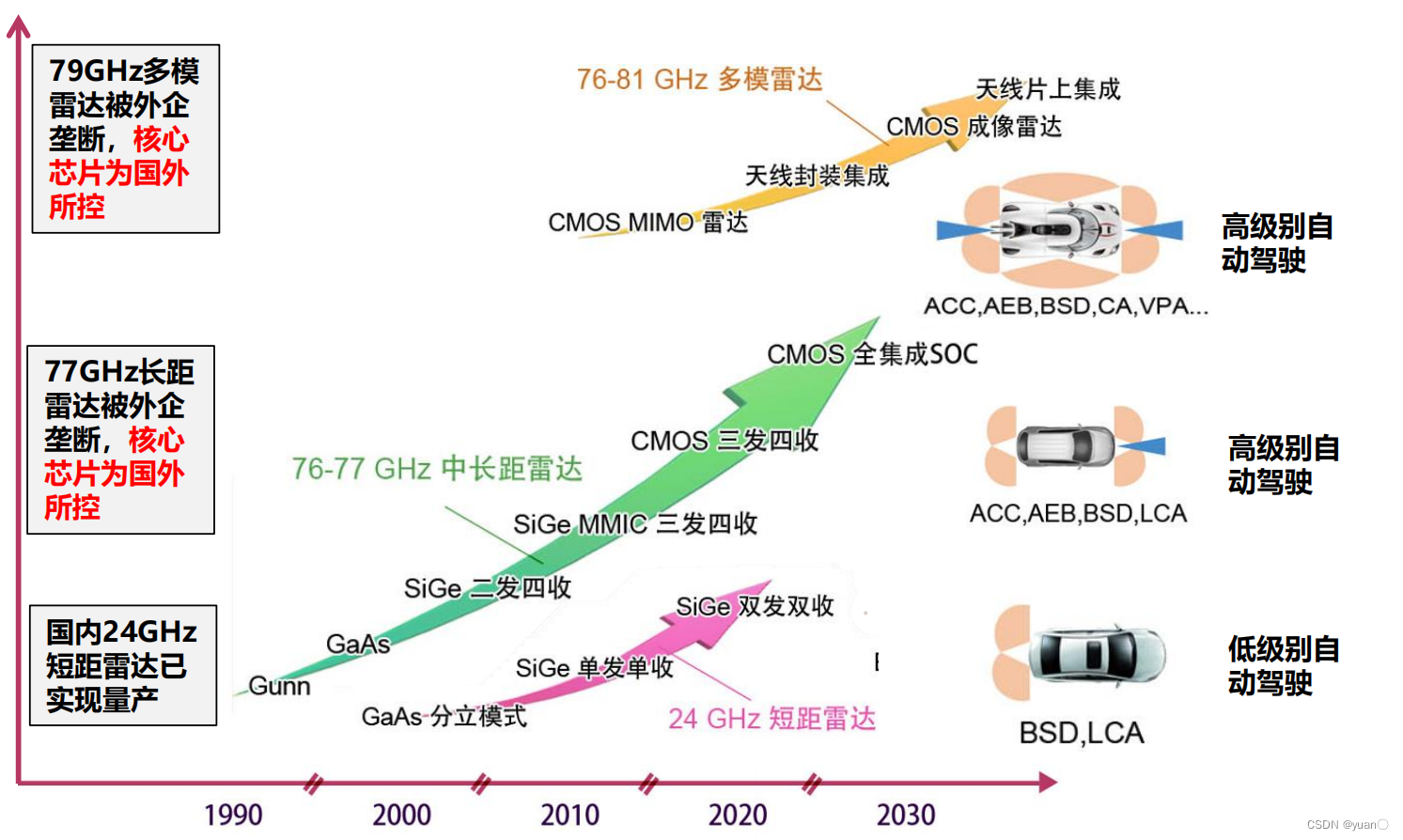
2. FMCW雷达的工作流程
PS:此部分主要是为了简单理解FMCW雷达的工作原理,是对第一章内容的补充。
总结一下,FMCW雷达的工作流程:
- 合成器生成一个线性调频信号 ;
- 发射天线( TX )发射线性调频信号;
- 接收天线( RX )捕获目标对线性调频信号的反射;
- 混频器将RX和TX信号合并到一-起,生成一个中频(IF )信号。

2.1 线性调频脉冲信号
对于一个脉冲信号
- 信号的频率随时间的变化线性升高
- 起始频率fcf_cfc,持续时间TcT_cTc,带宽BBB,频率变化率SSS

2.2 混频器
作用:将TX和RX的信号合并生成一个新的信号IF
TX发射信号:x1=sin(2πf1t+ϕ1){x_1} = \sin (2\pi {f_1}t + {\phi _1})x1=sin(2πf1t+ϕ1)
RX接收信号:x2=sin(2πf2t+ϕ2){x_2} = \sin (2\pi {f_2}t + {\phi _2})x2=sin(2πf2t+ϕ2)
中频信号IF:xout=sin(2π(f1−f2)t+ϕ1−ϕ2)=sin(2πΔft+Δϕ)\begin{array}{c}{x_{out}} = \sin (2\pi ({f_1} - {f_2})t + {\phi _1} - {\phi _2})\\ = \sin (2\pi \Delta ft + \Delta \phi )\end{array}xout=sin(2π(f1−f2)t+ϕ1−ϕ2)=sin(2πΔft+Δϕ)
对于单个静止目标,RX和TX脉冲 之间的时间差是固定为τττ。因此,频率差也是固定的,也就是说IF是一个频率恒定的单音信号。IF的Δf\Delta fΔfΔϕ\Delta \phiΔϕ用以估计速度和距离。
2.3 单目标距离估计
PS:此处估计为了简要分析,雷达与目标的相对速度为0.

RX和TX之间的时间差为τ=2rc\tau = \frac{{2r}}{c}τ=c2r,rrr为距离,ccc为光速。由此可以推出τ=2rc⇒r=Δf⋅c2S\tau = \frac{{2r}}{c} \Rightarrow r = \frac{{\Delta f \cdot c}}{{2S}}τ=c2r⇒r=2SΔf⋅c
从上式可以看出,最大探测距离rrr受限于Δf\Delta fΔf的最大值,Δf\Delta fΔf受限于以下两个因素:
- 带宽BBB:Δf<B\Delta f<BΔf<B,因此r<B⋅c2Sr < \frac{{B \cdot c}}{{2S}}r<2SB⋅c
- IF信号的采样频率FSF_SFS:FS>2ΔfF_S>2\Delta fFS>2Δf
假设一个chirp内的采样频率为NNN,FS=N/TcF_S=N/T_cFS=N/Tc,可得
r<FS⋅c4S=N⋅c4TcS=N⋅c4Br < \frac{{{F_S} \cdot c}}{{4S}} = \frac{{N \cdot c}}{{4{T_c}S}} = \frac{{N \cdot c}}{{4B}}r<4SFS⋅c=4TcSN⋅c=4BN⋅c
最大探测距离主要受限于FsF_sFs,并且与BBB成反比
2.4 多目标距离估计

图片来源
- 来自三个目标的RX接收信号,每个信号有不同的延时,延时和与目标的距离成正比。
- 不同的RX接收信号转化为多个单音信号,每个信号的频率差是恒定的(fb1,fb2,fb3)f_{b1},f_{b2},f_{b3})fb1,fb2,fb3)
- 混频器输出的是多个单音信号的叠加。对该信号进行FFT操作,会产生一个具有不同的峰值的频谱,每个峰值表示在特定距离处的目标。
距离分辨率是指雷达能区分两个不同目标的最小距离。傅里叶变换理论指出:观测时间窗口T,可以分辨间隔超过1/T1/T1/T Hz的频率分量。因此,两个目标反射信号频率差的差值需要满足∣Δf1−Δf2∣>1Tc\left| {\Delta {f_1} - \Delta {f_2}} \right| > \frac{1}{{{T_c}}}∣Δf1−Δf2∣>Tc1根据测距公式:∣Δf1−Δf2∣=2SΔrc\left| {\Delta {f_1} - \Delta {f_2}} \right| = \frac{{2S\Delta r}}{c}∣Δf1−Δf2∣=c2SΔr可以得到最小分辨距离Δr>c2STc=c2B\Delta r > \frac{c}{{2S{T_c}}} = \frac{c}{{2B}}Δr>2STcc=2Bc因此,从式子中我们可以得到提高分辨率的方法:提高带宽BBB,延长chirp信号。
2.5 单目标速度估计
FMCW雷达会发射两个间隔TcT_cTc的线性调频脉冲(两个Chirp) ,相应的IF信号为:
在这里有两个近似条件:
- 在一个chirp时间(Tc=40μs{T_c} = 40\mu sTc=40μs)内,目标的移动距离可以近似看成不变。
- TX与RX的频率基本不变:Δf1≈Δf2\Delta {f_1} \approx \Delta {f_2}Δf1≈Δf2
相位计算公式:Δϕ=2πfτ=2πcτλ=4πrλ\Delta \phi = 2\pi f\tau = \frac{{2\pi c\tau }}{\lambda } = \frac{{4\pi r}}{\lambda }Δϕ=2πfτ=λ2πcτ=λ4πr其中,fff是发射信号频率,τττ是时间延迟,λλλ是发射信号波长,rrr是目标距离。
相位变化为Δϕ1−Δϕ2=4π(r1−r2)λ=4πvTcλ\Delta {\phi _1} - \Delta {\phi _2} = \frac{{4\pi ({r_1} - {r_2})}}{\lambda } = \frac{{4\pi v{T_c}}}{\lambda }Δϕ1−Δϕ2=λ4π(r1−r2)=λ4πvTc用λ=4×10−3,v=10m/s\lambda = 4 \times {10^{ - 3}},v=10m/sλ=4×10−3,v=10m/s估算,得到相位变化为0.4π0.4\pi0.4π,较大。
因此得到速度的估计公式:v=(Δϕ1−Δϕ2)λ4πTcv = \frac{{(\Delta {\phi _1} - \Delta {\phi _2})\lambda }}{{4\pi {T_c}}}v=4πTc(Δϕ1−Δϕ2)λ限制∣Δϕ1−Δϕ2∣<π{\left| {\Delta {\phi _1} - \Delta {\phi _2}} \right| < \pi }∣Δϕ1−Δϕ2∣<π时有效,则得到v<λ4Tcv < \frac{\lambda }{{4{T_c}}}v<4Tcλ

2.6 多目标速度估计
发射一组M个等间隔线性调频脉冲(M个Chirp),

对N这个维度进行FFT处理(距离FFT) ,得到M个频谱。
- 如果目标距离相同,速度不同,M个频谱的峰值相同,但相位不同,包含来自多个目标的相位成分。
- 如果目标距离不同,速度不同,M个频谱都会出现多个峰值,每个峰值的相位都不同。
对M这个维度进行FFT处理(速度FFT) ,可以分离多个相位分量。

速度分辨率:雷达能区分两个不同目标的最小速度差。
傅里叶变换理论指出:两个离散频率ω1\omega_1ω1和ω2\omega_2ω2在满足∇ω=ω1−ω2>2π/M\nabla \omega = {\omega _1} - {\omega _2} > 2\pi /M∇ω=ω1−ω2>2π/M时,是可以分辨的。∇ϕ1−∇ϕ2=4πTcλ(v1−v2)>2π/M\nabla {\phi _1} - \nabla {\phi _2} = \frac{{4\pi {T_c}}}{\lambda }({v_1} - {v_2}) > 2\pi /M∇ϕ1−∇ϕ2=λ4πTc(v1−v2)>2π/M(v1−v2)>λ2TcM=λ2Tf({v_1} - {v_2}) > \frac{\lambda }{{2{T_c}M}} = \frac{\lambda }{{2{T_f}}}(v1−v2)>2TcMλ=2TfλTfT_fTf为一帧的时间
提高速度分辨率的方法:提高帧时间,Chirp时 间固定的话等价于增加Chirp个数。

参考文献
[1] Milovanovic Vladimir M… On fundamental operating principles and range-doppler estimation in monolithic frequency-modulated continuous-wave radar sensors[J]. Facta universitatis - series: Electronics and Energetics,2018,31(4).
声明
本人所有文章仅作为自己的学习记录,若有侵权,联系立删。本系列文章主要参考了清华大学、北京理工大学、哈尔滨工业大学、深蓝学院、百度Apollo等相关课程。
相关文章:
自动驾驶感知——毫米波雷达
文章目录1. 雷达的基本概念1.1 毫米波雷达分类1.2 信息的传输1.3 毫米波雷达的信号频段1.4 毫米波雷达工作原理1.4.1 毫米波雷达测速测距的数学原理1.4.2 毫米波雷达测角度的数学原理1.4.3 硬件接口1.4.4 关键零部件1.4.5 数据的协议与格式1.5 车载毫米波雷达的重要参数1.6 车载…...
取电芯片全协议都可兼容
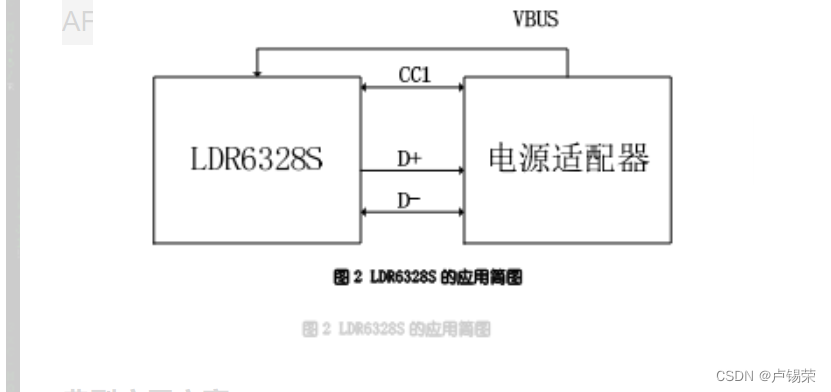
乐得瑞PD协议芯片/PD取电芯片/PD受电端协议芯片 支持5/9/12/15/20v定制 1、概述 LDR6328S 是乐得瑞科技有限公司开发的一款兼容 USB PD、QC 和 AFC 协议的 Sink 控制器。 LDR6328S 从支持 USB PD、QC 和 AFC 协议的适配器取电,然后供电给设备。比如可以配置适配器输…...
自己总结优化代码写法
jdk1.7新特性详解 开发期间略知jdk1.7的一些特性,没有真正的一个一个得展开研究,而是需要说明再去查,导致最整个新特性不是特别的清楚,这种情况以后得需要改变了,否则就会变成代码的奴隶。现在正好有时间可以细细的研…...
Java体系最强干货分享—挑战40天准备Java面试,最快拿到offer!
如何准备java面试,顺利上岸大厂java岗位? 主攻Java的人越来越多,导致行业越来越卷,最开始敲个“hello world”都能进大厂,现在,八股、全家桶、算法等等面试题横行,卷到极致!就拿今年…...

云计算|OpenStack|错误记录和解决方案(不定时更新)
前言: openstack的部署和使用是难度比较大的,难免会出现各种各样的问题,因此,本文将把一些在部署和使用openstack社区版时出现的错误做一个记录,并就每一个错误分析和解决问题。(尽量记录比较经典的错误&a…...
项目实战-NewFixedThreadPool线程池
目录 什么是线程池 线程池的类型 1.CachedThreadPool 2.FixedThreadPool 3.ScheduledThreadPool 4.SingleThreadPool 5.newWorkStealingPool 线程池的好处 1、线程池的重用 2、控制线程池的并发数 3、线程池可以对线程进行管理 线程池的示例 1.Client启动类 2.具体…...
导数与微分总复习——“高等数学”
各位CSDN的uu们你们好呀,今天,小雅兰来复习一下之前学过的知识点,也就是导数与微分的总复习,依旧是高等数学的内容,主要是明天就要考高等数学了,哈哈哈,下面,让我们一起进入高等数学…...

Linux软件安装
1.Linux安装JDK 1.安装位置 /opt 2.安装包 jdk-8u171-linux-x64.rpm 3.安装步骤 1.将安装包上传到虚拟机中 [rootlocalhost opt]# ls jdk-8u171-linux-x64.rpm2.执行安装命令 [rootlocalhost opt]# rpm -ivh jdk-8u171-linux-x64.rpm 准备中... #####…...
【表面缺陷检测】基于YOLOX的PCB表面缺陷检测(全网最详细的YOLOX保姆级教程)
写在前面: 首先感谢兄弟们的订阅,让我有创作的动力,在创作过程我会尽最大能力,保证作品的质量,如果有问题,可以私信我,让我们携手共进,共创辉煌。 Hello,大家好,我是augustqi。 今天给大家分享一个表面缺陷检测项目:基于YOLOX的PCB表面缺陷检测(保姆级教程)。多的…...

【C#基础】C# 程序基础语法解析
序号系列文章0【C#基础】初识编程语言C#1【C#基础】C# 程序通用结构总结 文章目录前言基础语法1. using 关键字2. namespace 关键字3. class 关键字4. 成员字段5. 成员方法6. Main 方法7. new 关键字8. 标识符9. 关键字结语前言 😄 大家好,我是writer桑&…...

【webpack】webpack 中的插件安装与使用
一、webpack 插件的作用 通过安装和配置第三方的插件,可以拓展 webpack 的能力,从而让 webpack 用起来更方便。最常用的 的webpack 插件有如下两个: 1.webpack-dev-server(实时打包构建) 类似于 node.js 阶段用到的 no…...
生物素-磺基-活性酯,Sulfo-NHS Biotin科研用试剂简介;CAS:119616-38-5
生物素-磺基-活性酯,Sulfo-NHS Biotin 结构式: 编辑 添加图片注释,不超过 140 字(可选) 英文名称:Sulfo-NHS-Biotin Sulfosuccinimidyl biotin 中文名称:磺酸基-Biotin-N-琥珀酰亚胺基酯 CAS&…...

Debain安装命令
目录 一、安装sudo命令 二、安装jdk8 三、更换软件源 四、Debian 安装 yum 五、安装zip、unzip、curl、lrzsz、NUMA 六、安装Maven 五、问题 一、安装sudo命令 1)执行sudo命令,提示 -bash: sudo: command not found的解决方法 apt-get install s…...
2023-02-10 - 6 聚合
当用户使用搜索引擎完成搜索后,在展示结果中需要进行进一步的筛选,而筛选的维度需要根据当前的搜索结果进行汇总,这就用到了聚合技术。聚合的需求在很多应用程序中都有所体现,例如在京东App中搜索“咸鸭蛋”,然后单击搜…...

Servlet实现表白墙
目录 一、表白墙简介 二、代码实现 1、约定前后端交互的接口 2、后端代码实现 3、前端代码实现 三、效果演示 一、表白墙简介 在表白墙页面中包含三个文本框,分别表示表白者,表白对象,表白内容,在文本框中输入内容之后&…...

[python入门㊸] - python测试函数
目录 ❤ 测试函数 ❤ 单元测试和测试用例 ❤ 可通过的测试 ❤ 不能通过的测试 ❤ 测试未通过时怎么办 ❤ 添加新测试 ❤ 测试函数 学习测试,得有测试的代码。下面是一个简单的函数: name_function.py def get_formatted_name(first, last):…...

通讯录文件操作化
宝子,你不点个赞吗?不评个论吗?不收个藏吗? 最后的最后,关注我,关注我,关注我,你会看到更多有趣的博客哦!!! 喵喵喵,你对我真的很重…...

为什么 Web3 社交将超越其 Web2 同行
我们最近听到了很多关于 web3 社交媒体平台的消息。但如果你没有跟上,你可能想知道为什么我们已经有了 Twitter、Facebook、Instagram 等,我们还需要 web3 社交。好吧,这一切都取决于谁拥有权力。 在 web2 中,权力掌握在寻求收入最…...
当资深程序员深夜去“打劫”会发生什么?——打家劫舍详解
文章目录一、前言二、概述三、打家劫舍第一晚四、打家劫舍第二晚五、打家劫舍第三晚......一、前言 大家好久不见,正如标题所示,今天我不打算聊一些枯燥的算法理论,我们来聊一聊程序员有多厉害! 注意!!&am…...

linux 线程
文章目录1、线程的概念1.1、进程 vs 线程1.2、线程的种类2、线程的控制2.1、线程的创建2.2、线程的退出2.3、线程的取消2.4、线程的等待2.5、线程的分离2.5、线程清理函数线程清理函数响应的时机线程清理函数不响应的时机3、线程的同步和互斥3.1、锁机制3.1.1、锁的类型3.1.2、…...

5分钟掌握RePKG:Wallpaper Engine资源提取与格式转换的终极秘籍
5分钟掌握RePKG:Wallpaper Engine资源提取与格式转换的终极秘籍 【免费下载链接】repkg Wallpaper engine PKG extractor/TEX to image converter 项目地址: https://gitcode.com/gh_mirrors/re/repkg 你是否曾经面对Wallpaper Engine中的PKG资源包感到无从下…...

阿里从蚂蚁收到股息33亿:AI投入加大致后者年利润153亿 同比降60%
雷递网 乐天 5月13日阿里今日发布财报。财报披露,蚂蚁在2026年第一季度给阿里带来的投资收益为3.75亿(约5500万美元),较上年同期的17.63亿元下降78.7%。截至2026年3月31日,阿里对蚂蚁集团在全面摊薄基础上的股权为33%。…...

四川全行业 APP 开发服务商参考
随着四川各行业数字化进程加快,APP 开发覆盖政务、电商、教育、生活服务、企业管理等多元场景,市场服务商在行业适配、技术能力、服务保障上各有侧重。本文结合多行业落地案例、技术全面性、交付稳定性、运维支持能力,整理全行业适配的 APP 开…...

Thermal Clad金属基板设计与成本优化实战指南
1. 电路设计基础与Thermal Clad特性解析在电子工程领域,电路板设计直接决定了最终产品的性能、可靠性和成本。作为一名有十年硬件设计经验的工程师,我深刻体会到优秀的设计需要在电气性能、热管理和机械强度之间取得平衡。Thermal Clad(热覆金…...

2026届学术党必备的十大AI写作网站解析与推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 针对AI领域当中的那批研究者,以及高校里的老师和学生,还有产业方面的…...

ARM内存访问指令LDRB与LDREX详解及应用
1. ARM内存访问指令概述在嵌入式系统开发中,对内存的高效访问是保证程序性能的关键。ARM架构提供了丰富的内存访问指令集,其中LDRB和LDREX是两种具有代表性的指令。LDRB(Load Register Byte)用于从内存加载字节数据,而…...

README智能生成工具:从项目分析到自动化文档的工程实践
1. 项目概述:一个为README注入灵魂的智能工具在开源社区和日常开发中,README文件的重要性不言而喻。它不仅是项目的门面,更是连接开发者与用户、贡献者之间的第一座桥梁。然而,有多少次,我们面对一个功能强大但文档寥寥…...

透明背景图片制作方法,一个小程序就能搞定!
最近,我被一个问题烦透了——每次需要制作透明背景图片时,总要在各种工具之间折腾半天。直到我发现了一个神器,才彻底改变了我的工作流程。今天,我就来分享一下我用过的所有透明背景图片制作方法,以及为什么我现在最常…...

温室大棚结构设计与选型指南:从荷载计算到智能控制系统
摘要 温室大棚作为现代农业的核心基础设施,其结构设计、材料选型及环境调控系统的合理性直接影响作物产量与运营成本。本文从工程技术角度出发,系统介绍日光温室、智能连栋温室、菌菇专用大棚等常见类型的技术特点、结构参数、荷载计算要点及智能控制系统…...

CC Desktop:基于Claude Code CLI的桌面AI编程工作台深度解析
1. 项目概述:一个为AI编程而生的桌面工作台 如果你和我一样,每天大部分时间都泡在终端里,和Claude Code CLI打交道,那你肯定也经历过这种场景:一边开着终端窗口敲命令,一边还得在浏览器和代码编辑器之间来…...