ubuntu20.04下安装pcl_ubuntu安装pcl
pcl点云数据库,用来进行3D信息的获取与处理,和opencv相比较,opencv是用来处理二维信息,他是学术界与工业界针对点云最全的库,且网络上相关的资料很多。以下是pcl的安装步骤以及遇到的问题。
提前说明,本人用的是ubuntu20.04+pcl1.12.0+vtk7.1.1,使用源码编译的方式,Vtk用来完成点云的可视化。
之前安装过pcl1.12.0+vtk9.1.1,最后pcl安装可视化闪退,所以还是Vtk下载的vtk7.1.1
网络上有说pcl1.8.0+vtk7.1.1是标配,但是在安装pcl1.8.1时出现过错误。
所以本文选择安装 pcl1.12.1 + vtk7.1.1 +qt5.12(在此不做安装说明)
ubuntu18.04_pcl安装
- 1. 首先安装pcl各种依赖
- 2. 安装VTK
- 2.1 首先安装vtk各种依赖:
- 2.2 安装Vtk
- 3. 安装pcl
- 4. pcl测试
1. 首先安装pcl各种依赖
sudo apt-get updatesudo apt-get install git build-essential linux-libc-devsudo apt-get install cmake cmake-guisudo apt-get install libusb-1.0-0-dev libusb-dev libudev-devsudo apt-get install mpi-default-dev openmpi-bin openmpi-commonsudo apt-get install libflann1.9 libflann-dev # ubuntu20.4对应1.9sudo apt-get install libeigen3-devsudo apt-get install libboost-all-devsudo apt-get install libqhull* libgtest-devsudo apt-get install freeglut3-dev pkg-configsudo apt-get install libxmu-dev libxi-devsudo apt-get install mono-completesudo apt-get install libopenni-devsudo apt-get install libopenni2-dev
可能问题:
(1) sudo apt-get install libflann1.9 libflann-dev 显示无法定位包libflann,
首先去查看系统对应的版本 查看地址:Ubuntu – Package Search Results – libflann
搜索libflann 选择ubuntu20.04对应的codename代号:focal :
打开终端,执行以下命令:
lsb_release -a

可以看到ubuntu20.04对应libflan1.9

(2) 安装过程中遇到无法连接的问题,考虑更换源
参考文章:Ubuntu更换软件源_寥廓长空的博客-CSDN博客_ubuntu源
2. 安装VTK
下载地址:Download | VTK
本人下载:VTK-7.1.1.zip
2.1 首先安装vtk各种依赖:
# 首先安装VTK的依赖:X11,OpenGL;cmake和cmake-gui在安装pcl依赖的时候安装过了的话可以跳过# X11sudo apt-get install libx11-dev libxext-dev libxtst-dev libxrender-dev libxmu-dev libxmuu-dev# OpenGLsudo apt-get install build-essential libgl1-mesa-dev libglu1-mesa-dev# cmake && cmake-guisudo apt-get install cmake cmake-gui
2.2 安装Vtk
2.2.1 解压到准备好的安装目录。在目录下新建build文件夹
打开终端输入:
cmake-gui
where is the source code: 路径为VTK目录
where to build the binaries:路径为VTK目录下build的路径
如下图:

点击:configure,显示“Configuring done”。
再勾选“VTK-Group-Qt”,点击“Configure”;完成后,显示“Configuring done”;
最后点击“Generate”;显示“Generating done”,完成。
2.2.2 在build目录下,打开终端输入:
make -j8 # 要是8核处理器还比较着急看结果的话,可以:make -j16sudo make install
3. 安装pcl
下载地址: Release PCL 1.12.0 · PointCloudLibrary/pcl · GitHub
打开pcl目录,新建build文件夹
在build文件中,打开终端,输入:
cmake -DCMAKE_TYPE=None ..make -j8 // 选择8个进程同时处理,如果机子比较差,可以选择make -j4 或者 makesudo make install
到此pcl下载完成,时间会比较长。
4. pcl测试
以下使用两段代码进行测试
4.1 文件构成

cmakelist.txt
cmake_minimum_required(VERSION 2.6)project(pcl_test)find_package(PCL 1.12 REQUIRED)include_directories(${PCL_INCLUDE_DIRS})link_directories(${PCL_LIBRARY_DIRS})add_definitions(${PCL_DEFINITIONS})add_executable(pcl_test pcl_test.cpp)target_link_libraries (pcl_test ${PCL_LIBRARIES})install(TARGETS pcl_test RUNTIME DESTINATION bin)
pcl_test.cpp
#include <iostream>#include <pcl/io/pcd_io.h>#include <pcl/point_types.h>intmain (int argc, char** argv){pcl::PointCloud<pcl::PointXYZ> cloud;// Fill in the cloud datacloud.width = 5;cloud.height = 1;cloud.is_dense = false;cloud.points.resize (cloud.width * cloud.height);for (size_t i = 0; i < cloud.points.size (); ++i){cloud.points[i].x = 1024 * rand () / (RAND_MAX + 1.0f);cloud.points[i].y = 1024 * rand () / (RAND_MAX + 1.0f);cloud.points[i].z = 1024 * rand () / (RAND_MAX + 1.0f);}pcl::io::savePCDFileASCII ("test_pcd.pcd", cloud);std::cerr << "Saved " << cloud.points.size () << " data points to test_pcd.pcd." << std::endl;for (size_t i = 0; i < cloud.points.size (); ++i)std::cerr << " " << cloud.points[i].x << " " << cloud.points[i].y << " " << cloud.points[i].z << std::endl;return (0);}
运行:进入build,打开终端输入:
cmake ..make./pcl_test.cpp
得到结果:

4.2 另一个测试代码为
pcl_test.cpp
#include <iostream>#include <pcl/common/common_headers.h>#include <pcl/io/pcd_io.h>#include <pcl/visualization/pcl_visualizer.h>#include <pcl/visualization/cloud_viewer.h>#include <pcl/console/parse.h>int main(int argc, char **argv) {std::cout << "Test PCL !!!" << std::endl;pcl::PointCloud<pcl::PointXYZRGB>::Ptr point_cloud_ptr (new pcl::PointCloud<pcl::PointXYZRGB>);uint8_t r(255), g(15), b(15);for (float z(-1.0); z <= 1.0; z += 0.05){for (float angle(0.0); angle <= 360.0; angle += 5.0){pcl::PointXYZRGB point;point.x = 0.5 * cosf (pcl::deg2rad(angle));point.y = sinf (pcl::deg2rad(angle));point.z = z;uint32_t rgb = (static_cast<uint32_t>(r) << 16 |static_cast<uint32_t>(g) << 8 | static_cast<uint32_t>(b));point.rgb = *reinterpret_cast<float*>(&rgb);point_cloud_ptr->points.push_back (point);}if (z < 0.0){r -= 12;g += 12;}else{g -= 12;b += 12;}}point_cloud_ptr->width = (int) point_cloud_ptr->points.size ();point_cloud_ptr->height = 1;pcl::visualization::CloudViewer viewer ("test");viewer.showCloud(point_cloud_ptr);while (!viewer.wasStopped()){ };return 0;}
运行结果:
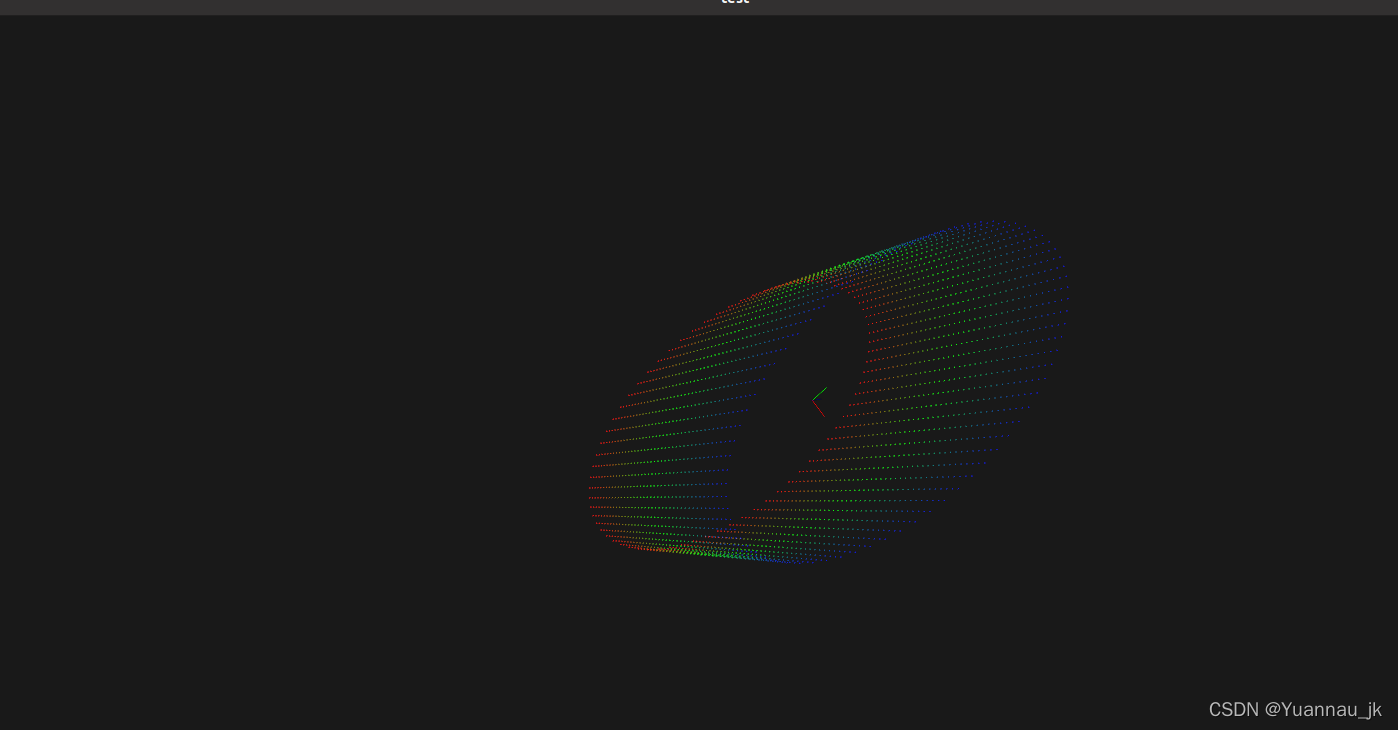
如果以上结果没问题,pcl就安装成功了。
5. cloudcompare软件安装
推荐snap安装方式
sudo apt-get updatesudo apt install snapsudo snap install cloudcompare
cloudcompare.CloudCompareloudcompare.ccViewer
相关文章:
ubuntu20.04下安装pcl_ubuntu安装pcl
pcl点云数据库,用来进行3D信息的获取与处理,和opencv相比较,opencv是用来处理二维信息,他是学术界与工业界针对点云最全的库,且网络上相关的资料很多。以下是pcl的安装步骤以及遇到的问题。 提前说明,本人…...

阿里云常用配置:日志采集、OSS、RAM 权限策略
文章目录 引言I 日志采集1.1 具体查询语法1.2 查询示例1.3 设置token时间(登录过期时间)II OSS2.1 设置防盗链2.2 验证Referer防盗链是否生效III 通义灵码 (智能编码)IV RAM 权限策略4.1 短信策略4.2 内容风险检测引言 SLS I 日志采集...

回顾丨2023 SpeechHome 第三届语音技术研讨会
下面是整体会议的内容回顾: 18日线上直播回顾 18日上午9:30,AISHELL & SpeechHome CEO卜辉宣布研讨会开始,并简要介绍本次研讨会的筹备情况以及报告内容。随后,CCF语音对话与听觉专委会副主任、清华大学教授郑方,…...
【flink】状态清理策略(TTL)
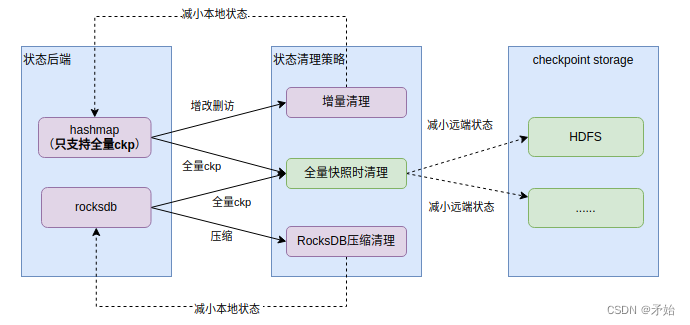
flink的keyed state是有有效期(TTL)的,使用和说明在官网描述的篇幅也比较多,对于三种清理策略没有进行横向对比得很清晰。 全量快照清理(FULL_STATE_SCAN_SNAPSHOT)增量清理(INCREMENTAL_CLEANUP)rocksdb压缩清理(ROCKSDB_COMPACTION_FILTER) 注意&…...
4. 行为模式 - 中介者模式
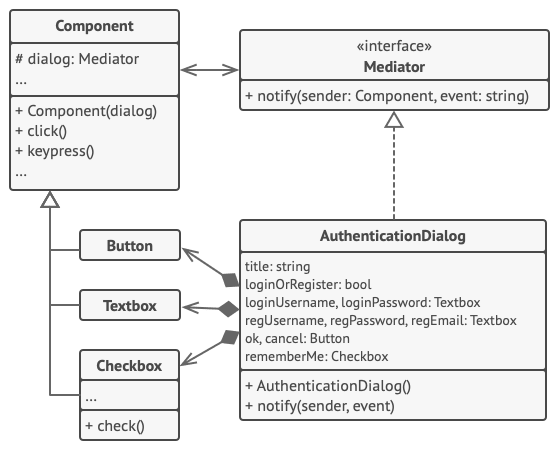
亦称: 调解人、控制器、Intermediary、Controller、Mediator 意图 中介者模式是一种行为设计模式, 能让你减少对象之间混乱无序的依赖关系。 该模式会限制对象之间的直接交互, 迫使它们通过一个中介者对象进行合作。 问题 假如你有一个创建…...
2015年第四届数学建模国际赛小美赛A题飞机上的细长座椅解题全过程文档及程序
2015年第四届数学建模国际赛小美赛 A题 飞机上的细长座椅 原题再现: 航空公司座位是指在旅途中乘客可以乘坐的座位。一些航空公司现在推出了新的经济舱“超薄”座位。这些座椅除了重量较轻外,理论上还允许航空公司在不显著影响乘客舒适度的情况下增加运…...
使用paddlepaddle,再探波士顿房价预测)
机器学习笔记(二)使用paddlepaddle,再探波士顿房价预测
目标 用paddlepaddle来重写之前那个手写的梯度下降方案,简化内容 流程 实际上就做了几个事: 数据准备:将一个批次的数据先转换成nparray格式,再转换成Tensor格式前向计算:将一个批次的样本数据灌入网络中ÿ…...

【Linux】权限篇(二)
权限目录 1. 前言2. 权限2.1 修改权限2.2 有无权限的对比2.3 另外一个修改权限的方法2.3.1 更改用户角色2.3.2 修改文件权限属性 3. 第一个属性列4. 目录权限5. 默认权限 1. 前言 在之前的一篇博客中分享了关于权限的一些知识,这次紧接上次的进行,有需要…...

reduce累加器的应用
有如下json数据,需要统计Status的值为0和1的数量 const data {"code": "001","results": [{"Status": "0",},{"Status": "0",},{"Status": "1",}] }方法一:用reduce方…...

助力硬件测试工程师之EMC项目测试。
1:更新该系列的目的 接下来的一个月内,将更新硬件测试工程师的其中测试项目--EMC项目,后续将会出安规等项目,助力测试工程师的学习。 2:如何高效率的展现项目的基础以及一些细节知识点 通过思维导图以及标准的规定进行…...
Github 2023-12-23 开源项目日报 Top10
根据Github Trendings的统计,今日(2023-12-23统计)共有10个项目上榜。根据开发语言中项目的数量,汇总情况如下: 开发语言项目数量Python项目6C项目2C项目1Jupyter Notebook项目1HTML项目1Go项目1非开发语言项目1 免费API集体清单 创建周期…...

Quartz.net 正则表达式触发器
1、创建项目 项目类型控制台应用程序,.Net Framework框架版本 4.7.2 2、引入框架 NuGet\Install-Package Quartz -Version 3.8.0 3、创建Job 自定义Job实现接口IJob,在Execute方法实现定时逻辑, using Quartz; using System; using Sys…...
【已解决】修改了网站的class样式name值,会影响SEO,搜索引擎抓取网站及排名吗?
问题: 修改了网站的class样式name值,会影响搜索引擎抓取网站及排名吗? 解答: 如果你仅仅修改了网站class样式的名称,而没有改变网站的结构和内容,那么搜索引擎通常不会因此而影响它对网站的抓取和排名。但…...

微信小程序开发系列-02注册小程序
上一篇文章,创建了一个最小的小程序,但是,还有3个疑问没有弄清楚,还是基于demo1工程,这篇文章继续探索。 当前的目录结构是否是完备的呢?(虽然小程序可以运行起来)app.js文件内容还…...
安装 PyCharm 2021.1 保姆级教程
作者:billy 版权声明:著作权归作者所有,商业转载请联系作者获得授权,非商业转载请注明出处 前言 目前能下载到的最新版本是 PyCharm 2021.1。 请注意对应 Python 的版本: Python 2: 2.7Python 3: >3.6, <3.11…...
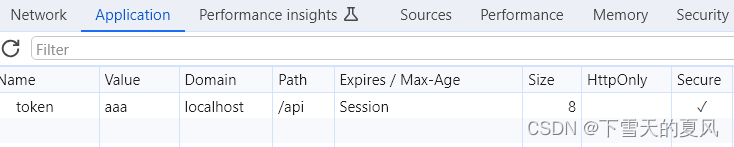
浏览器 cookie 的原理(详)
目录 1,cookie 的出现2,cookie 的组成浏览器自动发送 cookie 的条件 3,设置 cookie3.1,服务端设置3.1,客户端设置3.3,删除 cookie 4,使用流程总结 整理和测试花了很大时间,如果对你有…...

StringBuilder和StringBuffer区别是什么?
想象一下,你在写信,但是你需要不断地添加新的内容或者修改一些词句。在编程中,当你需要这样操作字符串时,就可以用StringBuffer或StringBuilder。 StringBuffer StringBuffer就像是一个多人协作写作的工具。如果你和你的朋友们一…...

【数据分析】数据指标的分类及应用场景
数据分析之数据指标的分类 数据分析离不开对关键指标的分析与跟踪,这些指标通常与具体的业务直接相关。好的指标能够促进业务的健康发展,因为指标与业务目标是一致的,此时指标就能反映业务变化,指标发生变化,行动也发…...
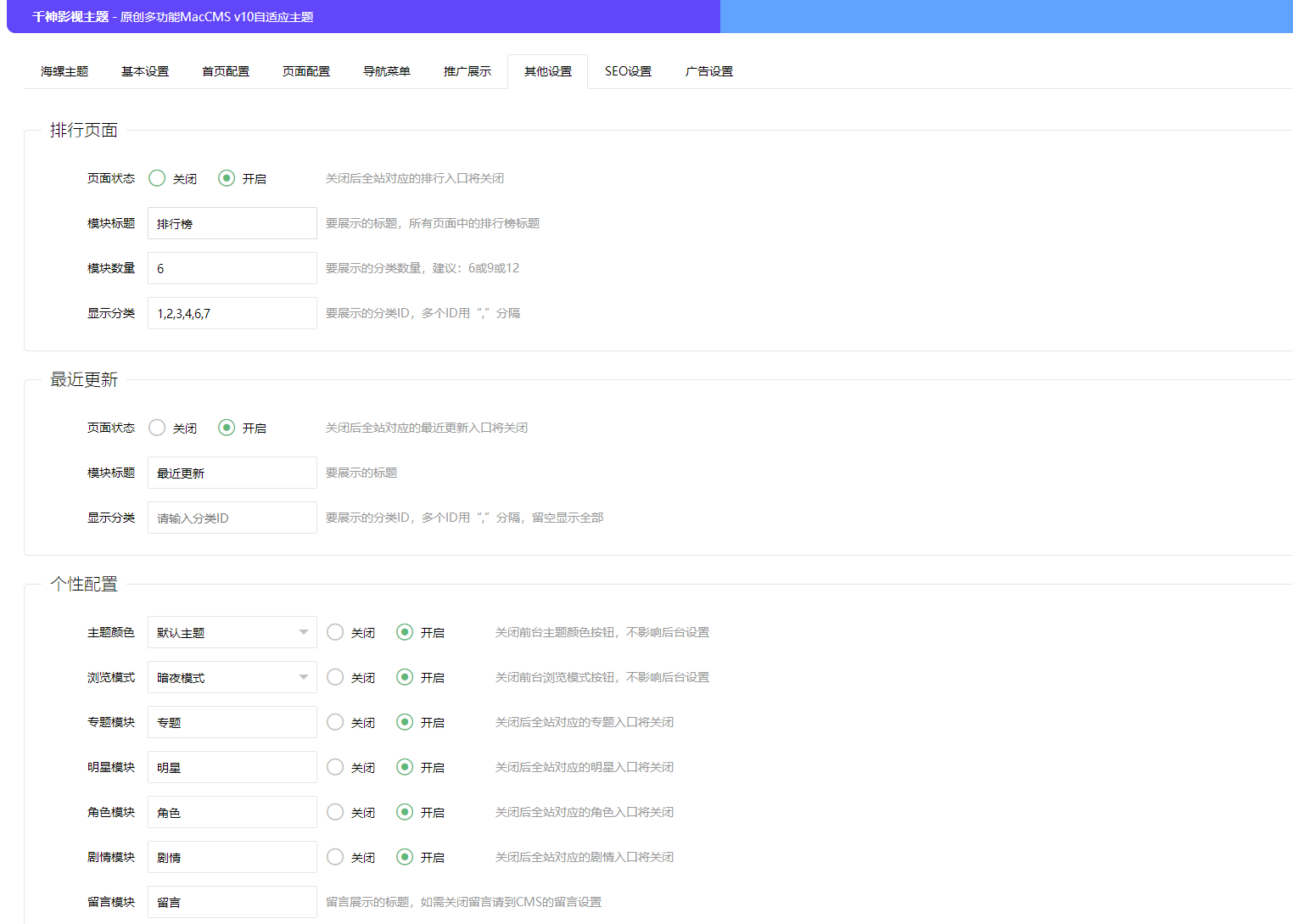
首涂第二十八套_新版海螺M3多功能苹果CMSv10自适应全屏高端模板
首涂第二十八套_新版海螺M3多功能苹果cmsv10自适应全屏高端模板 多功能苹果cmsv10自适应全屏高端模板开源授权版 这是一款带“主题管理系统”的模板。这是一款好模板。 花大价钱收购了海螺这两个模板的版权。官方正品,非盗版。关闭域名授权 后台自定义菜单 请把…...
MatGPT - 访问 OpenAI™ ChatGPT API 的 MATLAB® 应用程序
系列文章目录 前言 MatGPT 是一款 MATLAB 应用程序,可让您轻松访问 OpenAI 的 ChatGPT API。使用该应用程序,您可以加载特定用例的提示列表,并轻松参与对话。如果您是 ChatGPT 和提示工程方面的新手,MatGPT 不失为一个学习的好方…...

AI智能体开发新范式:用TDD工程化方法构建可靠LLM应用
1. 项目概述:当AI智能体遇上测试驱动开发最近在GitHub上看到一个挺有意思的项目,叫agent-skill-tdd。光看名字,就能嗅到一股“新老结合”的味道——一边是当下火热的AI智能体(Agent),另一边是软件工程领域经…...

Vigil与其他监控工具集成:构建全方位监控体系的3种方案
Vigil与其他监控工具集成:构建全方位监控体系的3种方案 【免费下载链接】vigil 🚦 Microservices Status Page. Monitors a distributed infrastructure and sends alerts (Slack, SMS, etc.). 项目地址: https://gitcode.com/gh_mirrors/vig/vigil …...

鲲鹏超节点系统应用创新竞争力
鲲鹏超节点通过灵衢互联,打破传统的服务器边界,实现以数据为中心的全互联架构,为AI infra而生,具备大带宽、低时延、统一编址、内存语义、内存借用、内存共享、对等互联等关键能力,灵衢软件全面开源开放,让…...

录音转文字app免费版有哪些?2026年免费录音转文字app排行榜实测对比
做语音采访、课程记录或会议纪要的时候,经常卡在两个问题上:一是转写完的文字错漏太多得反复修改,二是处理一堆音频文件特别耗时间。微信里有个叫提词匠的小程序在这类需求里效率比较高,下面会重点拆解它,同时对比几个…...

深度学习入门实战:从PyTorch环境搭建到CNN模型调优全指南
1. 项目概述:一个面向初学者的深度学习实战指南 如果你刚刚踏入深度学习的大门,面对PyTorch、TensorFlow这些框架,以及各种复杂的模型代码感到无从下手,那么“datawhalechina/leedl-tutorial”这个开源项目,很可能就是…...

基于树莓派与AstroPrint搭建无线3D打印控制中心实战指南
1. 项目概述:为什么需要无线3D打印控制?如果你和我一样,是个喜欢折腾3D打印机的创客或爱好者,那你肯定经历过这样的场景:为了打印一个模型,需要先在电脑上用切片软件生成G-code文件,然后找到读卡…...

从零搭建CFD-DEM耦合环境:OpenFOAM与PFC3D在WSL2下的实战部署指南
1. 环境准备:WSL2与Ubuntu基础配置 第一次接触CFD-DEM耦合仿真的同学,建议从Windows系统起步。微软的WSL2(Windows Subsystem for Linux)现在已经能完美支持Ubuntu环境,实测比虚拟机流畅得多。我去年在联想小新Pro16上…...
)
给娃规划信奥路?先看懂CSP-J/S初赛分数线背后的“地域密码”(2019-2024年数据解读)
解码CSP-J/S初赛分数线:家长必知的地域竞争策略(2019-2024实战指南) 当孩子第一次接触信息学奥赛时,大多数家长都会面临相似的困惑:为什么同样的分数在A省能轻松晋级,在B省却可能止步初赛?过去…...

BilibiliDown实战指南:3大核心功能深度解析与高效下载方案
BilibiliDown实战指南:3大核心功能深度解析与高效下载方案 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/gh_mirro…...
)
YOLO26驱动的足球比赛多目标检测系统:球员、守门员、裁判与足球的实时识别(项目源码+数据集+模型权重+UI界面+python+深度学习+远程环境部署)
摘要 足球作为全球最受欢迎的体育运动之一,其数字化分析对于战术研究、运动员评估和比赛裁判具有重要意义。本文基于YOLO目标检测算法,构建了一套足球运动员识别检测系统,实现对比赛场景中足球、守门员、球员和裁判四类目标的自动检测与定位…...