ccc-pytorch-小实验合集(4)
文章目录
- 一、 Himmelblau 优化
- 二、多分类实战-Mnist
- 三、Sequential与CPU加速-Mnist
- 四、visidom可视化
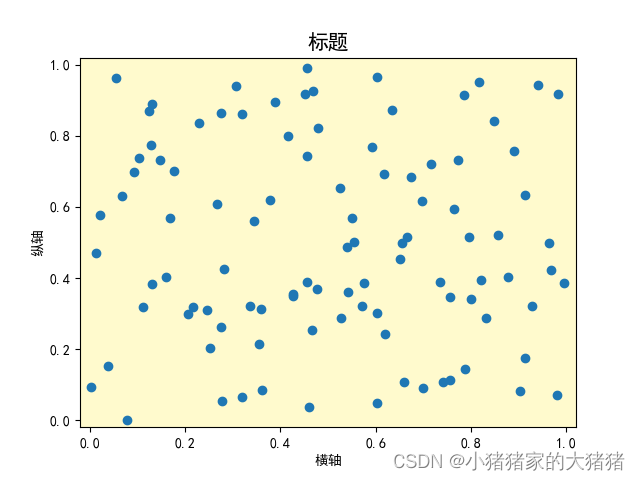
一、 Himmelblau 优化
Himmelblau 是一个具有4个最优值的2维目标函数。其函数和最优值点如下:
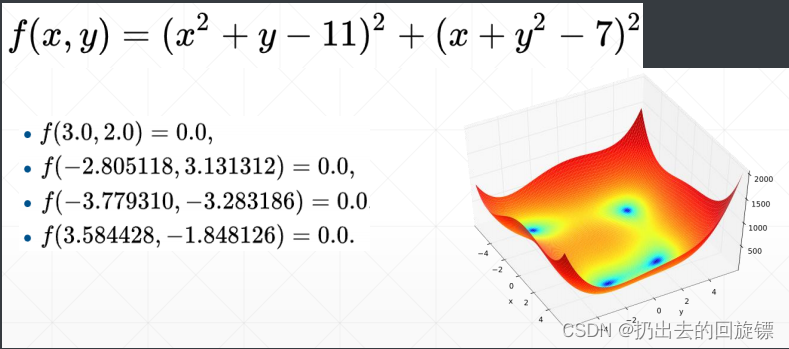
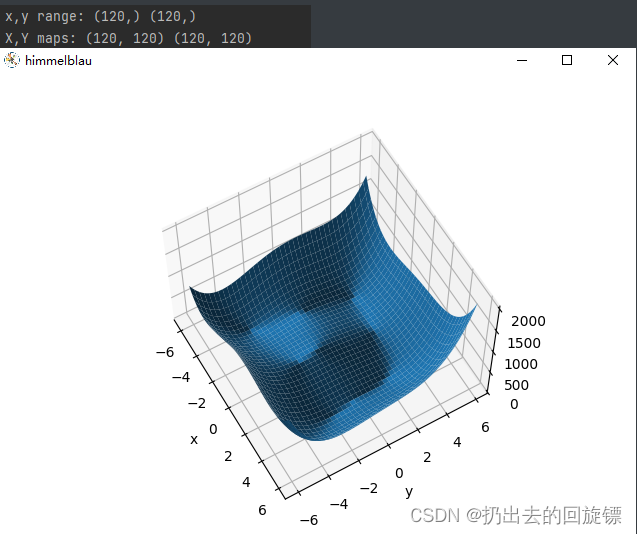
图象绘制:
import numpy as np
from matplotlib import pyplot as pltdef himmelblau(x):return (x[0] ** 2 + x[1] - 11) ** 2 + (x[0] + x[1] ** 2 - 7) ** 2x = np.arange(-6, 6, 0.1)
y = np.arange(-6, 6, 0.1)
print('x,y range:', x.shape, y.shape)
X, Y = np.meshgrid(x, y)
print('X,Y maps:', X.shape, Y.shape)
Z = himmelblau([X, Y])fig = plt.figure('himmelblau')
ax = fig.add_subplot(projection='3d')
ax.plot_surface(X, Y, Z)
ax.view_init(60, -30)
ax.set_xlabel('x')
ax.set_ylabel('y')
plt.show()
Gradient Descent:
# [1., 0.], [-4, 0.], [4, 0.]
x = torch.tensor([-4., 0.], requires_grad=True)
optimizer = torch.optim.Adam([x], lr=1e-3)
for step in range(20000):pred = himmelblau(x)# 清空各参数的梯度optimizer.zero_grad()pred.backward()# 优化器更新参数x'=x-lr*梯度optimizer.step()if step % 2000 == 0:print ('step {}: x = {}, f(x) = {}'.format(step, x.tolist(), pred.item()))
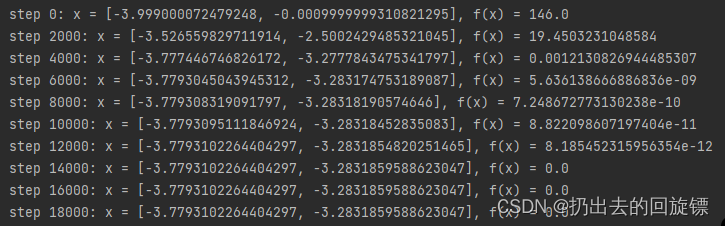
给予x不同的初始化位置可以得到不同的收敛结果和次数。说明初始位置的选择对于收敛的过程和结果非常重要。
二、多分类实战-Mnist
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torchvision import datasets, transformsbatch_size=200
learning_rate=0.01
epochs=10train_loader = torch.utils.data.DataLoader(datasets.MNIST('../data', train=True, download=True,transform=transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.1307,), (0.3081,))])),batch_size=batch_size, shuffle=True)
test_loader = torch.utils.data.DataLoader(datasets.MNIST('../data', train=False, transform=transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.1307,), (0.3081,))])),batch_size=batch_size, shuffle=True)#Network Architecture
w1, b1 = torch.randn(200, 784, requires_grad=True),\torch.zeros(200, requires_grad=True)
w2, b2 = torch.randn(200, 200, requires_grad=True),\torch.zeros(200, requires_grad=True)
w3, b3 = torch.randn(10, 200, requires_grad=True),\torch.zeros(10, requires_grad=True)
#kaiming初始化
torch.nn.init.kaiming_normal_(w1)
torch.nn.init.kaiming_normal_(w2)
torch.nn.init.kaiming_normal_(w3)def forward(x):x = x@w1.t() + b1x = F.relu(x)x = x@w2.t() + b2x = F.relu(x)x = x@w3.t() + b3x = F.relu(x)return xoptimizer = optim.SGD([w1, b1, w2, b2, w3, b3], lr=learning_rate)
# cross-entropy 等同于 softmax + log + nll_loss三个和
criteon = nn.CrossEntropyLoss()for epoch in range(epochs):for batch_idx, (data, target) in enumerate(train_loader):data = data.view(-1, 28*28)logits = forward(data)loss = criteon(logits, target)optimizer.zero_grad()loss.backward()optimizer.step()if batch_idx % 100 == 0:print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(epoch, batch_idx * len(data), len(train_loader.dataset),100. * batch_idx / len(train_loader), loss.item()))test_loss = 0correct = 0for data, target in test_loader:data = data.view(-1, 28 * 28)logits = forward(data)test_loss += criteon(logits, target).item()pred = logits.data.max(1)[1]correct += pred.eq(target.data).sum()test_loss /= len(test_loader.dataset)print('\nTest set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n'.format(test_loss, correct, len(test_loader.dataset),100. * correct / len(test_loader.dataset)))
注意事项:
- Batch_Size太小导致收敛过慢,太大导致易陷入sharp minima,泛化性不好
- 注意初始化这个关键步骤
三、Sequential与CPU加速-Mnist
import torch
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transformsbatch_size=200
learning_rate=0.01
epochs=10train_loader = torch.utils.data.DataLoader(datasets.MNIST('../data', train=True, download=True,transform=transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.1307,), (0.3081,))])),batch_size=batch_size, shuffle=True)
test_loader = torch.utils.data.DataLoader(datasets.MNIST('../data', train=False, transform=transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.1307,), (0.3081,))])),batch_size=batch_size, shuffle=True)class MLP(nn.Module):def __init__(self):super(MLP, self).__init__()self.model = nn.Sequential(nn.Linear(784, 200),nn.LeakyReLU(inplace=True),nn.Linear(200, 200),nn.LeakyReLU(inplace=True),nn.Linear(200, 10),nn.LeakyReLU(inplace=True),)def forward(self, x):x = self.model(x)return xdevice = torch.device('cuda:0')
net = MLP().to(device)
optimizer = optim.SGD(net.parameters(), lr=learning_rate)
criteon = nn.CrossEntropyLoss().to(device)for epoch in range(epochs):for batch_idx, (data, target) in enumerate(train_loader):data = data.view(-1, 28*28)data, target = data.to(device), target.cuda()logits = net(data)loss = criteon(logits, target)optimizer.zero_grad()loss.backward()optimizer.step()if batch_idx % 100 == 0:print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(epoch, batch_idx * len(data), len(train_loader.dataset),100. * batch_idx / len(train_loader), loss.item()))test_loss = 0correct = 0for data, target in test_loader:data = data.view(-1, 28 * 28)data, target = data.to(device), target.cuda()logits = net(data)test_loss += criteon(logits, target).item()pred = logits.argmax(dim=1)correct += pred.eq(target).float().sum().item()test_loss /= len(test_loader.dataset)print('\nTest set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n'.format(test_loss, correct, len(test_loader.dataset),100. * correct / len(test_loader.dataset)))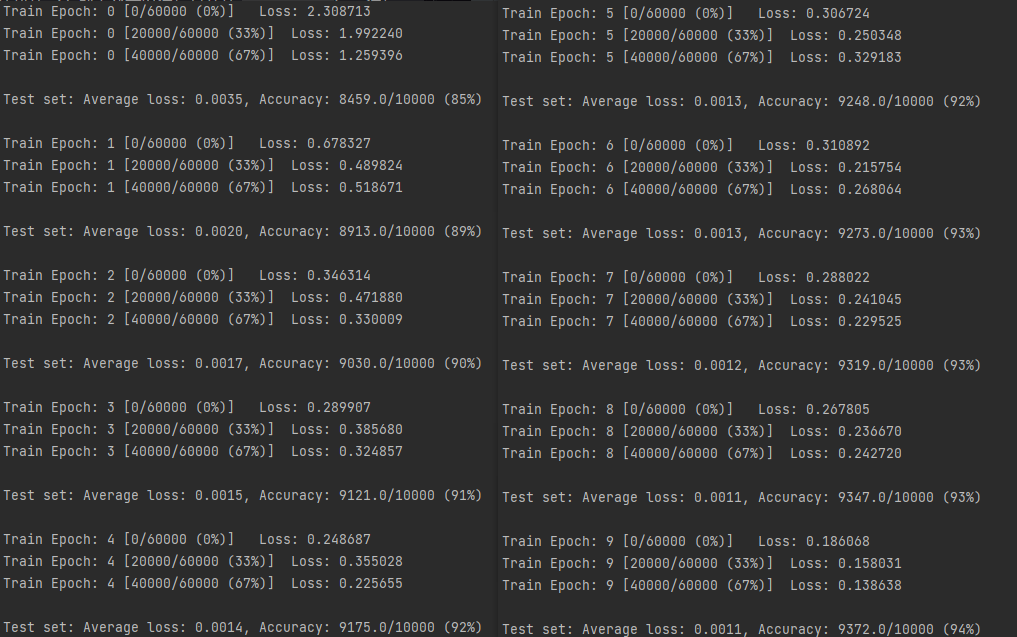
注意事项:
- MLP Class中对继承自父类的属性进行初始化,而且是用父类的初始化方法来初始化继承的属性。
- Sequential 本质是一个可以添加组件的模块,输入通过组成的流水线后得到输出
- 对于单卡计算机而言,使用torch.device(‘cuda’) 与 torch.device(‘cuda:0’)相同
四、visidom可视化
import torch
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transforms
from visdom import Visdombatch_size=200
learning_rate=0.01
epochs=10train_loader = torch.utils.data.DataLoader(datasets.MNIST('../data', train=True, download=True,transform=transforms.Compose([transforms.ToTensor(),# transforms.Normalize((0.1307,), (0.3081,))])),batch_size=batch_size, shuffle=True)
test_loader = torch.utils.data.DataLoader(datasets.MNIST('../data', train=False, transform=transforms.Compose([transforms.ToTensor(),# transforms.Normalize((0.1307,), (0.3081,))])),batch_size=batch_size, shuffle=True)class MLP(nn.Module):def __init__(self):super(MLP, self).__init__()self.model = nn.Sequential(nn.Linear(784, 200),nn.LeakyReLU(inplace=True),nn.Linear(200, 200),nn.LeakyReLU(inplace=True),nn.Linear(200, 10),nn.LeakyReLU(inplace=True),)def forward(self, x):x = self.model(x)return xdevice = torch.device('cuda:0')
net = MLP().to(device)
optimizer = optim.SGD(net.parameters(), lr=learning_rate)
criteon = nn.CrossEntropyLoss().to(device)viz = Visdom()viz.line([0.], [0.], win='train_loss', opts=dict(title='train loss'))
viz.line([[0.0, 0.0]], [0.], win='test', opts=dict(title='test loss&acc.',legend=['loss', 'acc.']))
global_step = 0for epoch in range(epochs):for batch_idx, (data, target) in enumerate(train_loader):data = data.view(-1, 28*28)data, target = data.to(device), target.cuda()logits = net(data)loss = criteon(logits, target)optimizer.zero_grad()loss.backward()optimizer.step()global_step += 1viz.line([loss.item()], [global_step], win='train_loss', update='append')if batch_idx % 100 == 0:print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(epoch, batch_idx * len(data), len(train_loader.dataset),100. * batch_idx / len(train_loader), loss.item()))test_loss = 0correct = 0for data, target in test_loader:data = data.view(-1, 28 * 28)data, target = data.to(device), target.cuda()logits = net(data)test_loss += criteon(logits, target).item()pred = logits.argmax(dim=1)correct += pred.eq(target).float().sum().item()viz.line([[test_loss, correct / len(test_loader.dataset)]],[global_step], win='test', update='append')viz.images(data.view(-1, 1, 28, 28), win='x')viz.text(str(pred.detach().cpu().numpy()), win='pred',opts=dict(title='pred'))test_loss /= len(test_loader.dataset)print('\nTest set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n'.format(test_loss, correct, len(test_loader.dataset),100. * correct / len(test_loader.dataset)))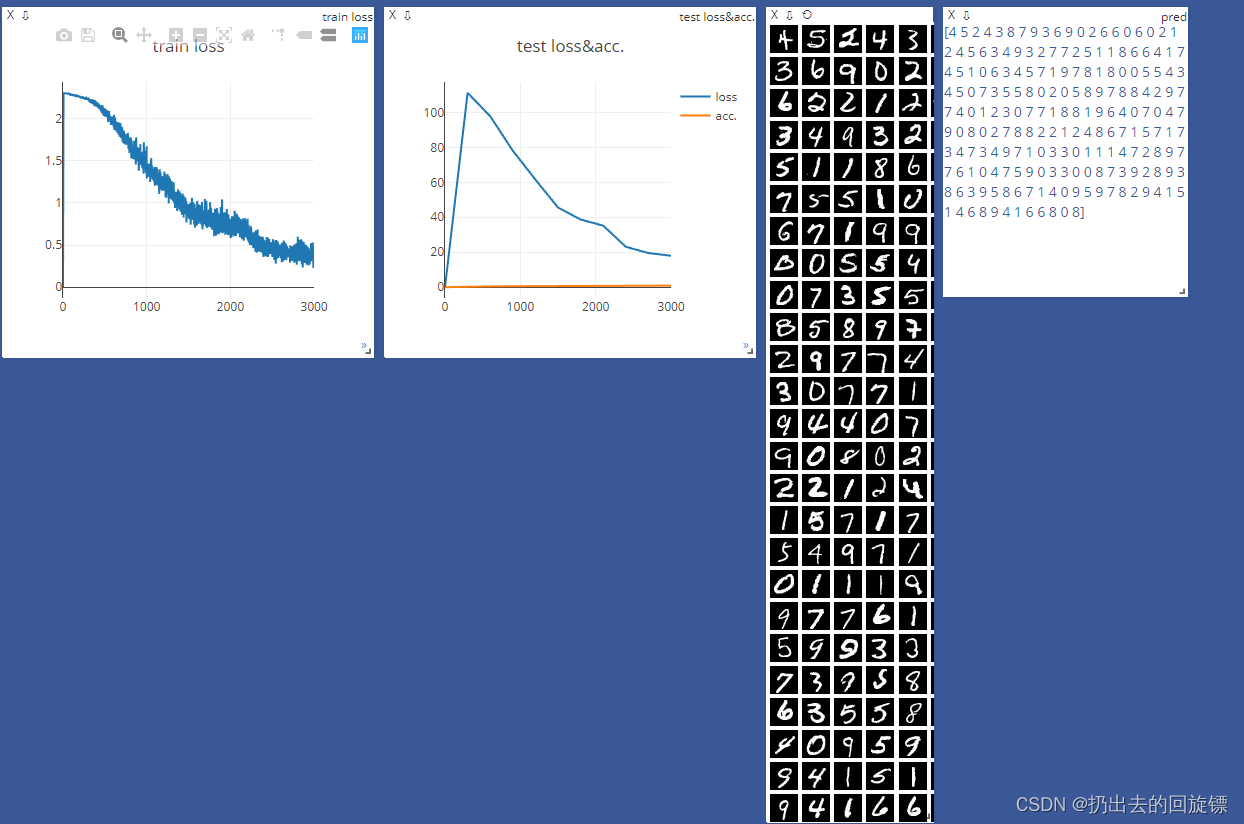
相关文章:
ccc-pytorch-小实验合集(4)
文章目录一、 Himmelblau 优化二、多分类实战-Mnist三、Sequential与CPU加速-Mnist四、visidom可视化一、 Himmelblau 优化 Himmelblau 是一个具有4个最优值的2维目标函数。其函数和最优值点如下: 图象绘制: import numpy as np from matplotlib impo…...

webrtc音频系列——4、RTP与RTCP协议
如果让你从0开发一套实时互动直播系统,你首先要选择网络传输协议。UDP 还是 TCP?答案是:UDP。为什么实时传输不能用 TCP ?TCP 的目的就是实现数据的可靠传输,因此他有一套 握手,发送 -> 确认,…...
)
C++枚举解读(enum)
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录前言一、枚举是什么?二、使用步骤1.作用域2.隐式类型转换3.显式指定枚举值类型4.指定枚举值的值4.整形显式转换成枚举总结前言 对于开发C来说࿰…...
)
OSCP-课外5(Web图片泄露服务信息、日志中毒)
目录 一、主机发现与端口扫描 二、Web信息收集 三、系统信息收集与提权 一、主机发现与端口扫描...
汇编指令学习(ADD,SUB,MUL,DIV,XADD,INC,DEC,NEG)
一、ADD加法操作指令将eax置1,ebx置2,运行下面命令,将结果保存到eaxadd eax,ebx扩展:adc需要再加上CF标志位的值adc eax,ebx二、SUB减法操作指令将eax置3,ebx置2,运行下面命令,将结果…...

【电源专题】案例:充电芯片损坏为什么判断是从NTC进入的EOS
最近有发现一个异常就是测试部测试测试然后充电芯片就无法使用了。通过二极管特性分析(参考文章:电源专题】案例:电源芯片厂家怎么判断电源芯片端口是否损坏)是NTC管脚已经损坏对地短路了。但是以前没有发现这个问题,最近更换了芯片后就发现的特别明显。 首先分析一下现在…...
C语言中的数据储存规则
写在开头 关于复习的相关内容其实从一开始就列出了大纲,但是迟迟没有开始复习,一方面是因为学校学业却是繁忙,另一方面还是内心对旧知识掌握不熟练需要再学一遍的畏惧和懒惰,但如今,复习必须开始了。今天我从C语言的最…...
Android kotlin实战之协程suspend详解与使用
前言 Kotlin 是一门仅在标准库中提供最基本底层 API 以便各种其他库能够利用协程的语言。与许多其他具有类似功能的语言不同,async 与 await 在 Kotlin 中并不是关键字,甚至都不是标准库的一部分。此外,Kotlin 的 挂起函数 概念为异步操作提供…...

Pycharm中的Virtualenv Environment、Conda Environment
版本一 Conda Environment该不该选? 先说结论,该选,而且还是正解。前提是你打算"用Anaconda来管理各种Python环境,同时管理Python下面的各种包"。 选了Conda Environment意味着什么? 意味着你以后如果要装新的包的话…...

C++容器介绍:vector
目录vector简介使用方法1.头文件2.vector声明及初始化3.vector基本操作(1). 容量(2). 修改(3)迭代器(4)元素的访问(5)算法vector 简介 vector是表示可变大小数组的序列容器。就像数组一样,vector也采用的连续存储空间来存储元素。也就是意味着可以采用下标对vecto…...
抗锯齿和走样(笔记)
Artifacts(瑕疵): 比如人眼采样频率跟不上陀螺的旋转速度,这时就有可能看到陀螺在反方向旋转怎么做抗锯齿(滤波): 在采样之前先进行一个模糊操作,可以降低锯齿的明显程度 通过傅里叶…...
线程池的使用——线程池的创建方式
线程池的使用——创建线程线程池的创建线程池的创建方式Executors.newFixedThreadPool:Executors.newCachedThreadPool:Executors.newSingleThreadExecutor:Executors.newScheduledThreadPool:Executors.newSingleThreadScheduled…...
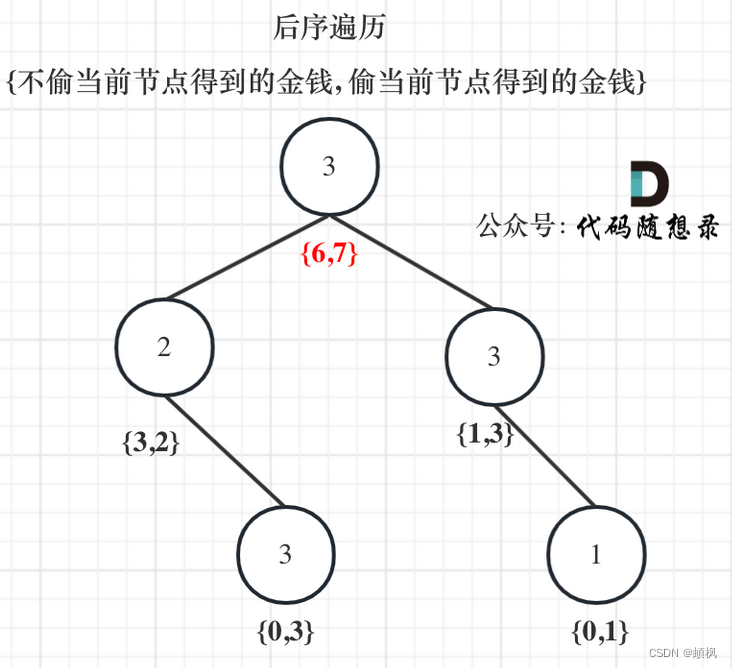
代码随想录算法训练营day47 |动态规划 198打家劫舍 213打家劫舍II 337打家劫舍III
day47198.打家劫舍1.确定dp数组(dp table)以及下标的含义2.确定递推公式3.dp数组如何初始化4.确定遍历顺序5.举例推导dp数组213.打家劫舍II情况一:考虑不包含首尾元素情况二:考虑包含首元素,不包含尾元素情况三&#x…...
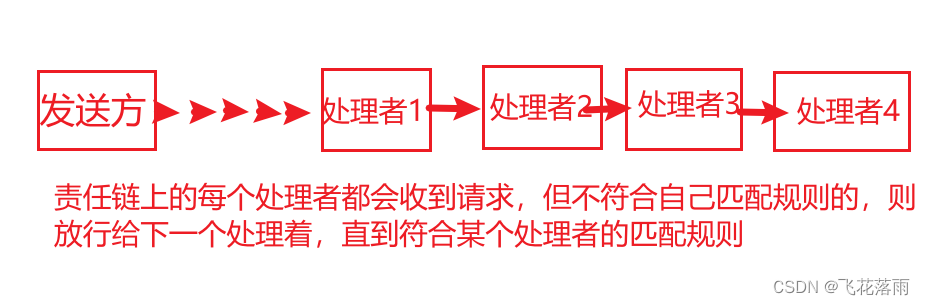
项目设计模式和规范
1、责任链模式 自己的理解:避免发生方与接收方解耦 优点:①降低发送方与接收方的耦合 ②简化他们对象 ③方便扩展新增 处理者 缺点:①不方便排错 ②性能问题,且使用不当容易搞出死循环 应用场景:拦截器 Interceptor和过滤器 filter:符合模式的进行拦截或者过滤到,然…...

无线WiFi安全渗透与攻防(一)之无线安全环境搭建
无线安全环境搭建 1.802.11标准 (1).概念 802.11标准是1997年IEEE最初制定的一个WLAN标准,工作在2.4GHz开放频段,支持1Mbit/s和2Mbit/s的数据传输速率,定义了物理层和MAC层规范,允许无线局域网及无线设备…...
【matplotlib】可视化解决方案——如何解决matplotlib中文乱码问题
问题概述 Matplotlib 默认不支持中文字体,这是因为 matplotlib 只支持 ASCII 字符,但是国人使用 matplotlib 肯定需要中文标注。如下图所示,当不对 Matplotlib 进行设置,而直接使用中文时,绘制的图像会出现中文乱码。…...
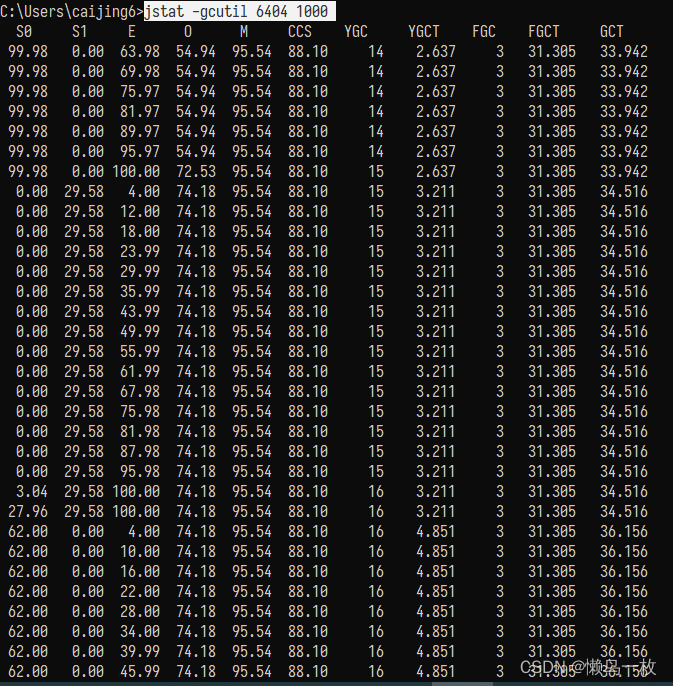
JAVA开发中GC日志打印简单通用的配置详解
如何配置一个完美的JVM日志打印信息 打印内容 打印基本的GC信息 打印对象分布情况 GC后打印堆数据 打印STW时间 打印safepoint信息 打印Reference处理信息 综上所述,最终的参数如下: 还有哪些问题呢?是不是有文件输出更好? 打印日…...

十进制的小数如何转二进制?二进制表示的小数如何转十进制?
😄 基础不牢,地动山摇~ 补补基础~ 文章目录 1、十进制的小数转二进制?2、二进制表示的小数转十进制?3、做道coding题巩固下:1、十进制的小数转二进制? 整数部分: 用普通的二进制表示即可。小数部分: 首先,将小数部分乘以2,取出整数部分作为二进制表示的第1位;然后…...
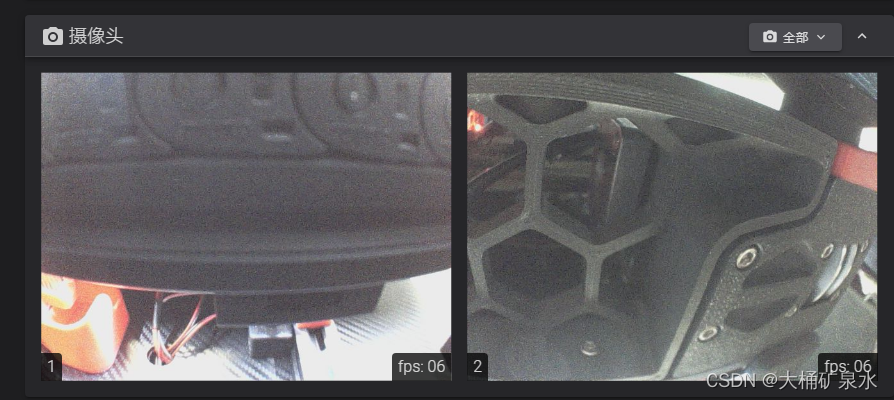
klipper使用webcam设置多个摄像头方式
一、前言 使用klipper设置多个摄像头,折腾了好些天,网上资料很少,这里写一个帖子记录一下 二、环境 参考链接:https://www.cnblogs.com/sjqlwy/p/klipper_webcam.html 我的klipper安装在香橙派上面,系统是debian&a…...
风力发电机组浪涌保护器安全防护方案
风机的庞大与危险高空作业注定了其在基建和维护中不易操作,风机设备的主电源、过程控制、网络与通讯、现场设备需要高等级的防雷浪涌保护器冲击保护,提高系统及设备的可靠性和可用性。风电场的主要发电设备风力发电机组“大风车”是风电场的主要发电设备…...

PHP批量导出数据,CSV格式文件 - 支持几十万行数据无压力
目录 一、前言 二、解决方案 三、示例 一、前言 之前做数据批量导出一直都是用的PHPExcel插件,一个是由于现在PHPExcel已经不再维护了,一个是如果导出大批量数据,导出的表格就会提示数据损坏、文件不完整之类的提示,就是打不开…...

基于Next.js 15与React 19构建现代化个人作品集:技术选型与工程实践
1. 项目概述:为什么选择 Next.js 15 构建现代个人作品集 作为一名在前后端领域摸爬滚打了十多年的开发者,我见过也亲手搭建过无数种个人作品集网站。从早期的纯静态 HTML/CSS,到 jQuery 时代,再到 React/Vue 等框架的兴起&#x…...

Superpower ChatGPT:浏览器扩展如何重塑AI对话管理与提示词工作流
1. 项目概述:Superpower ChatGPT,一个浏览器扩展的深度剖析如果你和我一样,每天都要和ChatGPT打上几个小时的交道,那你肯定也经历过这样的抓狂时刻:想找三天前那段关于Python代码优化的对话,却要在历史记录…...

Cursor Pro永久免费使用终极指南:如何绕过试用限制完整教程
Cursor Pro永久免费使用终极指南:如何绕过试用限制完整教程 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached you…...

从极坐标栅格到地面点云:一种基于坡度与邻域一致性的分割实践
1. 极坐标栅格构建:自动驾驶的"地面扫描仪" 想象你正在玩一款赛车游戏,车辆需要自动识别哪些是能开的平坦路面,哪些是必须绕开的障碍物。现实中自动驾驶车辆面临同样的挑战,而极坐标栅格就是它的"地面扫描仪"…...

从零到一:在STM32F103上构建FatFs文件系统并驱动W25Q64 Flash
1. 硬件准备与环境搭建 在开始构建FatFs文件系统之前,我们需要先准备好硬件环境。我手头用的是STM32F103C8T6最小系统板,搭配一块W25Q64 Flash芯片。这块Flash芯片容量为8MB,通过SPI接口通信,正好适合用来做文件存储介质。 首先得…...

3个核心功能+5种使用场景:FanControl帮你打造Windows平台专属散热系统
3个核心功能5种使用场景:FanControl帮你打造Windows平台专属散热系统 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitH…...

AI Agent开发实战:从核心范式到工程落地的完整指南
1. 项目概述:一场静悄悄的技术代际更迭最近和几个技术团队负责人聊天,话题总绕不开“AI Agent”。大家的感觉出奇地一致:这玩意儿的发展速度,快得有点让人喘不过气。新闻里、论文里、各种技术峰会上,关于智能体&#x…...

长期使用taotoken token plan套餐的成本节约感受
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期使用 Taotoken Token Plan 套餐的成本节约感受 对于需要稳定调用大模型 API 的个人开发者或团队而言,成本控制是一…...

初次使用Taotoken平台从注册到完成API调用的全程指引
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 初次使用Taotoken平台从注册到完成API调用的全程指引 对于初次接触大模型API的开发者而言,从注册平台到成功发出第一个…...