Ubuntu 20.04使用Livox Mid-360
参考文章:
Ubuntu 20.04使用Livox mid 360 测试 FAST_LIO-CSDN博客
一:Livox mid 360驱动安装与测试
前言:
Livox mid360需要使用Livox-SDK2,而非Livox-SDK,以及对应的livox_ros_driver2 。并需要修改FAST_LIO中部分代码。
1. 安装Livox-SDK2
参照官方教程:GitHub - Livox-SDK/Livox-SDK2: Drivers for receiving LiDAR data and controlling lidar, support Lidar HAP and Mid-360.
2.在ROS空间下编译安装FAST_LIO源码
2.1. 创建ROS1工程
mkdir livox_ws/src
2.2 在src文件夹中下载livox_ros_driver2源码
git clone https://github.com/Livox-SDK/livox_ros_driver2.git
3.编译工程
在工程目录的livox_ws/src/livox_ros_driver2使用下面指令编译,不要直接使用catkin_make.
cd src/livox_ros_driver2
./build.sh ROS14. 修改Livox mid360的配置
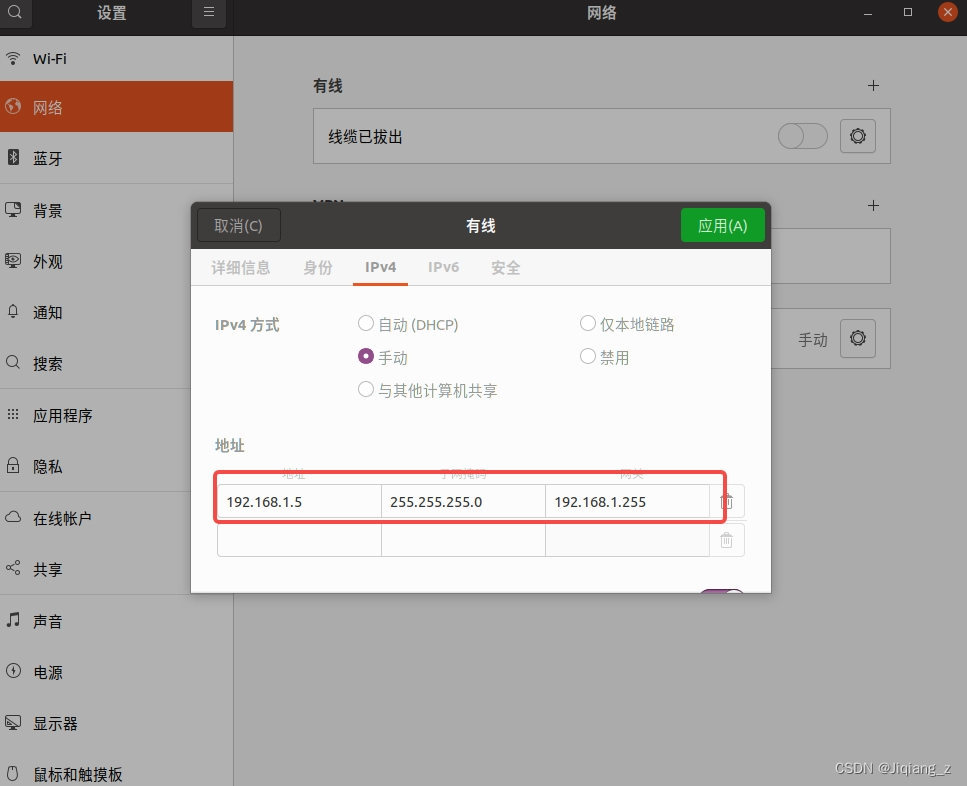
4.1. 修改电脑IP地址
建议电脑ip修改为192.168.1.5,否则需要修改下面的配置文件中对应的电脑ip,DNS地址写不写无所谓。(这里是网络有线那里的ip地址)
4.2. 修改Livox mid360 IP
获取Livox mid360 IP的方式有两种;
4.2.1 通过出厂编号获取
打开文件livox_ws/src/livox_ros_driver2/config/MID360_config.json。Livox mid360的IP是出厂后已经固定下来的,看它上面的二维码下面的 SN 码 ,后两个数字前面再加一个1,便是其对应的ip。(例如 SN 码后两位数字为26,那它对应的ip就是192.168.1.126)。
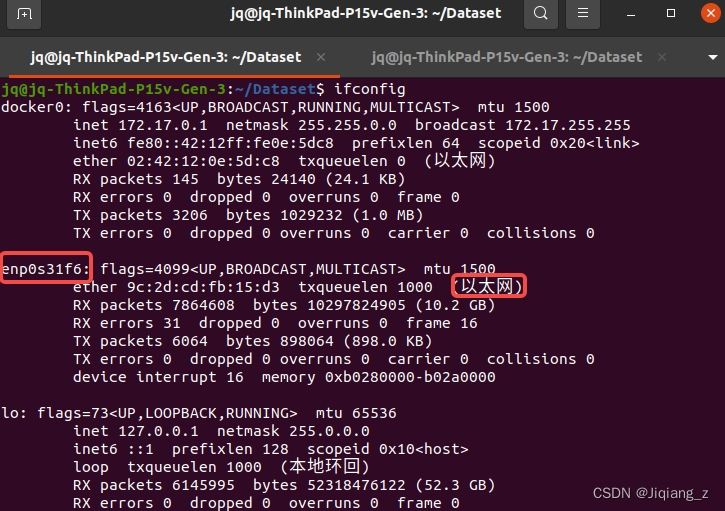
4.2.2 通过wireshark工具读取雷达端口ip
查看接受雷达数据的网口:
ifconfig
使用以下命令安装wireshark
sudo apt-get install wireshark
运行wireshark工具
sudo wireshark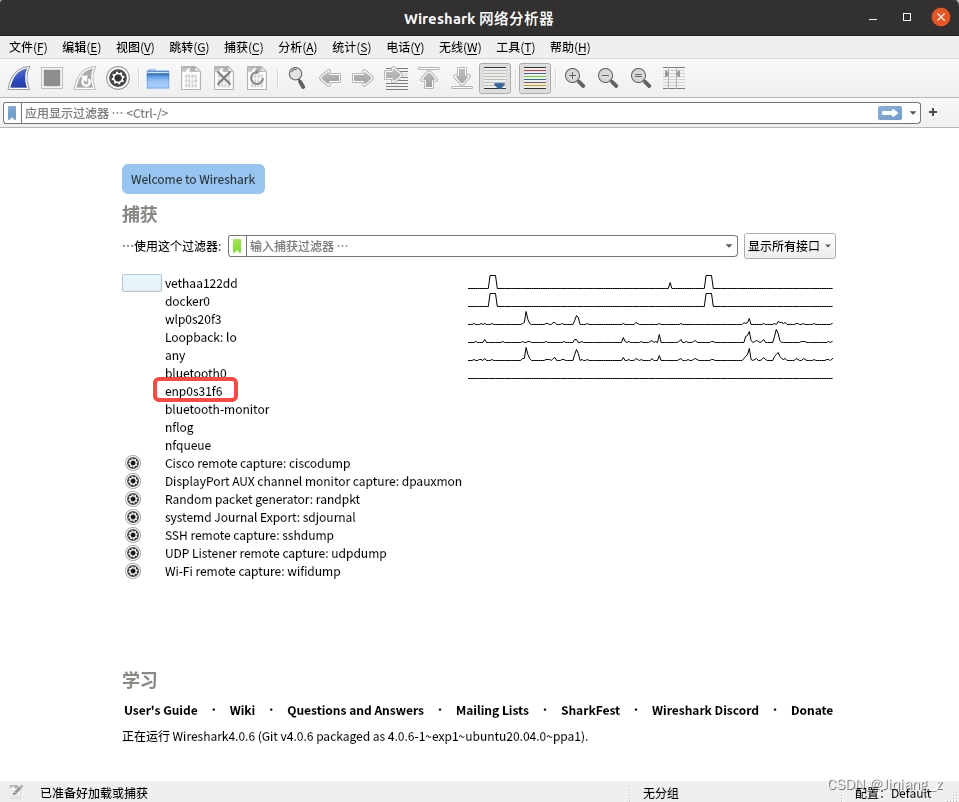
 修改配置文件,打开打开文件livox_ws/src/livox_ros_driver2/config/MID360_config.json。
修改配置文件,打开打开文件livox_ws/src/livox_ros_driver2/config/MID360_config.json。
{"lidar_summary_info" : {"lidar_type": 8},"MID360": {"lidar_net_info" : {"cmd_data_port": 56100,"push_msg_port": 56200,"point_data_port": 56300,"imu_data_port": 56400,"log_data_port": 56500},"host_net_info" : {"cmd_data_ip" : "192.168.1.5", # <-这里和修改后的电脑ip一致"cmd_data_port": 56101,"push_msg_ip": "192.168.1.5", # <-这里和修改后的电脑ip一致"push_msg_port": 56201,"point_data_ip": "192.168.1.5", # <-这里和修改后的电脑ip一致"point_data_port": 56301,"imu_data_ip" : "192.168.1.5", # <-这里和修改后的电脑ip一致"imu_data_port": 56401,"log_data_ip" : "","log_data_port": 56501}},"lidar_configs" : [{"ip" : "192.168.1.126", # <-这里是Livox mid360的ip"pcl_data_type" : 1,"pattern_mode" : 0,"extrinsic_parameter" : {"roll": 0.0,"pitch": 0.0,"yaw": 0.0,"x": 0,"y": 0,"z": 0}}]
}
5.运行测试
打开两个终端,分别运行:
source devel/setup.bash
roslaunch livox_ros_driver2 rviz_MID360.launch
也可以在终端对于话题数据进行打印
rostoptic list
rostoptic echo /livox/lidar运行成功截图如下:
 二:使用Livox mid360 录制数据包
二:使用Livox mid360 录制数据包
前言:录制rosbag包之前,需要先使各种传感器处于工作状态,例如Livox mid360需要启动先前安装好的驱动。此外还要确保每个传感器的时间戳同步。
source devel/setup.bash
roslaunch livox_ros_driver2 rviz_MID360.launch
1. 话题录制
1.1 录制所有发布出来的话题,此时默认将话题保存在一个以当时时间戳命名的文件夹中:
rosbag record -a
1.2 录制指定话题
rosbag record /topic1 /topic12 -o out.bag
2. 话题回放
2.1 基本回放
rosbag play <your bagfile name>
2.2 等待一定时间之后发布bag文件中的内容
rosbag play <your bagfile name> -d <delay time>
2.3按一定频率回放,-r选项用来设定消息发布速率,如下面命令则表示以3倍原始速率发布话题
rosbag play -r 3 <your bagfile name>2.4 回放指定话题
rosbag play <your bagfile name> --topics <topics>2.5 创建一个除了/tf消息的新包
rosbag filter file.bag file-no-tf.bag "topic != '/tf'"2.6 重映射topic信息(将out.bag中point_cloud转为velodyne_points)
rosbag play out.bag /point_cloud:=/velodyne_points2.7 播放bag并重新生成一个新包
rosbag record -O mahao_1.bag /velodyne_points2.8 查看bag中对应topic的frame_id
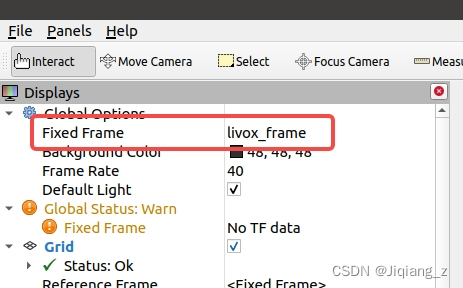
rostopic echo /topic | grep frame_id注:当播放rosbag包,想要在rviz中查看时,需要将rviz中的Fixed Frame换成bag中对应topic的frame_id
3.数据包截取
在使用rosbag录包的时候,我们有时候只需包中的某一段时间,因此就有必要按时间截取rosbag包。
3.1 在rosbag包目录下启动终端
3.2 按时间截取
rosbag filter 原始包名.bag 截取后的包名.bag "t.to_sec() > 开始时间 and t.to_sec() < 结束时间"Exemple:
rosbag filter lidar_zed4.bag lidar_zed4_filter.bag "t.to_sec() > 1641196460.608130 and t.to_sec() < 1641196485.7"注意:时间是Bag Time,可以在回放rosbag包的时候看到。
相关文章:
Ubuntu 20.04使用Livox Mid-360
参考文章: Ubuntu 20.04使用Livox mid 360 测试 FAST_LIO-CSDN博客 一:Livox mid 360驱动安装与测试 前言: Livox mid360需要使用Livox-SDK2,而非Livox-SDK,以及对应的livox_ros_driver2 。并需要修改FAST_LIO中部…...

C语言之冒泡排序
其实排序有很多的方法,比如:冒泡排序,插入排序,快速排序,归并排序,选择排序等。今天来讲一下最简单的排序:冒泡排序。这种排序的方法效率极其低下。 假设有一个整型数组: int arr[…...
)
在Linux上安装NVM(Node Version Manager)
在Linux系统上,使用NVM(Node Version Manager)是管理和切换Node.js版本的一种便捷方式。以下是在Linux上安装NVM的步骤: 1. 下载并安装NVM 使用curl或wget下载并运行NVM的安装脚本。选择一种方式执行以下命令之一: …...

常用两种Linux命令生成器
在Linux中,可以使用多种命令来生成随机密码。以下是其中两种常用的命令: 1.pwgen:这个命令可以生成随机、无意义的但容易发音的密码。生成的密码可以只包含小写字母、大小写混合或数字。大写字母和数字会以一种便于记忆的方式放置࿰…...

【OAuth2】授权框架的四种授权方式详解
🎉🎉欢迎来到我的CSDN主页!🎉🎉 🏅我是Java方文山,一个在CSDN分享笔记的博主。📚📚 🌟推荐给大家我的专栏《OAuth 2》。🎯🎯 …...

AI数字人不间断直播是什么?数字人直播带货如何搭建?
随着电商行业的崛起,数字人直播成为了最为热门的直播方式之一。数字人直播利用AI技术创建出的数字人进行直播,给观众带来了全新的视觉体验。 一、AI数字人无限播(数字人SaaS系统VX:zhibo175)是什么? AI数字…...
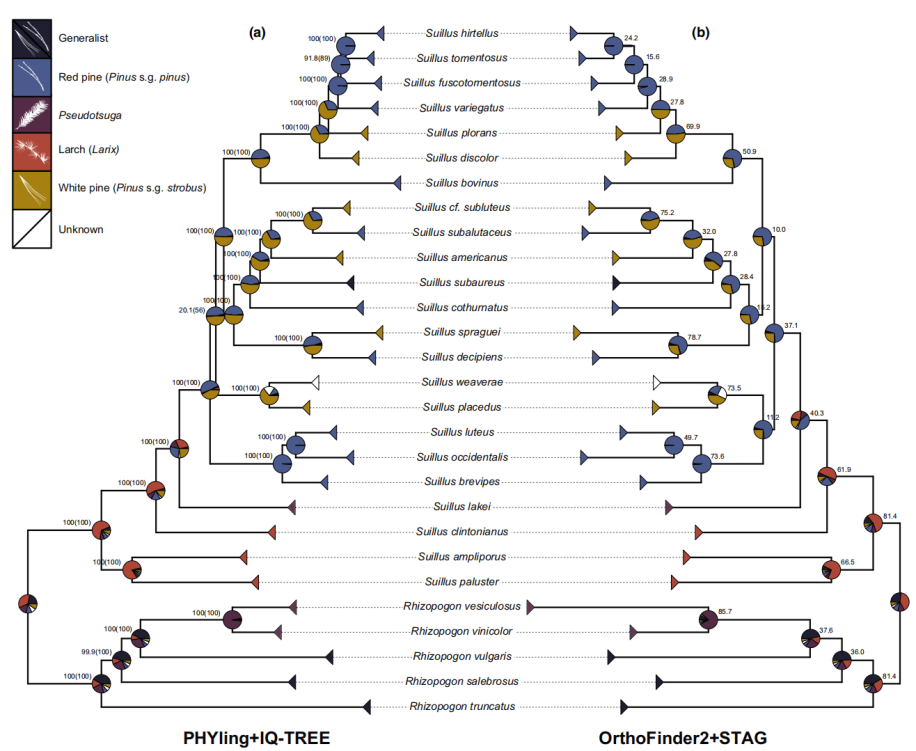
真菌基因组研究高分策略(二):比较基因组揭示寄主外生菌根真菌基因组的动态进化
在表征外生菌根(ECM)真菌的“共生工具包”方面的研究已经取得了重大进展,但宿主特异性如何被编码到ECM真菌基因组中仍知之甚少。2021年发表于《New Phytologist》期刊的文章对ECM真菌宿主特异性和通用性进行了比较基因组分析,重点…...
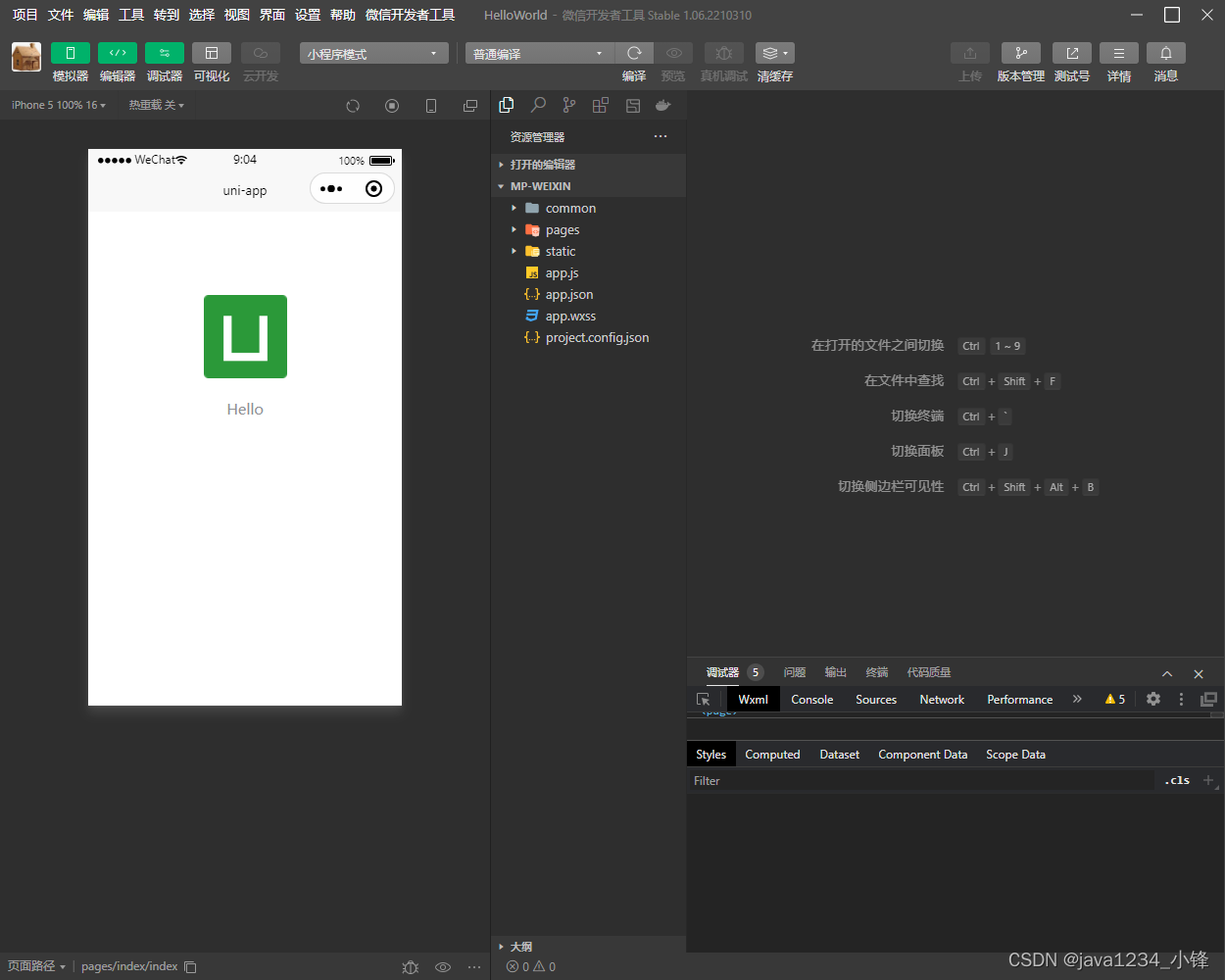
uni-app之HelloWorld实现
锋哥原创的uni-app视频教程: 2023版uniapp从入门到上天视频教程(Java后端无废话版),火爆更新中..._哔哩哔哩_bilibili2023版uniapp从入门到上天视频教程(Java后端无废话版),火爆更新中...共计23条视频,包括:第1讲 uni…...
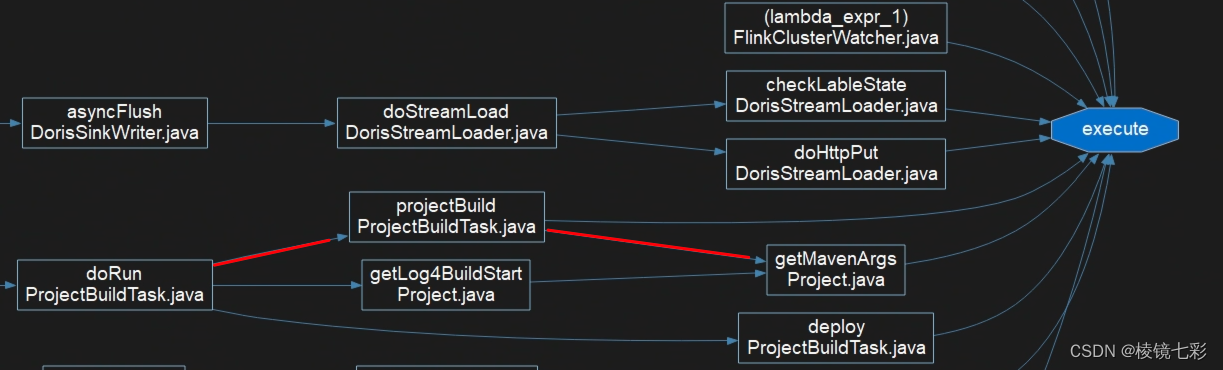
CVE-2023-49898 Apache incubator-streampark 远程命令执行漏洞
项目介绍 Apache Flink 和 Apache Spark 被广泛用作下一代大数据流计算引擎。基于大量优秀经验结合最佳实践,我们将任务部署和运行时参数提取到配置文件中。这样,带有开箱即用连接器的易于使用的 RuntimeContext 将带来更轻松、更高效的任务开发体验。它…...

即将来临的2024年,汽车战场再起波澜?
我们来简要概况一下11月主流车企的销量表现: 根据数据显示,11月吉利集团总销量29.32万辆,同比增长28%。这在当月国内主流车企中综合实力凌厉,可谓表现得体。而与吉利直接竞争的比亚迪,尽管数据未公布,但我们…...

Python 爬虫之下载视频(二)
爬取某Y的视频链接和标题 文章目录 爬取某Y的视频链接和标题前言一、基本思路二、程序解析阶段三、程序处理阶段总结 前言 这篇内容就简单给大家写个如何从网页上爬取某B主 主页 页面上所有的视频链接和视频标题。 这篇是基础好好看,下篇会根据这篇的结果做一个批…...

智能优化算法应用:基于原子轨道搜索算法3D无线传感器网络(WSN)覆盖优化 - 附代码
智能优化算法应用:基于原子轨道搜索算法3D无线传感器网络(WSN)覆盖优化 - 附代码 文章目录 智能优化算法应用:基于原子轨道搜索算法3D无线传感器网络(WSN)覆盖优化 - 附代码1.无线传感网络节点模型2.覆盖数学模型及分析3.原子轨道搜索算法4.实验参数设定…...
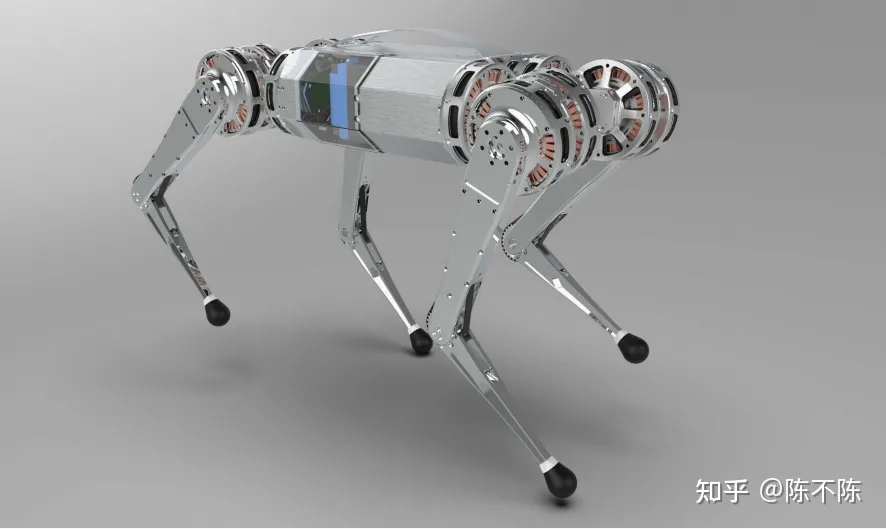
[机器人-2]:开源MIT Min cheetah机械狗设计(二):机械结构设计
目录 1、四肢朝向的选择 2、电机布局形式的选择 3、电机的选型及测试(非常重要) 4、结构优化 5、尺寸效应 6、其他 1、四肢朝向的选择 机械狗的结构设计,第一个摆在我们面前的就说四肢的朝向问题,如下图,我们是…...
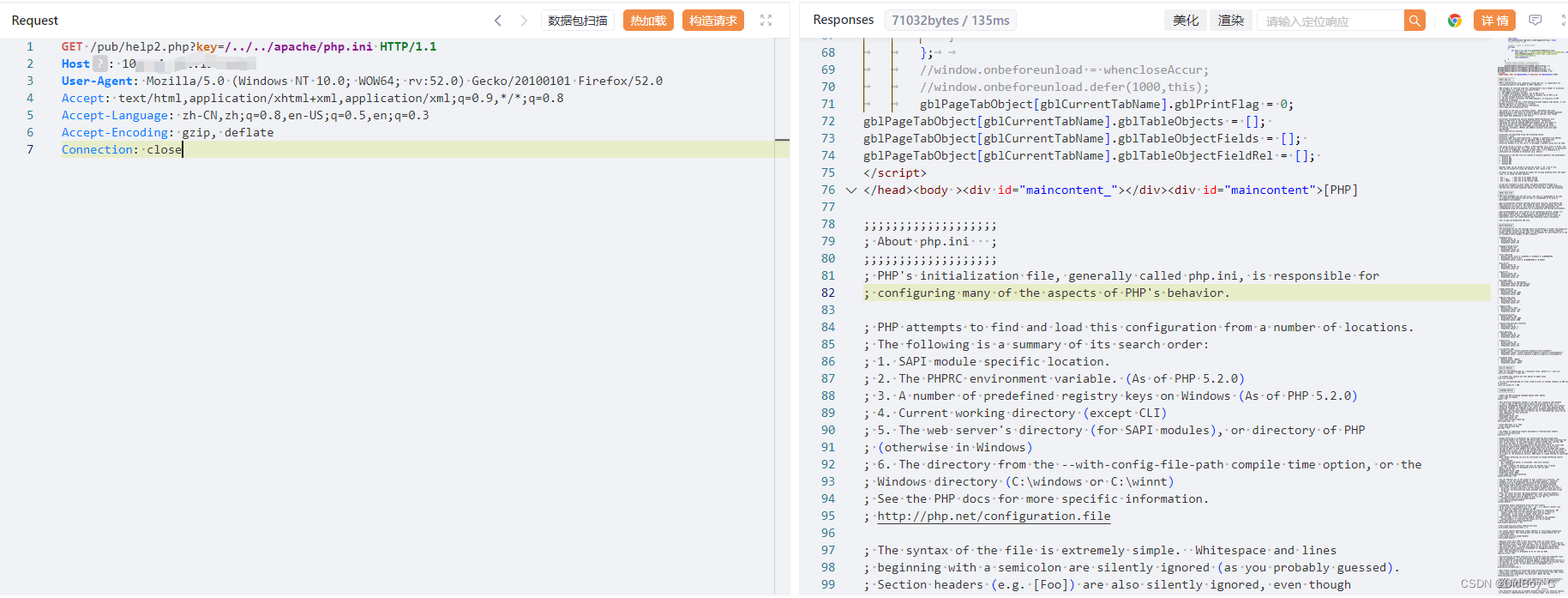
用友U8+CRM help2 任意文件读取漏洞复现
0x01 产品简介 用友U8 CRM客户关系管理系统是一款专业的企业级CRM软件,旨在帮助企业高效管理客户关系、提升销售业绩和提供优质的客户服务。 0x02 漏洞概述 用友 U8 CRM客户关系管理系统 help2接口处存在任意文件读取漏洞,攻击者通过漏洞可以获取到服…...
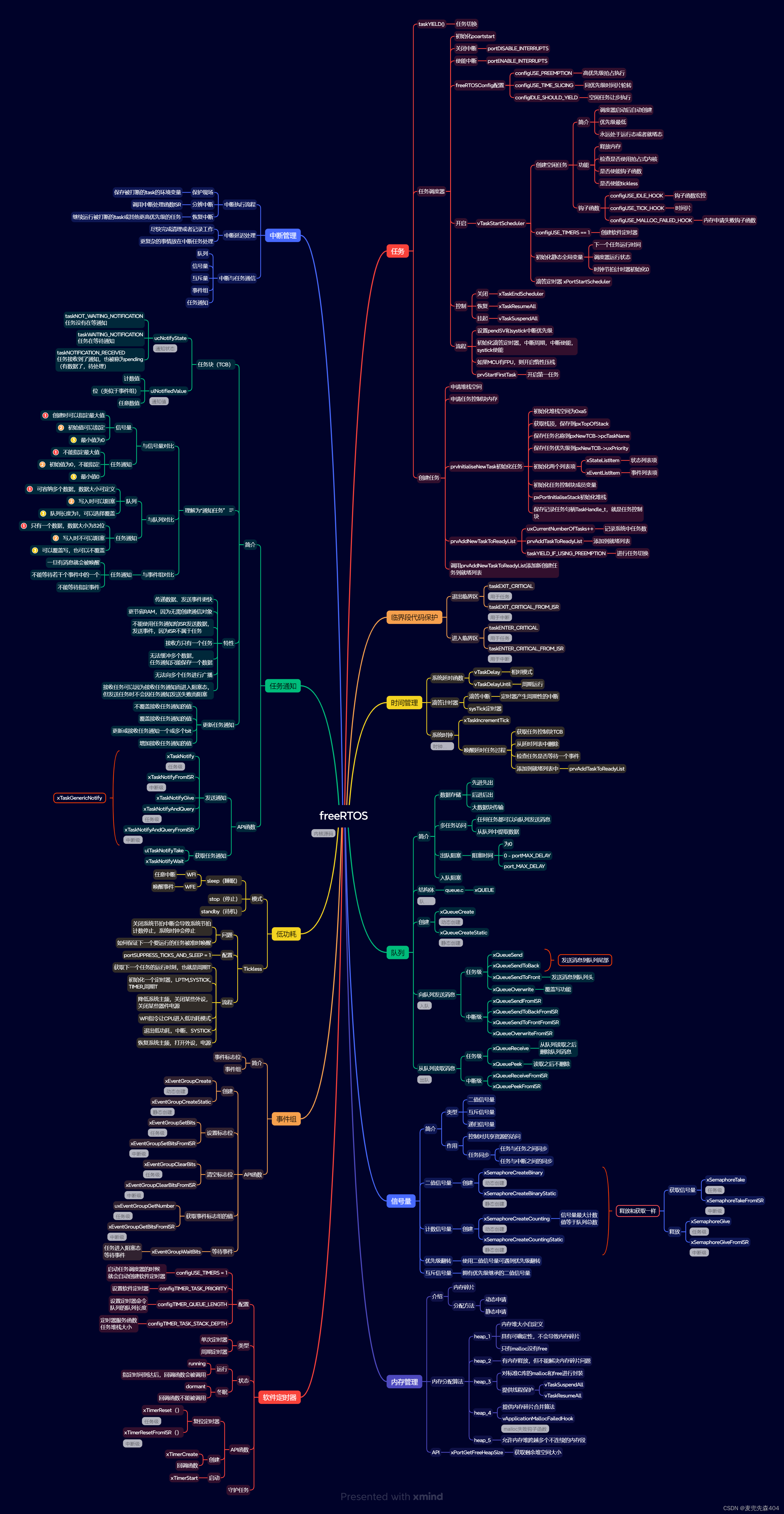
freeRTOS实时操作系统学习笔记
温馨提示:点击图片查看大图更清晰 —————————————————————————————↑↑↑上方资源下载后可获取xmind原文件。 1、freeRTOS移植和配置脑图 2、内核源码学习...
解决虚拟机卡顿、卡死、待机后不动的情况(真实有效
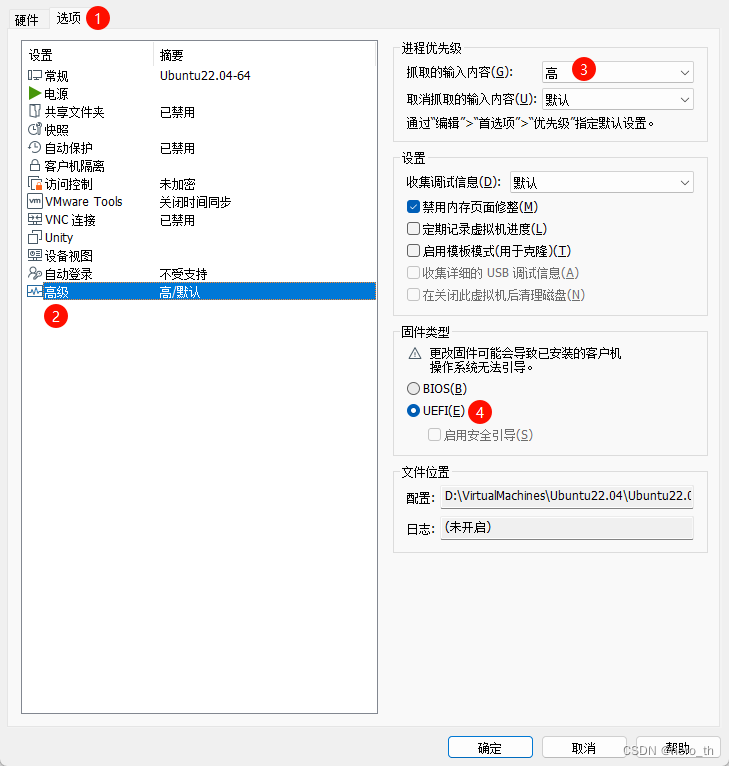
本人环境: VM workstation 17.5 ubuntu 22.04 虚拟机配置:4核 4g issue: 出现开机卡死不动运行一段时间,可能半小时不到,就页面卡死不动经常需要关机重启才解决,可能没有解决 1.配置虚拟化引擎 这一步我称…...
【MybatisPlus快速入门】(3)SpringBoot整合MybatisPlus 之 Lombok插件安装及MybatisPlus分页代码示例
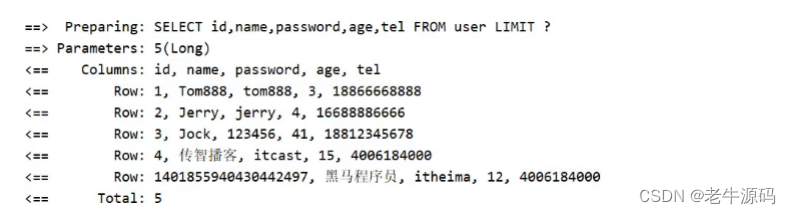
目录 1.Lombok1.1 步骤1:添加lombok依赖 2.2 步骤2:安装Lombok的插件1.3 步骤3:模型类上添加注解2 分页功能2.1 步骤1:调用方法传入参数获取返回值2.2步骤2:设置分页拦截器2.3 步骤3:运行测试程序 之前我们已学习MyBatisPlus在代码示例与MyBatisPlus的简介,在这一节…...

SpaceDesk如何连接平板/PC(生产力副屏)
1、下载安装 分为安卓端和PC端,两个设备都需要安装对应的软件。 SpaceDesk官网 https://link.zhihu.com/?targethttp%3A//spacedesk.net/ 需要魔法上网。安装过程比较简单,无脑下一步即可。 我已经把安装包准备好了,如果不想自己找&#…...
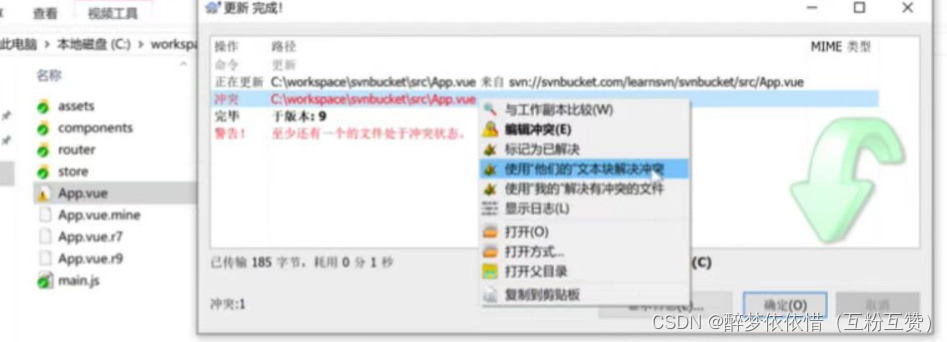
61.SVN版本控制系统
SVN(Subversion)是一种集中式版本控制系统,它有一个中央仓库用于存储代码库的完整历史记录。相对于分布式版本控制系统(例如 Git),SVN 不支持本地仓库。 一、SVN 安装。 (1)在windo…...
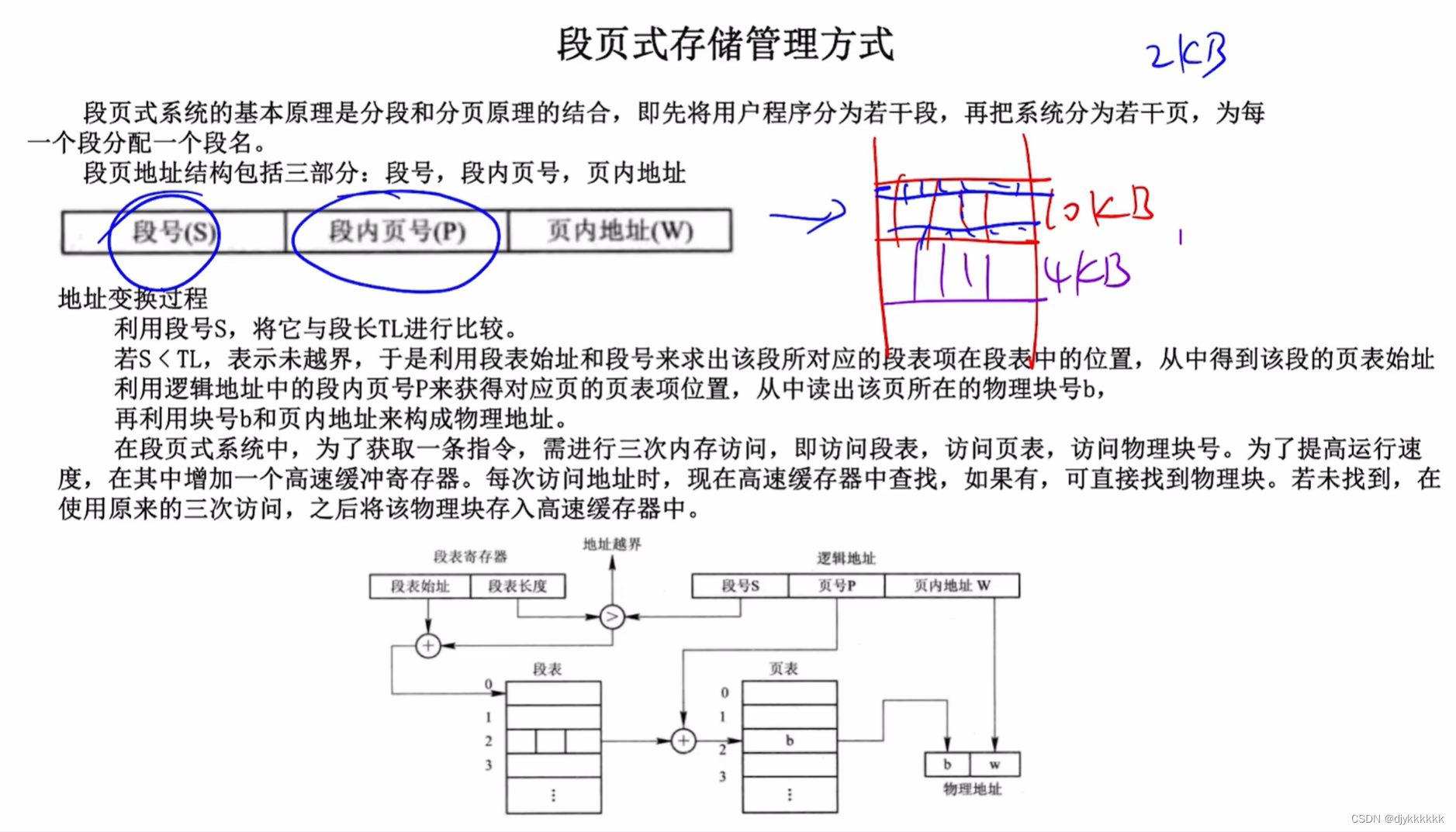
操作系统 内存管理篇
一.程序的装入和链接 装入方式: 链接方式: 二.进程的内存映像 三.内存的分配 1.连续分配 分配方式: 2.不连续分配 分页:页面大小一致 引入快表(和 cache 处理思路一致) 升级到二级页表 分段:…...

Rust异步任务取消机制:从协作式取消到结构化并发实践
1. 项目概述:当异步任务“半途而废”时在Rust的异步编程世界里,我们常常专注于如何让任务“跑起来”——用async/await优雅地处理并发,用Future描述计算,用tokio或async-std这样的运行时来驱动一切。代码逻辑清晰,从A点…...

终极解决Windows风扇控制难题:FanControl完全指南
终极解决Windows风扇控制难题:FanControl完全指南 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trending/fa/Fan…...
)
保姆级教程:为Ultralytics YOLOv8 v8.0+ 添加mAP75和mAP90输出(附完整代码与验证方法)
深度优化YOLOv8评估体系:实战添加mAP75与mAP90指标全指南 当目标检测模型的mAP50达到80%以上时,研究者常陷入性能提升的瓶颈期。此时,引入mAP75和mAP90等更严格的评估指标,能有效区分"优秀"与"卓越"模型的边界…...

告别卡顿!Flowframes让普通视频秒变丝滑的AI插帧神器
告别卡顿!Flowframes让普通视频秒变丝滑的AI插帧神器 【免费下载链接】flowframes Flowframes Windows GUI for video interpolation using DAIN (NCNN) or RIFE (CUDA/NCNN) 项目地址: https://gitcode.com/gh_mirrors/fl/flowframes 你是否曾为观看动作电影…...

iOS 18.2 Siri大模型升级:从命令响应到意图理解的混合智能架构解析
1. 项目概述:当Siri遇上ChatGPT,一次迟来的“大脑移植”作为一名长期关注移动操作系统与AI交互的从业者,我几乎第一时间就刷到了iOS 18.2 Beta 1的更新包。这次更新的标题——“Siri接入ChatGPT技术”——简单直接,却足以在圈内掀…...

ant-design 1.x版本表格头部拖拽、可拖拽列实现
表格列宽拖拽调整 — 问题总结 版本 “vue”: “2.6.11”,“vue-draggable-resizable”: “^2.3.0”,"ant-design “:”1.7.0“ 问题 1:thDom 为 null 导致 getBoundingClientRect 报错 现象: TypeError: Cannot read properties of nul…...

Linux僵死IO与不可中断睡眠分析
Linux僵死IO与不可中断睡眠分析在 Linux 系统里,有一类问题特别让人困惑:进程存在、CPU 不高,但命令卡住、服务停不下来、甚至 kill 也无效。很多这类现象最终都与不可中断睡眠状态有关,尤其常见于 IO 阻塞场景。中级阶段需要理解…...

终极免费音频编辑解决方案:告别昂贵软件,用Audacity实现专业级音频处理
终极免费音频编辑解决方案:告别昂贵软件,用Audacity实现专业级音频处理 【免费下载链接】audacity Audio Editor 项目地址: https://gitcode.com/GitHub_Trending/au/audacity 还在为音频编辑软件的高昂费用而烦恼?是否曾因复杂的专业…...

终极解决方案:让苹果触控板在Windows上获得原生级精准触控体验
终极解决方案:让苹果触控板在Windows上获得原生级精准触控体验 【免费下载链接】mac-precision-touchpad Windows Precision Touchpad Driver Implementation for Apple MacBook / Magic Trackpad 项目地址: https://gitcode.com/gh_mirrors/ma/mac-precision-tou…...

Linux服务器安全基线自动化实践:基于Ansible的加固方案
1. 项目概述与核心价值“安全加固”这个词,对于任何一个负责线上系统运维、应用部署或者个人服务器管理的朋友来说,都绝不陌生。它就像给自家房子装防盗门、安监控一样,是基础且必要的工作。然而,现实情况往往是:我们面…...