【Linux驱动】最基本的驱动框架 | LED驱动
🐱作者:一只大喵咪1201
🐱专栏:《Linux驱动》
🔥格言:你只管努力,剩下的交给时间!

目录
- 🏀最基本的驱动框架
- ⚽驱动程序框架
- ⚽编程
- 🏀LED驱动
- ⚽配置GPIO
- ⚽编程
- 驱动程序
- 映射虚拟地址
- 应用层
- 🏀总结
🏀最基本的驱动框架
Linux下一切皆文件,使用open系统调用打开文件时会得到一个文件描述符,也被叫做文件句柄。
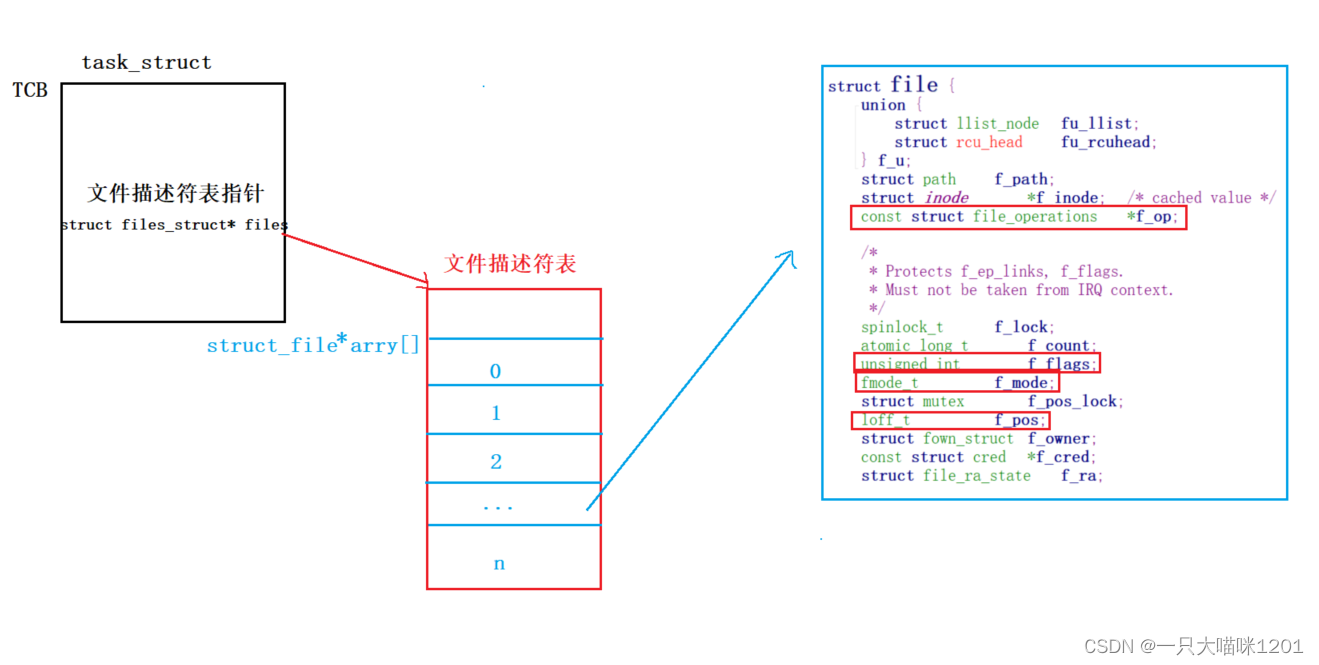
如上图所示,在打开该文件进程的PCB中有一个文件描述符表的指针struct file_struct* files,该指针指向属于该进程的文件描述符表,本质上就是一个数组,所谓文件句柄就是该数组的下标,每打开一个文件,就在该数组中放入这个文件的struct file*指针,并且返回数组的下标。
看struct file结构体的定义,在使用open时传入的flags、mode等参数都会被记录在这个结构体中,在读写文件时,文件的当前偏移地址也会保存在f_pos成员里。
- 打开字符设备节点时,内核中也会打开一个对应的
struct file结构体。
字符设备节点是一种特殊类型的文件,用于表示字符设备。这些设备通常以字符为单位进行数据的输入和输出,例如键盘或者串口。
- 字符设备节点文件通常位于 /dev目录下。

如上图所示,当应用层使用open打开字符设备节点时,在内核中会创建一个struct file结构体,并且将传入的参数记录到该结构体中,而且会使用file_operations* f_op结构体成员中的open函数指针来打开设备节点。
当应用层使用read/write函数进行读写时,也会使用file_operations* f_op结构体成员中的read/write函数指针来实现读写目的,这个结构体是由字符设备驱动程序提供的。

如上如所示file_operations结构体的部分定义,其中有read和write以及open等函数指针,当应用层使用相应的open/write/read系统调用接口时,最终会调用内核层中该结构体里对应的函数指针来实现目的。
⚽驱动程序框架
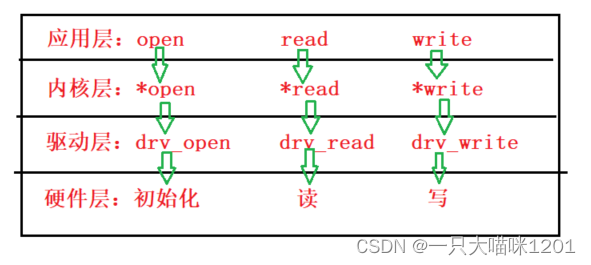
如上图所示,驱动程序的目的就是要在应用层调用open/write/read等系统调用接口时,在内核层中调用file_operations里的open/write/read函数指针,而函数指针指向的drv_open/drv_read/drv_write等驱动层函数是由我们自己定义的。在驱动程序中,实现硬件的初始化,以及数据读写。
- 定义自己的
file_operations结构体。
前面本喵说过,file_operations结构体是由驱动程序提供的,而驱动程序又是我们写的,所以我们首先要做的就是定义自己的file_operations 结构体。
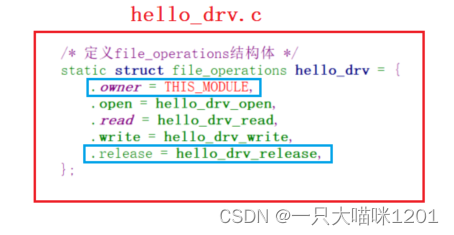
如上图所示,在hello_drv.c源文件中定义file_operations结构体变量,并且进行初始化,给函数指针赋值相应的函数。
owner:是一个指向模块所有者的指针,是必须设置的。
- gcc编译器中增加了使用
.结构体成员 = xxx来给成员变量赋值的语法。
- 实现对应的
drv_open/drv_read/drv_write等函数。

如上图所示驱动函数的定义,由于现在讲解的是框架,所以本喵在函数里没有写任何操作,只是使用printk打印一些调试信息。
- 内核中打印调试信息只能使用
printk,不能使用printf。- 使用命令行指令
dmesg就能看到日志中的调试信息。
- 确定主设备号,也可以让内核自己分配。
每一个字符设备都有一个主设备号,用于标识设备的类型或者设备驱动程序。不同类型的设备或不同的驱动程序会有不同的主设备号。例如,所有的串口设备可能共享一个主设备号,而所有的打印机设备可能又共享另一个不同的主设备号。
- 主设备号就像是一个类,可以用这个类定义出多个实例。
- 主设备号可以由我们自己决定,也可以将其设置为0,让内核自己分配。
建议让内核去分配主设备号,因为我们并不是很清楚有哪些主设备号,自己决定的是否已经被使用。
/* 确定主设备号 */
static int major = 0
定义一个全局变量major来表示主设备号,暂时先给它赋值为0。
- 把
file_operations结构体注册到内核。
暂时可以认为在内核中有一个chardevs[]数组,该数组中存放的是字符设备节点的主设备号,当使用某一类字符设备时,会从该数组中寻找对应设备的file_operations结构体对象。
所谓注册就是将我们自己的字符设备主设备号注册到这个数组中,使用register_chrdev函数来实现:
major = register_chrdev(0, "hello", &hello_drv);
- 第一个参数是主设备号,如果传入的是0,则返回内核自动分配的主设备号。
- 第二个参数是字符设备的名称,是一个字符串。
- 第三个参数是我们提供的
file_operations结构体指针。
调用该函数后,主设备号和file_operations以及设备名称就绑定在了一起,而且主设备号放入到了chardevs[]数组中。
- 定义入口函数,安装驱动程序时,就会去调用这个入口函数 。
将file_operations注册到内核中是由入口函数完成的,入口函数使用宏__init修饰:

如上图所示,在安装驱动程序的时候,内核会自动去调用这个hello_init函数,在该函数中完成:
-
注册
file_operations结构体到内核中,并得到主设备号。 -
创建设备信息类,使用
class_create实现,该类中包含内核需要的设备节点信息,更方便内核去创建节点。 -
创建设备节点,使用
device_create实现,此时在内核中会生成一个/dev/hello路径用来表示节点设备。
- 出口函数,卸载驱动程序时,就会去调用这个出口函数。
有入口函数就有出口函数,出口函数使用宏__exit来修饰:
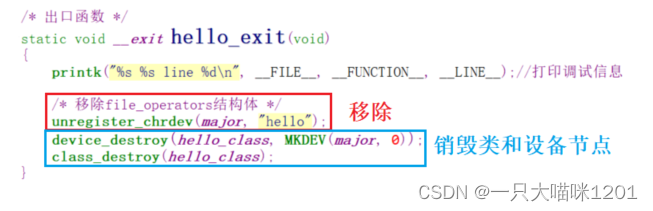
如上图所示函数,在卸载时会由内核自动调用,都要卸载了,就要将前面注册到内核中的字符设备移除,使用unregister_chrdev实现,并且将前面创建的字符设备类和设备节点都销毁,使用class_destroy和device_destroy实现。
- 完善设备信息
module_init(hello_init);
module_exit(hello_exit);MODULE_LICENSE("GPL");
使用module_init告诉内核hello_init函数是入口函数,使用module_exit告诉内核hello_exit是出口函数。
使用MODULE_LICENSE表明遵循GPL协议,否则是无法使用我们的驱动程序的。
至此已经实现了一个驱动程序框架,在命名上以hello为例,这个可以作为一个模板,在使用的时候只需要将hello改为相应的设备名字即可,然后再在我们自己实现的驱动函数中增加一些具体的代码。
⚽编程
下面用上面的框架来实现一个不涉及硬件操作的hello驱动程序:
- 命令行输入
./hello_drv_test -w abc,将abc字符串写入内核缓冲区中。 - 命令行输入
./hello_drv_test -r,从内核缓冲区中读出刚刚输入的字符串。
驱动层代码:
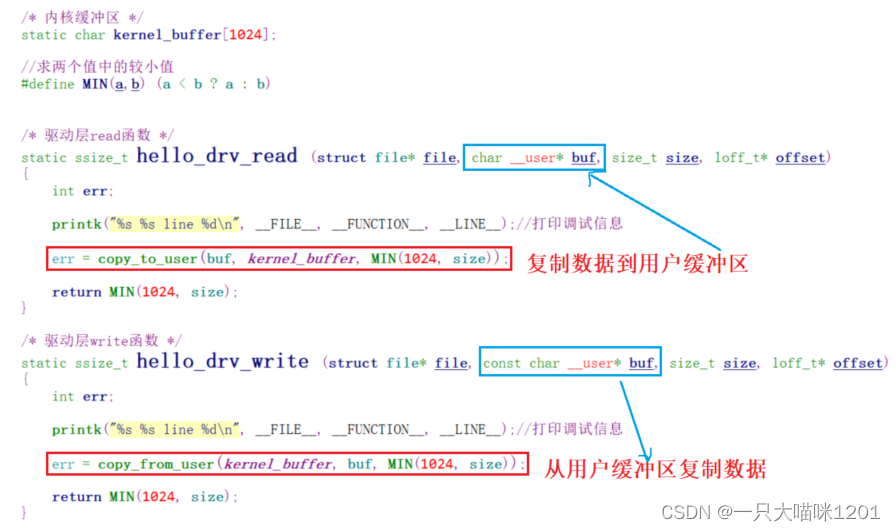
如上图所示代码,只需要实现file_operations结构体中的read和write方法,也就是对应的hello_drv_read和hello_drv_wite函数,其他的没有用到。
- 使用
__user修饰的buf,表示这是来自用户层的缓冲区。
用户层的缓冲区不能使用strcpy等应用层函数直接操作,而是必须要使用内核提供的复制函数:
copy_to_user:从内核缓冲区复制数据到用户缓冲区,第一个参数是目的buf,第二个参数是源kernel_buffer,第三个参数是要复制的字节数。copy_from_user:从用户缓冲区复制数据到内核缓冲区,参数参考上面。
由于定义的缓冲区大小是1024,防止越界,使用宏MIN将1024和用户层指定的数据大小size作比较,取较小值作为复制数据的大小。
应用层代码:
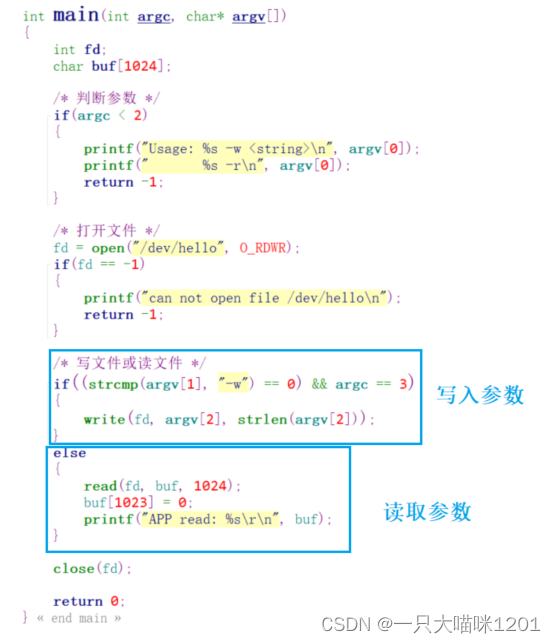
如上图所示,使用命令行参数传入-w,-r,以及要写入的字符串,在main函数中:
- 先打开
/dev/hello目录下的字符设备节点,在应用层看来,这就是一个普通文件。 - 根据命令行中的第二个参数判断:
-w:使用write将第三个参数的字符串写入到内核缓冲区中。-r:使用read将内核缓冲区的数据读出来。
这里应用层的wite最终会调用驱动层中的hello_drv_write,应用层的read最终会调用驱动层中的hello_drv_read。
交叉编译:
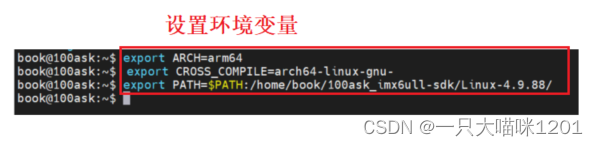
如上图所示,在命令行中输入上面的三条指令,设置环境变量,从而实现交叉编译环境的配置。
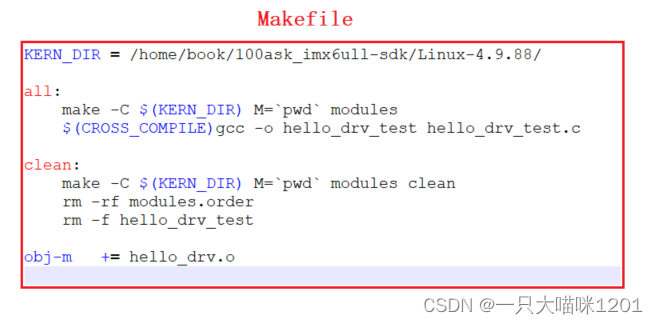
如上图所示,使用该Makefile文件来编译驱动文件hello_drv.c和应用层测试文件hello_drv_test.c,暂时不用这些指令是什么意思,直接用就星。
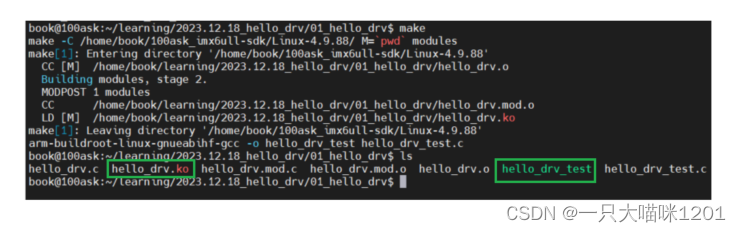
如上图所示,生成hello_drv.ko和hello_drv_test两个文件:
.ko后缀:表示这是一个内核模块,用于在运行时向内核动态添加功能,而不需要重新编译整个内核。
挂载根文件系统:

如上图,将生成的hello_drv.ko驱动模块文件和hello_drv_test测试可执行程序复制到nfs_rootfs文件下。

如上图所示,在IMX6ULL开发板上,通过串口工具执行mount -t nfs -o nolock,vers=3 192.168.5.11:/home/book/nfs_rootfs /mnt指令,将刚刚进行编译等操作的Linux服务器里的根文件系统挂载到开发版上。
nfs_rootfs是一个通过网络文件系统(NFS)挂载的根文件系统。- 网络文件系统(NFS):NFS 是一个分布式文件系统协议,它允许用户在网络上访问存储在远程计算机上的文件,就像访问本地存储的文件一样。
- 根文件系统(rootfs):根文件系统包含操作系统的核心组件,如可执行文件、库文件、配置文件等。
此时在开发板上就相当于有了一个Linux操作系统,实际上用的是服务器的系统,可以看到,服务器的根文件系统中有什么,挂载之后的/mnt里就有什么。
安装驱动程序:
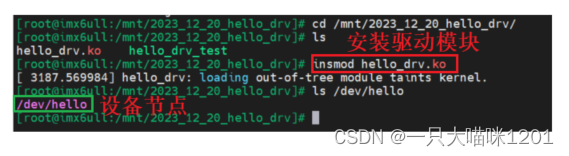
如上图所示,进入开发板挂载的根文件/mnt中,找到我们的hello_drv.ko所在位置,然后执行insmod hello_drv.ko指令安装设备节点的驱动程序,安装完毕后,在/dev设备节点中可以看到hello设备节点。
测试:

如上图所示,执行应用层测试程序hello_drv_test:
- 在执行可执行程序的命令行参数中使用
-w选项,写入A-Big-MiaoMi字符串到内核缓冲区中。 - 再使用
-r选项,从内核缓冲区中读取刚刚写入数据,结果是APP read: A-Big-MiaoMi。
根据上面测试结果,说明我们的第一个驱动程序就写成功了。
🏀LED驱动
⚽配置GPIO
配置GPIO通用步骤:
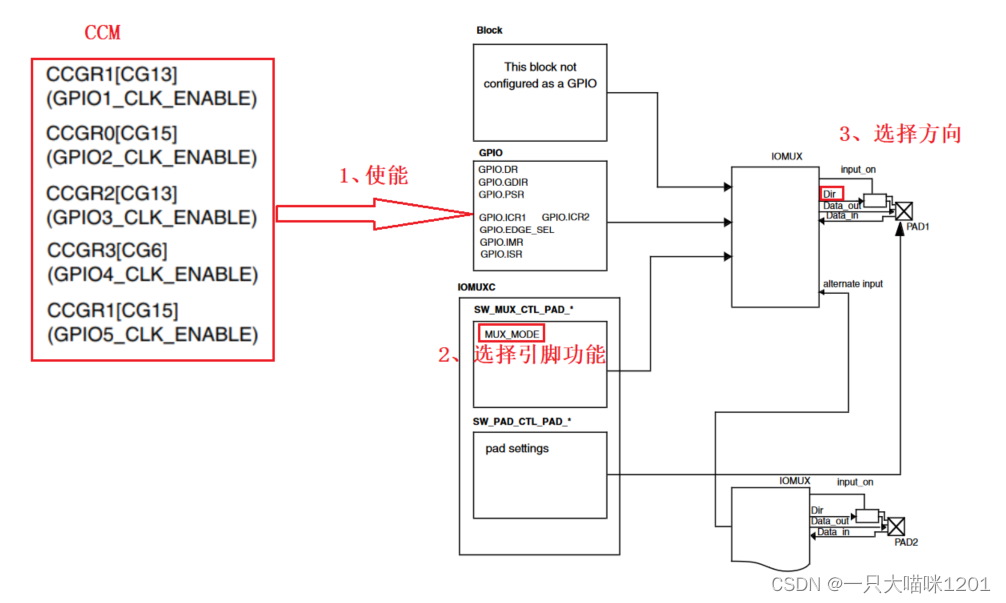
如上图所示IMX6ULLGPIO框图,输出功能的配置和其他芯片一样分为四步:
- 使能GPIO组:设置
CCM寄存器组中的CCGRx寄存器中的相应位CGx来使能对应的GPIO组。 - 选择GOIO为通用输入输出功能:设置
IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPERx寄存器中的MUX_MODE位将IO口设为通用输入输出功能。 - 选择方向:设置
GPIOx_GDIR中的相应位,0表示输入,1表示输出。 - 写数据寄存器:设置
GPIOx_DR中的相应位,0表示输出低电平,1表示输出高电平。
具体单板:

如上图所示本喵的IMX6ULL开饭上LED2的电路图:
GPIO5_3输出低电平,LED灯亮。GPIO5_3输出低电平,LED灯灭。
按照上面的配置步骤,寻找GPIO5_3的那几个寄存器和对应的比特位:
CCM_CCGR1中的CG15:

如上图所示,CCM_CCGR1中的CG15是保留的,在IMX6ULL中,GPIO5这组GPIO默认使能,所以不用设置。CCM_CCGR1的绝对地址是0x020C4000 + 0x6C = 0x020C406C。
IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3:

如上图所示,将 IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3寄存器中的MUX_MODE4位配置为101,选择GPIO5_IO03为通用输入输出模式。该寄存器的绝对地址是0x02290000 + 0x14 = 0x02290014。
GPIO5_GDIR:
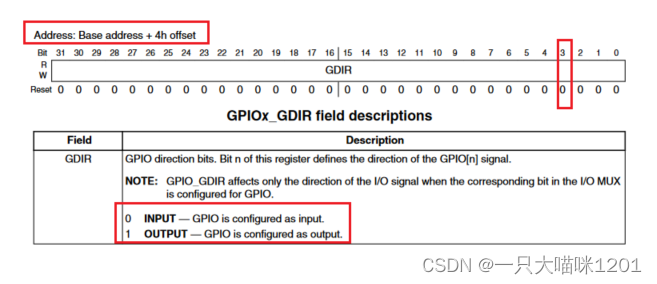
如上图,使用的是GPIO5_3IO口,所以要配置GPIO5_GDIR中的bit3,该位为1,表示输出,该位为0,表示输入。该寄存器的偏移量是0x4。
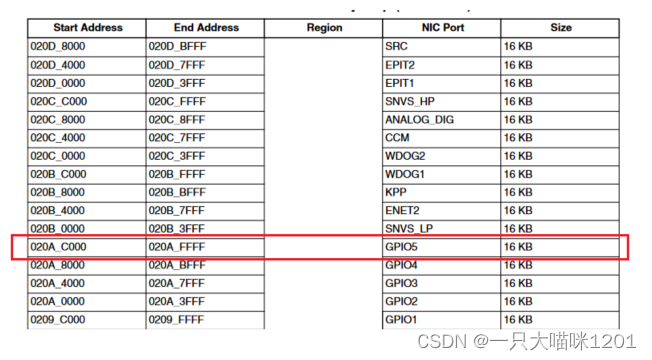
如上图所示,GPIO5的基地址是0x020AC000,所以GPIO5_GDIR的绝对地址是0x020AC000 + 0x4 = 0x020AC004。
GPIO5_DR:
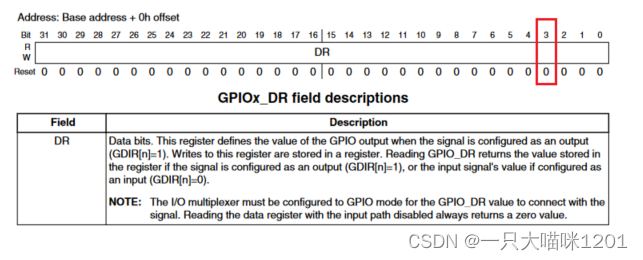
如上图所示,GPIO5_DR中的bit3设置为1,GPIO5_3就输出高电平,设置为0就输出低电平,该寄存器的地址偏移量是0x0,所以它的绝对地址就是0x020AC000 + 0x0 = 0x020AC000。
⚽编程
驱动程序
按照驱动程序框架来编写:
1. 提供file_operations并实现相应驱动函数:
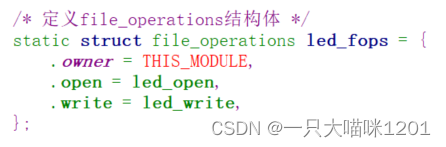
如上图所示file_operations结构体,只初始化三个成员:
-
owner是必须有的,其值是该模块所属者的指针THIS_MODULE。 -
open初始化为led_open:
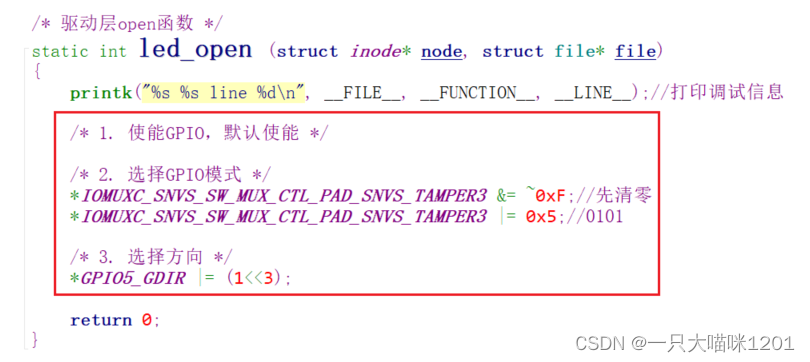
如上图所示,在led_open函数中,对GPIO5_3进行使能,功能选择以及方向选择,当应用层调用open系统调用时,最终会调用驱动层的led_open函数,对GPIO进行初始化。 -
write初始化为led_write:
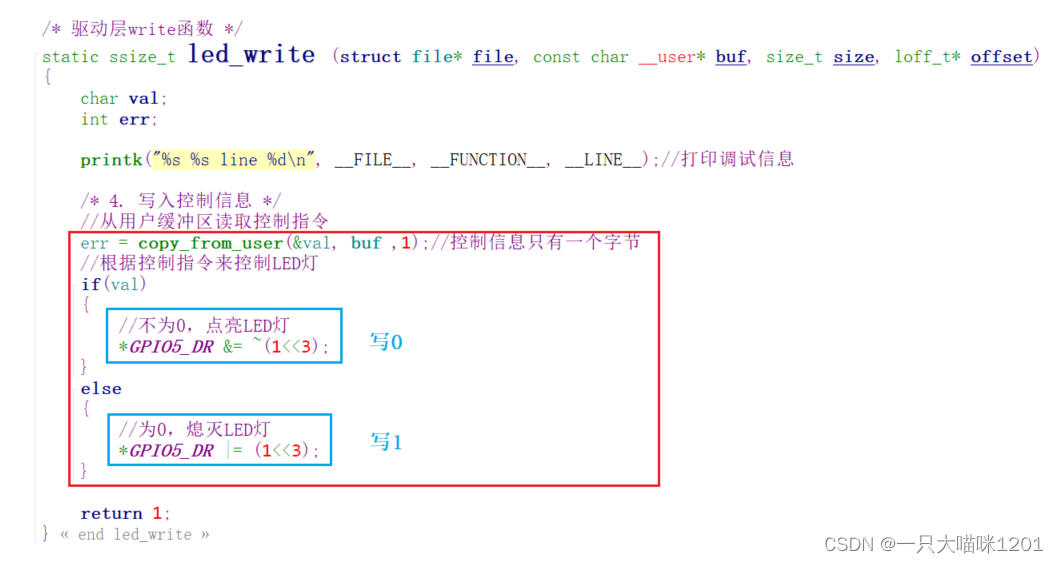
如山图所示,在led_write函数中,使用copy_from_user读取应用层调用write系统调用时写入的参数,并且复制到val中,根据该参数的逻辑值来控制LED灯的状态:
- 用户层写入非0值:向
GPIO5_DR寄存器的bit3写0,LED灯亮。 - 用户层写入0值:向
GPIO5_DR寄存器的bit3写1,LED灯灭。
2. 实现入口函数并注册设备节点:

如上图所示,创建相应寄存器的指针变量,然后在入口函数中首先使用resister_chrdev注册设备节点,然后再使用ioremap函数映射虚拟地址。然后再使用class_create和device_create为内核创建设备节点提供信息。
- 用来指向寄存器的指针使用
volatile关键字修饰,保持内存可见性。- 对于寄存器来说,有没有数据写入区别非常大,所以要保证每次操作寄存器都能写入,不被优化。
映射虚拟地址
前面查芯片手册时看到的寄存器地址是实实在在的物理地址,但是在Linux中是不允许直接操作物理地址的。
在led_open和led_write中操作寄存器时使用的指针IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3,GPIO5_GDIR,以及GPIO5_DR变量,其中的地址都是经过映射以后得到的虚拟地址。

如上图所示,在Linux系统中存在多个进程,假设此时存在两个进程,每个进程都有一个PCB结构体,里面的struct mm_struct* mm指向各自进程地址空间(也叫虚拟地址空间)。
- 不同进程的进程地址空间是相互独立的,互不影响。
- 每个进程地址空间都包含栈区,共享区,堆区,数据段,代码段等等区域。
在led_open和led_write驱动函数中使用的寄存器指针,它们属于全局变量,所以存放在使用该驱动程序进程地址空间的数据段。
如果这两个进程都会调用open和write系统调用来操作LED灯:
- 假设进程地址空间的数据段存放的是
GPIO5相关寄存器的物理地址。
进程1对GPIO5_3IO口的操作是正常的,符合规范的,但是进程2对GPIO5_3IO口的操作是违规的,如越界操作,溢出等错误操作。
由于进程1和进程2操作的是物理地址,所以进程2的错误操作会影响到进程1的正常操作,两个进程就相互影响了。
- 进程地址空间的数据段存放的是
GPIO5相关寄存器的映射后的虚拟地址。
实际上采样的就是这种方式,使用虚拟地址的方式来管理和保护内存。上图中的MMU可以把物理地址和虚拟地址建立映射关系,当操作进程地址空间中的虚拟地址时:
- MMU会先判断该操作是否合法,对物理地址形成保护,防止非法访问。
- 操作合法时,去该虚拟地址所映射的物理地址处进行操作。
此时进程1和进程2就不会互相影响,当进程2对寄存器进程非法操作时,MMU就会直接驳回它的操作请求。
- 操作系统Linux运行在保护模式下,使用虚拟内存来管理和保护内存,同一个物理地址可以被映射到不同进程的不同虚拟地址上。
- 直接访问物理地址会绕过这层保护,可能导致系统不稳定或不安全。
使用ioremap进行虚拟地址映射时:
- 第一个参数:要进行映射的物理地址。
- 第二个参数:要映射的内存大小(字节)。
由于IMX6ULL的GPIO5_3涉及到的寄存器都是32位的,也就是四个字节,所以第二个参数都是4,将使用ioremap映射后的3个虚拟地址赋值给那几个寄存器指针全局变量。
- 虽然映射的大小是4个字节,但是映射时是以 页(4KB) 为单位的,所以真正映射出来的虚拟地址大小是4KB。
3. 实现出口函数和完善驱动信息:
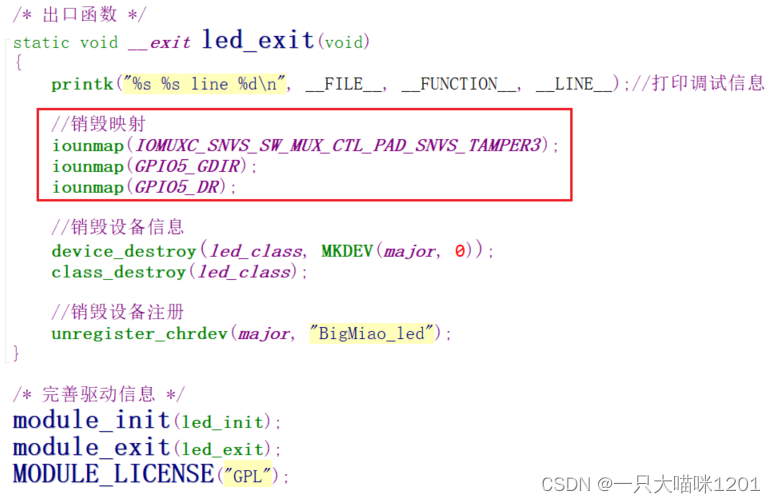
如上图所示,在出口函数中,首先要把映射的虚拟地址销毁掉,使用iounmap函数实现,只有一个参数就是映射后得到的虚拟地址。
然后就是按照驱动框架中的操作,将设备类以及设备节点全部销毁,以及销毁设备节点的注册,最后再告诉内核入口函数和出口函数,以及声明一下使用GPL开源协议。
应用层
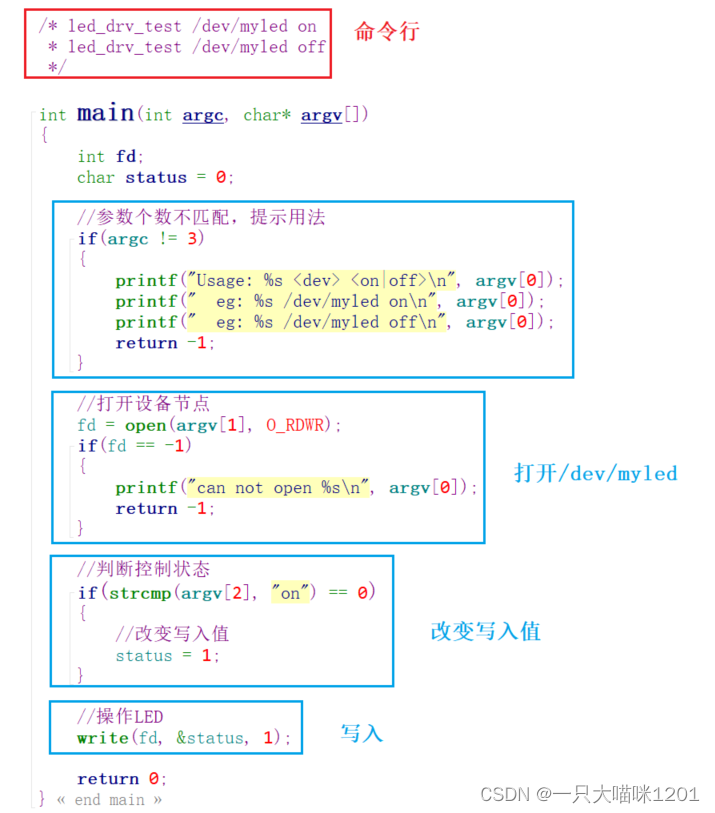
如上图所示应用层的测试代码led_drv_test.c,在执行测试程序时,命令行中输入的指令有两种:
led_drv_test /dev/myled on:表示点亮LED灯。led_drv_test /dev/myled off:表示熄灭LED灯。
在main函数中,首先判断命令行参数的个数,如果个数不为3,说明使用错误,则提示用法并直接返回-1。
参数正确以后,先打开/dev/myled目录下的设备节点,可以看到,使用的是open系统调用,应用层只把它当作一个普通文件,并不知道这是一个字符设备。
根据命令行参数中的最后一个进行判断:
- 如果是
“on”:则将后面要写入内核中的数据status修改为1。 - 如果是
"off":则不做任何修改,status使用创建时的初始值0。
最后使用write系统调用,将status这一个字节的数据写入到内核,驱动函数根据这个数据的逻辑值来判断是点亮LED灯还是熄灭LED灯。
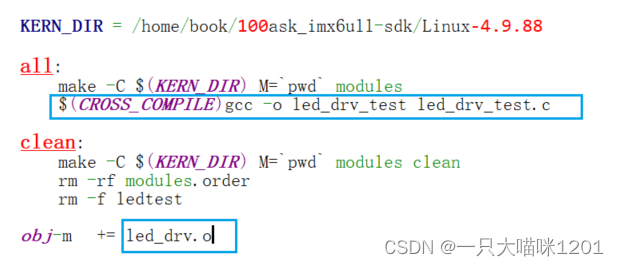
交叉编译和前面hello驱动程序一样,只是需要对Makefile文件稍作修改:
最后在IMX6ULL上挂载的跟文件系统中使用insmod led_drv.ko按照myled设备节点,然后执行led_drv_test测试程序就可以点亮和熄灭LED灯了,这里本喵就不贴板子的效果图了。
🏀总结
通过和硬件无关的hello驱动程序来引出驱动程序的框架。然后使用该框架实现了IMX6ULL单板上LED灯的驱动程序。
相关文章:
【Linux驱动】最基本的驱动框架 | LED驱动
🐱作者:一只大喵咪1201 🐱专栏:《Linux驱动》 🔥格言:你只管努力,剩下的交给时间! 目录 🏀最基本的驱动框架⚽驱动程序框架⚽编程 🏀LED驱动⚽配置GPIO⚽编程…...

前端---表单提交
1. 表单属性设置 <form>标签 表示表单标签,定义整体的表单区域 action属性 设置表单数据提交地址method属性 设置表单提交的方式,一般有“GET”方式和“POST”方式, 不区分大小写 2. 表单元素属性设置 name属性 设置表单元素的名称,…...

[C#]Parallel使用
一、 Parallel的使用 1、Parallel.Invoke2、Parallel.For3、Parallel.Foreach二、 Parallel中途退出循环和异常处理 1、当我们使用到Parallel,必然是处理一些比较耗时的操作,当然也很耗CPU和内存,如果我们中途向停止,怎么办呢&…...

docker container 指定gpu设备
1, 在yaml中 Turn on GPU access with Docker Compose | Docker Docs Example of a Compose file for running a service with access to 1 GPU device: services:test:image: nvidia/cuda:12.3.1-base-ubuntu20.04command: nvidia-smideploy:resources:reserva…...

时间Date
你有没有思考过时间问题: 前端为什么可以直接看见时间格式的数据 后端怎么接受的数据,怎么处理的 一般来说:前端传输来数据都是时间格式的字符串,那么后端需要能够解析时间格式的字符串,归功于JSONFormat ,可以解析…...

前端---css 选择器
1. css 选择器的定义 css 选择器是用来选择标签的,选出来以后给标签加样式。 2. css 选择器的种类 标签选择器类选择器层级选择器(后代选择器)id选择器组选择器伪类选择器 3. 标签选择器 根据标签来选择标签,以标签开头,此种选择器影响范…...

【MybatisPlus快速入门】(2)SpringBoot整合MybatisPlus 之 标准数据层开发 代码示例
目录 1 标准CRUD使用2 新增3 删除4 修改5 根据ID查询6 查询所有7 MyBatis-Plus CRUD总结 之前我们已学习MyBatisPlus在代码示例与MyBatisPlus的简介,在这一节中我们重点学习的是数据层标准的CRUD(增删改查)的实现与分页功能。代码比较多,我们一个个来学习…...

如何将自建的ElasticSearch注册成一个服务
ES 服务管理 注册ES服务 创建一个 Elasticsearch 服务配置文件。 sudo vim /etc/systemd/system/elasticsearch.service 将以下内容复制到 elasticsearch.service 文件中: [Unit] Descriptionelasticsearch Afternetwork.target[Service] Typeforking Useresa…...

360勒索病毒:了解最新变种.360,以及如何保护您的数据
导言: 随着科技的飞速发展,网络安全威胁也在不断演变,.360 勒索病毒成为近期备受关注的一种恶意软件。本文91数据恢复将介绍如何恢复被.360 勒索病毒加密的数据文件,并提供一些建议,帮助你预防这种威胁。 如果您在面对…...

vue使用ElementUI搭建精美页面入门
ElementUI简直是css学得不好的同学的福音 ElementUI官网: Element - The worlds most popular Vue UI framework 安装 在vue文件下,用这个命令去安装Element UI。 npm i element-ui -S step1\先切换到vue的目录下去,注意这里面的WARN不是…...

【C->Cpp】深度解析#由C迈向Cpp(2)
目录 (一)缺省参数 全缺省参数 半缺省参数 缺省参数只能在函数的声明中出现: 小结: (二)函数重载 函数重载的定义 三种重载 在上一篇中,我们从第一个Cpp程序为切入,讲解了Cpp的…...

WPS中如何根据身份证号生成出生日期并排序
1. wps中如何根据身份证号导出出生日期并排序 1.1 wps中建一张表 1.2 使用转日期格式导出出生日期 DATE(VALUE(MID(C2,7,4)),VALUE(MID(C2,11,2)),VALUE(MID(C2,13,2)))MID(C2, 7, 4):这部分从单元格 C2 中提取文本字符串,从第7个字符开始提取长度为4的…...
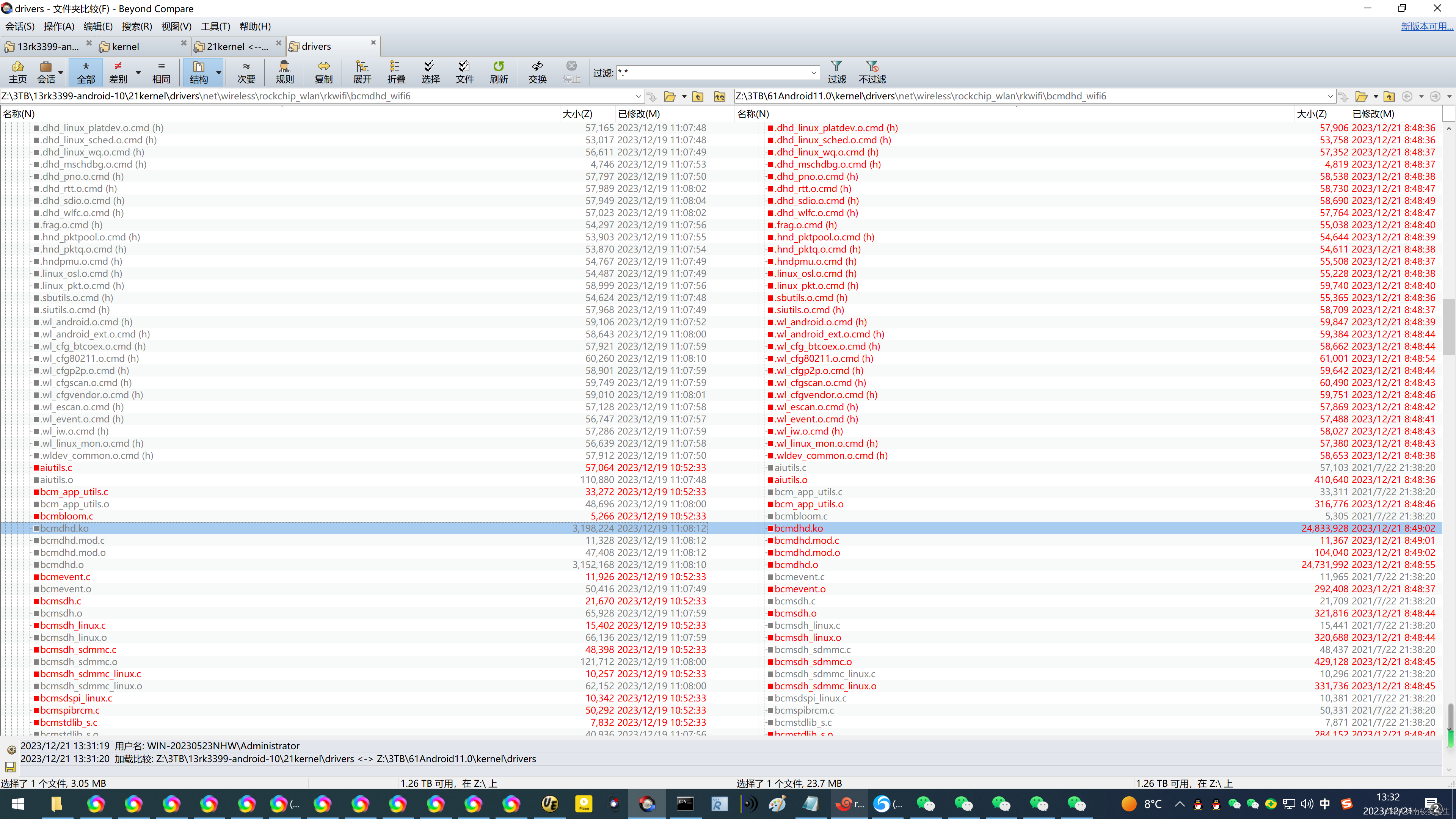
20231222给NanoPC-T4(RK3399)开发板的适配Android11的挖掘机方案并跑通AP6398SV
20231222给NanoPC-T4(RK3399)开发板的适配Android11的挖掘机方案并跑通AP6398SV 2023/12/22 7:54 简略步骤:rootrootrootroot-X99-Turbo:~/3TB$ cat Android11.0.tar.bz2.a* > Android11.0.tar.bz2 rootrootrootroot-X99-Turbo:~/3TB$ tar jxvf Android11.0.tar.…...

iClient for JavaScript如何以mvt矢量瓦片的形式加载数据服务
刘大 这里写目录标题 前言1.iServer中的预览页面2.iClient for JavaScript加载2.1 构建Style2.2 iCient加载2.2.1Leaflet & MapboxGL2.2.2 OpenLayers 前言 在提到查看iServer REST数据服务的概况的时候,大家总会想到说,通过发布对应的地图服务或者…...
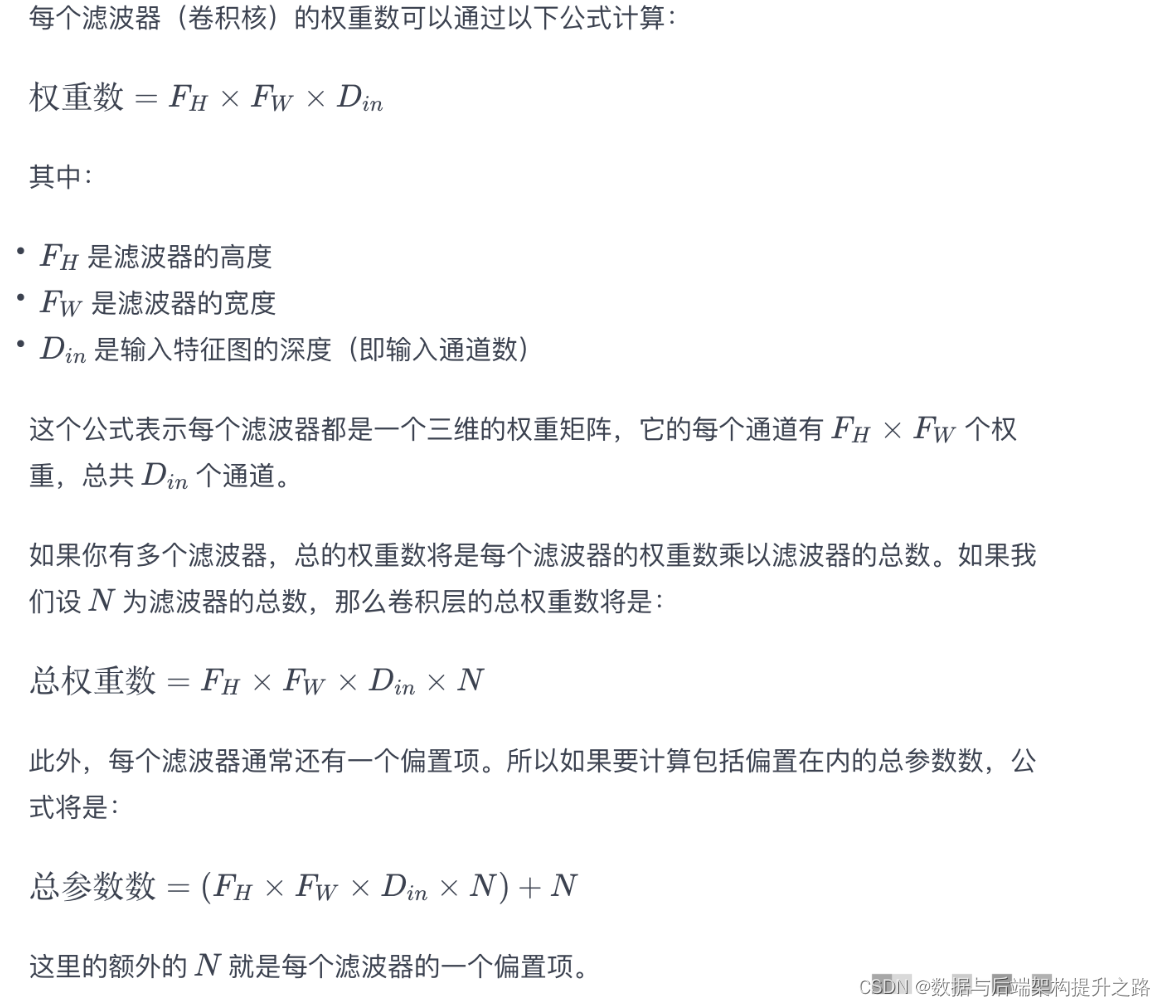
全方位掌握卷积神经网络:理解原理 优化实践应用
计算机视觉CV的发展 检测任务 分类与检索 超分辨率重构 医学任务 无人驾驶 整体网络架构 卷积层和激活函数(ReLU)的组合是网络的核心组成部分 激活函数(ReLU) 引入非线性,增强网络的表达能力。 卷积层 负责特征提取 池化层…...
视频批量处理:随机分割方法,创新剪辑方式
随着数字媒体技术的飞速发展,视频处理已是日常生活和工作中不可或缺的一部分。在处理大量视频时,要一种高效、自动化的方法来满足需求。现在一起来看云炫AI智剪如何批量随机分割视频的批量处理方法,给视频剪辑工作带来创新。 视频随机分割4段…...
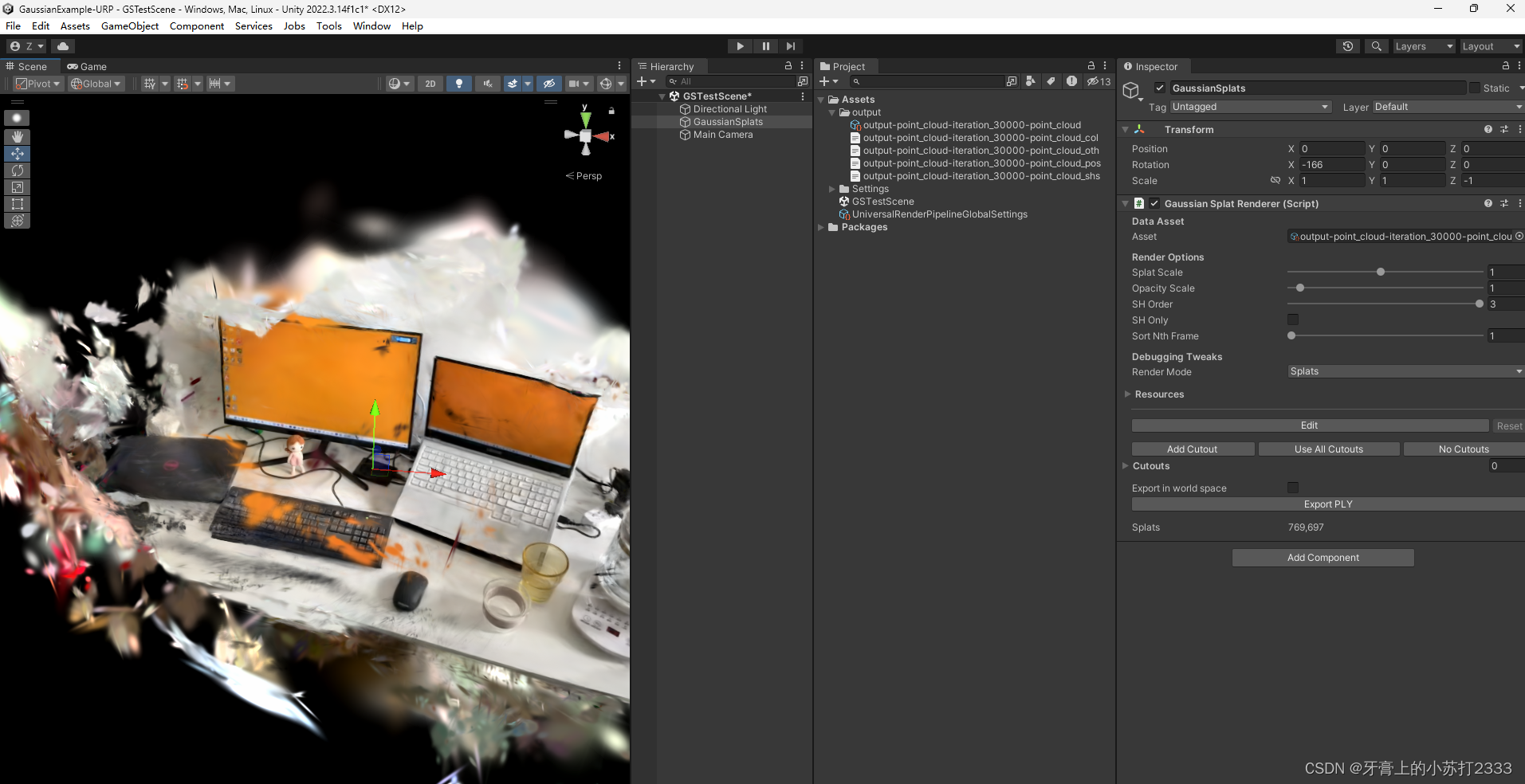
Gaussian-Splatting 训练并导入Unity中
这个周末玩点啥~🐞 🍥环境安装💡安装C编译工具💡安装Python💡安装CUDA💡添加ffmpeg到环境变量Path添加COLMAP-3.8-windows-cuda文件路径到环境变量Path💡pytorch安装💡tqdm 安装&…...
账号和权限管理
目录 一、用户账号和的概述 (一)用户类别 (二)组账号 编辑(三)UID号 编辑(四)GID号 (五)配置文件 二、用户账号管理 (一)…...

前端---表单标签
1. 表单的介绍 表单用于搜集不同类型的用户输入(用户输入的数据),然后可以把用户数据提交到web服务器 。 2. 表单相关标签的使用 <form>标签 表示表单标签,定义整体的表单区域 <label>标签 表示表单元素的文字标注标签,定义文字…...

Matplotlib 绘制基本的图表
# 导入包 import pandas as pd import numpy as np import matplotlib.pyplot as plt plt.rcParams[font.sans-serif][SimHei] # 用来显示中文 plt.rcParams[axes.unicode_minus] False # 显示负坐标轴# 读取源数据,后续大部分数据基于词文件的数据,需…...

2026年企业AI落地新趋势!RAG知识库实战指南:环境搭建到生产部署全解析
本文介绍了RAG(检索增强生成)技术在企业知识库中的应用,通过从环境搭建到生产部署的完整实战指南,阐述如何利用RAG提升大语言模型回答的准确性、可追溯性和时效性。文章涵盖了基础环境配置、技术选型、数据准备、知识库构建、RAG系…...

Legba性能优化技巧:10个实用方法提升暴力破解效率 [特殊字符]
Legba性能优化技巧:10个实用方法提升暴力破解效率 🚀 【免费下载链接】legba The fastest and more comprehensive multiprotocol credentials bruteforcer / password sprayer and enumerator. 🥷 项目地址: https://gitcode.com/gh_mirro…...
)
计算机毕业设计 | SpringBoot+vue医院药品管理系统(附源码+论文)
1,绪论 1.1课题背景 身处网络时代,随着网络系统体系发展的不断成熟和完善,人们的生活也随之发生了很大的变化。目前,人们在追求较高物质生活的同时,也在想着如何使自身的精神内涵得到提升,而读书就是人们…...

纤维增强复合材料神经协同优化技术解析
1. 纤维增强复合材料协同优化技术概述纤维增强复合材料因其优异的比强度和比刚度特性,在航空航天、汽车制造等领域得到广泛应用。传统设计方法通常将结构拓扑优化与制造工艺规划分离处理,导致优化结果难以实际制造或性能大幅下降。我们提出的神经协同优化…...

终极文档下载指南:如何用kill-doc一键拯救30+平台的文档资源
终极文档下载指南:如何用kill-doc一键拯救30平台的文档资源 【免费下载链接】kill-doc 看到经常有小伙伴们需要下载一些免费文档,但是相关网站浏览体验不好各种广告,各种登录验证,需要很多步骤才能下载文档,该脚本就是…...

注塑行业的数智化突围:告别“黑盒”生产,拥抱透明化管理新纪元
在从“经验驱动”向“数据驱动”的关键跃迁中,注塑成型作为典型的离散制造环节,其数字化转型的痛点尤为尖锐。盘古信息基于近二十年的行业深耕,依托其自主研发的IMS工软底座,为注塑行业带来了一套完整的数智化破局方案,…...

干货合集:2026最新AI论文软件测评与推荐大全
2026年真正好用的AI论文软件,核心看生成的论文质量、低AI味、格式正确、学术适配四大指标。综合实测,千笔AI、ThouPen、豆包、DeepSeek、Grammarly 是当前最值得推荐的梯队,覆盖从免费到付费、从中文到英文、从文科到理工的全场景需求。 一、…...

Kimi LeetCode 2547. 拆分数组的最小代价 C++实现
这道题的核心思路是动态规划 记忆化搜索。我们定义 dfs(i) 为从下标 i 开始拆分数组的最小代价,答案即为 dfs(0)。关键观察子数组的重要性 k trimmed(subarray).length。其中 trimmed 操作会移除子数组中只出现一次的数字。如果我们用 cnt[x] 记录数字 x 在当前子…...

0 基础跨行斩获月薪 10k 实力远不及破局魄力
人生如同奔涌的比特流,暗礁与漩涡总在不经意间出现。 当挑战如恶意攻击般袭来,切莫因一时受阻而缴械投降。 那些在代码与协议中鏖战的日夜终将铸就铠甲,正如防火墙抵御入侵守护核心,只要目标坚定持续精进,终将在攻防…...

SeekStorm入门指南:5分钟构建你的第一个高性能搜索引擎
SeekStorm入门指南:5分钟构建你的第一个高性能搜索引擎 【免费下载链接】SeekStorm SeekStorm: vector & lexical search - in-process library & multi-tenancy server, in Rust. 项目地址: https://gitcode.com/gh_mirrors/se/SeekStorm 想要快速构…...