搬运机器人RFID传感器CNS-RFID-01|1S的RS485(MODBUS|HS协议)通讯连接方法
搬运机器人RFID传感器CNS-RFID-01|1S支持RS485通信,可支持RS485(MODBUS RTU)协议、RS485-HS协议,广泛应用于物流仓储,立库 AGV|无人叉车|搬送机器人等领域,常用定位、驻车等,本篇重点介绍CNS-RFID-01|1S RFID传感器的RS485通信连接方法。

1、RS485连接方法
用线缆将上位机与CNS-RFID-01|1S传感器进行以下的连接

2、通信设置
使用 RS485 通信分为两种协议,分别为 moudbus 协议和 HS 协议, 在确定所需要使用的协议后,需要先对 CNS-RFID-01/1S 进行设定后 再使用。 由于无法直接使用 RS485 对设备进行参数设定,需要通过电脑端 Hinson 配置软件进行参数配置。
具体配置连接见"配置参数",如下:


3、以 MOUDBUS 协议控制
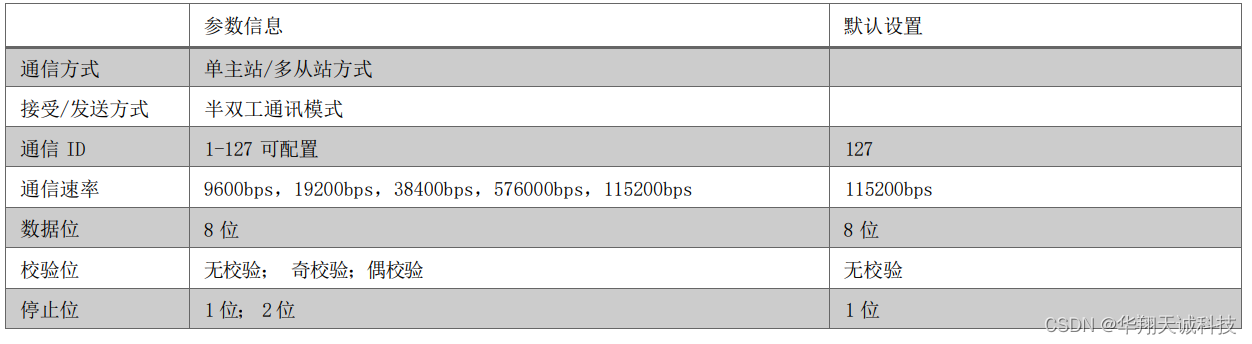
3.1 通讯规格

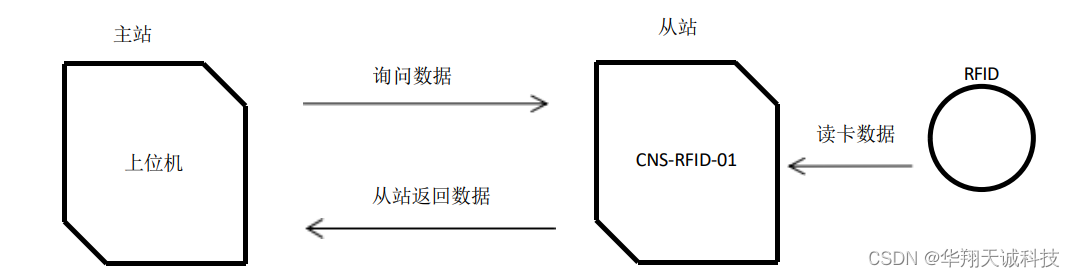
3.2 主从站通讯时序
Modbus 协议的通讯方式是单主站/多从站方式, 主站对 1 台从站传送询问, 从站执行处理,回复响应。

3.3 信息
3.3.1、信息格式

3.3.2、询问信息结构

●从站地址
指定的从站地址,通过配置软件配置后的从站传感器地址。
●功能码
传感器支持的功能码信息的长度如下表。

●资料
与设定功能码相关的资料
3.3.3、回应信息结构
从站接受到询问信息后,有是三种回应状态,分别是,正常回应,无回应和异常回应。 回应的信息结构和询问的信息结构一样。

●正常回应
从主站接收询问之后, 从站会执行要求的处理,回复响应。
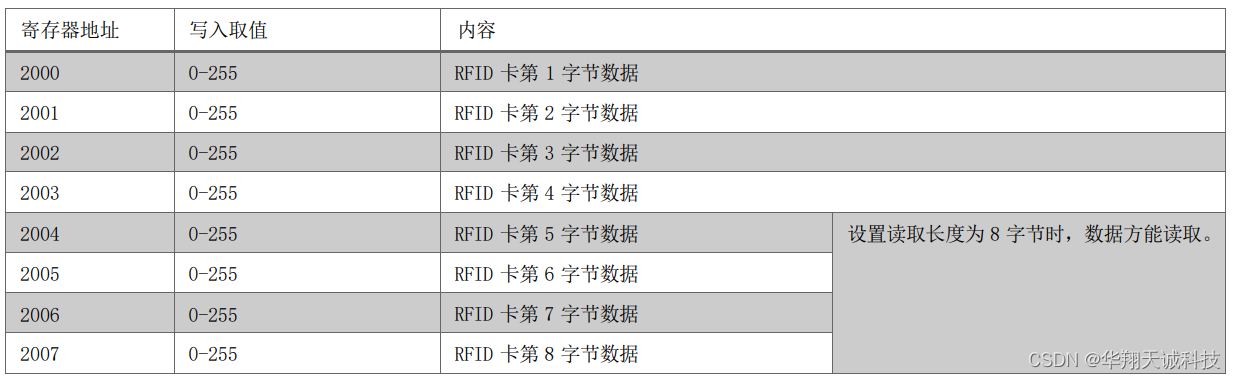
3.4 寄存器地址
写多个寄存器 写卡操作(16)
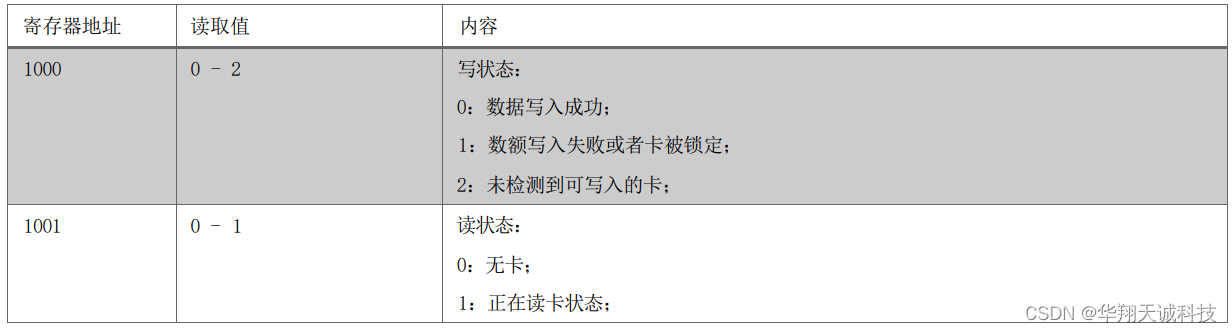
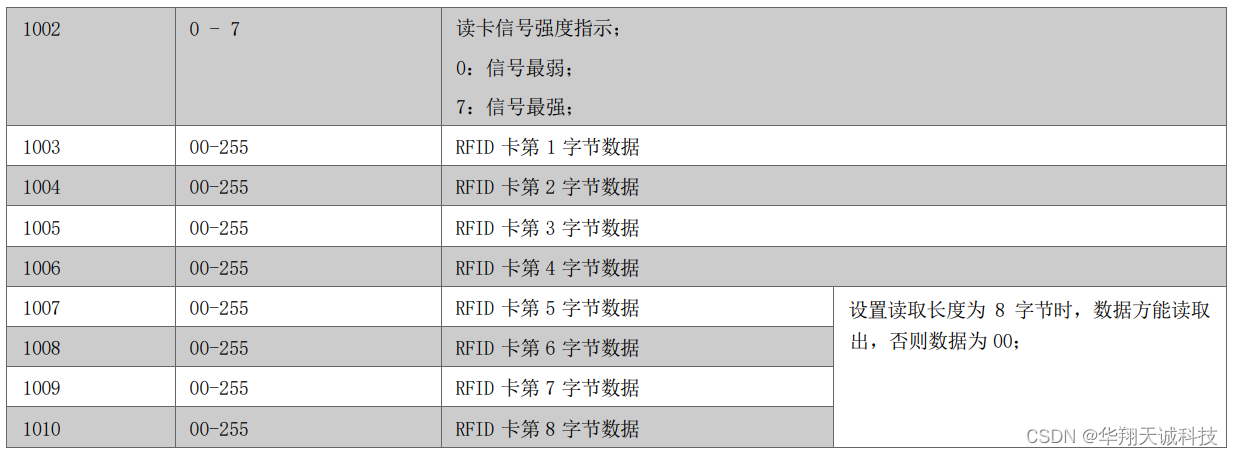
读输入寄存器(04)
RFID 传感器会自动记录保存最近一次读卡的数据, 以便上位机能够随时能够确定地标。
4、 以 HS 协议通讯
4.1 通讯规格
4.2 通讯协议
上位机可以对卡进行读写卡操作, 通信协议包括两部分, 读取卡数据和写入卡数据, 下面就对两种操作协议进行详细说明;
4.2.1、读取卡数据协议
4.2.1.1、读卡操作数据流程
4.2.1.2、主站询问数据
询问读卡数据格式

●标识位(5Byte)
0x52 0x43 0x6f 0x64 0x65
●通讯标识位(1Byte)
从站 RFID 传感器地址,范围在 0x01-0x7F;
●校验码(2Byte)
CRC16 的运算后的结果。详情请查看校验码计算式。
4.2.1.3、从站返回数据
RFID 传感器处于询问模式返回数据


●标识位(5Byte)
0x52 0x43 0x6f 0x64 0x65
●通讯标识位(1Byte)
从站 RFID 传感器地址,范围在 0x01-0x7F;
●读卡状态(1Byte)
0x00:RFID 传感器非读卡状态; 0x01:RFID 传感器正在读卡状态;
●卡信号强度(1Byte)
0x00-0x07:读取到卡信号强度, 0x00 信号强度最弱,0x07 信号强度为最强;
●卡数据(8Byte)
RFID 传感器会自动记录保存最近一次读卡的数据, 以便上位机能够随时能够确定地标。 设置读取数据长度为 4Byte 时:前 4Byte 为卡内有效数据, 后 4 字节的为无效数据 0x00; 设置读取数据长度为 8Byte 时: 8Byte 数据全部有效;
●校验码(2Byte)
CRC16 的运算后的结果。详情请查看校验码计算式。
4.2.2、写卡数据协议
4.2.2.1、写卡操作数据流程

4.2.2.2、主站发送数据
写入卡数据格式
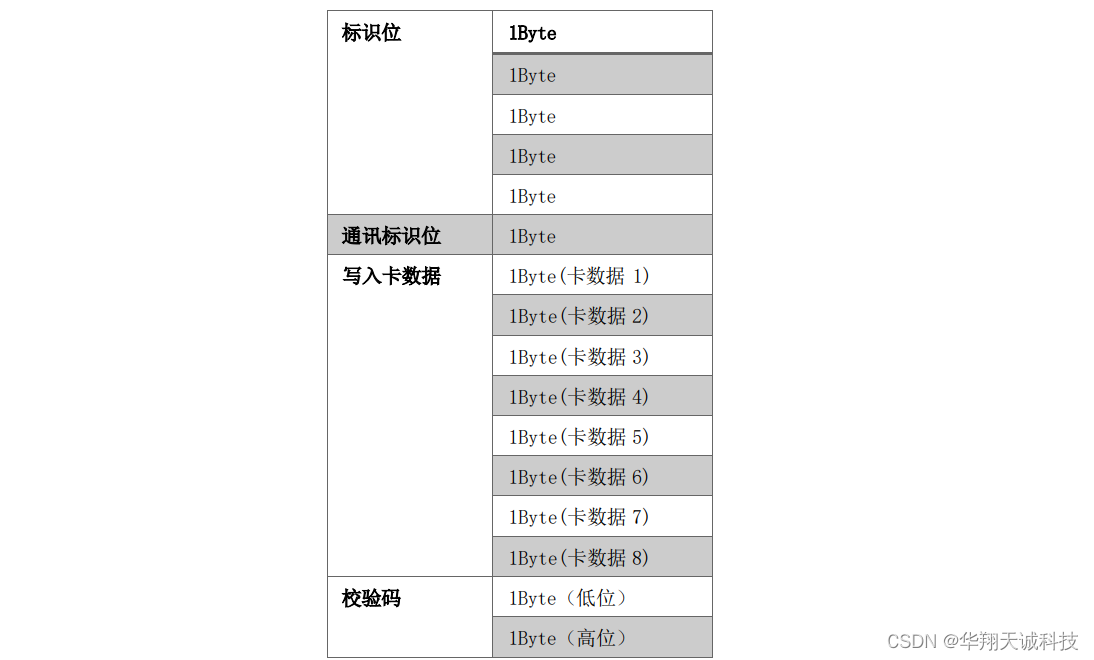
●标识位(5Byte)
0x57 0x43 0x6f 0x64 0x65
●通讯标识位(1Byte)
从站 RFID 传感器地址,范围在 0x01-0x7F;
●卡数据(8Byte)
设置读取数据长度为 4Byte 时:前 4Byte 为卡内有效数据, 后 4 字节的为无效数据 0x00; 设置读取数据长度为 8Byte 时: 8Byte 数据全部有效;
●校验码(2Byte)
CRC16 的运算后的结果。详情请查看校验码计算式。
4.2.2.3、从站返回数据
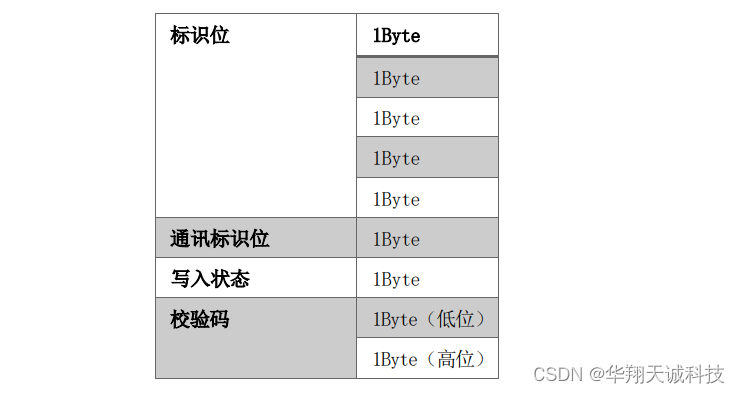
●标识位(5Byte)
0x57 0x43 0x6f 0x64 0x65
●通讯标识位(1Byte)
从站 RFID 传感器地址,范围在 0x01-0x7F;
●写入状态(1Byte)
14 0x00:写入成功; 0x01:写入错误或者卡内部被锁定; 0x02:未检测到可以写入的卡;
●校验码(2Byte)
CRC16 的运算后的结果。详情请查看校验码计算式。
更多关于搬运机器人RFID传感器CNS-RFID-01|1S的RS485(MODBUS|HS协议)通讯连接方法,华翔天诚科技欢迎您的咨询与交流!
相关文章:
搬运机器人RFID传感器CNS-RFID-01|1S的RS485(MODBUS|HS协议)通讯连接方法
搬运机器人RFID传感器CNS-RFID-01|1S支持RS485通信,可支持RS485(MODBUS RTU)协议、RS485-HS协议,广泛应用于物流仓储,立库 AGV|无人叉车|搬送机器人等领域,常用定位、驻车等,本篇重点介绍CNS-RF…...

使用ZMQ.proxy实现ZMQ PUB消息转发
MQ.proxy 是 ZeroMQ 库中的一个功能,用于创建一个简单的代理服务器。它可以将消息从一个套接字传递到另一个套接字,实现消息的转发和路由。 要使用 ZMQ.proxy,需要按照以下步骤进行操作: 创建两个 ZMQ.Socket 对象:一个…...
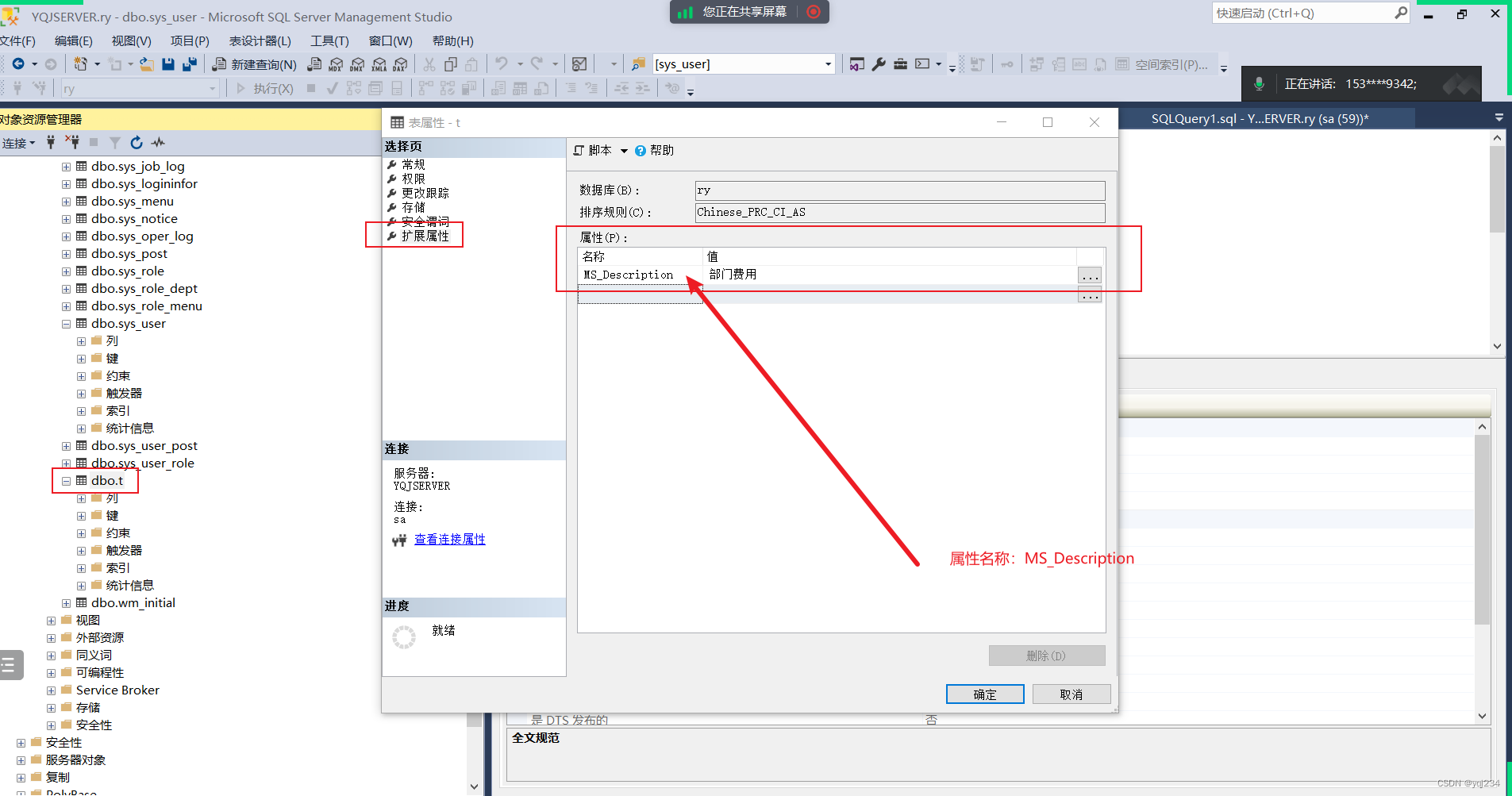
若依SQL Server开发使用教程
1. sys_menu表中的将菜单ID修改为自动ID,解决不能增加菜单的问题,操作流程如下: 解决方案如下 菜单栏->工具->选项 点击设计器,去掉阻止保存要求更新创建表的更改选项,点确认既可以保存了 2 自动生成代码找不表的解决方案…...

Mysql5.7服务器选项、系统变量和状态变量参考
官网地址:MySQL :: MySQL 5.7 Reference Manual :: 5.1.3 Server Option, System Variable, and Status Variable Reference 欢迎关注留言,我是收集整理小能手,工具翻译,仅供参考,笔芯笔芯. MySQL 5.7 参考手册 / ..…...

【Qt-Qss-Style】
Qt编程指南 ■ Qss■ Style■ setStyleSheet ■ style.qss■ border■ 去除弹框背景圆角■ QProgressBar样式表 ■ Qss Qt 支持很多种常见 符号 “>”代表直属子部件,说明两个控件之间是父子关系。 “#”代表后面的字段是前面控件类型的名称,当然也可…...

基于yolov8,制作停车位计数器(附源码)
大家好,YOLO(You Only Look Once) 是由Joseph Redmon和Ali开发的一种对象检测和图像分割模型。 YOLO的第一个版本于2015年发布,由于其高速度和准确性,瞬间得到了广大AI爱好者的喜爱。 Ultralytics YOLOv8则是一款前沿、最先进(SOTA)的模型&a…...
)
C++设计模式:单例模式(饿汉式、懒汉式)
单例模式是什么? 单例模式是一种创建型的软件设计模式。通过单例模式的设计,使得创建的类在当前进程中只有唯一一个实例,并提供一个全局性的访问点,这样可以规避因频繁创建对象而导致的内存飙升情况。 单例模式有三个要点 私有化…...
Django 访问前端页面一直在转异常:ReferenceError:axios is not defined
访问:http://127.0.0.1:8080/ my.html 一、异常: 二、原因 提示:axios找不到!! 查看代码<script src"https://unpkg.com/axios/dist/axios.min.js"></script>无法访问到官网 三、解决 Using j…...

C语言中关于指针的理解
#include <stdio.h> int main() {int a11;int *p&a; //因为a是整型的,所以我们定义指针p的时候要和a的类型一样char b;char *pa&b; //同理,b是字符型,所以这里的pa也要用字符型return 0; }因为*p指向的是地址&…...

MySQL MVCC精讲
版本链 我们前面说过,对于使用InnoDB存储引擎的表来说,它的聚簇索引记录中都包含两个必要的隐藏列(row_id并不是必要的,我们创建的表中有主键或者非NULL的UNIQUE键时都不会包含row_id列): trx_idÿ…...

如何快速删除pdf周围的空白
问题:写论文往往需要pdf格式的图片,但pdf往往四周存在大量空白需要手动截图很麻烦 解决: 打开命令行输入:pdfcrop 图片名.pdf...
蓝桥杯c/c++程序设计——数位排序
数位排序【第十三届】【省赛】【C组】 题目描述 小蓝对一个数的数位之和很感兴趣,今天他要按照数位之和给数排序。 当两个数各个数位之和不同时,将数位和较小的排在前面,当数位之和相等时,将数值小的排在前面。 例如࿰…...

【通讯录案例-搭建登录界面 Objective-C语言】
一、来看我们这个通讯录案例 1.接下来啊,我们来做这个通讯录案例, 然后呢,做这么一个应用程序啊, 我们第一步呢,先把界面儿搭了, 然后呢,搭之前,简单的来分析一下, 首先呢,这是,中间儿的这一块儿, 1)有个“账户”、“密码”,这一块儿, 这是一个什么控制器,…...

二叉搜索树、AVL、红黑树、B树
文章目录 二叉搜索树2. avl树3. 红黑树 b树和b树比较适合与磁盘打交道的,磁盘操作耗时,这些树 矮,红黑树、avL树高,比较适合与内存打交道。 二叉搜索树 找一个节点的前驱和后继: 前驱:如果节点有左子树&a…...
格密码:傅里叶矩阵
目录 一. 铺垫性介绍 1.1 傅里叶级数 1.2 傅里叶矩阵的来源 二. 格基与傅里叶矩阵 2.1 傅里叶矩阵详细解释 2.2 格基与傅里叶矩阵 写在前面:有关傅里叶变换的解释太多了,这篇博客主要总结傅里叶矩阵在格密码中的运用。对于有一定傅里叶变换基础的同…...
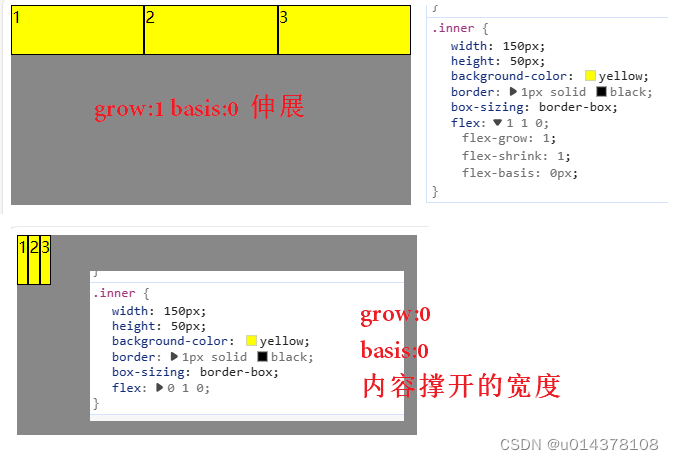
flex--伸缩性
1.flex-basis flex-basis 设置的是主轴方向的基准长度,会让宽度或高度失效。 备注:主轴横向:宽度失效;主轴纵向:高度失效 作用:浏览器根据这个属性设置的值,计算主轴上是否有多余空间&#x…...

linux中主从复制的架构和读写分离的方式
读写分离 互相主从架构注意点 双主双从架构注意点 一主多从架构注意点 读写分离概念部署jdk环境上传文件,解压文件配置环境变量 部署mycat环境mycat配置文件给所有数据库创建访问用户配置 server.xml配置 schema.xml启动mycat查看启动端口日志负载均衡测试 遇到的问…...
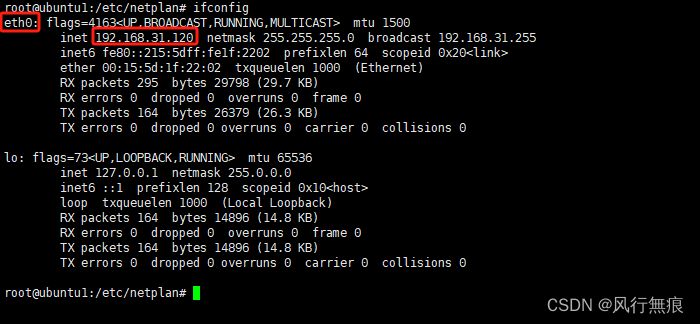
Ubuntu 22.04.3 Server 设置静态IP 通过修改yaml配置文件方法
目录 1.查看网卡信息 2.修改yaml配置文件 3.应用新的网络配置 4.重新启动网络服务 文章内容 本文介绍Ubuntu 22.04.3 Server系统通过修改yaml配置文件配置静态 ip 的方法。 1.查看网卡信息 使用ifconfig命令查看网卡信息获取网卡名称 如果出现Command ifconfig not fo…...

EasyCVR无人机推流+人数统计AI算法,助力公共场所人群密度管控
一、背景与需求 在公共场所和大型活动的管理中,人数统计和人群密度控制是非常重要的安全问题。传统的方法可能存在效率低下或准确度不足的情况,无法满足现代社会的需求。TSINGSEE青犀可以利用无人机推流AI人流量统计算法,基于计算机视觉技术…...

Kotlin 接口
Kotlin 的接口可以既包含抽象方法的声明也包含实现;接口无法保存状态;可以有属性但必须声明为抽象或提供访问器实现 1、定义 使用关键字 interface 来定义接口 interface MyInterface {fun bar()fun foo() {// 可选的方法体} } 2、 实现接口 一个类…...

PPTist免费在线演示文稿制作完全指南:从零到专业演示的终极教程
PPTist免费在线演示文稿制作完全指南:从零到专业演示的终极教程 【免费下载链接】PPTist PowerPoint-ist(/pauəpɔintist/), An online presentation application that replicates most of the commonly used features of MS PowerPoint, al…...

C++ `dynamic_cast
1. 基础 C类型转换概览为什么需要dynamic_cast 2. dynamic_cast 的使用 基本语法与其他类型转换(如 static_cast、reinterpret_cast 和 const_cast)的对比 3. RTTI (运行时类型信息) 什么是RTTI如何在C中启用和禁用RTTI 4. dynamic_cast 与多态 使用dyna…...
HSTracker:为macOS炉石传说玩家打造的数据智能助手
HSTracker:为macOS炉石传说玩家打造的数据智能助手 【免费下载链接】HSTracker A deck tracker and deck manager for Hearthstone on macOS 项目地址: https://gitcode.com/gh_mirrors/hs/HSTracker 在瞬息万变的炉石传说对局中,你是否曾因忘记对…...
如何彻底解决TranslucentTB的Microsoft.VCLibs依赖缺失问题:3步诊断与修复指南
如何彻底解决TranslucentTB的Microsoft.VCLibs依赖缺失问题:3步诊断与修复指南 【免费下载链接】TranslucentTB A lightweight utility that makes the Windows taskbar translucent/transparent. 项目地址: https://gitcode.com/gh_mirrors/tr/TranslucentTB …...

ZVM嵌入式实时虚拟机:在ARMv8-A上实现Linux与Zephyr的混合关键性系统
1. 项目概述与核心价值如果你正在从事嵌入式系统开发,尤其是涉及汽车电子、工业控制或5G通信设备这类对实时性和可靠性要求极高的领域,那么你肯定对“既要、又要、还要”的困境深有体会。我们常常需要在同一块硬件上,既要运行一个功能丰富、生…...

词达人自动化助手终极指南:如何让英语学习效率提升10倍
词达人自动化助手终极指南:如何让英语学习效率提升10倍 【免费下载链接】cdr 微信词达人,高正确率,高效简洁。支持班级任务及自选任务 项目地址: https://gitcode.com/gh_mirrors/cd/cdr 你是否曾经面对堆积如山的英语词汇任务感到力不…...

【为风光储一体化系统注入精准“心跳”的隐形力量】
在“双碳”战略目标的宏伟蓝图下,构建以新能源为主体的新型电力系统已成为时代命题。风光储一体化,作为平滑新能源波动、提升电网消纳能力的关键路径,正迎来前所未有的发展机遇。在这一变革性的能源体系中,每一处精密的控制与高效…...

C++虚函数从原理到实践:多态实现、设计模式与性能优化
1. 项目概述:从“魔法”到“利器”的认知转变虚函数,对于很多刚接触C的开发者来说,常常被看作一种“黑魔法”——知道它能实现多态,但具体怎么用、什么时候用、用不好会有什么坑,心里却没底。我见过不少项目࿰…...

Efinity RISC-V IDE实战指南:FPGA软硬件协同开发与调试
1. 项目概述:为什么你需要关注Efinity RISC-V IDE?如果你正在或即将踏入RISC-V开发的世界,尤其是涉及到FPGA(现场可编程门阵列)的软硬件协同设计,那么“Efinity RISC-V IDE”这个名字你大概率绕不开。它不是…...

[特殊字符] 零基础搭建「知识科普讲师」数字人|魔珐星云实战指南
在短视频、知识付费、自媒体赛道,知识科普、职场干货、生活常识、读书分享内容需求越来越大。真人出镜成本高、拍摄慢、文案难量产,而AI 数字人讲师可以做到:文案好写、生成快、24 小时可播、风格稳定、形象专业。 本文基于魔珐星云具身智能…...