【Leetcode】重排链表、旋转链表、反转链表||
目录
💡重排链表
题目描述
方法一:
方法二:
💡旋转链表
题目描述
方法:
💡反转链表||
题目描述
方法:
💡总结

💡重排链表
题目描述
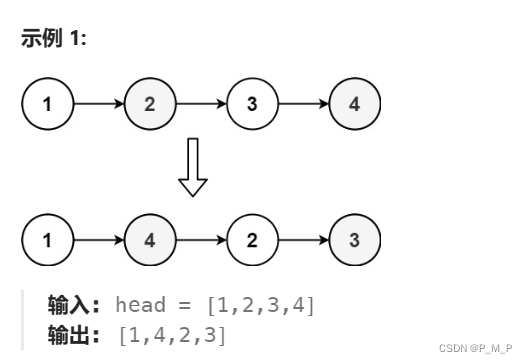
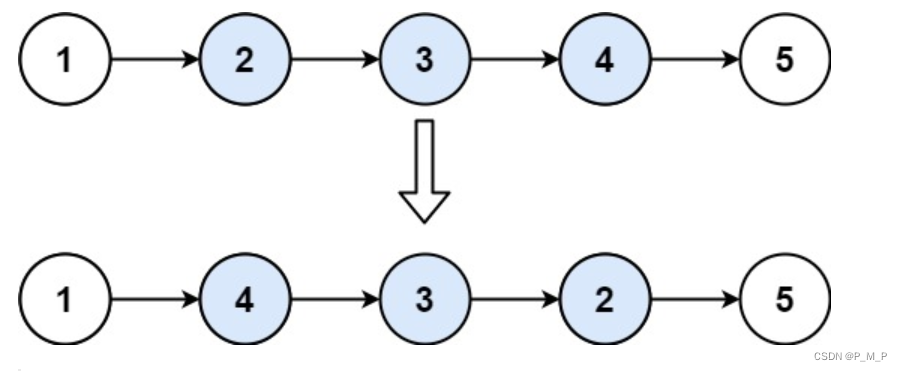
给定一个单链表 L 的头节点 head ,单链表 L 表示为:
L0 → L1 → … → Ln-1 → Ln
请将其重新排列后变为:
L0 → Ln → L1 → Ln-1 → L2 → Ln-2 → …
不能只是单纯的改变节点内部的值,而是需要实际的进行节点交换。
提示:
- 链表的长度范围为
[1, 5 * 104] 1 <= node.val <= 1000
方法一:
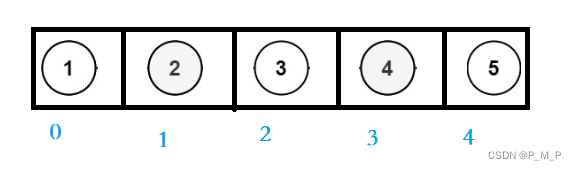
将链表的每一个节点存在数组里,然后用下标访问的方式,交叉连接。

/*** Definition for singly-linked list.* struct ListNode {* int val;* struct ListNode *next;* };*/typedef struct ListNode ListNode;
void reorderList(struct ListNode* head){if(head->next==NULL||head->next->next==NULL)return;ListNode* arr[50001];ListNode* cur=head;int n=0;while(cur){arr[n]=cur;cur=cur->next;n++;}int i=0;int j=n-1;while(i<j){arr[i]->next=arr[j];i++;arr[j]->next=arr[i];j--;}arr[i]->next=NULL;}方法二:
可以先用快慢指针的方法找到链表的中间节点,然后将中点后的链表翻转成一个新的链表,最后将这个新链表和原链表切割掉中间节点之后的链表合并成一个新的链表,合并方式是交叉合并。


/*** Definition for singly-linked list.* struct ListNode {* int val;* struct ListNode *next;* };*/typedef struct ListNode ListNode;
ListNode* MiddleNode(ListNode* head)
{ListNode* fast=head;ListNode* slow=head;while(fast!=NULL&&fast->next!=NULL){fast=fast->next->next;slow=slow->next;}return slow;
}
ListNode* ReverseList(ListNode* head)
{ListNode* phead=NULL;ListNode* cur=head;while(cur){ListNode* tmp=cur->next;//注意先后顺序cur->next=phead;phead=cur;cur=tmp;}return phead;
}
void reorderList(struct ListNode* head){ListNode* mid=MiddleNode(head);ListNode* phead=ReverseList(mid->next);mid->next=NULL;ListNode* cur=head;while(phead){ListNode* next=cur->next;cur->next=phead;ListNode* tmp= phead->next;phead->next=next;phead=tmp;cur=cur->next->next;}}💡旋转链表
题目描述
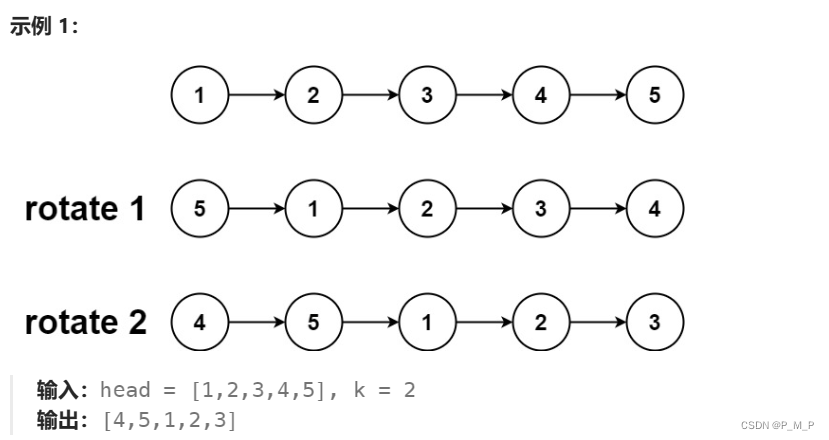
给你一个链表的头节点 head ,旋转链表,将链表每个节点向右移动 k 个位置。
提示:
- 链表中节点的数目在范围
[0, 500]内 -100 <= Node.val <= 1000 <= k <= 2 * 109
方法:
要求每个节点向右移动k位置,其实就是将倒数k个结点接在头节点之前,倒数第k个结点成为新的头节点,但是这里需要对k进行处理,因为k可能大于链表长度,所以k=k%len,还有一个需要注意的就是当k==len时,是不需要进行任何操作的,直接返回头节点就可以了。

/*** Definition for singly-linked list.* struct ListNode {* int val;* struct ListNode *next;* };*/
typedef struct ListNode ListNode;
struct ListNode* rotateRight(struct ListNode* head, int k) {if(head==NULL||k==0)return head;ListNode* cur=head;ListNode* prev=head;ListNode* ret=head;int l=0;while(ret){ret=ret->next;l++;}k=k%l;if(k==0)return head;while(k--){cur=cur->next;}while(cur->next){cur=cur->next;prev=prev->next;}ListNode* Next=prev->next;cur->next=head;prev->next=NULL;return Next;
}💡反转链表||
题目描述
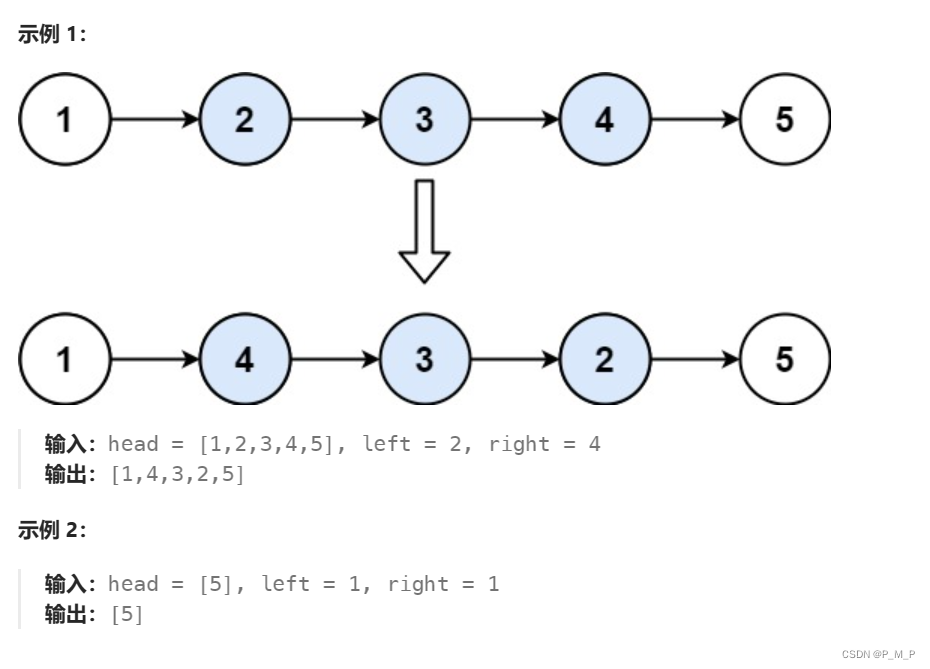
给你单链表的头指针 head 和两个整数 left 和 right ,其中 left <= right 。请你反转从位置 left 到位置 right 的链表节点,返回 反转后的链表 。
提示:
- 链表中节点数目为
n 1 <= n <= 500-500 <= Node.val <= 5001 <= left <= right <= n
方法:
我的方法就是将区间[left,right]之间的结点翻转,然后与原来区间前后的结点重新连接起来。

/*** Definition for singly-linked list.* struct ListNode {* int val;* struct ListNode *next;* };*/
typedef struct ListNode ListNode;
struct ListNode* reverseList(struct ListNode* head,struct ListNode* tail)
{ListNode*phead=NULL;//新的头ListNode*cur=head;while(cur!=tail)//遍历原链表{ListNode*next=cur->next;//保存下一个节点的地址,避免丢失cur->next=phead;phead=cur;//更新头节点cur=next;//继续遍历}return phead;
}
struct ListNode* reverseBetween(struct ListNode* head, int left, int right) {ListNode* cur1=head;ListNode* cur2=head;int cnt=1;while(cnt<left-1){cur1=cur1->next;cur2=cur2->next;cnt++;}while(cnt<=right){cur2=cur2->next;cnt++;}ListNode* tail=NULL; if(cur2!=NULL)tail=cur2;if(left==1)head=reverseList(cur1,cur2);elsecur1->next=reverseList(cur1->next,cur2);while(cur1->next){cur1=cur1->next;}cur1->next=tail;return head;
}💡总结
链表相关的题目还是要注意细节,结点之间的切割与连接要特别仔细,不然任意造成空结点,或者成环导致死循环。
相关文章:
【Leetcode】重排链表、旋转链表、反转链表||
目录 💡重排链表 题目描述 方法一: 方法二: 💡旋转链表 题目描述 方法: 💡反转链表|| 题目描述 方法: 💡总结 💡重排链表 题目描述 给定一个单链表 L 的头节…...
RabbitMQ 报错:Failed to declare queue(s):[QD, QA, QB]
实在没想到会犯这种低级错误。 回顾整理一下吧: 原因:SpringBoot主配置类默认只会扫描自己所在的包及其子包下面的组件。其他位置的配置不会被扫描。 如果非要使用其他位置,就需要在启动类上面指定新的扫描位置。注意新的扫描位置会覆盖默…...
Neo4j 5建库
Neo4j 只有企业版可以运行多个库,社区版无法创建多个库,一个实例只能运行一个库; 如果业务需要使用多个库怎么办呢? 就是在一个机器上部署多个实例,每个实例单独一个库名 这个库的名字我们可以自己定义; …...

鲁棒最小二乘法 拟合圆
圆拟合算法_基于huber加权的拟合圆算法-CSDN博客 首次拟合圆得到采用的上述blog中的 Ksa Fit 方法。 该方法存在干扰点时,拟合得到的结果会被干扰。 首次拟合圆的方法 因此需要针对外点增加权重因子,经过多次迭代后&…...

LeetCode——动态规划
动态规划 一、一维数组:斐波那契数列 爬楼梯70简单 dp定义: dp[i]表示爬到第i阶有多少种不同的方式 状态转移方程: dp[i] dp[i-1] dp[i-1] (每次可以爬1或2个台阶) 边界条件: dp[0] 1; dp[1] 1;&#…...

opencv和gdal的读写图片波段顺序问题
最近处理遥感影像总是不时听到 图片的波段错了,一开始不明就里,都是图片怎么就判断错了。 1、图像RGB波段顺序判断 后面和大家交流,基本上知道了一个判断标准。 一般来说,进入人眼的自然画面在计算机视觉中一般是rgb波段顺序表示…...

PyQt 打包成exe文件
参考链接 Python程序打包成.exe(史上最全面讲解)-CSDN博客 手把手教你将pyqt程序打包成exe(1)_pyqt exe-CSDN博客 PyInstaller 将DLL文件打包进exe_怎么把dll文件加到exe里-CSDN博客 自己的问题 按照教程走的话,会出现找不到“mmdeploy_ort_net.dll”文件的报错…...
)
【Web2D/3D】SVG(第二篇)
1. 前言 SVG(Scalable Vector Graphics,可缩放矢量图形)是一种使用XML描述2D图形的语言,由于SVG是基于XML(HTML也是基于XML的),因为SVG DOM中每个元素都是可以操作的,包含修改元素属…...

leetcode18. 四数之和
题目描述 给你一个由 n 个整数组成的数组 nums ,和一个目标值 target 。请你找出并返回满足下述全部条件且不重复的四元组 [nums[a], nums[b], nums[c], nums[d]] (若两个四元组元素一一对应,则认为两个四元组重复): …...
(十八)Flask之threaing.local()对象
0、引子: 如下是一段很基础的多线程代码: from threading import Threaddemo 0def task(arg):global demodemo argprint(demo)for i in range(10):t Thread(targettask, args(i, ))t. start()当程序运行时,可能会看到输出的顺序是混乱的…...
ffmpeg 硬件解码零拷贝unity 播放
ffmpeg硬件解码问题 ffmpeg 在硬件解码,一般来说,我们解码使用cuda方式,当然,最好的方式是不要确定一定是cuda,客户的显卡不一定有cuda,windows 下,和linux 下要做一些适配工作,最麻…...
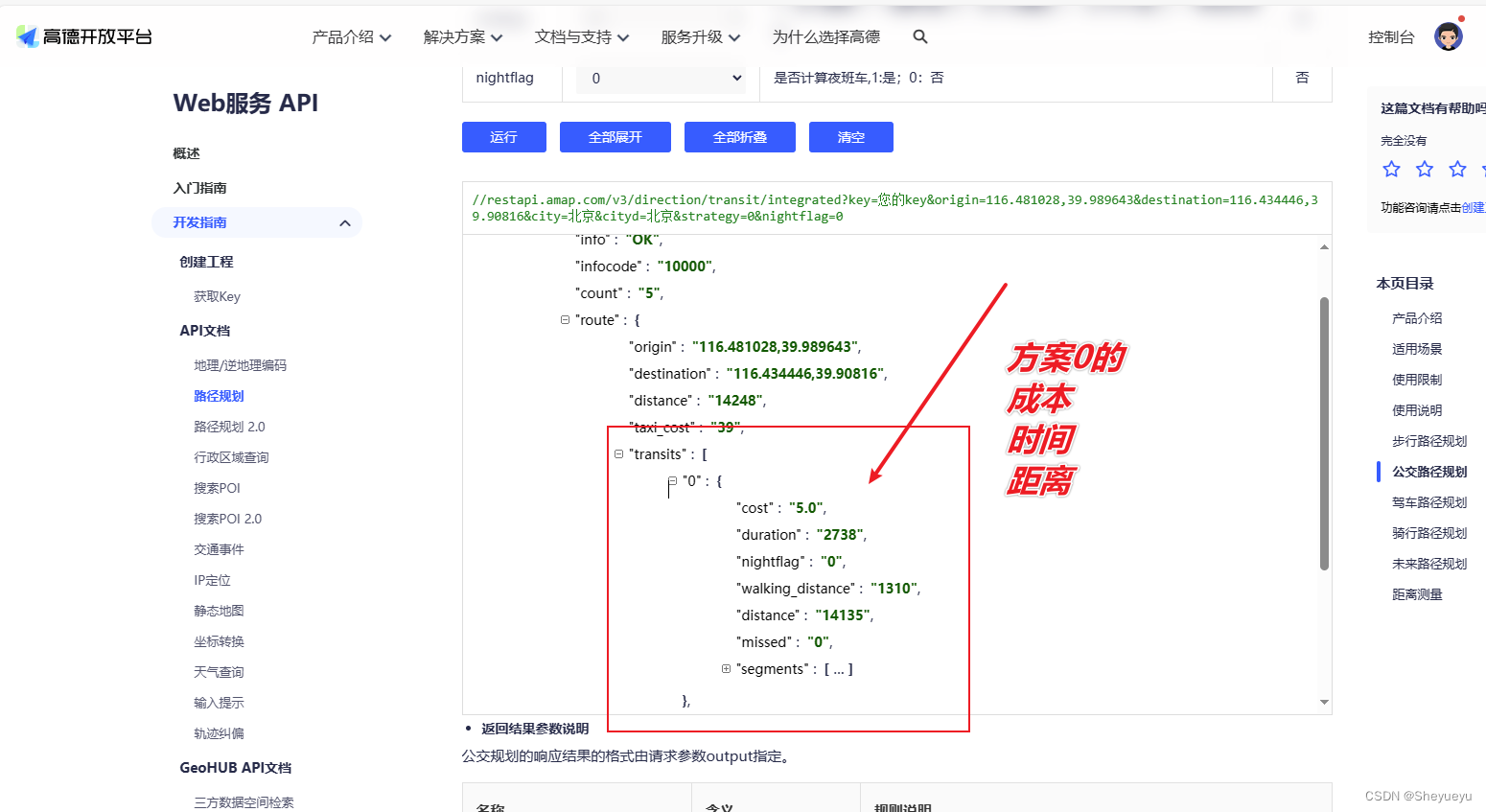
高德地图_公共交通路径规划API,获取两地点之间的驾车里程和时间
import pandas as pd import requests import jsondef get_dis_tm(origin, destination,city,cityd):url https://restapi.amap.com/v3/direction/transit/integrated?key xxx #这里就是需要去高德开放平台去申请key,请在xxxx位置填写,web服务APIlink {}origin{}&desti…...

PyTorch深度学习实战(28)——对抗攻击(Adversarial Attack)
PyTorch深度学习实战(28)——对抗攻击 0. 前言1. 对抗攻击2. 对抗攻击模型分析3. 使用 PyTorch 实现对抗攻击小结系列链接 0. 前言 近年来,深度学习在图像分类、目标检测、图像分割等诸多领域取得了突破性进展,深度学习模型已经能…...
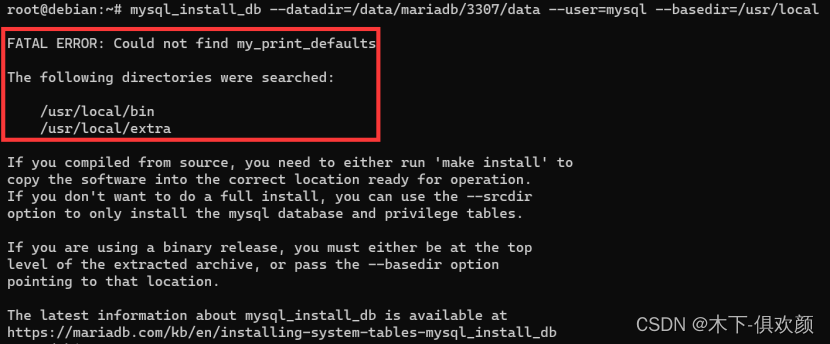
MariaDB单机多实例的配置方法
1、什么是数据库的单机多实例 数据库的单机多实例是指在一台物理服务器上运行多个数据库实例。这种部署方式允许多个数据库实例共享相同的物理资源,如CPU、内存和存储,从而提高硬件利用率并降低成本。每个数据库实例可以独立运行,处理不同的…...
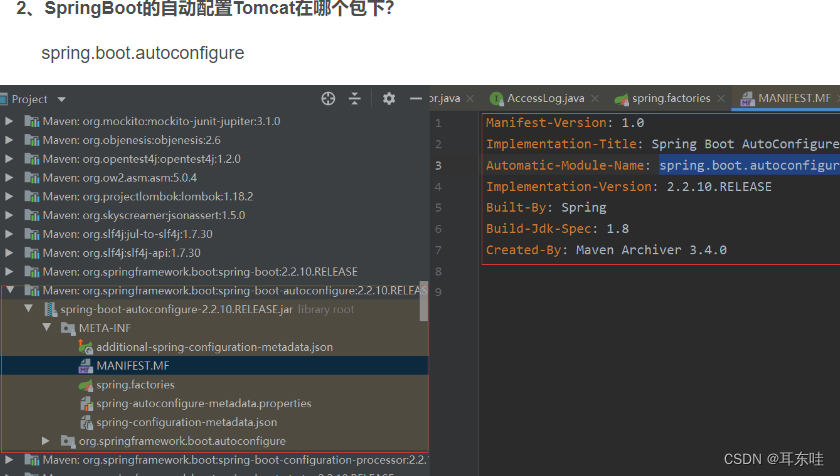
加强->servlet->tomcat
0什么是servlet jsp也是servlet 细细体会 Servlet 是 JavaEE 的规范之一,通俗的来说就是 Java 接口,将来我们可以定义 Java 类来实现这个接口,并由 Web 服务器运行 Servlet ,所以 TomCat 又被称作 Servlet 容器。 Servlet 提供了…...

Python初学者必须吃透的69个内置函数!
所谓内置函数,就是Python提供的, 可以直接拿来直接用的函数,比如大家熟悉的print,range、input等,也有不是很熟,但是很重要的,如enumerate、zip、join等,Python内置的这些函数非常精巧且强大的&…...
Day73力扣打卡
打卡记录 统计移除递增子数组的数目 II(双指针) 链接 class Solution:def incremovableSubarrayCount(self, a: List[int]) -> int:n len(a)i 0while i < n - 1 and a[i] < a[i 1]:i 1if i n - 1: # 每个非空子数组都可以移除return n …...
Android原生实现分段选择
六年前写的一个控件,一直没有时间总结,趁年底不怎么忙,整理一下之前写过的组件。供大家一起参考学习。废话不多说,先上图。 一、效果图 实现思路使用的是radioGroup加radiobutton组合方式。原理就是通过修改RadioButton 的backgr…...
在 Unity 中获取 Object 对象的编辑器对象
有这个需求的原因是,在编辑器的 Inspector 逻辑中,写了许多生成逻辑。 现在不想挨个在 Inspector 上都点一遍按钮,所以就需要能获取到它们的编辑器对象。 发现可以借助官方的 UnityEditor.Editor.CreateEditor 方法达到目的,如下…...
idea自动注释
前言 保存一下自己的自动注释代码 idea自动注释 前言1 创建类时,自动生成注释2 在方法上使用快捷键生成注释3 使用方法4 效果图 1 创建类时,自动生成注释 如下: #if (${PACKAGE_NAME} && ${PACKAGE_NAME} ! "")package …...

Linux串口编程进阶:深入termios2结构体,搞定CH340/FTDI各种转接器的非标准波特率
Linux串口编程实战:破解CH340/FTDI非标准波特率适配难题 当你在工业物联网项目中尝试将某个9600bps的设备升级到115200bps时,可能会发现某些USB转串口适配器死活不配合——明明代码正确,波特率却始终无法生效。这不是你的错,而是…...
)
Docker容器化高可用架构部署方案(十二)
11-MySQL-MGR初始化 本文档详细介绍MySQL MGR(Group Replication)集群的初始化步骤。 初始化前提 三个MySQL容器已正常运行 MySQL容器healthcheck通过 网络连通性正常 初始化步骤 步骤1:等待MySQL容器就绪 # 查看MySQL容器状态 docke…...

终极指南:Visual C++运行库合集AIO - 一站式解决Windows软件依赖问题
终极指南:Visual C运行库合集AIO - 一站式解决Windows软件依赖问题 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 还在为运行软件时遇到"找不到…...

3种高效方案解析:如何深度还原微信小程序源代码结构
3种高效方案解析:如何深度还原微信小程序源代码结构 【免费下载链接】wxappUnpacker forked from https://github.com/qwerty472123/wxappUnpacker 项目地址: https://gitcode.com/gh_mirrors/wxappu/wxappUnpacker 你是否曾面对一个加密的微信小程序包&…...

TrollInstallerX终极指南:iOS 14-16.6.1设备一键安装TrollStore
TrollInstallerX终极指南:iOS 14-16.6.1设备一键安装TrollStore 【免费下载链接】TrollInstallerX A TrollStore installer for iOS 14.0 - 16.6.1 项目地址: https://gitcode.com/gh_mirrors/tr/TrollInstallerX TrollInstallerX是一款专为iOS 14.0到16.6.1…...
)
中国航空器拥有者及驾驶员协会:我国低空经济重点政策制度汇编(2025)
这份文档是2025 年中国低空经济重点政策制度汇编,由中国航空器拥有者及驾驶员协会编制,全面梳理国家 地方两级低空经济相关法律法规、规章标准与产业政策,核心是构建低空经济 “法律 - 规章 - 标准 - 政策” 四层制度体系,为低空…...

RunAsTI终极指南:如何获取Windows最高TrustedInstaller权限
RunAsTI终极指南:如何获取Windows最高TrustedInstaller权限 【免费下载链接】RunAsTI Launch processes with TrustedInstaller privilege 项目地址: https://gitcode.com/gh_mirrors/ru/RunAsTI 在Windows系统管理中,有时即使拥有管理员权限也无…...

K210+STM32F103C8T6低成本送药小车全流程:从硬件选型到代码调试避坑
K210STM32F103C8T6低成本送药小车全流程:从硬件选型到代码调试避坑 当电子竞赛遇上嵌入式开发,一个融合视觉识别与运动控制的送药小车项目,往往成为检验技术实力的试金石。本文将带你从零开始,用K210视觉模块与STM32F103C8T6主控芯…...

TI SimpleLink平台实战:MSP432+CC3120构建统一嵌入式开发方案
1. 项目概述:为什么我们需要一个统一的嵌入式开发平台?如果你和我一样,在嵌入式行业摸爬滚打了几年,一定会对下面这个场景深有感触:老板今天说要做个带Wi-Fi的智能插座,你吭哧吭哧用ESP32调通了;…...

使用Taotoken聚合端点一个月,我的API调用延迟与稳定性观察记录
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用Taotoken聚合端点一个月,我的API调用延迟与稳定性观察记录 1. 项目背景与接入动机 我最近的一个个人项目需要持续…...