STM32 学习(一)新建工程

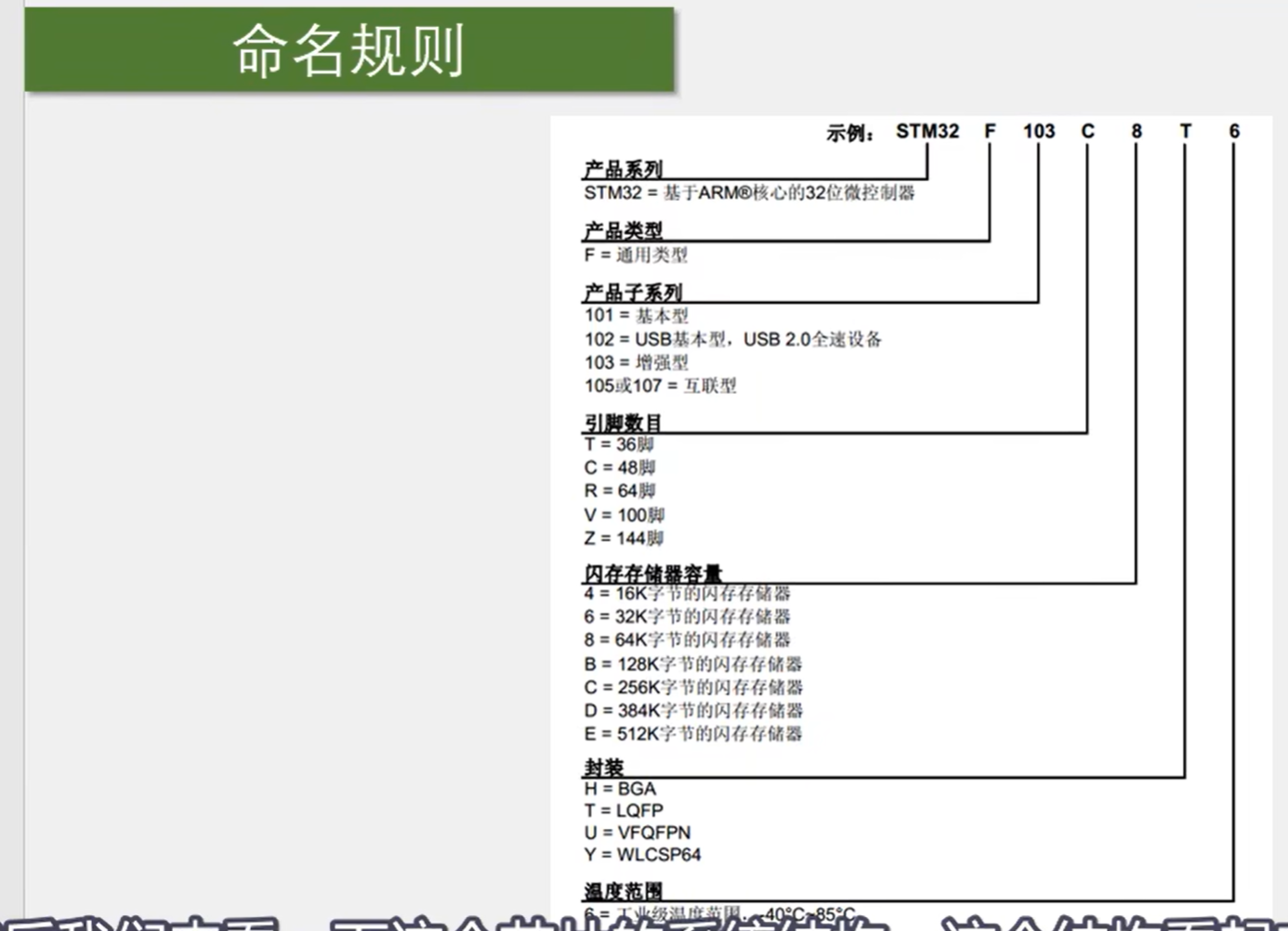
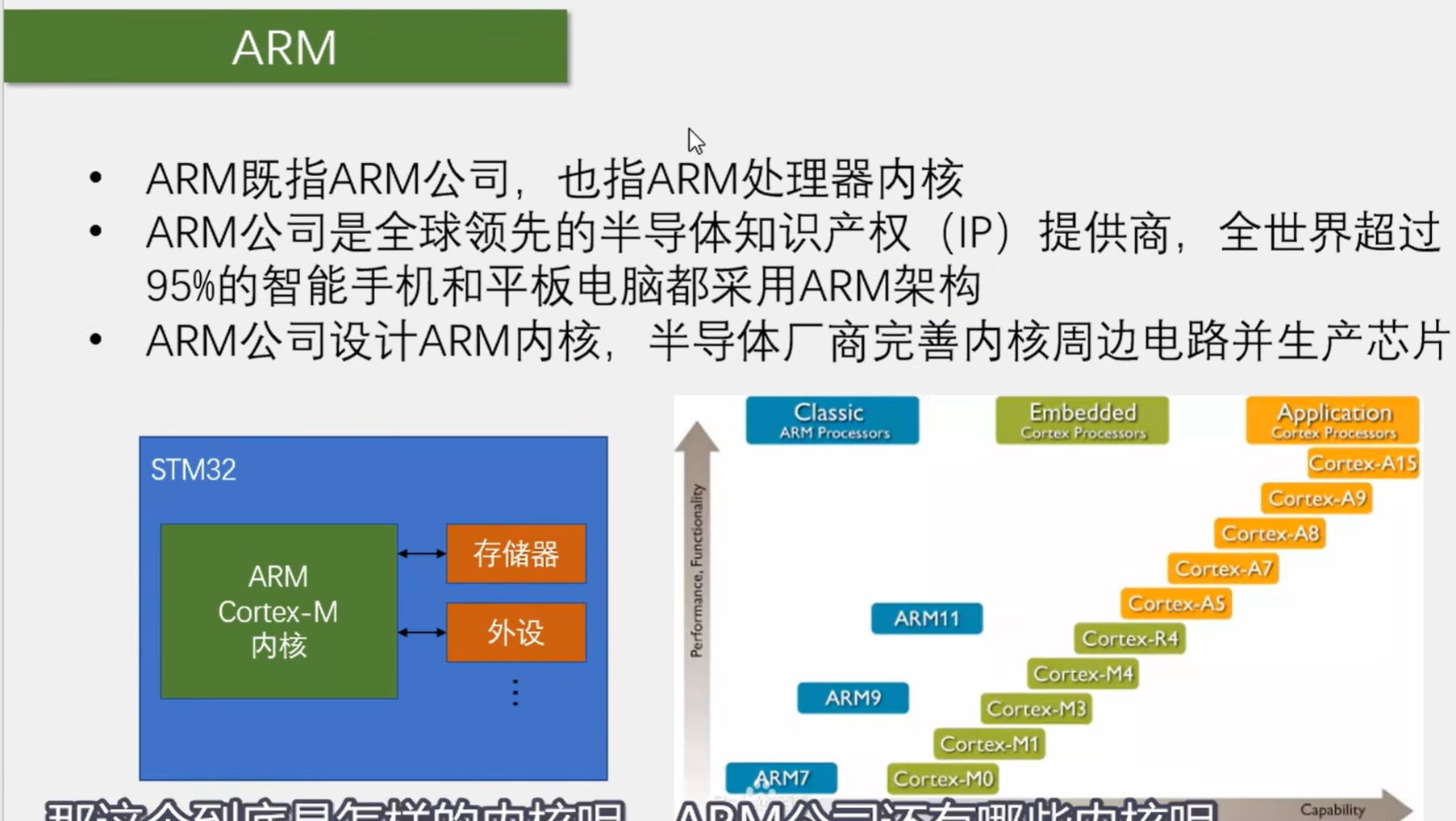 本课程使用的stm32型号
本课程使用的stm32型号

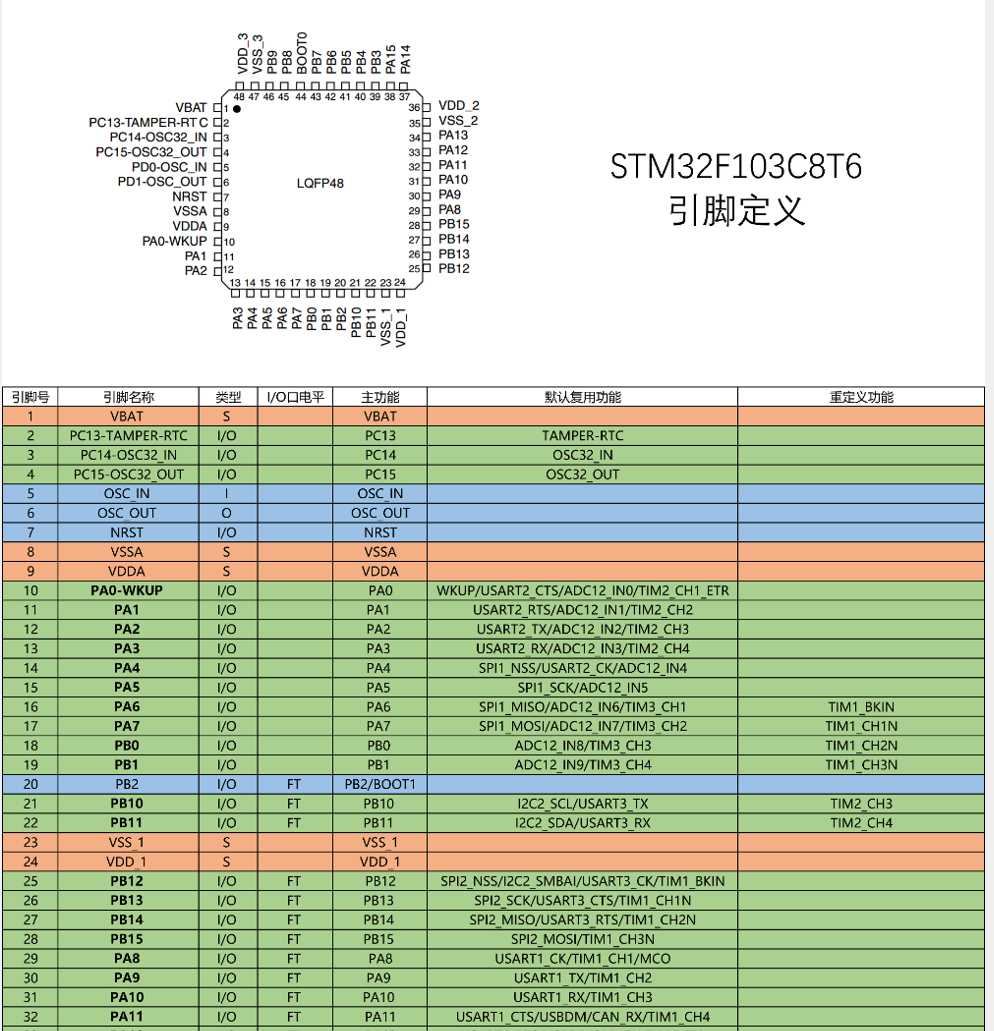
 引脚定义,有FT能接5v,没有FT能接3.3v
引脚定义,有FT能接5v,没有FT能接3.3v
启动配置
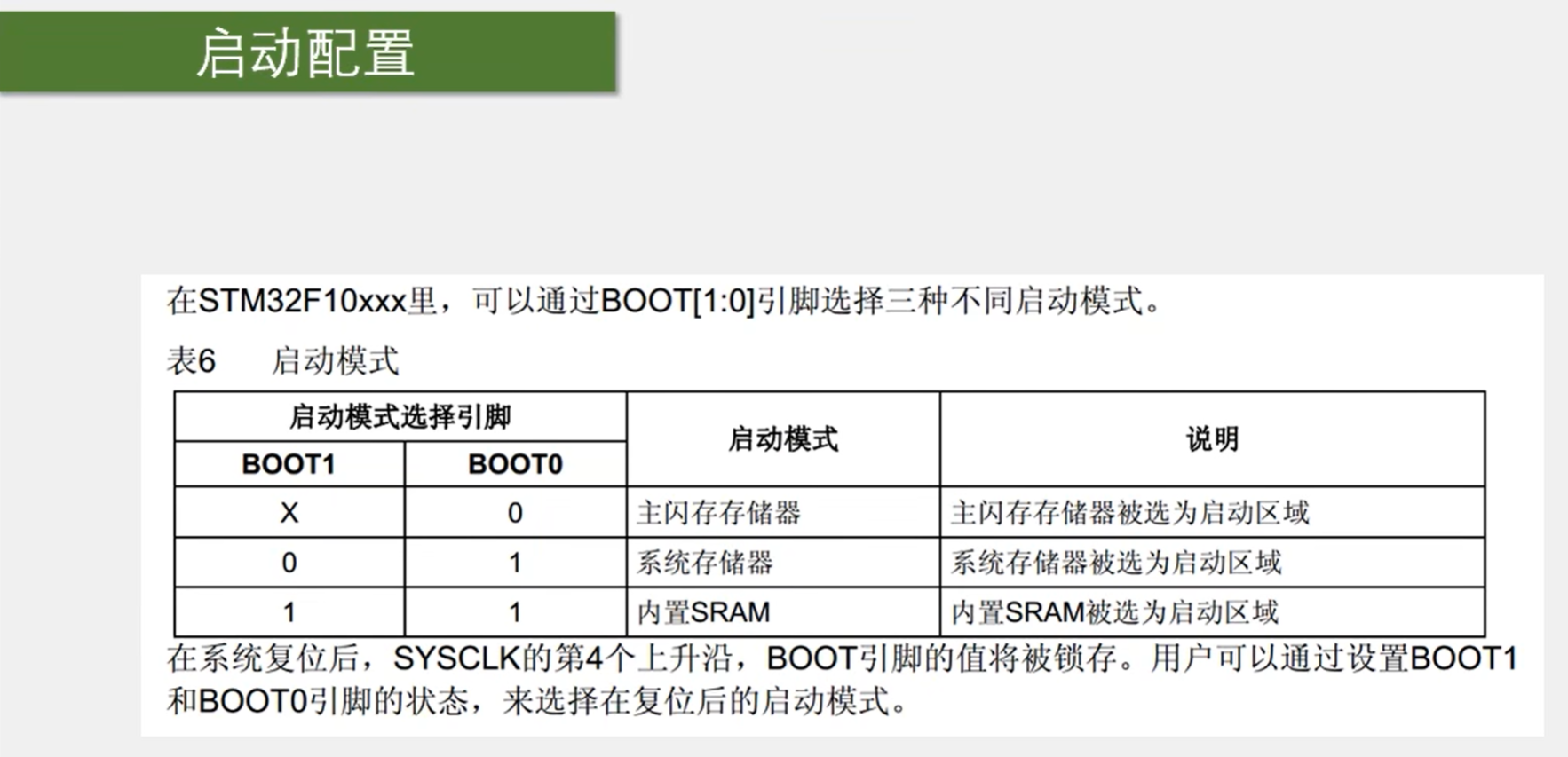 第二种启动模式中,系统存储器中存放了一部分Bootloader程序,该程序可以接收串口的数据,然后刷新到主闪存中,这样就可以使用串口下载程序。
第二种启动模式中,系统存储器中存放了一部分Bootloader程序,该程序可以接收串口的数据,然后刷新到主闪存中,这样就可以使用串口下载程序。
最小系统电路
能工作起来的最基本的电路,晶振 8M 赫兹通过锁相环倍频得到 72 hz;复位模块的 NRST 是低电平复位,当电路刚上电时,电容开始充电,此时 nrst 为低电平,而当电容充满电,由于电容的隔直功能,使得 nrst 电平逐渐升高。启动配置就是芯片上的跳线帽。

软件安装
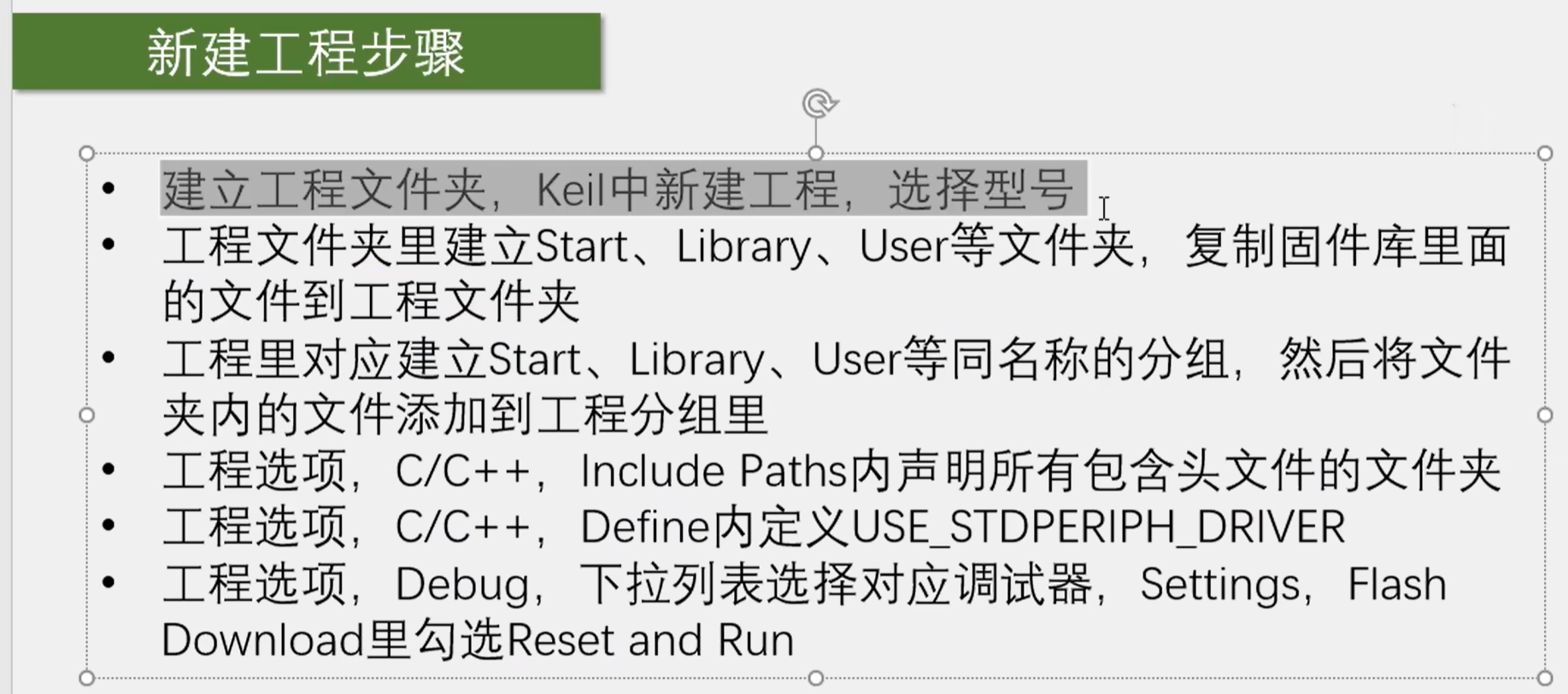
 新建工程
新建工程
1. 找到启动文件
D:\Users\Desktop\embedded\STM32入门教程资料\固件库\STM32F10x_StdPeriph_Lib_V3.5.0\Libraries\CMSIS\CM3\DeviceSupport\ST\STM32F10x\startup\arm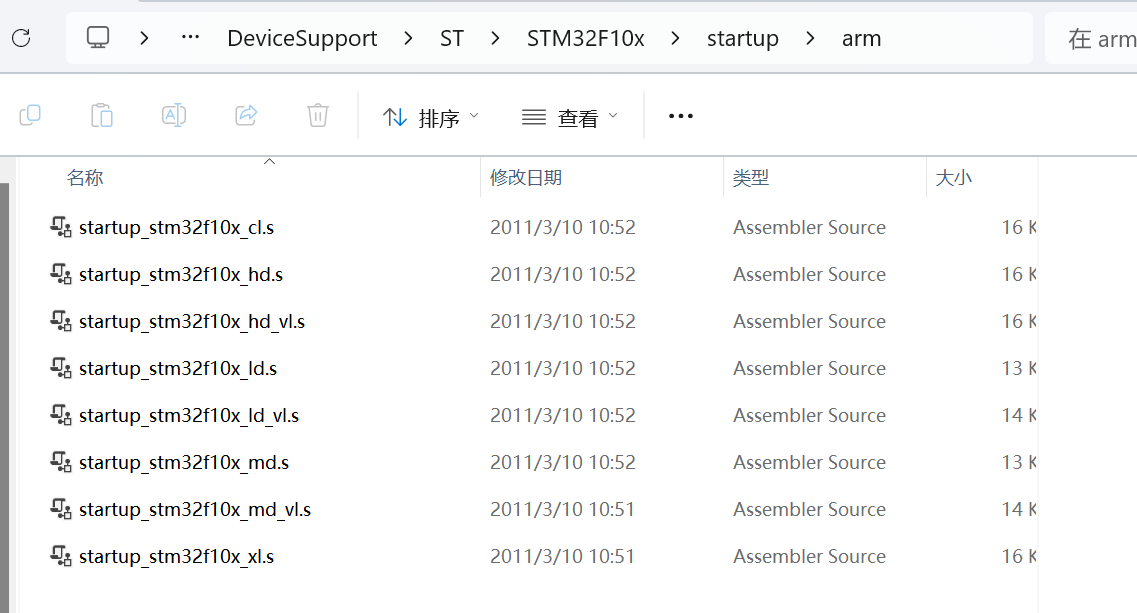
stm32f10x.h:描述芯片外围设备有哪些寄存器以及对应的地址。两个system文件主要用来配置时钟。

2. 找到内核寄存器描述文件以及内核配置函数
D:\Users\Desktop\embedded\STM32入门教程资料\固件库\STM32F10x_StdPeriph_Lib_V3.5.0\Libraries\CMSIS\CM3\CoreSupport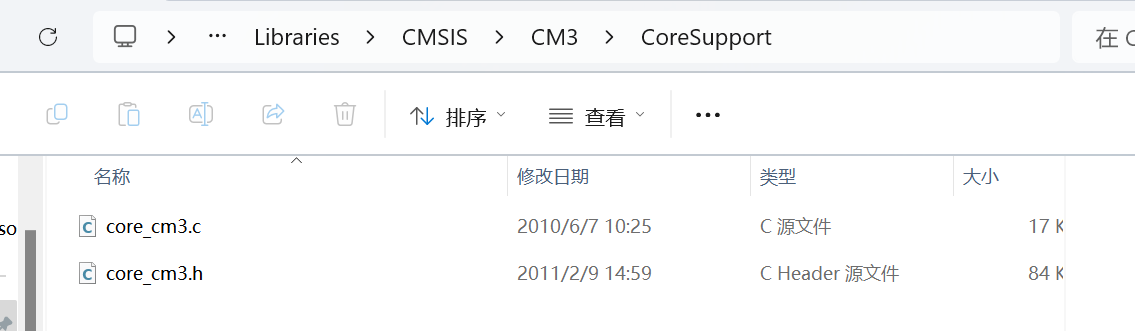
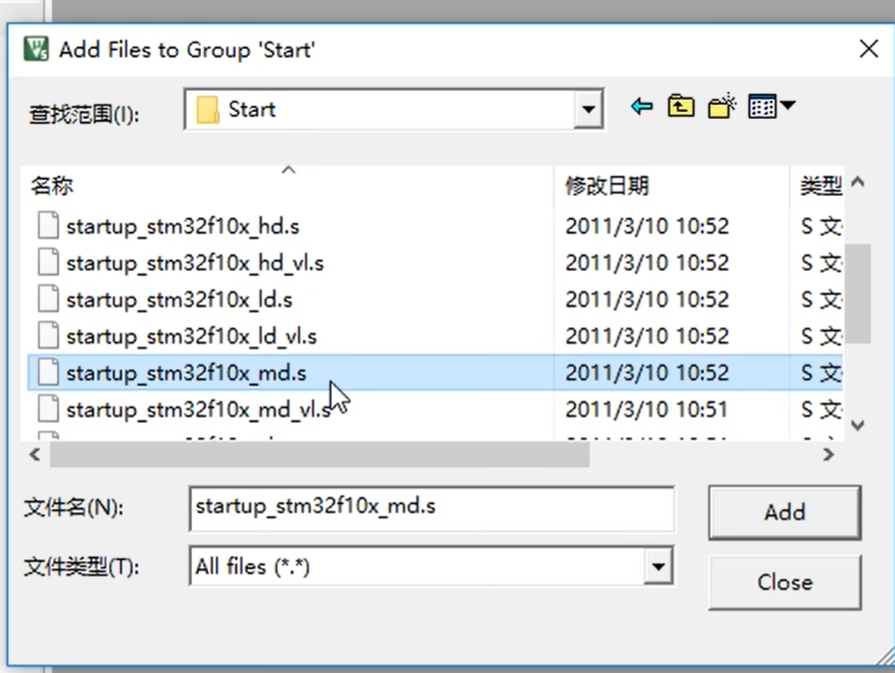
3. 添加启动文件
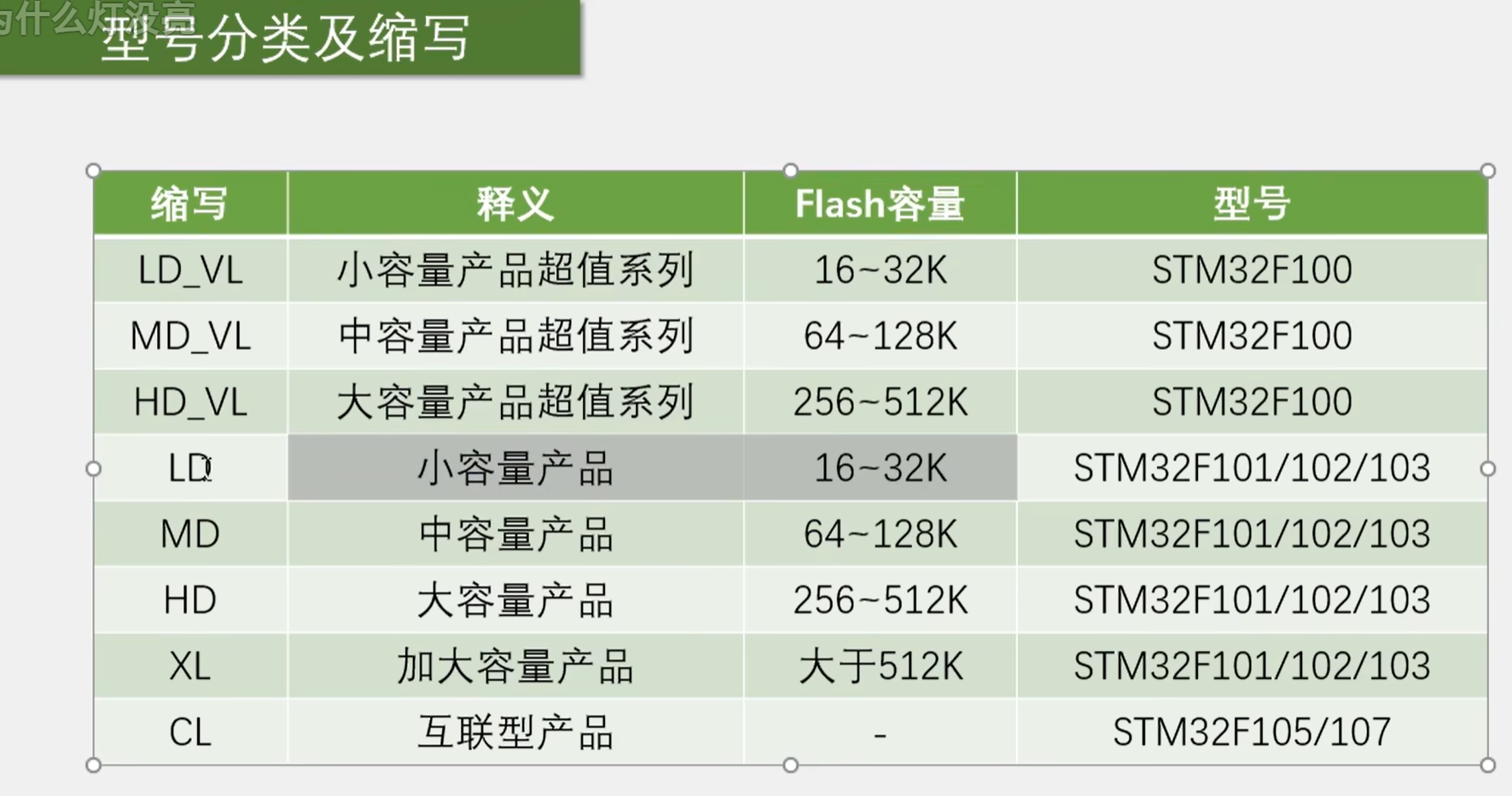
启动文件的选择:
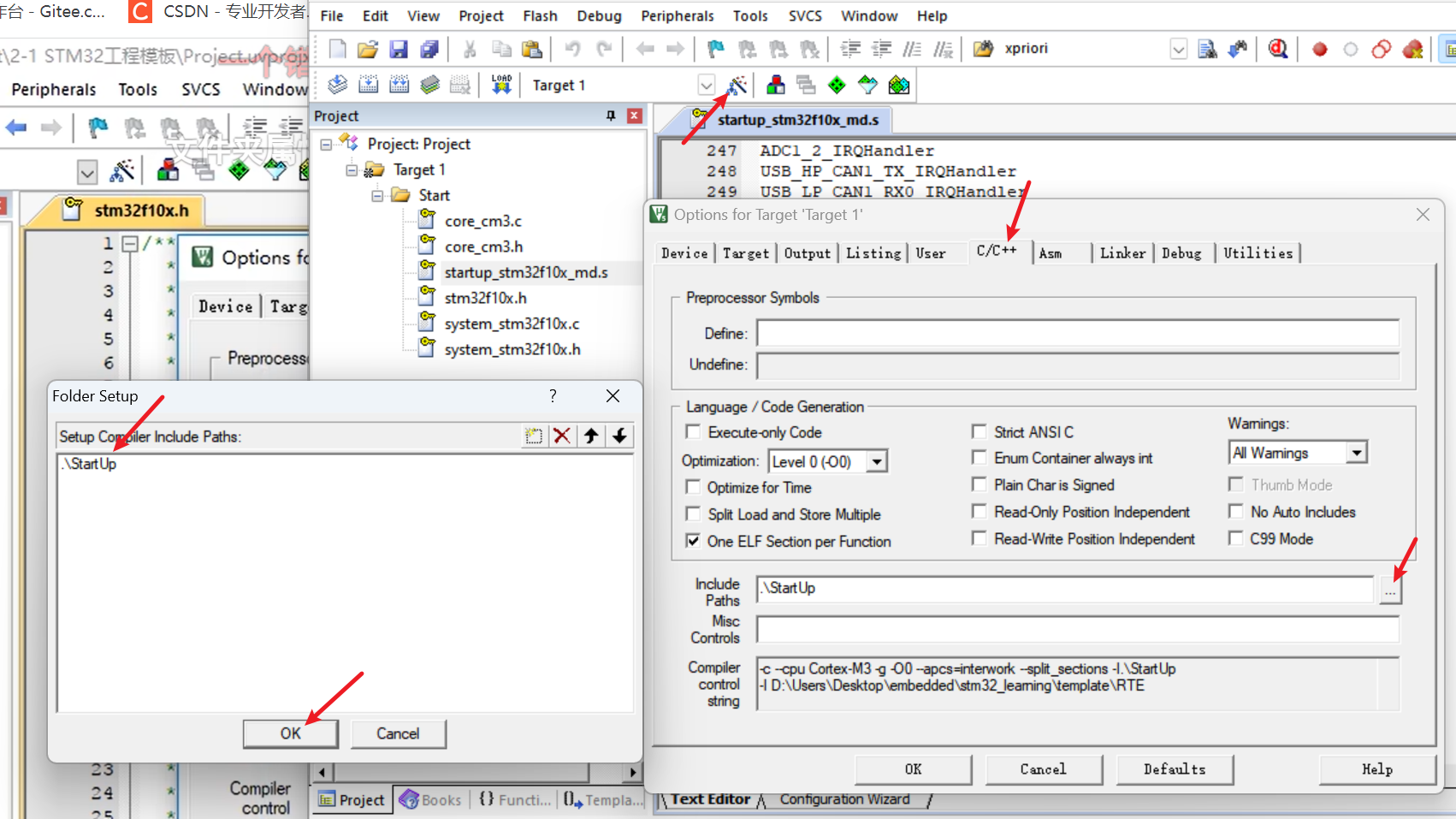
4. 添加头文件路径
5. 添加 main 函数
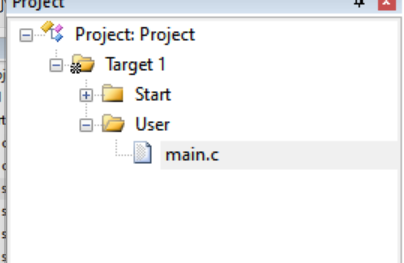
main.c 内容:
#include "stm32f10x.h"int main(void)
{while(1){}
}
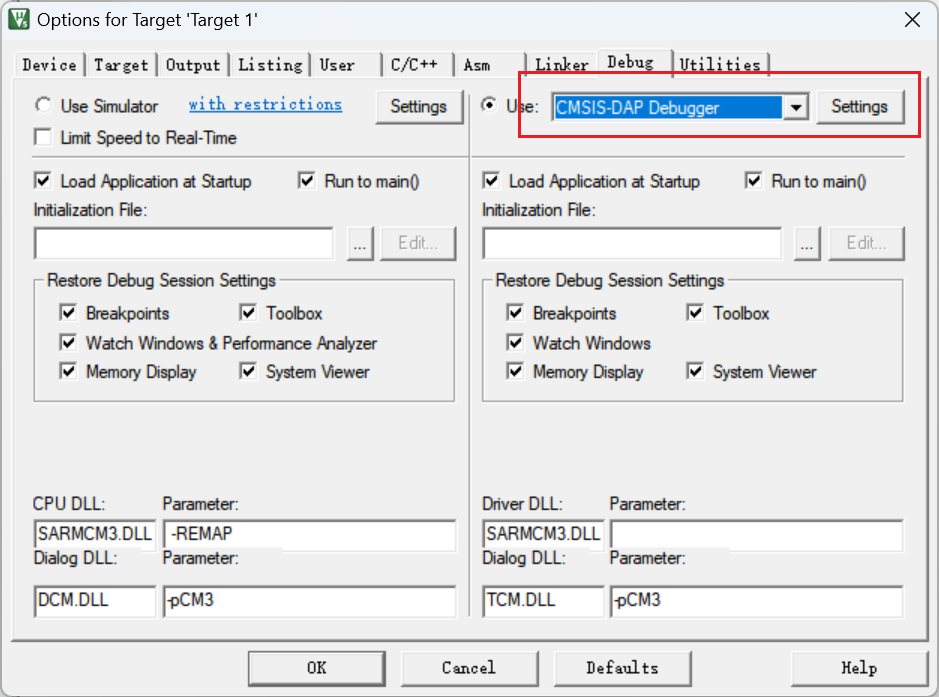
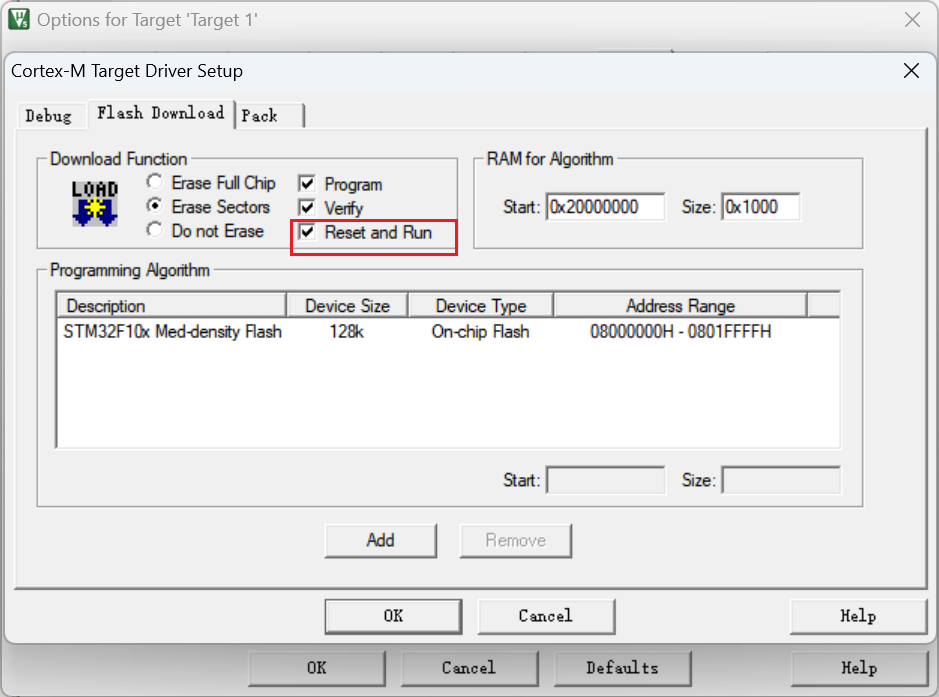
勾上 reset and run,这样下载程序后会立马复位并执行:
6. 使用寄存器点灯
使能 GPIOC 的时钟:
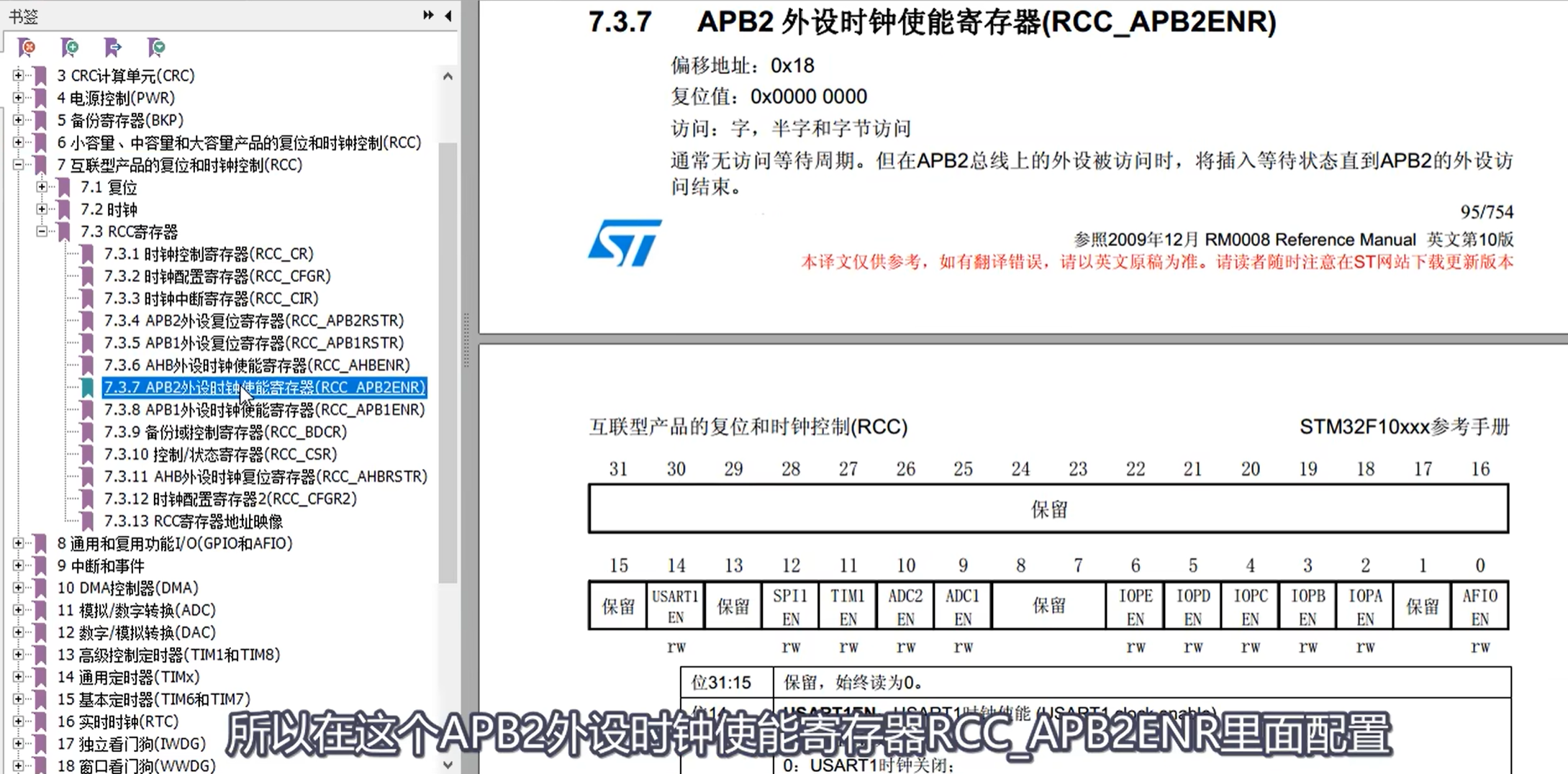

RCC->APB2ENR = 0x00000010;配置 pC13 口的模式(pC13 即为 led 的端口),CNF13 配置为通用推挽输出模式,MODE13 配置为输出模式。
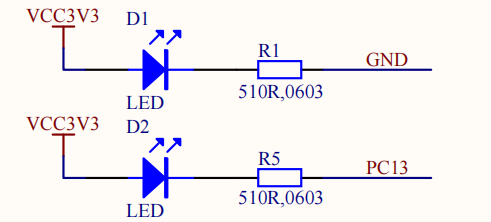


GPIOC->CRH = 0x00300000;接下来就可以给 pC13 口输出数据了,ODR13 为 1,则 pC13 为高电平,反之则为低电平,因为我们需要 led 亮起,所以要使得 pC13 为低电平。
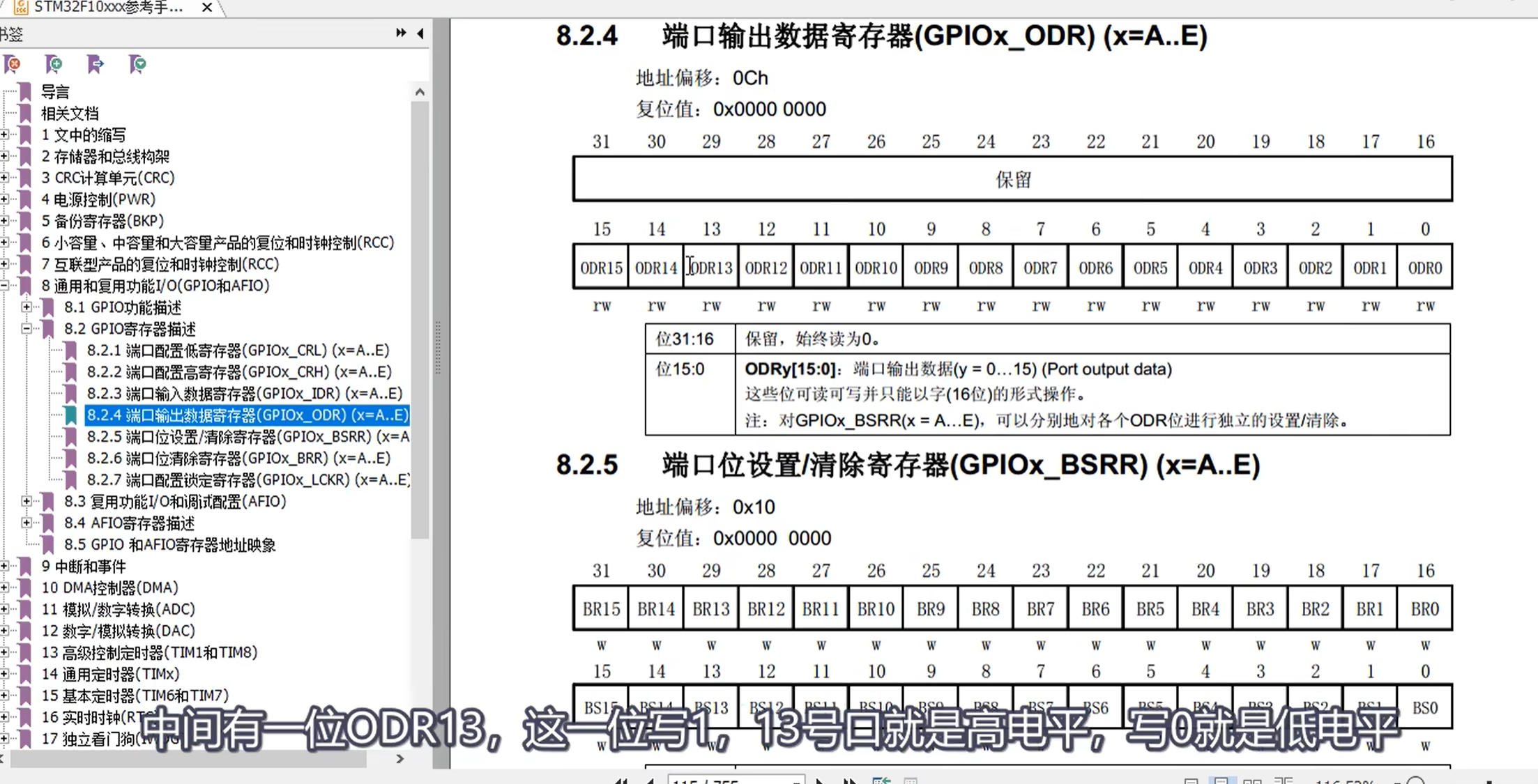
GPIOC->ODR = 0x00000000;整体代码如下,烧录后可以看到 led2 亮起:
#include "stm32f10x.h"int main(void)
{RCC->APB2ENR = 0x00000010;GPIOC->CRH = 0x00300000;GPIOC->ODR = 0x00000000;while(1){}
}7. 添加库函数
将库函数源码和头文件复制粘贴到 Library 目录下,然后在 keil 中导入:



还需要三个文件如下,conf 文件来配置函数库头文件的包含关系,两个 it 文件用来存放中断函数,粘贴到 User 目录下:

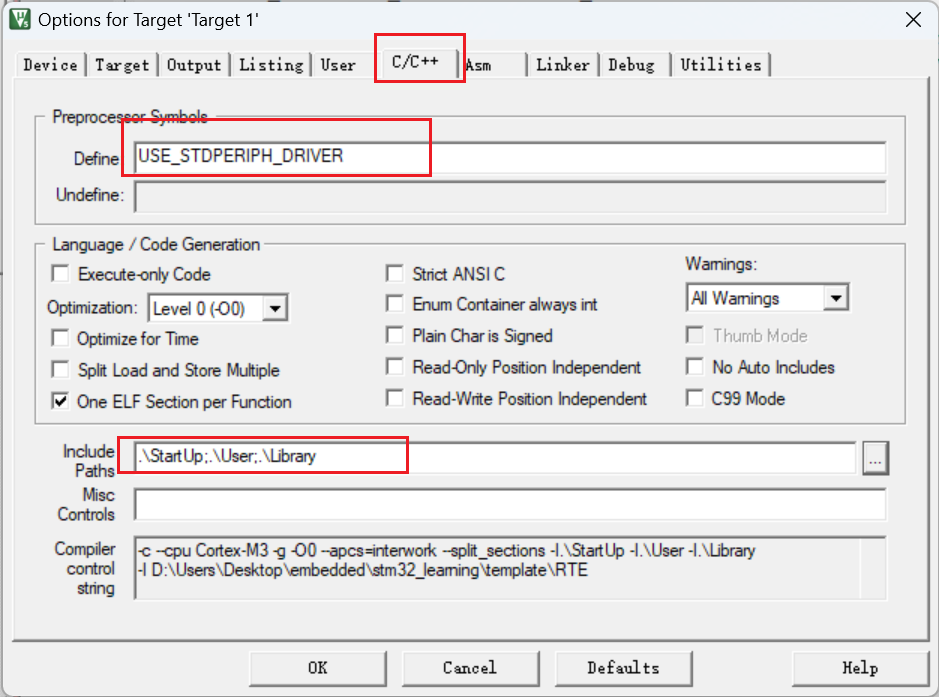
添加宏定义 USE_STDPERIPH_DRIVER:

8. 使用库函数进行点灯
代码如下:
#include "stm32f10x.h"int main(void)
{//RCC->APB2ENR = 0x00000010;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);//GPIOC->CRH = 0x00300000;GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStruct.GPIO_Pin = GPIO_Pin_13;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOC, &GPIO_InitStruct);//GPIOC->ODR = 0x00000000;GPIO_SetBits(GPIOC, GPIO_Pin_13); // 设置pC13高电平//GPIO_ResetBits(GPIOC, GPIO_Pin_13); // 设置pC13低电平while(1){}
}
9. 工程架构
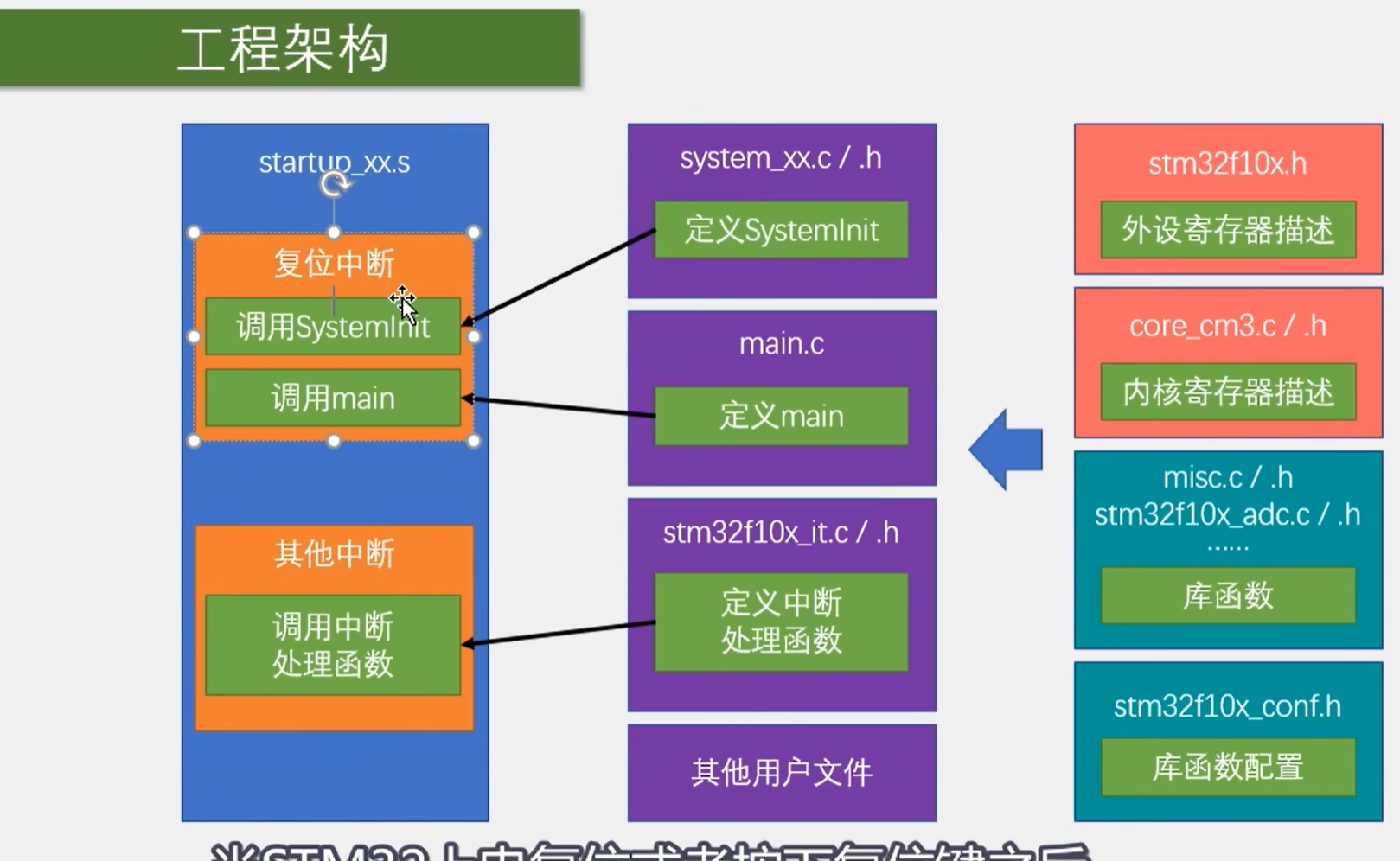
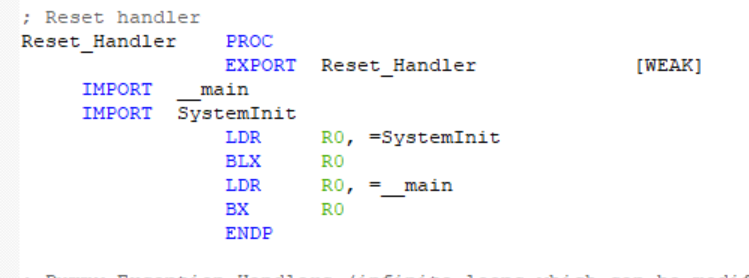
复位中断,先调用 SystemInit,再调用 __main。
相关文章:
STM32 学习(一)新建工程
本课程使用的stm32型号 引脚定义,有FT能接5v,没有FT能接3.3v 启动配置 第二种启动模式中,系统存储器中存放了一部分Bootloader程序,该程序可以接收串口的数据,然后刷新到主闪存中,这样就可以使用串口下载程…...

ROBOGUIDE教程:FANUC机器人固定点焊焊接虚拟仿真
目录 概述 机器人系统创建 焊接工件模型创建 机器人抓手工具添加与工件安装 工作台添加与工件安装 固定点焊焊枪支架模型创建与组装 固定点焊焊枪添加与配置 机器人远程TCP标定(核心内容) 远程TCP手动测试 远程TCP指令介绍 机器人仿真程序编写 机器人示教编程 机…...
代码审计必要性探讨
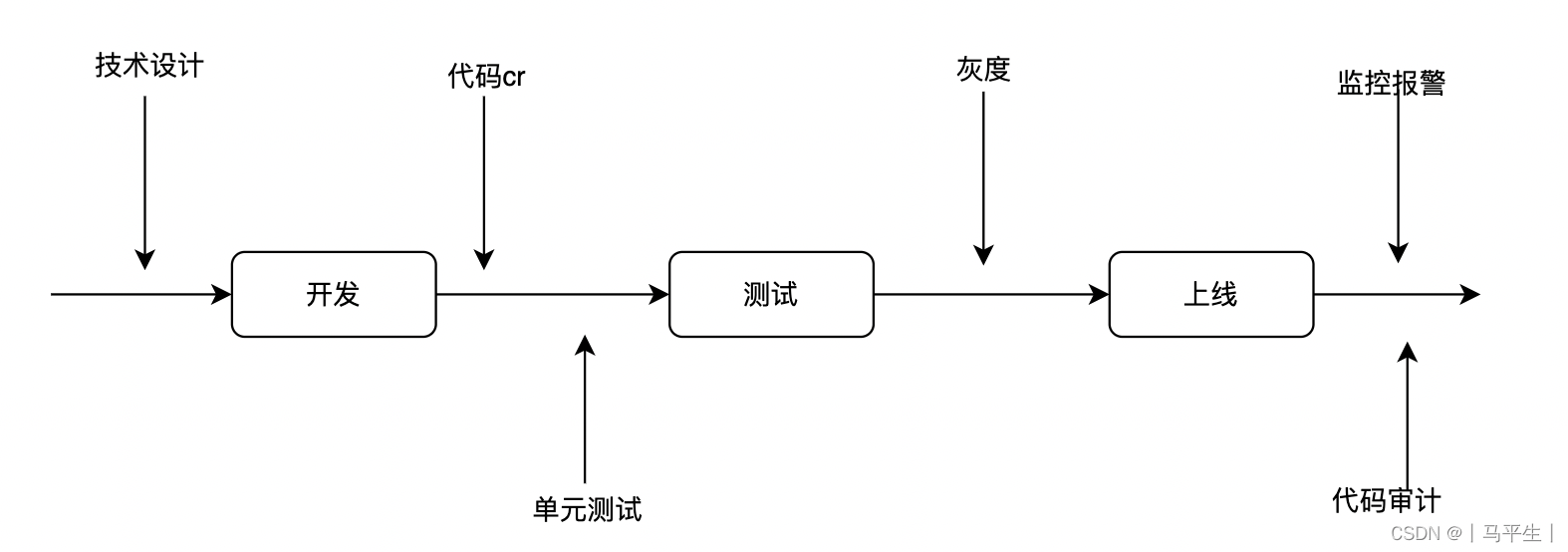
1、背景 为了保证代码的质量,需要一系列的流程来进行保证: 今天要探讨的是代码审计的必要性。 2、代码审计 代码审计的做法多种多样,我理解必须解决以下问题 ,才可能有效: 核心:审计的本质是对比&#…...

SpringBoot-Shiro
Apache Shiro:https://shiro.apache.org/ 依赖 <dependency><groupId>org.apache.shiro</groupId><artifactId>shiro-spring</artifactId><version>1.4.1</version> </dependency>ShiroConfig.java Configuratio…...
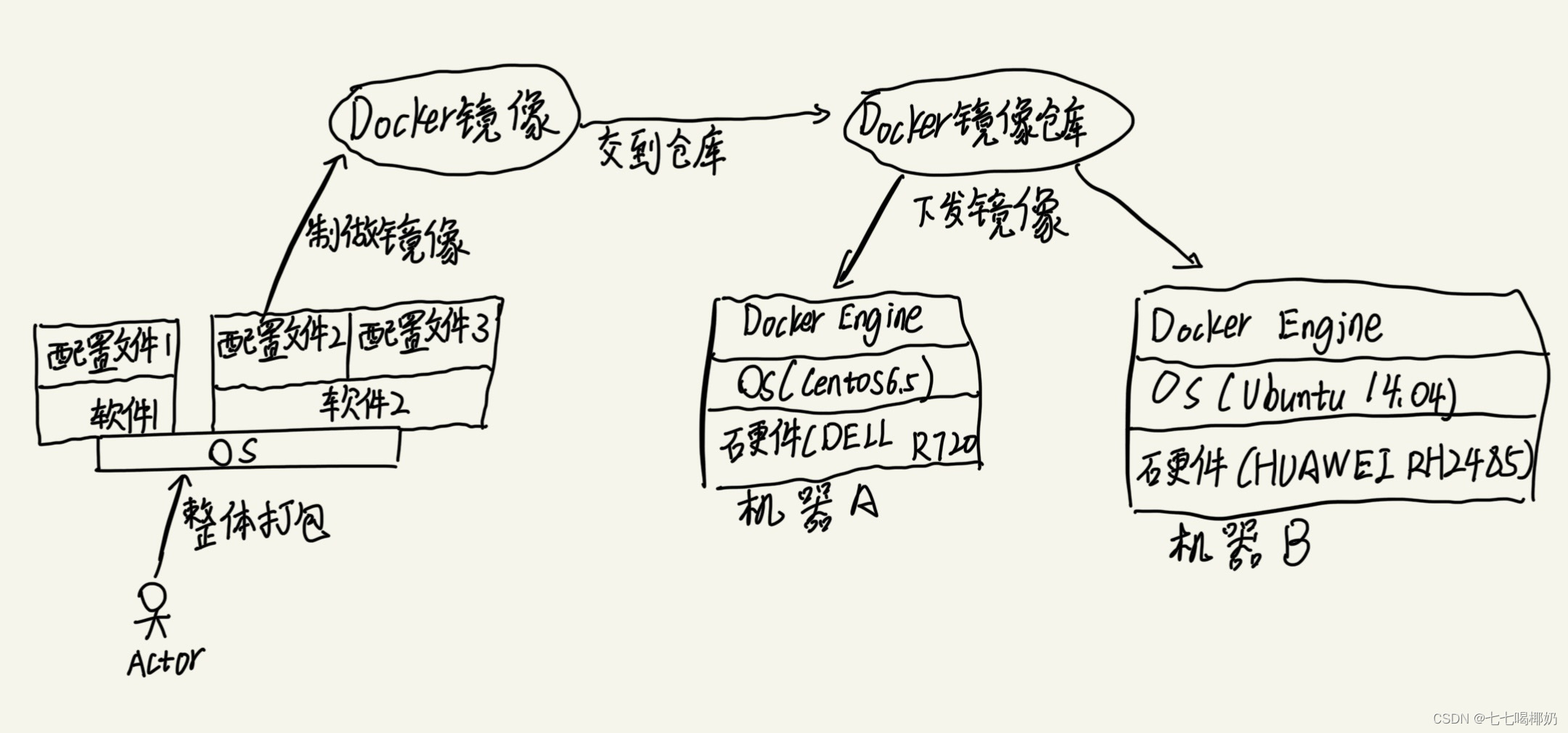
认识Docker
大家好,这里是七七,今天起开起我们的Docker技术篇,本文是介绍Docker的,不介绍如何使用和安装Docker,只是单纯的介绍Docker。 目录 一、历史 二、Docker究竟是什么 三、Docker的结构与特性 1、Docker仓库 2、Dock…...
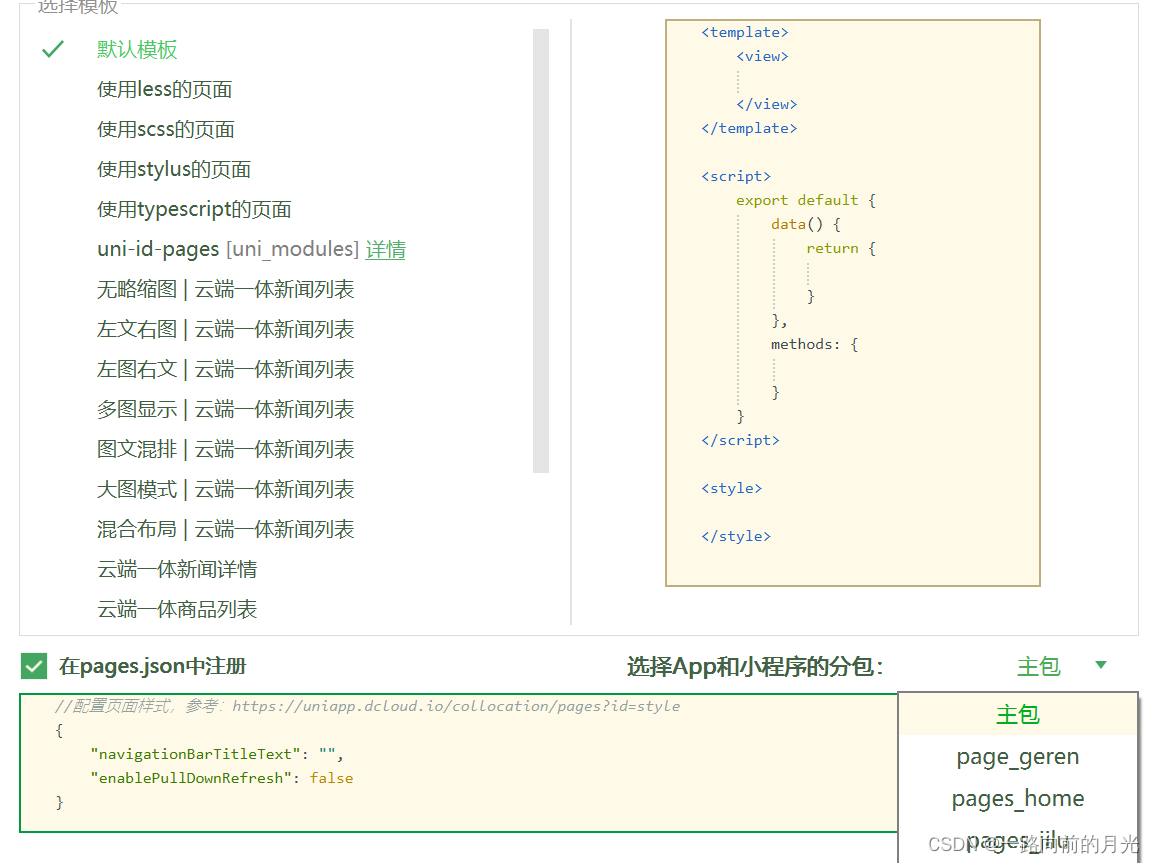
uniapp的分包使用记录
UniApp的分包是一种将应用代码划分为多个包的技术。分包的核心思想是将不同部分的代码划分为不同的包,按需加载,从而提高应用性能。使用UniApp的条件编译功能,开发人员可以根据需要将代码划分为多个包。每个包都包含一组页面和组件࿰…...
)
JSON.stringify()
一、定义 JSON.stringify() 是一个 JavaScript 内置函数,用于将 JavaScript 对象或值转换为 JSON 字符串 二、语法 JSON.stringify(value, replacer, space); value:要转换为 JSON 字符串的 JavaScript 对象或值。 eplacer(可选࿰…...

机器学习——损失函数
【说明】文章内容来自《机器学习——基于sklearn》,用于学习记录。若有争议联系删除。 1、简介 损失函数(loss function)又称为误差函数(error function),是衡量模型好坏的标准,用于估量模型的预测值与真实值的不一致程度,是一个…...
)
C#多线程(补充)
C#多线程(补充) C# 多线程的补充在C#中使用多线程1. Thread类2. 线程池3. Parallel类4. Task类启动任务接收任务的返回值同步调用指定连续任务任务的层次结构 5. BackgroundWorker控件 C# 多线程的补充 在C#中使用多线程 1. Thread类 使用Thread类通过…...
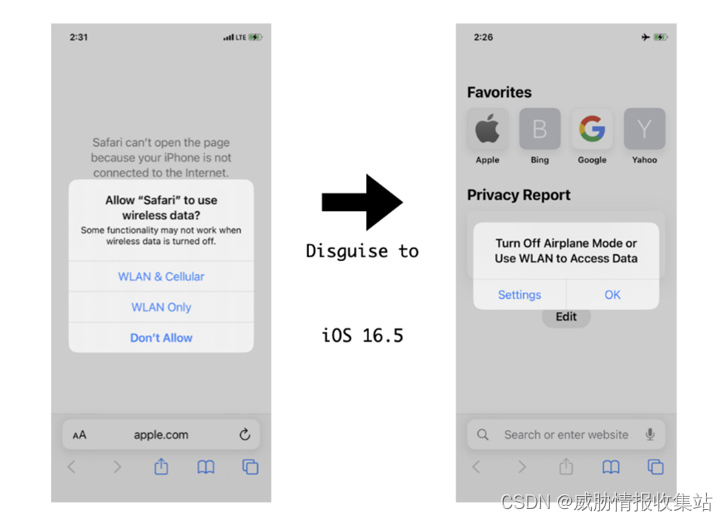
关于苹果iOS 16:揭开伪装成飞机模式的隐形蜂窝接入漏洞的动态情报
一、基本内容 在日常生活中,网络威胁不断演变,给个人和组织带来了一系列重大挑战。网络犯罪分子使用的一种最常见的、最具破坏性的方法之一就是网络钓鱼。这种攻击方式通过电子邮件、短信或其他通讯渠道冒充可信实体,诱使个人泄露敏感信息&am…...

Python+OpenCV 零基础学习笔记(4-5):计算机图形基础+Python相对文件路径+OpenCV图像+OpenCV视频
文章目录 相关链接运行环境前言计算机图形OpenCV简单使用图形读取文件读取可能会出现的问题:路径不对解决方案其它路径问题解决方案 图像显示保存OpenCV视频视频素材如何获取?简单视频读取 相关链接 【2022B站最好的OpenCV课程推荐】OpenCV从入门到实战 …...

【C++篇】讲解Vector容器的操作方法
文章目录 🍔vector容器概念🌹操作方法⭐赋值操作⭐容量和大小⭐插入和删除⭐数据存取 🍔vector容器概念 vector 是 C 标准库中的一个容器,它提供了一种动态数组的实现。vector 容器可以存储任意类型的元素,并且可以根…...

桥接模式-举例
概叙:桥接模式用一种巧妙的方式处理多层继承存在的问题, 用抽象关联取代了传统的多层继承, 将类之间的静态继承关系转换为动态的对象组合关系, 使得系统更加灵活,并易于扩展, 同时有效控制了系统中类的个数…...
记录)
FreeBSD下安装Jenkins(软件测试集成工具)记录
简要介绍Jenkins 简而言之,Jenkins 是领先的开源自动化服务器。它使用 Java 构建,提供了 1,800 多个插件来支持几乎任何事情的自动化,因此人类可以将时间花在机器无法完成的事情上。 主要目的: 持续、自动地构建/测试软件项目。…...
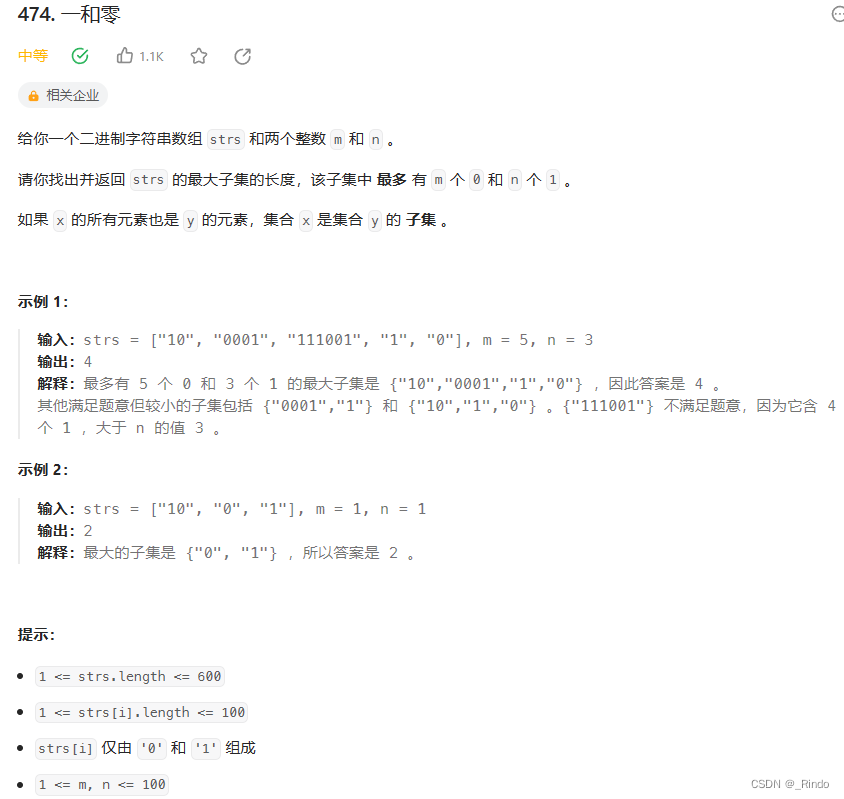
数据结构学习 Leetcode474 一和零
关键词:动态规划 01背包 一个套路: 01背包:空间优化之后dp【target1】,遍历的时候要逆序遍历完全背包:空间优化之后dp【target1】,遍历的时候要正序遍历 目录 题目: 思路: 复杂…...
VS配置PCO相机SDK环境
VS配置PCO相机SDK环境 概述:最近要用到一款PCO相机,需要协调其他部件实现一些独特的功能。因此需要用到PCO相机的SDK,并正确配置环境。良好的环境是成功的一半。其SDK可以在官网下载,选择对应版本的安装即可。这里用的是pco.cpp.1.2.0 Windows,VS 2022 专业版。 链接: P…...

六、Redis 分布式系统
六、Redis 分布式系统 六、Redis 分布式系统6.1 数据分区算法6.1.1 顺序分区6.1.2 哈希分区 6.2 系统搭建与运行6.2.1 系统搭建6.2.2 系统启动与关闭 6.3 集群操作6.3.1 连接集群6.3.2 写入数据6.3.3 集群查询6.3.4 故障转移6.3.5 集群扩容6.3.6 集群收缩 6.4 分布式系统的限制…...

Unity相机跟随角色移动
相机跟随角色移动 使用LateUpdate();方法,根据角色移动而进行跟随,固定角度,类似2.5D视角。 需要将相机放到一个空对象,将角度调节好,挂载组件,将角色对象放入组件中,调整moveTime设…...
Lua的垃圾回收机制详解
Lua 是一种轻量级的编程语言,广泛用于嵌入到其他应用程序中,尤其是在游戏开发领域。Lua 的内存管理机制采用了自动垃圾收集(Garbage Collection)的方法。以下是Lua内存管理的一些关键方面: 垃圾收集原理概述 Lua 使用…...
java设计模式学习之【解释器模式】
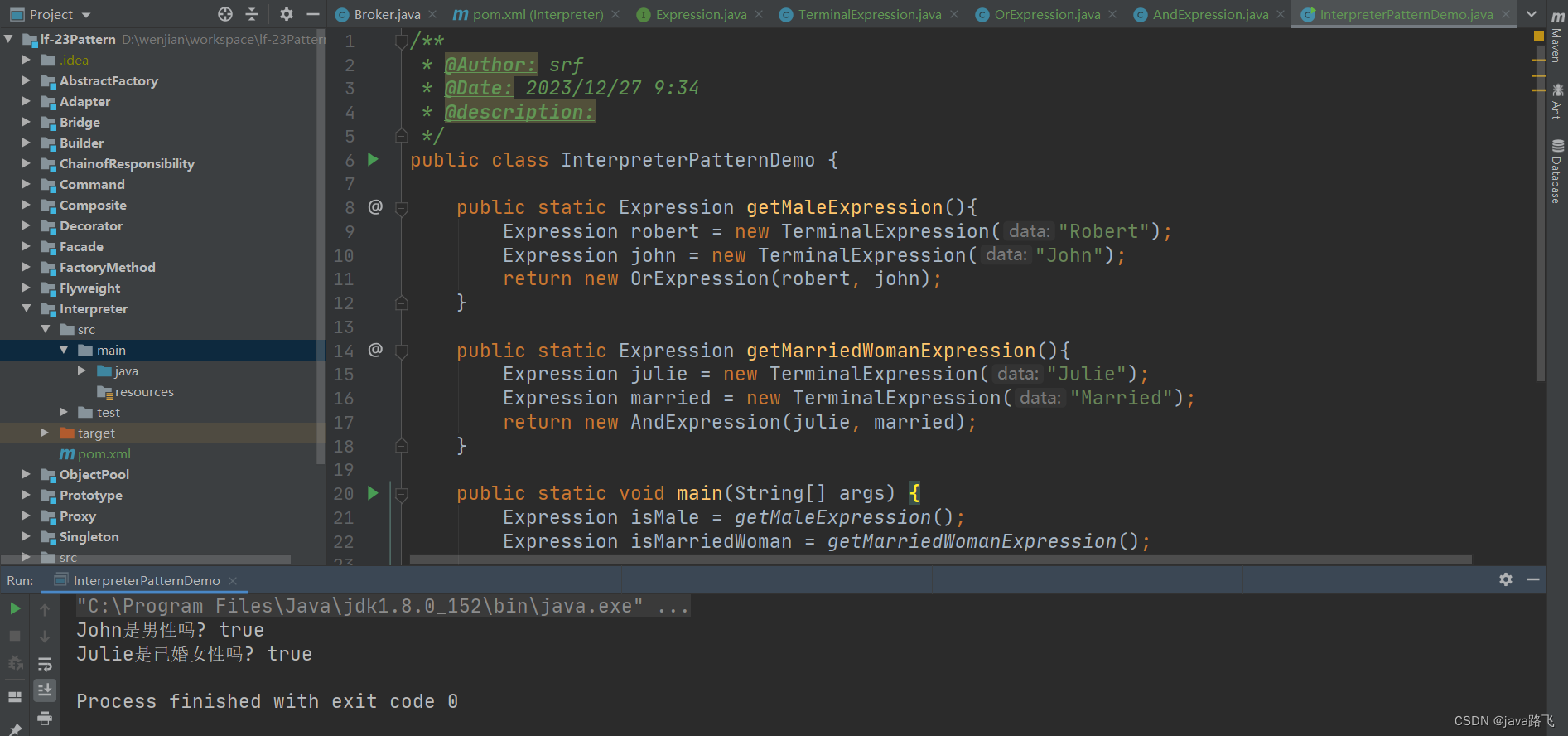
文章目录 引言解释器模式简介定义与用途实现方式 使用场景优势与劣势在Spring框架中的应用表达式解析示例代码地址 引言 在我们的日常生活中,语言的翻译和理解是沟通的关键。每种语言都有自己的语法规则,而翻译人员和计算机程序需要理解并遵循这些规则来…...

别再手动搬虚拟机了!手把手教你配置vSphere DRS集群,实现ESXi主机负载自动均衡
企业级虚拟化资源调度实战:vSphere DRS集群的智能配置与优化策略 虚拟化技术已成为现代企业IT基础设施的核心支柱,而资源的高效调度则是保障业务连续性和性能的关键。在传统虚拟化环境中,管理员往往需要手动监控主机负载并迁移虚拟机…...

如何高效下载B站视频:3分钟掌握智能下载工具完整指南
如何高效下载B站视频:3分钟掌握智能下载工具完整指南 【免费下载链接】BiliDownloader BiliDownloader是一款界面精简,操作简单且高速下载的b站下载器 项目地址: https://gitcode.com/gh_mirrors/bi/BiliDownloader 你是否曾经遇到过这样的情况&a…...

Mac视频预览终极指南:QuickLookVideo让你的Finder焕然一新
Mac视频预览终极指南:QuickLookVideo让你的Finder焕然一新 【免费下载链接】QuickLookVideo This package allows macOS Finder to display thumbnails, static QuickLook previews, cover art and metadata for most types of video files. 项目地址: https://gi…...

【亲测免费】 提升数据传输效率:AccessDatabaseEngine_X64 2010 安装包推荐
提升数据传输效率:AccessDatabaseEngine_X64 2010 安装包推荐 【下载地址】AccessDatabaseEngine_X642010安装包 本仓库提供了一个名为 AccessDatabaseEngine_X64_2010.rar 的资源文件下载。该文件是 Microsoft Access 2010 数据库引擎的可再发行程序包,…...

PlotSquared 终极指南:如何在 Minecraft 服务器上安装和配置强大的领地管理插件
PlotSquared 终极指南:如何在 Minecraft 服务器上安装和配置强大的领地管理插件 【免费下载链接】PlotSquared PlotSquared - Reinventing the plotworld 项目地址: https://gitcode.com/gh_mirrors/pl/PlotSquared PlotSquared 是一个功能强大的 Minecraft …...

LLaMA论文里没细说的三个“小”改进:RMSNorm、SwiGLU和RoPE到底强在哪?
LLaMA模型三大底层优化技术解析:RMSNorm、SwiGLU与RoPE的设计哲学 当大多数人关注大语言模型的参数量级时,LLaMA团队却在微观架构层面做了一系列精妙改进。这些看似微小的技术选择,实则是支撑模型高效运行的关键支柱。本文将带您深入LLaMA的&…...
与自定义轨道(Playable Track)的保姆级教程)
从零到精通:Unity Timeline信号(Signal)与自定义轨道(Playable Track)的保姆级教程
从零到精通:Unity Timeline信号与自定义轨道实战指南 在Unity中制作电影级过场动画时,Timeline无疑是开发者最强大的工具之一。但许多开发者仅仅停留在基础动画剪辑的层面,未能充分挖掘其深度交互潜力。本文将带您突破常规用法,探…...

MicMute:3秒掌握麦克风静音控制,告别会议尴尬时刻
MicMute:3秒掌握麦克风静音控制,告别会议尴尬时刻 【免费下载链接】MicMute Mute default mic clicking tray icon or shortcut 项目地址: https://gitcode.com/gh_mirrors/mi/MicMute 你是否曾在视频会议中因忘记静音而暴露尴尬的聊天背景声&…...

CH348芯片全平台驱动实战:从Windows Server到树莓派Linux,一次搞定8串口配置
CH348芯片全平台驱动实战:从Windows Server到树莓派Linux,一次搞定8串口配置 工业自动化、物联网网关、多设备调试等场景中,工程师常面临一个核心痛点:如何在各类操作系统环境下高效管理多串口设备。南京沁恒微电子的CH348芯片以其…...
的5个高效应用场景)
从模型验证到单元测试:PyTorch张量比较函数(allclose/isclose/eq/equal)的5个高效应用场景
从模型验证到单元测试:PyTorch张量比较函数的高效应用场景 在PyTorch项目中,张量比较是贯穿整个机器学习工作流的基础操作。无论是验证模型收敛性、调试自定义层,还是确保数据预处理一致性,选择恰当的比较函数能显著提升开发效率和…...