2023/12/21作业
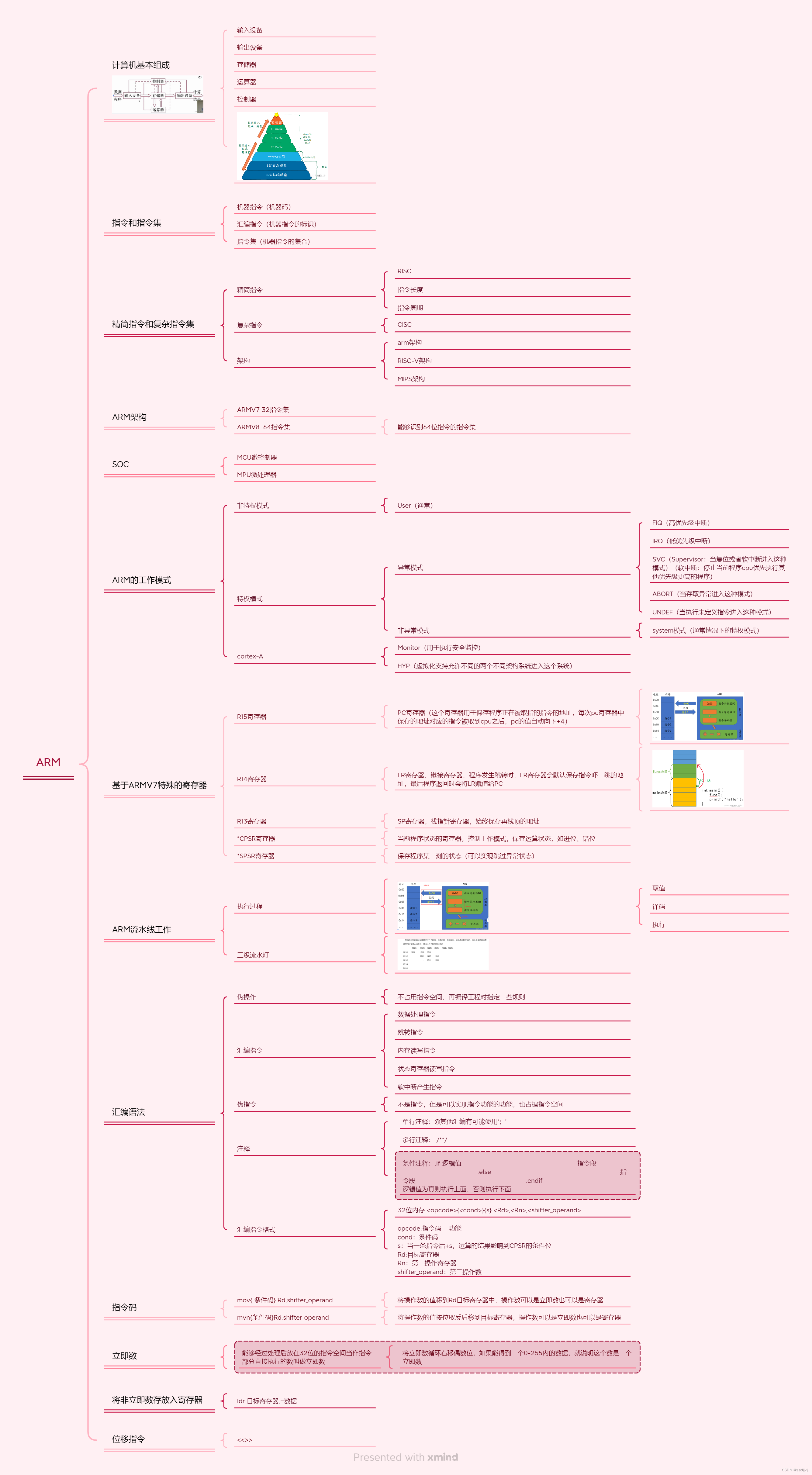
思维导图
代码
.text
.global _start
_start:
@灯1
@gpio时钟使能 [4]->1 0x5000A28
LDR R0,=0x50000A28 @指定寄存器地址
LDR R1,[R0]@将寄存器取出放到R1
ORR R1,R1,#(0x1<<4)@将第四位设置为1
STR R1,[R0]@读取R0寄存器到R1
@PE10为输出 [21:20]->01 0x50006000
LDR R0,=0X50006000
LDR R1,[R0]
BIC R1,R1,#(0x3<<20)
ORR R1,R1,#(0x1<<20)
STR R1,[R0]
@PE10为推挽输出[10]->0 0x50006004
LDR R0,=0X50006004
LDR R1,[R0]
BIC R1,R1,#(0x1<<10)
STR R1,[R0]
@PE10为低速输出 [21:20]->00 0x5006008
LDR R0,=0X50006008
LDR R1,[R0]
BIC R1,R1,#(0x3<<20)
STR R1,[R0]
@PE10为无上下拉电阻 [21:20]->00 0x500600c
LDR R0,=0X5000600c
LDR R1,[R0]
BIC R1,R1,#(0x3<<20)
STR R1,[R0]
@灯2
@gpio时钟使能 [4]->1 0x5000A28
LDR R0,=0x50000A28 @指定寄存器地址
LDR R1,[R0]@将寄存器取出放到R1
ORR R1,R1,#(0x1<<5)@将第五位设置为1
STR R1,[R0]@读取R0寄存器到R1
@PE10为输出 [21:20]->01 0x50007000
LDR R0,=0X50007000
LDR R1,[R0]
BIC R1,R1,#(0x3<<20)
ORR R1,R1,#(0x1<<20)
STR R1,[R0]
@PE10为推挽输出[10]->0 0x50007004
LDR R0,=0X50007004
LDR R1,[R0]
BIC R1,R1,#(0x1<<10)
STR R1,[R0]
@PE10为低速输出 [21:20]->00 0x5007008
LDR R0,=0X50007008
LDR R1,[R0]
BIC R1,R1,#(0x3<<20)
STR R1,[R0]
@PE10为无上下拉电阻 [21:20]->00 0x500700c
LDR R0,=0X5000700c
LDR R1,[R0]
BIC R1,R1,#(0x3<<20)
STR R1,[R0]
@灯3
@gpio时钟使能 [4]->1 0x5000A28
LDR R0,=0x50000A28 @指定寄存器地址
LDR R1,[R0]@将寄存器取出放到R1
ORR R1,R1,#(0x1<<4)@将第四位设置为1
STR R1,[R0]@读取R0寄存器到R1
@PE10为输出 [17:16]->01 0x50006000
LDR R0,=0X50006000
LDR R1,[R0]
BIC R1,R1,#(0x3<<16)
ORR R1,R1,#(0x1<<16)
STR R1,[R0]
@PE10为推挽输出[8]->0 0x50006004
LDR R0,=0X50006004
LDR R1,[R0]
BIC R1,R1,#(0x1<<8)
STR R1,[R0]
@PE10为低速输出 [17:16]->00 0x5006008
LDR R0,=0X50006008
LDR R1,[R0]
BIC R1,R1,#(0x3<<16)
STR R1,[R0]
@PE10为无上下拉电阻 [17:16]->00 0x500600c
LDR R0,=0X5000600c
LDR R1,[R0]
BIC R1,R1,#(0x3<<16)
STR R1,[R0]
flash:
bl led1_on
bl delay
bl led1_off
bl delay
bl led2_on
bl delay
bl led2_off
bl delay
bl led3_on
bl delay
bl led3_off
bl delay
bl led1_on
bl led2_on
bl led3_on
bl delay
bl led1_off
bl led2_off
bl led3_off
bl delay
b flash
@led1
led1_on:
@gpio[10]->1 0x50006014
LDR R0,=0X50006014
LDR R1,[R0]
ORR R1,R1,#(0x1<<10)
STR R1,[R0]
MOV PC,LR
led1_off:
@gpio[10]->0 0x50006014
LDR R0,=0X50006014
LDR R1,[R0]
BIC R1,R1,#(0x1<<10)
STR R1,[R0]
MOV PC,LR
@led2
led2_on:
@gpio[10]->1 0x50007014
LDR R0,=0X50007014
LDR R1,[R0]
ORR R1,R1,#(0x1<<10)
STR R1,[R0]
MOV PC,LR
led2_off:
@gpio[10]->0 0x50007014
LDR R0,=0X50007014
LDR R1,[R0]
BIC R1,R1,#(0x1<<10)
STR R1,[R0]
MOV PC,LR
@led3
led3_on:
@gpio[10]->1 0x50006014
LDR R0,=0X50006014
LDR R1,[R0]
ORR R1,R1,#(0x1<<8)
STR R1,[R0]
MOV PC,LR
led3_off:
@gpio[10]->0 0x50006014
LDR R0,=0X50006014
LDR R1,[R0]
BIC R1,R1,#(0x1<<8)
STR R1,[R0]
MOV PC,LR
delay:
LDR R3,=0X10000000
mm:
cmp r3,#0
subne r3,r3,#1
bne mm
mov pc,lr
.end
相关文章:
2023/12/21作业
思维导图 代码 .text .global _start _start: 灯1 gpio时钟使能 [4]->1 0x5000A28 LDR R0,0x50000A28 指定寄存器地址 LDR R1,[R0]将寄存器取出放到R1 ORR R1,R1,#(0x1<<4)将第四位设置为1 STR R1,[R0]读取R0寄存器到R1 PE…...
)
Python 数据类型 (2)
1 集合类型:一维数组的集合 List列表是一个有序且可变的集合。允许重复成员。 turple元组是一个有序且不可更改的集合。允许重复成员。 Set集合是一个无序且无索引的集合。没有重复的成员。 dict字典是一个有序*且可变的集合。没有重复的成员。 !&#x…...

【教程】自动检测和安装Python脚本依赖的第三方库
转载请注明出处:小锋学长生活大爆炸[xfxuezhang.cn] 背景说明 对于新python环境,要运行某个脚本,可能需要安装很多库,一般可以通过提供的requirements.txt来自动安装。但如果没有这个txt,那就得手动一个一个安装&#…...
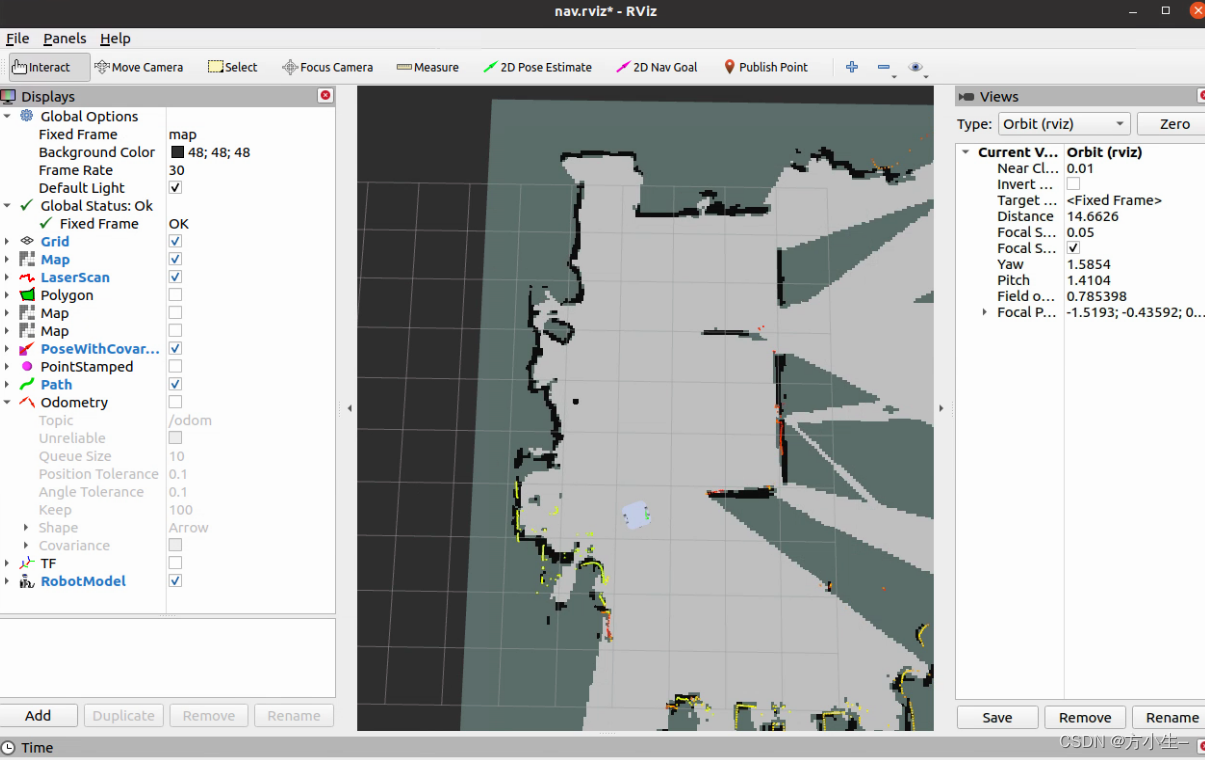
0开始配置Cartographer建图和导航定位
0开始配置Cartographer 日期:12-19 硬件:激光雷达IMU 小车的tf变换: 建图配置 lua文件配置:my_robot.lua include "map_builder.lua" include "trajectory_builder.lua"options {map_builder MAP_BUILDE…...

Python中使用SQLite数据库的方法2-2
3.3.2 创建表单及字段 通过“3.2 创建Cursor类的对象”中创建的Cursor类的对象cur创建表单及字段,代码如图5所示。 图5 创建表单及字段 从图5中可以看出,通过Cursor类的对象cur调用了Cursor类的execute()方法来执行SQL语句。该方法的参数即为要指定的S…...
零代码也能玩出花:Mugeda在H5设计中的魔法力量
文章目录 一、Mugeda零代码可视化H5设计工具简介二、Mugeda零代码可视化H5设计实战案例1. 注册并登录Mugeda账号2. 选择模板3. 编辑页面内容4. 添加动画效果5. 预览和发布 三、Mugeda零代码可视化H5设计的优势《Mugeda零代码可视化H5设计实战》内容简介作者简介目录前言/序言 随…...
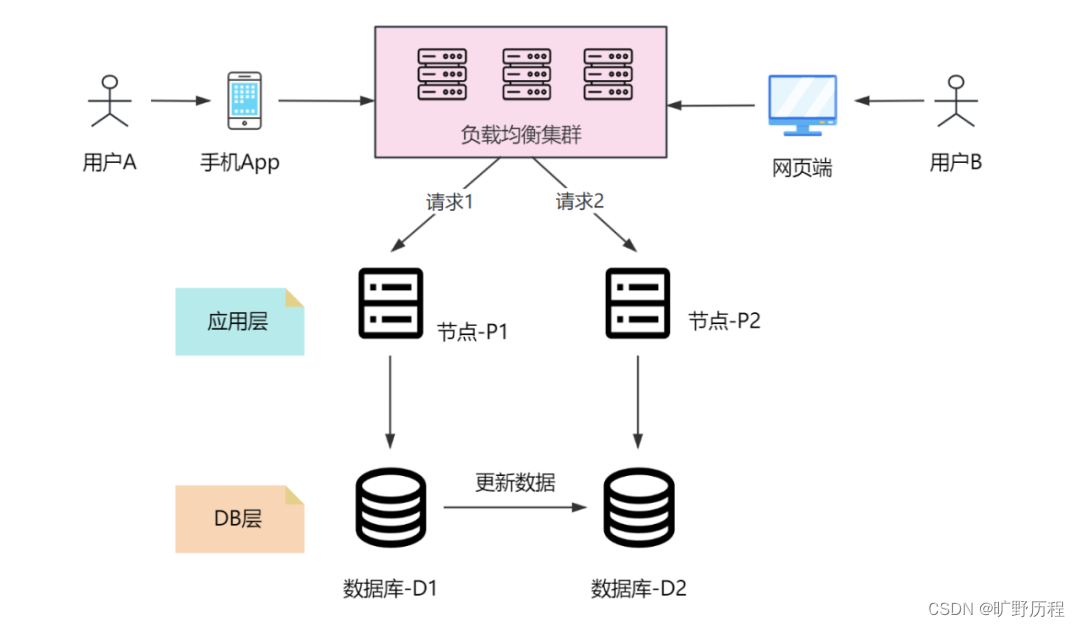
分布式、CAP 和 BASE 理论
在计算机科学领域,分布式系统是一门极具挑战性的研究方向,也是互联网应用中必不可少的优化实践,而 CAP 理论和 BASE 理论则是分布式系统中的两个关键的概念。 什么是分布式系统 首先,让我们来谈谈分布式系统。你可以将分布式系统…...

django之drf框架(两个视图基类、5个扩展视图类、9个视图子类)
两个视图基类 APIView和GenericAPIView drf提供的最顶层的父类就是APIView,以后所有的类都继承自他 GenericAPIView继承自APIView,他里面封装了一些工能 基于APIViewModelSerializerResposne写5个接口 子路由:app01>>>urls.py …...

23种设计模式学习
设计模式的分类 总体来说设计模式分为三大类: 创建型模式,共五种:工厂方法模式、抽象工厂模式、单例模式、建造者模式、原型模式。 结构型模式,共七种:适配器模式、装饰器模式、代理模式、外观模式、桥接模式、组合…...

php 8.4 xdebug扩展编译安装方法
最新版php8.4 xdebug扩展只能通过编译方式安装, pecl是安装不了的, 编译方法如下 下载最新版xdebug git clone https://github.com/xdebug/xdebug.git 却换入xdebug目录执行编译安装xdebug cd xdebug phpize./configure --enable-xdebugmakemake install3. 配置启用xdebug 这…...

66biolinks v42.0.0 已注册 – 生物短链接、URL 缩短器、QR 码和 Web 工具 (SAAS) 源码
66biolinks v42.0.0:全能生物短链接与网络工具平台 一、开篇介绍 66biolinks v42.0.0是一款集生物链接、URL缩短器、二维码和网络工具于一体的综合性软件解决方案。作为社交生物链接平台的佼佼者,66biolinks提供了全方位的功能,旨在满足用户…...

《Vue2.X 进阶知识点》- 防 ElementUI Divider 分割线
前言 使用 el-divider 背景为白色是没问题的。 但当背景换成其它颜色,问题就出现了!! 仔细看原来是两层,默认背景色是白色。 想着把背景色改为透明应该能用,结果发现背面是一条实线,难怪要用白色遮挡…不符…...

【第十二课】KMP算法(acwing-831 / c++代码 / 思路 / 视频+博客讲解推荐)
目录 暴力做法 代码如下 KMP算法 不同的next求法-----视频讲解/博客推荐 视频推荐 博客推荐 课本上的方法- prefix的方法- 求next数组思路---next数组存放前缀表的方式 s和p匹配思路 代码如下 暴力做法 遍历s主串中每一个元素,如果该元素等于模板串p中…...

JSON 简介
JSON是什么?(了解) JSON(JavaScript Object Notation)是一种轻量级的数据交换格式,常用于Web应用程序之间的数据传输。 JSON格式是一种文本格式,用于描述数据的结构和内容。它由两种基本元素组成:键值对和…...

Impala4.x源码阅读笔记(三)——Impala如何管理Iceberg表元数据
前言 本文为笔者个人阅读Apache Impala源码时的笔记,仅代表我个人对代码的理解,个人水平有限,文章可能存在理解错误、遗漏或者过时之处。如果有任何错误或者有更好的见解,欢迎指正。 上一篇文章Impala4.x源码阅读笔记࿰…...

Ubuntu2204配置samba
0.前情说明 samba服务器主要是用来局域网共享文件的,如果想公网共享可能行不通,我已经踩坑一天了 所以说如果你想满足公网samba共享你就可以不要看下去了 1.参考连接 Ubuntu 安装 Samba 服务器_ubuntu安装samba服务器-CSDN博客 2.安装samba服务 sud…...
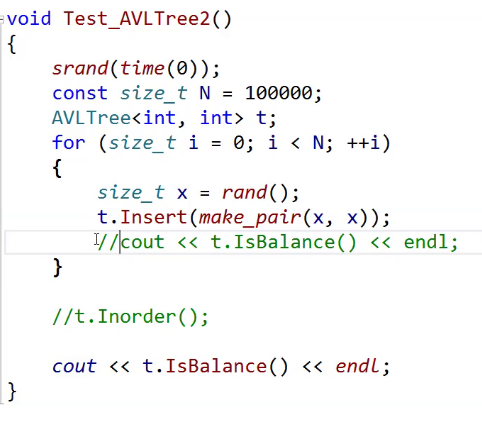
AVL树(超详解)
文章目录 前言AVL树的概念AVL树的实现定义AVL树insert 单旋左单旋右单旋左单旋代码右单旋代码 双旋左右双旋右左双旋 测试AVL树的性能 前言 AVL树是怎么来的呢? 我们知道搜索二叉树会存在退化问题,退化以后就变成单支或者接近单支。 它的效率就变成O(N)…...

禁止浏览器记住密码和自动填充 element-ui+vue
vue 根据element-ui 自定义密码输入框,防止浏览器 记住密码和自动填充 <template><divclass"el-password el-input":class"[size ? el-input-- size : , { is-disabled: disabled }]"><inputclass"el-input__inner"…...
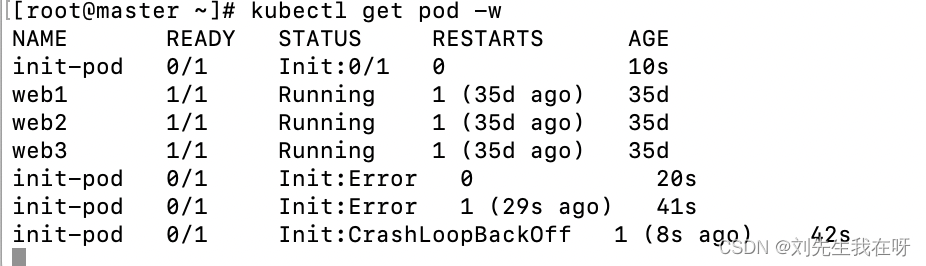
K8s实战-init容器
概念: 初始化容器的概念 比如一个容器A依赖其他容器,可以为A设置多个 依赖容易A1,A2,A3 A1,A2,A3要按照顺序启动,A1没有启动启动起来的 话,A2,A3是不会启动的,直到所有的静态容器全 部启动完毕…...

Vue3.2 自定义指令详解与实战
一、介绍 在Vue3中,自定义指令为开发者提供了一种灵活的方式来扩展Vue的HTML模板语法,使其能够执行特定的DOM操作或组件逻辑。不同于Vue2.x中的全局和局部指令注册方式,Vue3引入了Composition API,这使得自定义指令的编写和使用更…...

VSCode + Cline + Codeium + OpenSpec + DeepSeek 完整配置指南
VSCode Cline Codeium OpenSpec DeepSeek 完整配置指南 📋 最终方案概述 组件用途费用VSCode代码编辑器免费Codeium (Windsurf)Tab 补全 生成注释免费ClineAI Agent(复杂任务、多文件操作)免费OpenSpec规范驱动开发(复杂功…...

Swarmocracy:基于蜂群智能的分布式组织决策模拟实践
1. 项目概述:当开源项目遇上“蜂群民主”最近在开源社区里闲逛,发现一个挺有意思的项目,叫“Swarmocracy”。光看名字,就能嗅到一股混合了技术极客与组织社会学的味道——“Swarm”(蜂群)加上“-cracy”&am…...
)
从‘能用’到‘优雅’:Python函数设计的3个坏味道与5个重构技巧(附代码对比)
从‘能用’到‘优雅’:Python函数设计的3个坏味道与5个重构技巧(附代码对比) 在Python开发中,函数是最基本的代码组织单元。许多开发者能够快速实现功能,却往往忽视了函数设计的质量。本文将揭示三种典型的函数设计&qu…...

故障排查实录:i40e网卡队列超时引发的虚拟机网络中断
1. 故障现象与初步排查 那天早上刚到办公室,就接到业务部门的紧急电话:"虚拟机上的Web服务突然无法访问了!"作为运维工程师,这种网络中断的报修电话总是让人心头一紧。我立即登录到KVM宿主机,发现两台虚拟机…...

戴尔G15终极散热解决方案:TCC-G15完整使用指南
戴尔G15终极散热解决方案:TCC-G15完整使用指南 【免费下载链接】tcc-g15 Thermal Control Center for Dell G15 - open source alternative to AWCC 项目地址: https://gitcode.com/gh_mirrors/tc/tcc-g15 还在为戴尔G15笔记本的高温问题而烦恼吗?…...

XMly-Downloader-Qt5:跨平台喜马拉雅音频下载解决方案的技术重构与实现深度解析
XMly-Downloader-Qt5:跨平台喜马拉雅音频下载解决方案的技术重构与实现深度解析 【免费下载链接】xmly-downloader-qt5 喜马拉雅FM专辑下载器. 支持VIP与付费专辑. 使用GoQt5编写(Not Qt Binding). 项目地址: https://gitcode.com/gh_mirrors/xm/xmly-downloader-…...

医疗电源设计:IEC 60601-1标准与EMC挑战解析
1. IEC 60601-1标准演进与医疗电源设计挑战医疗电气设备的安全性和可靠性直接关系到患者生命健康,这使得相关设计标准比普通电子设备严格得多。作为医疗设备领域的"圣经",IEC 60601-1标准自1977年首次发布以来,已经历四次重大修订&…...

不止于校验:用HashMyFiles命令行玩转文件批量管理与VirusTotal联动
从本地到云端:HashMyFiles命令行与VirusTotal联动的安全自动化实践 在数字化时代,文件完整性校验和安全检测已成为IT运维、安全分析乃至日常开发中不可或缺的环节。传统图形界面工具虽然直观,但在处理大批量文件或需要自动化集成的场景下显得…...

LaTeX2Word-Equation:3分钟实现网页公式到Word的无缝迁移
LaTeX2Word-Equation:3分钟实现网页公式到Word的无缝迁移 【免费下载链接】LaTeX2Word-Equation Copy LaTeX Equations as Word Equations, a Chrome Extension 项目地址: https://gitcode.com/gh_mirrors/la/LaTeX2Word-Equation LaTeX2Word-Equation是一款…...

为什么顶尖投行/律所/药企已将Perplexity设为默认搜索端口?:拆解其底层Provenance Graph引擎与ChatGPT RAG架构的7层信任差
更多请点击: https://intelliparadigm.com 第一章:Perplexity与ChatGPT搜索范式的根本性分野 Perplexity 和 ChatGPT 代表两种截然不同的信息交互哲学:前者以**可验证的溯源驱动**为核心,后者以**生成连贯性优先**为设计原则。这…...