三角函数两角和差公式推导
一.几何推理
1.两角和公式
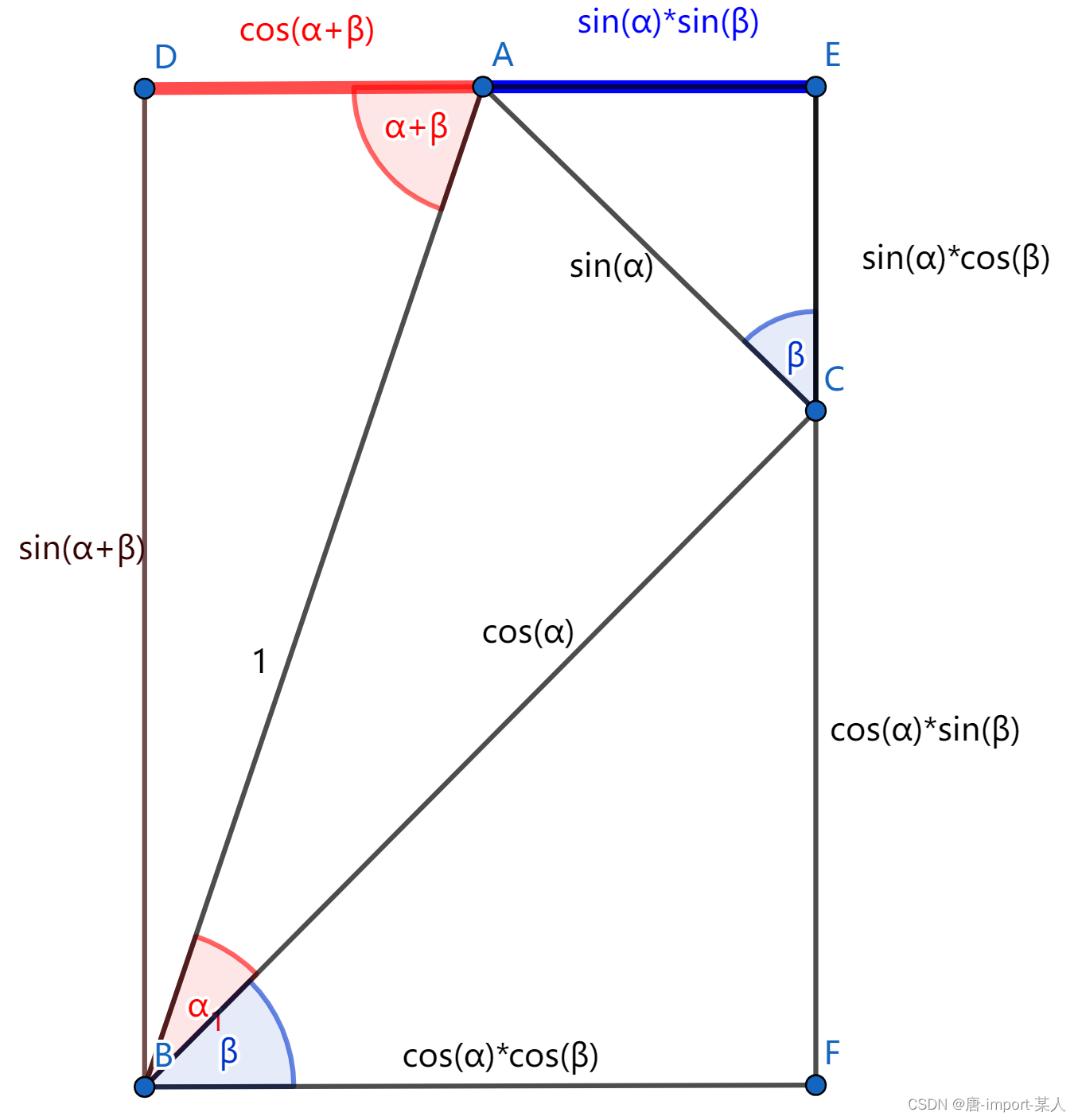
做一斜边为1的直角△ABC,任意旋转非 k Π , k = N kΠ,k=N kΠ,k=N,补充如图,令 ∠ A B C = ∠ α , ∠ C B F = ∠ β ∠ABC=∠α,∠CBF=∠β ∠ABC=∠α,∠CBF=∠β
∴ ∠ D B F = ∠ D B A + ∠ α + ∠ β = 90 ° , ∠ D A F = ∠ D B A + ∠ D A B ∴∠DBF=∠DBA+∠α+∠β=90°,∠DAF=∠DBA+∠DAB ∴∠DBF=∠DBA+∠α+∠β=90°,∠DAF=∠DBA+∠DAB
∵ ∠ D A B = ∠ α + ∠ β ∵∠DAB=∠α+∠β ∵∠DAB=∠α+∠β
∴ ∠ A C F + ∠ B C F = 90 ° ∴∠ACF+∠BCF=90° ∴∠ACF+∠BCF=90°
∵ ∠ A C F = ∠ β ∵∠ACF=∠β ∵∠ACF=∠β
∴ A B 长度为 1 ∴AB长度为1 ∴AB长度为1
∵ A C = s i n ( α ) , B C = c o s ( α ) ∵AC=sin(α),BC=cos(α) ∵AC=sin(α),BC=cos(α)
∵ B F = c o s ( α ) ∗ c o s ( β ) , C F = c o s ( α ) ∗ s i n ( β ) , A E = s i n ( α ) s i n ( β ) , C E = s i n ( α ) c o s ( β ) , B D = E F = s i n ( α + β ) , D A = c o s ( α + β ) ∵BF=cos(α)*cos(β),CF=cos(α)*sin(β),AE=sin(α)sin(β),CE=sin(α)cos(β),BD=EF=sin(α+β),DA=cos(α+β) ∵BF=cos(α)∗cos(β),CF=cos(α)∗sin(β),AE=sin(α)sin(β),CE=sin(α)cos(β),BD=EF=sin(α+β),DA=cos(α+β)
∵ { c o s ( α + β ) = c o s ( α ) ∗ c o s ( β ) − s i n ( α ) ∗ s i n ( β ) s i n ( α + β ) = s i n ( α ) ∗ c o s ( β ) + c o s ( α ) ∗ s i n ( β ) ∵\begin{cases} cos(α+β)=cos(α)*cos(β)-sin(α)*sin(β) \\sin(α+β)=sin(α)*cos(β)+cos(α)*sin(β) \end{cases} ∵{cos(α+β)=cos(α)∗cos(β)−sin(α)∗sin(β)sin(α+β)=sin(α)∗cos(β)+cos(α)∗sin(β)
2.两角差公式
∵ { c o s ( α + β ) = c o s ( α ) ∗ c o s ( β ) − s i n ( α ) ∗ s i n ( β ) s i n ( α + β ) = s i n ( α ) ∗ c o s ( β ) + c o s ( α ) ∗ s i n ( β ) ∵\begin{cases} cos(α+β)=cos(α)*cos(β)-sin(α)*sin(β) \\sin(α+β)=sin(α)*cos(β)+cos(α)*sin(β) \end{cases} ∵{cos(α+β)=cos(α)∗cos(β)−sin(α)∗sin(β)sin(α+β)=sin(α)∗cos(β)+cos(α)∗sin(β)
对 ∠ β 做取反变化 对∠β做取反变化 对∠β做取反变化
∵ { c o s ( α + ( − β ) ) = c o s ( α ) ∗ c o s ( β ) − s i n ( α ) ∗ ( − s i n ( β ) ) s i n ( α + ( − β ) ) = s i n ( α ) ∗ c o s ( β ) + c o s ( α ) ∗ ( − s i n ( β ) ) ∵\begin{cases} cos(α+(-β))=cos(α)*cos(β)-sin(α)*(-sin(β)) \\sin(α+(-β))=sin(α)*cos(β)+cos(α)*(-sin(β)) \end{cases} ∵{cos(α+(−β))=cos(α)∗cos(β)−sin(α)∗(−sin(β))sin(α+(−β))=sin(α)∗cos(β)+cos(α)∗(−sin(β))
∵ { c o s ( α − β ) = s i n ( α ) ∗ s i n ( β ) + c o s ( α ) ∗ s i n ( β ) s i n ( α − β ) = s i n ( α ) ∗ c o s ( β ) − c o s ( α ) ∗ s i n ( β ) ∵\begin{cases} cos(α-β)=sin(α)*sin(β)+cos(α)*sin(β) \\sin(α-β)=sin(α)*cos(β)-cos(α)*sin(β) \end{cases} ∵{cos(α−β)=sin(α)∗sin(β)+cos(α)∗sin(β)sin(α−β)=sin(α)∗cos(β)−cos(α)∗sin(β)
3.总结
∵ { c o s ( α + β ) = c o s ( α ) ∗ c o s ( β ) − s i n ( α ) ∗ s i n ( β ) s i n ( α + β ) = s i n ( α ) ∗ c o s ( β ) + c o s ( α ) ∗ s i n ( β ) c o s ( α − β ) = s i n ( α ) ∗ s i n ( β ) + c o s ( α ) ∗ s i n ( β ) s i n ( α − β ) = s i n ( α ) ∗ c o s ( β ) − c o s ( α ) ∗ s i n ( β ) ∵\begin{cases} cos(α+β)=cos(α)*cos(β)-sin(α)*sin(β) \\sin(α+β)=sin(α)*cos(β)+cos(α)*sin(β) \\cos(α-β)=sin(α)*sin(β)+cos(α)*sin(β) \\sin(α-β)=sin(α)*cos(β)-cos(α)*sin(β) \end{cases} ∵⎩ ⎨ ⎧cos(α+β)=cos(α)∗cos(β)−sin(α)∗sin(β)sin(α+β)=sin(α)∗cos(β)+cos(α)∗sin(β)cos(α−β)=sin(α)∗sin(β)+cos(α)∗sin(β)sin(α−β)=sin(α)∗cos(β)−cos(α)∗sin(β)
4.其他
为什么几何推理∠β和∠α不是钝角,根据诱导公式可将钝角化为锐角。所以只推导锐角和可以等价于推导任意角和
相关文章:
三角函数两角和差公式推导
一.几何推理 1.两角和公式 做一斜边为1的直角△ABC,任意旋转非 k Π , k N kΠ,kN kΠ,kN,补充如图,令 ∠ A B C ∠ α , ∠ C B F ∠ β ∠ABC∠α,∠CBF∠β ∠ABC∠α,∠CBF∠β ∴ ∠ D B F ∠ D B A ∠ α ∠ β 90 , ∠ D A …...
HarmonyOS page生命周期函数讲解
下面 我们又要看一个比较重要的点了 页面生命周期 页面组件有三个生命周期 onPageShow 页面显示时触发 onPageHide 页面隐藏时触发 onBackPress 页面返回时触发 这里 我们准备两个组件 首先是 index.ets 参考代码如下 import router from ohos.router Entry Component struc…...
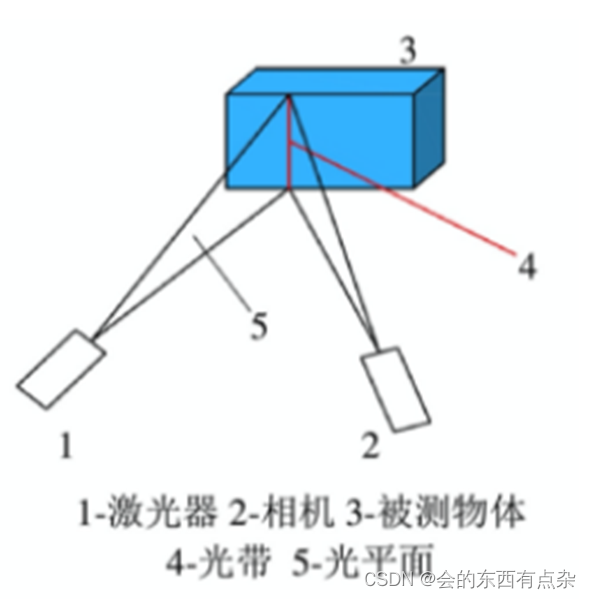
3D视觉-结构光测量-线结构光测量
概述 线结构光测量中,由激光器射出的激光光束透过柱面透镜扩束,再经过准直,产生一束片状光。这片光束像刀刃一样横切在待测物体表面,因此线结构光法又被成为光切法。线结构光测量常采用二维面阵 CCD 作为接受器件,因此…...

ssm基于web的马病管理系统设计与实现+jsp论文
摘 要 传统信息的管理大部分依赖于管理人员的手工登记与管理,然而,随着近些年信息技术的迅猛发展,让许多比较老套的信息管理模式进行了更新迭代,马病信息因为其管理内容繁杂,管理数量繁多导致手工进行处理不能满足广大…...

SaaS版Java基层健康卫生云HIS信息管理平台源码(springboot)
云his系统源码,系统采用主流成熟技术开发,B/S架构,软件结构简洁、代码规范易阅读,SaaS应用,全浏览器访问,前后端分离,多服务协同,服务可拆分,功能易扩展。多集团统一登录…...
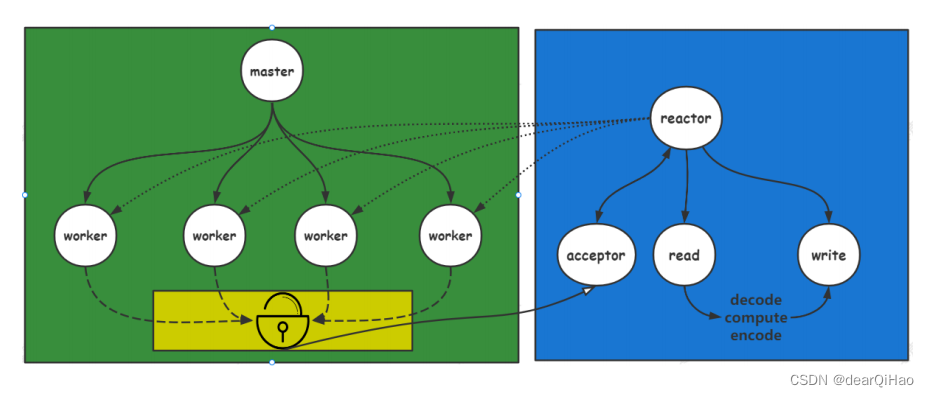
redis,memcached,nginx网络组件,网络编程——reactor的应用
目录 目标网络编程关注的问题连接的建立连接的断开消息的到达消息发送完毕 网络 IO 职责检测 IO检测 io剖析 操作 IO 阻塞IO 和 非阻塞IOIO 多路复用epoll结构以及接口 reactor编程连接建立连接断开数据到达数据发送完毕 reactor 应用:后续补充源码解析单 reacrtor多…...
)
【机电、机器人方向会议征稿|不限专业|见刊快】2024年机械、 图像与机器人国际会议(IACMIR 2024)
【机电、机器人方向会议征稿|不限专业|见刊快】2024年机械、 图像与机器人国际会议(IACMIR 2024) 2024 International Academic Conference on Machinery, Images, and Robotics 会议将聚焦“机械、成像和机器人”相关的最新研究领域,为国内…...

uniapp学习之路
uniapp 学习之路 1. 下载HBuilderX2. 下载uView初始框架3. 开始学习1.更改页面背景色,渐变色 1. 下载HBuilderX https://www.dcloud.io/hbuilderx.html?ivk_sa1024320u2. 下载uView初始框架 https://ext.dcloud.net.cn/plugin?id15933. 开始学习 1.更改页面背景…...
移动开发新的风口?Harmony4.0鸿蒙应用开发基础+实践案例
前段时间鸿蒙4.0引发了很多讨论,不少业内人士认为,鸿蒙将与iOS、安卓鼎足而三了。 事实上,从如今手机操作系统竞赛中不难看出,安卓与iOS的形态、功能逐渐趋同化,两大系统互相取长补短,综合性能等差距越来越…...
QT上位机开发(倒计时软件)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 倒计时软件是生活中经常遇到的一种场景。比如运动跑步,比如学校考试,比如论文答辩等等,只要有时间限制规定的地…...
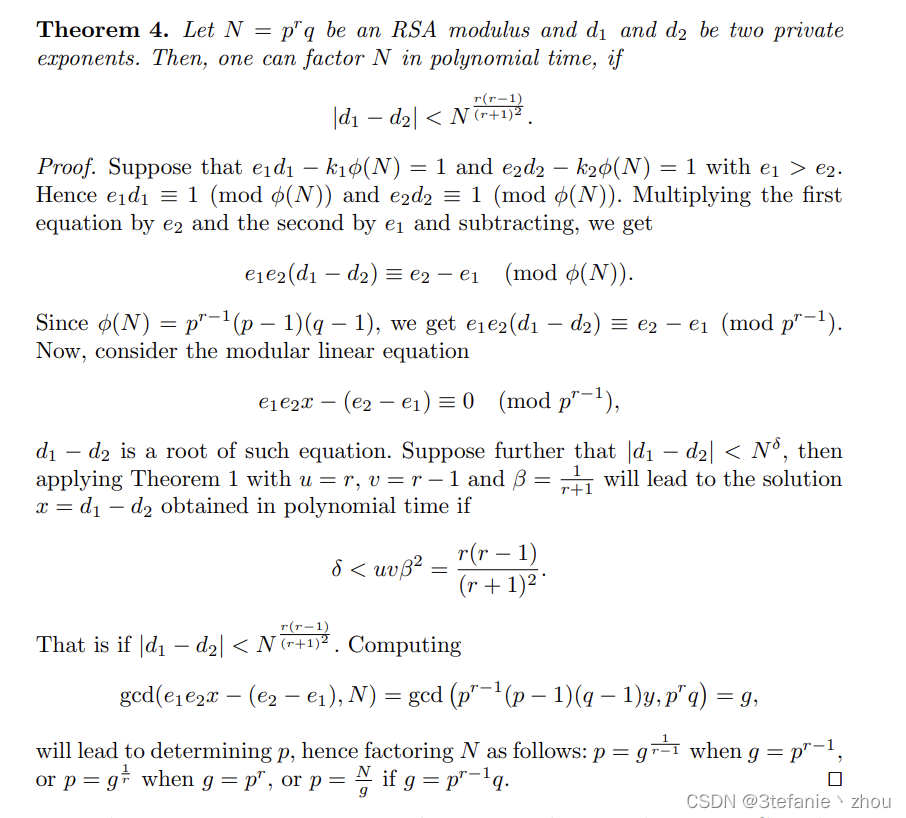
2023 楚慧杯 --- Crypto wp
文章目录 初赛so large e 决赛JIGE 初赛 so large e 题目: from Crypto.Util.number import * from Crypto.PublicKey import RSA from flag import flag import randomm bytes_to_long(flag)p getPrime(512) q getPrime(512) n p*q e random.getrandbits(1…...
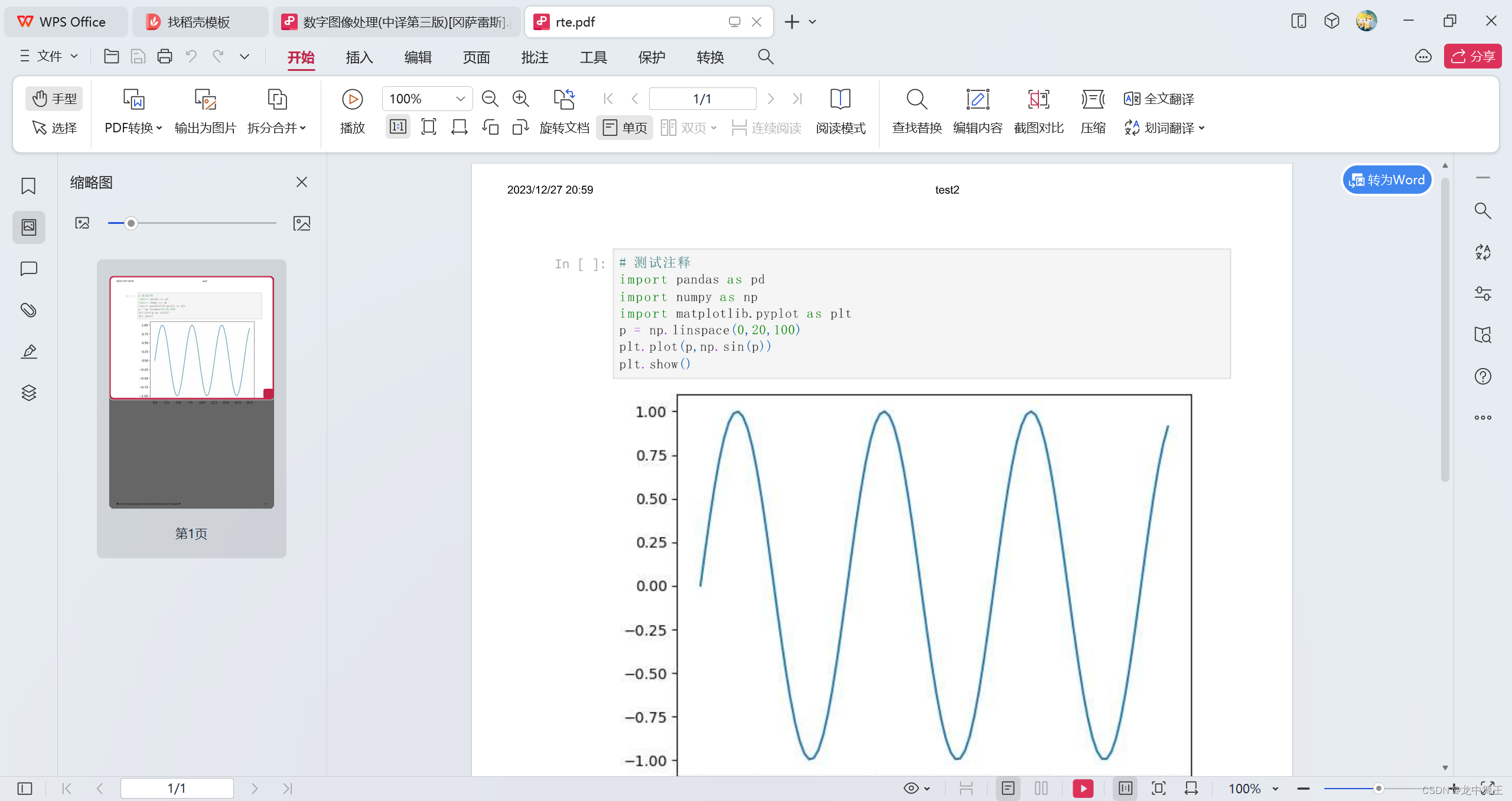
Python+OpenCV 零基础学习笔记(1-3):anaconda+vscode+jupyter环境配置
文章目录 前言相关链接环境配置:AnacondaPython配置OpenCVOpencv-contrib:Opencv扩展 Notebook:python代码笔记vscode配置配置AnacondaJupyter文件导出 前言 作为一个C# 上位机,我认为上位机的终点就是机器视觉运动控制。最近学了会Halcon发现机器视觉还…...
Spring Cloud Gateway 常见过滤器的基本使用
目录 1. 过滤器的作用 2. Spring Cloud Gateway 过滤器的类型 2.1 内置过滤器 2.1.1 AddResponseHeader 2.1.2 AddRequestHeader 2.1.3 PrefixPath 2.1.4 RequestRateLimiter 2.1.5 Retry 2.2 自定义过滤器 1. 过滤器的作用 过滤器通常用于拦截、处理或修改数据流和事…...

maven依赖无法传递问题排查
一、背景 在A模块中引入B模块,C服务引入A模块但是B模块没有传递进来。 二、排查 使用mvn clean install -Dmaven.test.skiptrue查看打包日志信息,通过搜索A模块名称,出现如下警告信息: [WARING] The POM for A:jar:0.0.1-SNAP…...

JVM钩子
JVM钩子 简介 在Java应用程序中,可以通过注册关闭钩子(Shutdown Hook)函数来实现在JVM关闭时执行特定的代码。关闭钩子是一种用于在JVM关闭时执行清理任务的机制,它允许开发者在JVM关闭之前执行一些必要的清理工作,如…...

linux cat命令增加-f显示文件名功能
在使用cat命令配合grep批量搜索文件内容时,我仅仅能知道是否搜索到,不知道是在哪个文件里找到的。比如cat ./src/*.c | grep full_write,在src目录下的所有.c文件里找full_write,能匹配到所有的full_write,但是不知道它们分别在哪些文件里。于…...

linux更改登录shell
从bash修改成python 在/etc/passwd下可以更改用户登录bash 例 root:x:0:0:root:/root:/bin/bash //更改bin/bash为/bin/python,就可以用root登录python页面了从python修改成bash 方法一 重启页面按e进入内核编辑模式linux16这行后添加:init/bin/…...
【JS】报错:Uncaught TypeError: Cannot read properties of null (reading ‘classList‘)
错误展示 今天写js代码的时候遇到报错: 源代码: <ul class"slider-indicator"><li class"active"></li><li></li><li></li><li></li><li></li><li><…...
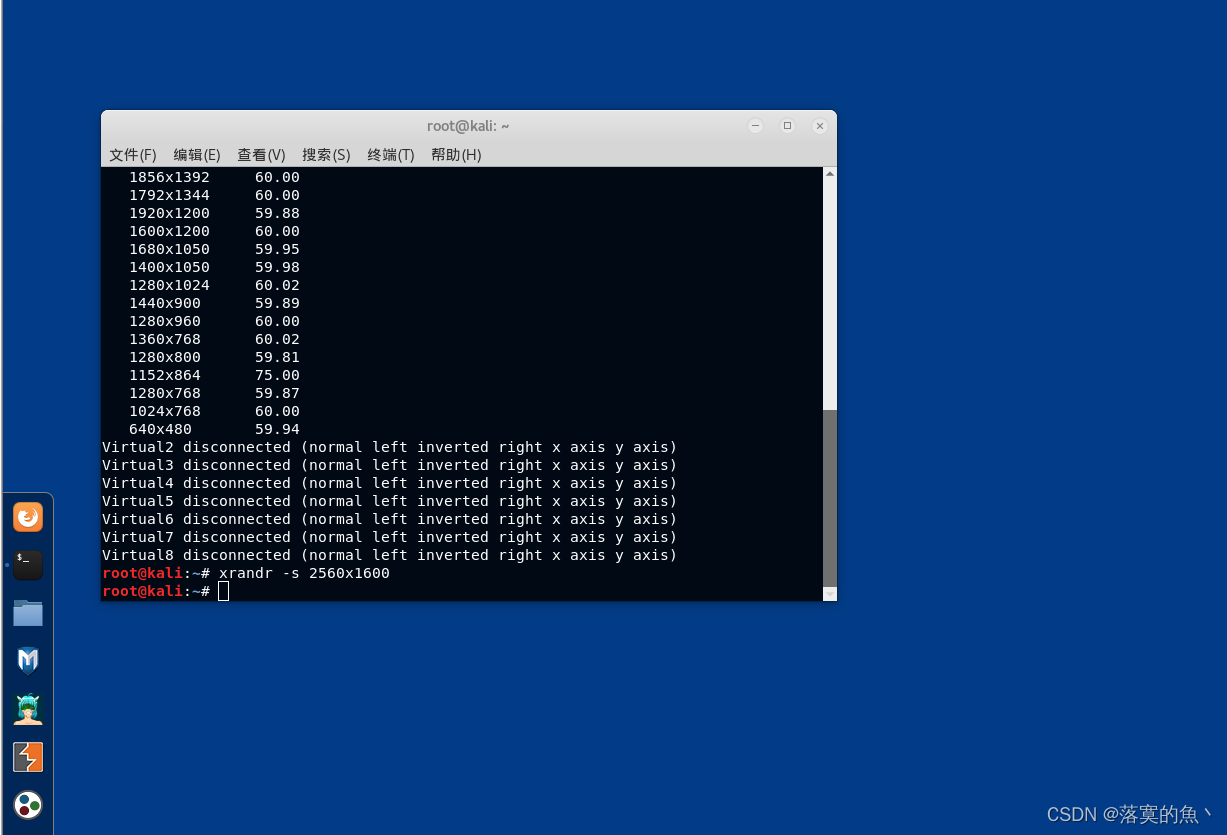
kali2.0安装VMware Tools 和自定义改变分辨率
kali2.0安装VMware Tools 和自定义改变分辨率 VMware Tools 简介:VMware Tools安装:自定义改变分辨率:xrandr命令修改分辨率: 前言: 因为kali2.0比较老 所以需要手动安装 WMware Tools 进行复制粘贴操作! …...
redis中根据通配符删除key
redis中根据通配符删除key 我们是不是在redis中keys user:*可以获取所有key,但是 del user:*却不行这里我提供的命令主要是SCANSCAN 0 MATCH user:* COUNT 100使用lua保证原子性 SCAN参数描述 在示例中,COUNT 被设置为 100。这是一个防止一次性获取大…...

FreeMove:Windows系统磁盘空间智能优化解决方案
FreeMove:Windows系统磁盘空间智能优化解决方案 【免费下载链接】FreeMove Move directories without breaking shortcuts or installations 项目地址: https://gitcode.com/gh_mirrors/fr/FreeMove 当C盘空间告急时,大多数Windows用户面临着一个…...

掌控AMD Ryzen性能:5步精通SMUDebugTool硬件调试技巧
掌控AMD Ryzen性能:5步精通SMUDebugTool硬件调试技巧 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: https://git…...

《机密计算破局政务金融、截图工具漏洞泄露NTLM哈希、智能体仿冒日增200+:AI安全的三场“攻防战”》
一、全链路机密计算破局:政务/金融敏感数据进入“可信推理”时代当前,大模型落地过程中面临的核心矛盾在于:越是高价值的专业技术领域,其训练数据和实时推理数据的安全级别就越高。在政务场景中,政府规划、财政数据、内…...

软件功能设计核心原则与方法论
软件功能设计需将用户需求转化为可落地的功能模块,遵循四大核心原则,确保规范性、实用性和可扩展性。以下表格总结核心原则及示例:原则核心要点示例(EMS场景)高内聚、低耦合模块职责单一,边界清晰ÿ…...

MD源码#MDH5影视源码主题模版下载 苹果CMS V10版
内容目录一、详细介绍二、效果展示1.部分代码2.效果图展示三、学习资料下载一、详细介绍 MD源码#MDH5影视源码主题模版下载 苹果CMS V10版 一键部署版本,完美运营版本带采集规则模块 system/include.html–公共引用文件 system/header.html–头部文件 system/foo…...

苹果果梗检测数据集VOC+YOLO格式1141张2类别有增强
注意数据集大约450张是原图剩余均为增强生成图片数据集格式:Pascal VOC格式YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件)图片数量(jpg文件个数):1141标注数量(xml文件个数):1141…...

Meta与斯坦福:字节级AI实现逐字节生成瓶颈突破与速度提升能力
这项由Meta人工智能基础研究团队(FAIR at Meta)与斯坦福大学、华盛顿大学联合开展的研究,于2026年5月发表,论文预印本编号为arXiv:2605.08044v1。感兴趣的读者可以通过该编号在arXiv平台上查阅完整论文。现代语言模型的工作方式&a…...

NeumAI向量检索平台:构建生产级RAG应用的端到端Pipeline实践
1. 项目概述:从“Neum”到“AI”,一个向量检索系统的诞生最近在折腾RAG(检索增强生成)应用,发现向量检索这块的性能和成本,简直是决定项目成败的“命门”。自己从零开始搭一套,从数据清洗、向量…...

企业级知识管理新门槛:NotebookLM单用户年成本超$298?我们用5类典型场景算清ROI临界点
更多请点击: https://intelliparadigm.com 第一章:企业级知识管理新门槛:NotebookLM单用户年成本超$298?我们用5类典型场景算清ROI临界点 当企业评估AI增强型知识管理工具时,隐性成本常被低估——NotebookLM虽未公开…...

FPGA阵列信号处理矩阵算子高性能实现【附代码】
✨ 长期致力于自动驾驶、阵列信号处理、矩阵特征值分解、Jacobi旋转、三角矩阵求逆、序列排序、序列部分排序研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1&…...