工业相机如何实现实时和本地Raw格式图像和Bitmap格式图像的保存和相互转换(C#代码,UI界面版)

工业相机如何实现实时和本地Raw图像和Bitmap图像的保存和相互转换(C#代码,UI界面版)
- 工业相机图像格式
- 工业相机实现Raw图像和Bitmap图像的保存和转换的技术背景
- 在相机SDK中获取图像转换图像的代码分析
- 工业相机回调函数里保存Bitmap图像数据
- 工业相机图像转换Bitmap图像格式重要核心代码
- 工业相机回调函数里保存Raw图像数据
- 工业相机图像转换Raw图像格式重要核心代码
- 代码实现演示(保存Raw图像)
- 代码实现演示(保存Bmp图像)
- 代码实现演示(Bitmap图像转换为Raw图像)
- 代码实现演示(本地Raw图像转换为Bitmap图像)
- 代码实现演示(本地Bitmap图像转换为Raw图像)
- 源码下载链接
- 源码下载链接
- Baumer工业相机通过SDK实现Raw格式的图像保存的行业应用
工业相机图像格式
工业相机RAW文件是一种记录了工业相机传感器的原始信息,同时记录了由相机拍摄所产生的一些原数据(Metadata,如ISO的设置、快门速度、光圈值、白平衡等)的文件。RAW是未经处理、也未经压缩的格式,可以把RAW概念化为“原始图像编码数据”。
工业相机Bitmap图像是一种无损的图像格式,它将图像存储为像素阵列,并可包含调色板信息。这种格式通常用于工业应用中,因为它能够保留图像的细节和质量,并且易于处理和分析。
本文以Baumer工业相机作为案例进行演示,实现将工业相机的图像转换为Raw图像并进行保存到本地,转换Raw图像为Bitmap图像,再从Bitmap图像转换为Raw图像等操作。
工业相机实现Raw图像和Bitmap图像的保存和转换的技术背景
本文通过C#中实现一个简单的UI界面,用于将Raw图像转换为Bitmap图像并进行保存。
用户可以通过该界面执行以下操作:
-
转换Raw图像为Bitmap图像:用户可通过指定的操作步骤和可能的参数,将从工业相机获取的Raw图像数据转换为可处理的Bitmap格式。
-
转换Bitmap图像为Raw图像:用户有能力将转换后的Bitmap图像转换为Raw图像保存到指定的文件路径,以备后续分析或使用。
通过这个UI界面,用户能够在实时应用机器视觉数据处理时快速有效地进行操作,无需深入了解图像数据的底层处理过程。这个简单的介绍旨在为开发人员提供一个明确的方向,以便开始构建此类应用程序,并且该程序主要用于演示目的。
在相机SDK中获取图像转换图像的代码分析
本文介绍使用Baumer工业相机,实现将图像转换为Raw图像并进行保存到本地,转换Raw图像为Bitmap图像,再从Bitmap图像转换为Raw图像等操作
工业相机回调函数里保存Bitmap图像数据
C#环境下在回调函数里保存Bitmap图像代码如下所示:
void mDataStream_NewBufferEvent(object sender, BGAPI2.Events.NewBufferEventArgs mDSEvent)
{try{BGAPI2.Buffer mBufferFilled = null; mBufferFilled = mDSEvent.BufferObj;if (mBufferFilled == null){MessageBox.Show("Error: Buffer Timeout after 1000 ms!");}else if (mBufferFilled.IsIncomplete == true){ mBufferFilled.QueueBuffer();}else{//将相机内部图像内存数据转为bitmap数据System.Drawing.Bitmap bitmap = new System.Drawing.Bitmap((int)mBufferFilled.Width, (int)mBufferFilled.Height, (int)mBufferFilled.Width,System.Drawing.Imaging.PixelFormat.Format8bppIndexed, (IntPtr)((ulong)mBufferFilled.MemPtr + mBufferFilled.ImageOffset));#region//Mono图像数据转换。彩色图像数据转换于此不同System.Drawing.Imaging.ColorPalette palette = bitmap.Palette;int nColors = 256;for (int ix = 0; ix < nColors; ix++){uint Alpha = 0xFF;uint Intensity = (uint)(ix * 0xFF / (nColors - 1));palette.Entries[ix] = System.Drawing.Color.FromArgb((int)Alpha, (int)Intensity, (int)Intensity, (int)Intensity);}bitmap.Palette = palette;#endregion//回调函数保存图像功能if (bSaveImg){//使用bitmap自带函数保存string strtime = DateTime.Now.ToString("yyyyMMddhhmmssfff");string saveimagepath = pImgFileDir + "\\" + strtime + ".jpg";//bitmap.Save(saveimagepath, System.Drawing.Imaging.ImageFormat.Bmp); bSaveImg = false;//变量控制单次保存图像}#region//bitmap的图像数据复制pBitmapBitmap clonebitmap = (Bitmap)bitmap.Clone();BitmapData data = clonebitmap.LockBits(new Rectangle(0, 0, clonebitmap.Width, clonebitmap.Height), ImageLockMode.ReadOnly, clonebitmap.PixelFormat);clonebitmap.UnlockBits(data);pBitmap = clonebitmap;#endregion#region//将pBitmap图像数据显示在UI界面PictureBox控件上prcSource.X = 0;prcSource.Y = 0;prcSource.Width = (int)mBufferFilled.Width;prcSource.Height = (int)mBufferFilled.Height;System.Drawing.Graphics graph = System.Drawing.Graphics.FromHwnd(pictureBoxA.Handle);graph.DrawImage(pBitmap, prcPBox, prcSource, GraphicsUnit.Pixel);#endregionclonebitmap.Dispose(); //清除临时变量clonebitmap所占内存空间mBufferFilled.QueueBuffer();}}catch (BGAPI2.Exceptions.IException ex){{string str2;str2 = string.Format("ExceptionType:{0}! ErrorDescription:{1} in function:{2}", ex.GetType(), ex.GetErrorDescription(), ex.GetFunctionName());MessageBox.Show(str2);}}return;
}
}工业相机图像转换Bitmap图像格式重要核心代码
//将相机内部图像内存数据转为bitmap数据
System.Drawing.Bitmap bitmap = new System.Drawing.Bitmap((int)mBufferFilled.Width, (int)mBufferFilled.Height,(int)mBufferFilled.Width,System.Drawing.Imaging.PixelFormat.Format8bppIndexed, (IntPtr)((ulong)mBufferFilled.MemPtr + mBufferFilled.ImageOffset));#region//Mono图像数据转换。彩色图像数据转换于此不同
System.Drawing.Imaging.ColorPalette palette = bitmap.Palette;
int nColors = 256;
for (int ix = 0; ix < nColors; ix++)
{uint Alpha = 0xFF;uint Intensity = (uint)(ix * 0xFF / (nColors - 1));palette.Entries[ix] = System.Drawing.Color.FromArgb((int)Alpha, (int)Intensity,(int)Intensity, (int)Intensity);
}
bitmap.Palette = palette;
#endregionstring strtime = DateTime.Now.ToString("yyyyMMddhhmmssfff");
string saveimagepath = pImgFileDir + "\\" + strtime + ".brw";//使用Bitmap格式保存
bitmap.Save(saveimagepath, System.Drawing.Imaging.ImageFormat.Bmp); 工业相机回调函数里保存Raw图像数据
C#环境下在回调函数里保存Raw图像代码如下所示:
void mDataStream_NewBufferEvent(object sender, BGAPI2.Events.NewBufferEventArgs mDSEvent)
{try{BGAPI2.Buffer mBufferFilled = null; mBufferFilled = mDSEvent.BufferObj;if (mBufferFilled == null){MessageBox.Show("Error: Buffer Timeout after 1000 ms!");}else if (mBufferFilled.IsIncomplete == true){ mBufferFilled.QueueBuffer();}else{//回调函数保存图像功能if (bSaveImg){//使用bitmap自带函数保存string strtime = DateTime.Now.ToString("yyyyMMddhhmmssfff");string saveimagepath = pImgFileDir + "\\" + strtime + ".jpg";//bitmap.Save(saveimagepath, System.Drawing.Imaging.ImageFormat.Bmp);// Raw格式图像名称string Rawimagepath = pImgFileDir + "\\" + strtime + ".raw";// 原始图像数据保存为Raw格式// 获取第一行的地址IntPtr ptr0 = (IntPtr)((ulong)mBufferFilled.MemPtr + mBufferFilled.ImageOffset);// 计算图像每一行的字节数int stride = (int)mBufferFilled.Width; // 在MONO格式中,每个像素只占据一个字节// 声明一个数组保存图像的数据int bytes0 = Math.Abs(stride) * (int)mBufferFilled.Height;// 将图像数据复制到新的数组中byte[] rawData = new byte[stride * (int)mBufferFilled.Height];System.Runtime.InteropServices.Marshal.Copy(ptr0, rawData, 0, bytes0); // 将数组保存为Raw格式文件System.IO.File.WriteAllBytes(Rawimagepath , rawData);bSaveImg = false;//变量控制单次保存图像}mBufferFilled.QueueBuffer();}}catch (BGAPI2.Exceptions.IException ex){{string str2;str2 = string.Format("ExceptionType:{0}! ErrorDescription:{1} in function:{2}", ex.GetType(), ex.GetErrorDescription(), ex.GetFunctionName());MessageBox.Show(str2);}}return;
}
}工业相机图像转换Raw图像格式重要核心代码
// Raw格式图像名称
string strtime = DateTime.Now.ToString("yyyyMMddhhmmssfff");
string Rawimagepath = pImgFileDir + "\\" + strtime + ".raw";
// 原始图像数据保存为Raw格式
// 获取第一行的地址
IntPtr ptr0 = (IntPtr)((ulong)mBufferFilled.MemPtr + mBufferFilled.ImageOffset);
// 计算图像每一行的字节数
int stride = (int)mBufferFilled.Width; // 在MONO格式中,每个像素只占据一个字节
// 声明一个数组保存图像的数据
int bytes0 = Math.Abs(stride) * (int)mBufferFilled.Height;
// 将图像数据复制到新的数组中
byte[] rawData = new byte[stride * (int)mBufferFilled.Height];
System.Runtime.InteropServices.Marshal.Copy(ptr0, rawData, 0, bytes0);
// 将数组保存为Raw格式文件
System.IO.File.WriteAllBytes(Rawimagepath , rawData);代码实现演示(保存Raw图像)

代码实现演示(保存Bmp图像)

代码实现演示(Bitmap图像转换为Raw图像)

代码实现演示(本地Raw图像转换为Bitmap图像)
这里的转换是可以直接从本地载入Raw图像将其转换为Bitmap图像

代码实现演示(本地Bitmap图像转换为Raw图像)
这里的转换是可以直接从本地载入Bitmap图像将其转换为Raw图像

源码下载链接
完整资源下载链接:[基于机器视觉工业相机的Raw图像和Bitmap图像的保存和转换(C#代码,UI界面版)
](https://mbd.pub/o/bread/mbd-ZZiclJ1x)
源码下载链接
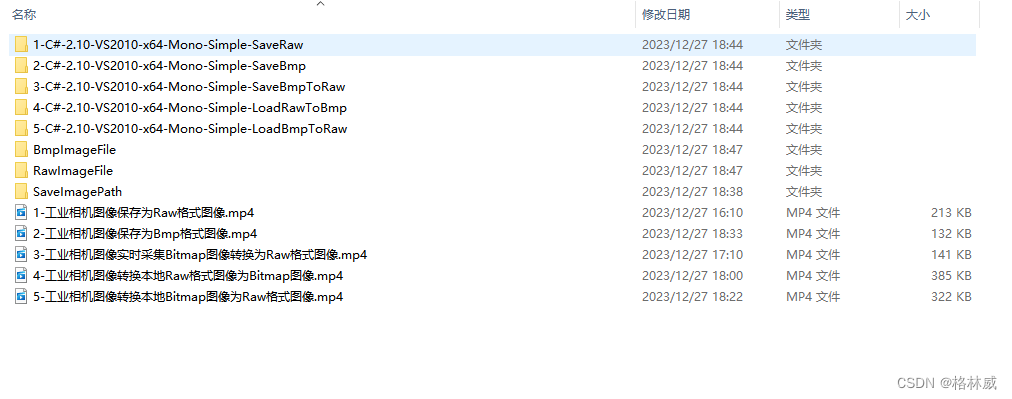
若您想获得博文中涉及的实现完整全部程序文件(包括测试图片、视频,UI文件等,如下图),这里已打包上传至博主的面包多平台和CSDN下载资源,具体可见参考文章和参考视频,已将所有涉及的文件同时打包到里面,点击即可运行,完整文件截图如下:
Baumer工业相机通过SDK实现Raw格式的图像保存的行业应用
工业相机通过SDK实现Raw格式的图像保存在许多行业应用中发挥重要作用,包括但不限于:
-
检测和测量应用:在制造业中,工业相机通过SDK保存Raw格式的图像可用于精确的检测和测量应用,例如缺陷检测、尺寸测量、外观质量控制等。Raw格式图像的高质量和完整性有助于确保实时检测和测量的准确性。
-
医学成像:医疗领域也常常利用工业相机进行医学成像,比如X射线、CT扫描、核磁共振成像等。通过SDK保存Raw格式的图像能够保留更多的图像细节和动态范围,有助于医学图像的后期处理和分析。
-
智能交通:在智能交通系统中,工业相机通过SDK保存Raw格式的图像可用于车牌识别、交通监控等应用。Raw格式的图像数据能提供更多细节,有助于提高识别的准确性和可靠性。
-
机器视觉:在自动化生产线和机器视觉系统中,工业相机通过SDK保存Raw格式的图像可用于产品检测、识别和定位等应用。Raw格式图像保留了更多的信息,有助于提高机器视觉系统的准确性和稳定性。
总的来说,工业相机通过SDK实现Raw格式的图像保存在需要高质量图像数据、精确测量和复杂分析的行业应用中具有广泛的应用前景。
相关文章:
工业相机如何实现实时和本地Raw格式图像和Bitmap格式图像的保存和相互转换(C#代码,UI界面版)
工业相机如何实现实时和本地Raw图像和Bitmap图像的保存和相互转换(C#代码,UI界面版) 工业相机图像格式工业相机实现Raw图像和Bitmap图像的保存和转换的技术背景在相机SDK中获取图像转换图像的代码分析工业相机回调函数里保存Bitmap图像数据工…...
C++初阶------------------入门C++
作者前言 🎂 ✨✨✨✨✨✨🍧🍧🍧🍧🍧🍧🍧🎂 🎂 作者介绍: 🎂🎂 🎂 🎉🎉🎉…...
深度学习核心技术与实践之自然语言处理篇
非书中全部内容,只是写了些自认为有收获的部分。 自然语言处理简介 NLP的难点 (1)语言有很多复杂的情况,比如歧义、省略、指代、重复、更正、倒序、反语等 (2)歧义至少有如下几种: …...
AI-ChatGPTCopilot
ChatGPT chatGPT免费网站列表:GitHub - LiLittleCat/awesome-free-chatgpt: 🆓免费的 ChatGPT 镜像网站列表,持续更新。List of free ChatGPT mirror sites, continuously updated. Copilot 智能生成代码工具 安装步骤 - 登录 github&am…...
网络安全-真实ip获取伪造与隐藏挖掘
目录 真实ip获取应用层网络层网络连接TOAproxy protocol ip伪造应用层网络层TOA攻击proxy protocol 隐藏代理 挖掘代理多地ping历史DNS解析记录国外主机解析域名网站RSS订阅网络空间搜索引擎 总结参考 本篇文章学习一下如何服务如何获取真实ip,隐藏自己的ip…...
)
CMake入门教程【核心篇】添加子目录(add_subdirectory)
文章目录 1.概述2.添加子目录3.指定二进制目录4.排除子目录5.使用别名6.传递变量7.检查子目录是否存在 1.概述 add_subdirectory是 CMake 中的一个命令,用于向当前项目添加一个子目录。它的语法如下: #mermaid-svg-9zKJ3AvoVRln9hon {font-family:"…...

Prototype原型模式(对象创建)
原型模式:Prototype 链接:原型模式实例代码 注解 模式定义 使用原型实例指定创建对象的种类,然后通过拷贝这些原型来创建新的对象。 ——《设计模式》GoF 目的 在软件系统中,经常面临这“某些结构复杂的对象”的创建工作&am…...
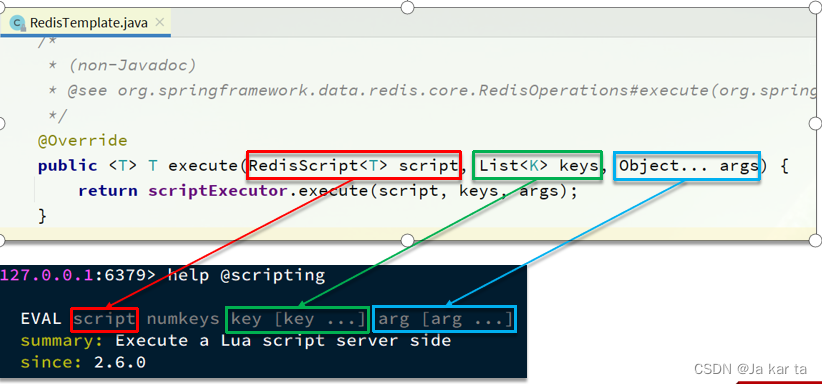
[Redis实战]分布式锁
四、分布式锁 4.1 基本原理和实现方式对比 分布式锁:满足分布式系统或集群模式下多进程可见并且互斥的锁。 分布式锁的核心思想就是让大家都使用同一把锁,只要大家使用的是同一把锁,那么我们就能锁住线程,不让线程进行…...
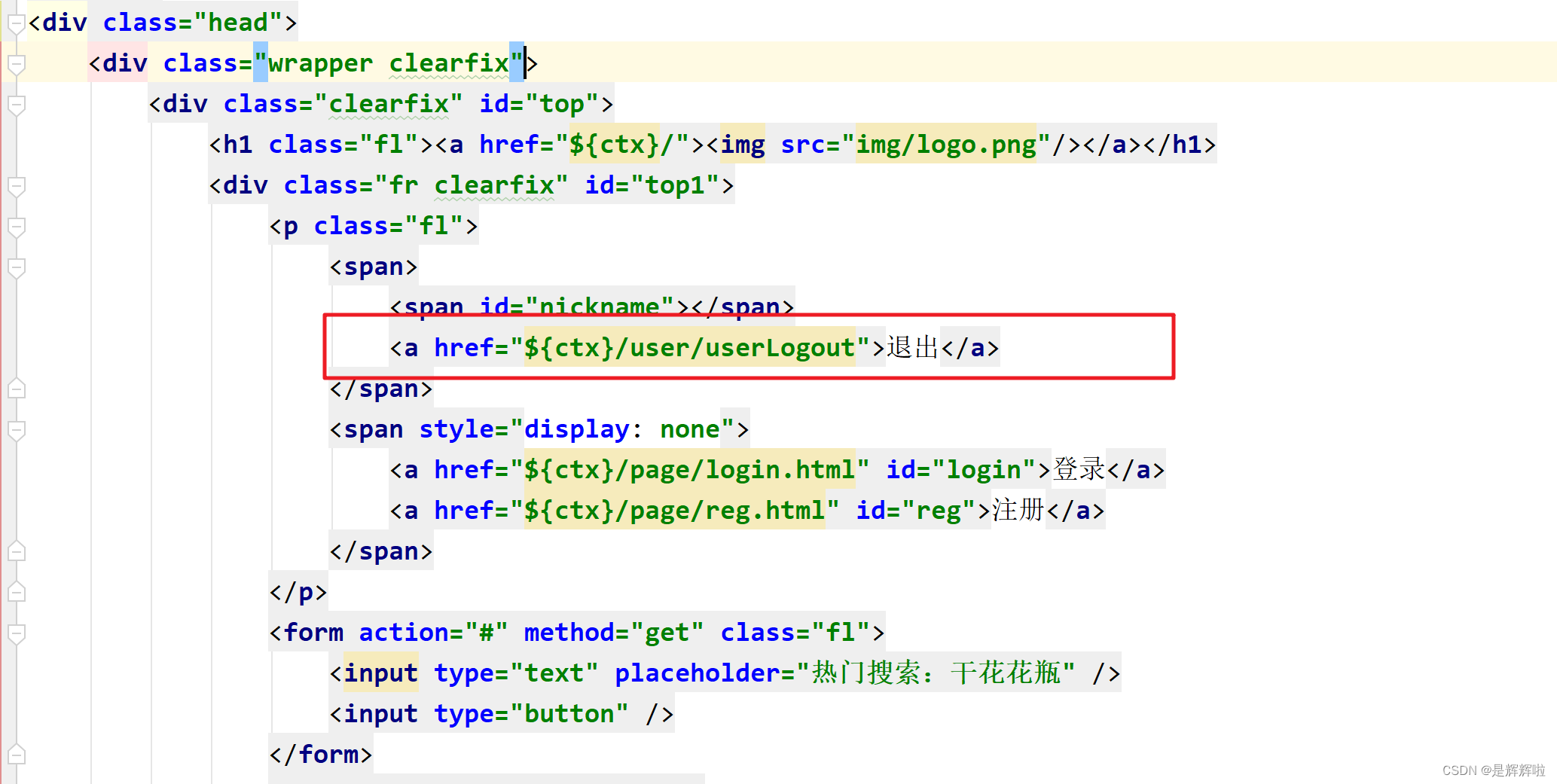
SpingBoot的项目实战--模拟电商【2.登录】
🥳🥳Welcome Huihuis Code World ! !🥳🥳 接下来看看由辉辉所写的关于SpringBoot电商项目的相关操作吧 目录 🥳🥳Welcome Huihuis Code World ! !🥳🥳 一.功能需求 二.代码编写 …...
http——https实现指南
第一部分:HTTPS安全证书简介 什么是HTTPS安全证书? 在网络通信中,HTTPS安全证书是一种由可信任的证书颁发机构(CA)签发的数字证书,用于保障网站与用户之间的数据传输安全。通过加密和身份验证,…...
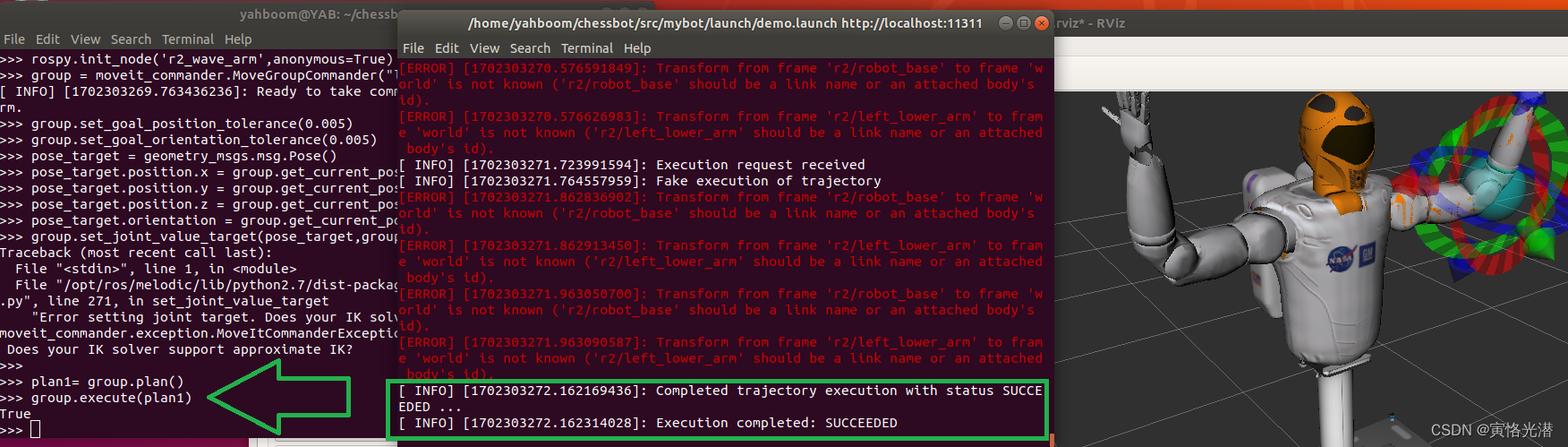
ROS仿真R2机器人之安装运行及MoveIt的介绍
R2(Robonaut 2)是NASA美国宇航局与GM通用联合推出的宇航人形机器人,能在国际空间站使用,可想而知其价格是非常昂贵,几百万美刀吧,还好NASA发布了一个R2机器人的Gazebo模型,使用模型就不需要花钱了,由于我们…...

【linux 多线程并发】线程属性设置与查看,绑定CPU,线程分离与可连接,避够多线程下的内存泄漏
线程属性设置 专栏内容: 参天引擎内核架构 本专栏一起来聊聊参天引擎内核架构,以及如何实现多机的数据库节点的多读多写,与传统主备,MPP的区别,技术难点的分析,数据元数据同步,多主节点的情况…...

70.乐理基础-打拍子-三连音
上一个内容:69.乐理基础-打拍子-大切分与变体-CSDN博客 62-66是总拍数为一拍的节奏型,一共有七个,68-69是两拍的节奏型。 三连音说明: 1.三连音的总拍数可以是一拍、两拍、四拍。。。。 2.打拍子比较难,或许需要用V字…...
100天精通Python(实用脚本篇)——第111天:批量将PDF转Word文档(附上脚本代码)
文章目录 专栏导读1. 将PDF转Word文档需求2. 模块安装3. 模块介绍4. 注意事项5. 完整代码实现6. 运行结果书籍推荐 专栏导读 🔥🔥本文已收录于《100天精通Python从入门到就业》:本专栏专门针对零基础和需要进阶提升的同学所准备的一套完整教…...

如何在 NAS 上安装 ONLYOFFICE 文档?
文章作者:ajun 导览 ONLYOFFICE 文档 是一款开源办公套件,其是包含文本文档、电子表格、演示文稿、表单、PDF 查看器和转换工具的协作性编辑工具。它高度兼容微软 Office 格式,包括 .docx、.xlsx 、.pptx 、pdf等文件格式,并支持…...
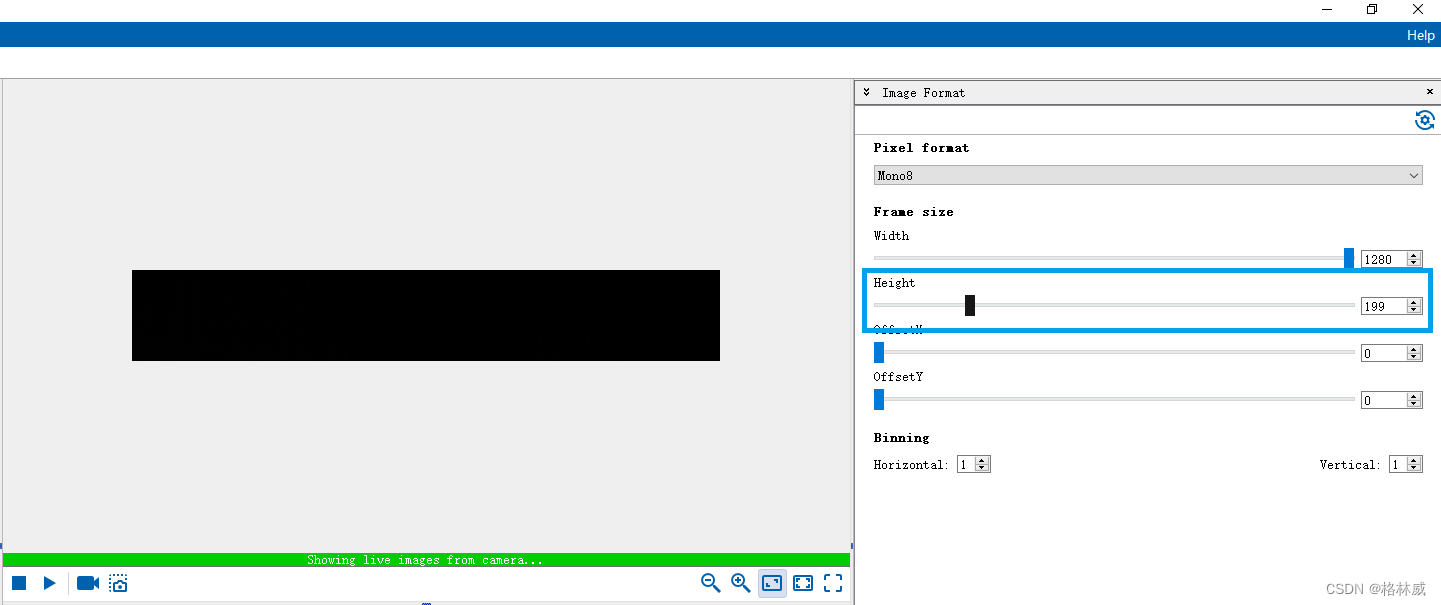
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机的图像剪切(ROI)功能(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机的图像剪切(ROI)功能(C) Baumer工业相机Baumer工业相机的图像剪切(ROI)功能的技术背景CameraExplorer如何使用图像剪切(ROI)功…...

从 WasmEdge 运行环境读写 Rust Wasm 应用的时序数据
WebAssembly (Wasm) 正在成为一个广受欢迎的编译目标,帮助开发者构建可迁移平台的应用。最近 Greptime 和 WasmEdge 协作,支持了在 WasmEdge 平台上的 Wasm 应用通过 MySQL 协议读写 GreptimeDB 中的时序数据。 什么是 WebAssembly WebAssembly 是一种…...
算法训练营Day34(贪心算法)
1005.K次取反后最大化的数组和 1005. K 次取反后最大化的数组和 - 力扣(LeetCode) 秒了 class Solution {public int largestSumAfterKNegations(int[] nums, int k) {Arrays.sort(nums);// -4 -3 -2 -1 5//-2 -2 0 2 5int last -1;for(int i 0;i<…...

uniapp:全局消息是推送,实现app在线更新,WebSocket,apk上传
全局消息是推送,实现app在线更新,WebSocket 1.在main.js中定义全局的WebSocket2.java后端建立和发送WebSocket3.通知所有用户更新 背景: 开发人员开发后app后打包成.apk文件,上传后通知厂区在线用户更新app。 那么没在线的怎么办&…...

ARM1.2作业
实现数码管不同位显示不同的数字 spi.h #ifndef __SPI_H__ #define __SPI_H__ #include "stm32mp1xx_gpio.h" #include "stm32mp1xx_rcc.h"//MOSI对应的引脚输入高低电平的信号PE14 #define MOSI_OUTPUT_H() do{GPIOE->ODR | (0x1 << 14);}whi…...

BilibiliDown:如何轻松下载B站视频的终极免费工具指南
BilibiliDown:如何轻松下载B站视频的终极免费工具指南 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/gh_mirrors/b…...

RK3588平台IMX415摄像头驱动调试全流程与实战指南
1. 项目概述与核心挑战最近在基于瑞芯微RK3588平台调试索尼IMX415摄像头,整个过程可以说是既典型又充满细节。对于嵌入式Linux开发,尤其是多媒体应用,摄像头驱动调试往往是硬件适配中最关键也最磨人的一环。RK3588作为一款高性能的AIoT SoC&a…...

环境配置与基础教程:保姆级教程:在 Mac M 芯片上利用 MPS 加速 YOLO 训练与推理的完整环境搭建
写在前面:为什么你的 Mac 也能跑深度学习? 几年前,如果有人告诉你用 MacBook 训练深度学习模型,你大概会笑出声。那时候 Mac 上的 PyTorch 只能依赖 CPU 吭哧吭哧地算,训练一个小模型都要等到天荒地老。但自从 Apple Silicon 芯片(M1、M2、M3、M4,以及最新的 M5)横空出…...

MAX-M8C-0,支持辅助定位的超紧凑GNSS模块
简介今天我要向大家介绍的是 u-blox 的并发GNSS模块——MAX-M8C-0。这是一款专为成本敏感型应用设计、具有超低功耗的超紧凑高性能模块。该模块基于高性能 u-blox M8 GNSS引擎,支持并发接收多达3个GNSS系统(GPS/Galileo GLONASS或BeiDou)&am…...

短路保护+过流保护+过热保护:MP9447GL-Z的车规级电源可靠性分析
MP9447GL-Z:36V/5A同步降压转换器的高密度电源方案在工业设备、通信基站以及消费电子电源适配器等应用中,电源管理单元需要同时满足宽输入电压、大输出电流和高转换效率的多重要求。传统的分立方案往往需要在PCB面积、BOM成本和散热设计之间做出权衡。MP…...

C加加开发者如何通过Taotoken快速接入多模型API服务
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 C开发者如何通过Taotoken快速接入多模型API服务 1. 场景与需求 在C后端服务中集成大模型能力时,开发者常面临几个实际…...

黑金AX301开发板+HS-04模块:FPGA超声波测距从原理到数码管显示的保姆级教程
黑金AX301开发板实战:基于HS-04模块的FPGA超声波测距系统设计 当超声波传感器遇到FPGA,我们能创造出怎样的精准测距系统?本文将带你从硬件连接到Verilog编码,完整实现一个基于黑金AX301开发板和HS-04超声波模块的测距系统。不同于…...

图解朱刘算法:用Python手搓最小树形图,搞定有向图最小生成树
图解朱刘算法:用Python手搓最小树形图,搞定有向图最小生成树 在算法学习的道路上,图论算法总是让人又爱又恨。今天我们要探讨的是一个特别的存在——朱刘算法(Chu-Liu/Edmonds Algorithm),它能帮我们解决有…...
)
Web安全入门避坑指南:用Pikachu靶场搞懂文件上传的3种Check方式(前端、MIME、getimagesize)
Web安全实战:Pikachu靶场文件上传漏洞攻防全解析 当你第一次接触Web安全时,文件上传功能可能是最令人兴奋又最危险的漏洞之一。想象一下,攻击者仅通过一个看似无害的上传表单就能完全控制你的服务器——这不是电影情节,而是每天都…...

如何快速掌握Spinning Up超参数调优:提升深度强化学习性能的终极指南
如何快速掌握Spinning Up超参数调优:提升深度强化学习性能的终极指南 【免费下载链接】spinningup An educational resource to help anyone learn deep reinforcement learning. 项目地址: https://gitcode.com/gh_mirrors/sp/spinningup Spinning Up是一款…...