Livox-Mid-360 固态激光雷达ROS格式数据分析
前言:
Livox-Mid-360 官方采用livox_ros_driver2ROS功能包发布ROS格式的数据,livox_ros_driver2可以把Livox原始雷达数据转化成ROS格式并以话题的形式发布出去。
下面列举一些雷达的基本概念:
- 点云帧:雷达驱动每次向外发送的一组雷达数据集合称为一帧雷达数据。如果帧率是10HZ,那么每帧点云数据是100ms内雷达扫描的点云集合。每发布一次toptic就是一帧。注意:一帧激光点云数据并不一定是雷达旋转一周所扫描的点云数据。
- 点云帧发布频率:1s内雷达发送的帧数,比如10HZ表示1s内雷达发送10帧的点云数据,即每100ms发送一帧点云数据。
- 扫描频率:雷达的扫描频率一般是针对机械式旋转激光雷达而言的,指1s内雷达旋转的圈数。固态激光雷达的扫描方式和旋转式激光雷达不同,不同产品、厂商有不同的方式。
1.livox_ros_driver2
livox_ros_driver2包中用于处理livox-mid-360的接口有rviz_MID360.launch文件,负责连接到 MID360 LiDAR 设备、发布 pointcloud2 格式数据、自动加载 rviz。
Livox ros 2内部主要参数配置说明:
- publish_freq:设置点云发布,浮点数据类型的频率,推荐值为5.0、10.0、20.0、50.0等。最大发布频率为 100.0 Hz。
- multi_topic:如果 LiDAR 设备有独立的主题来发布点云数据 0 -- 所有 LiDAR 设备都使用相同的主题发布点云数据 1 -- 每个 LiDAR 设备都有自己的主题来发布点云数据
- xfer_format:设置点云格式,0 -- Livox pointcloud2(PointXYZRTLT)点云格式, 1 -- Livox 自定义点云格式, 2 -- PCL 库中的标准点云 2 (pcl :: PointXYZI) 点云格式。
2.点云数据:
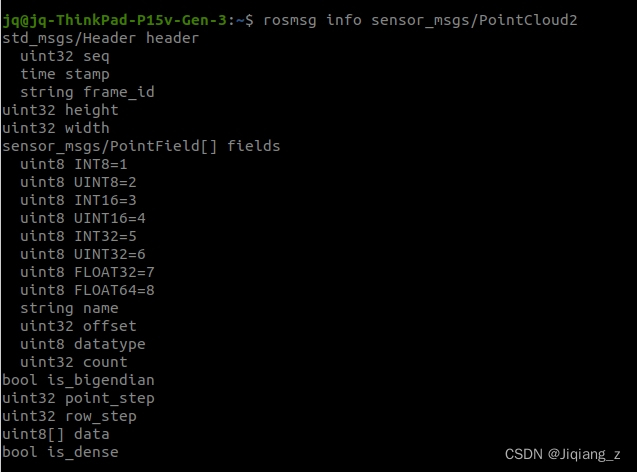
查看livox_ros_driver2发布出的话题,/livox/lidar 的消息类型为:sensor_msgs/PointCloud2,sensor_msgs/PointCloud2消息的内容为下(注意:这是一帧点云的消息类型,不是每个点云的信息):
其中每个参数的意义参考以下文章:
sensor_msgs/PointCloud2雷达数据信息-CSDN博客
2.1 PointCloud2数据结构
sensor_msgs/PointCloud2 Message
File: sensor_msgs/PointCloud2.msg
Raw Message Definition
# 该消息包含一个n维点的集合,它可能包含额外的信息,如法线、强度等。点数据以二进制blob的形式存储,其布局由“fields”数组的内容描述。# 点云数据可以组织为2d(类似图像)或1d(无序)。以二维图像组织的点云可以由立体或飞行时间等相机深度传感器产生。# 传感器数据采集时间,坐标坐标系ID (3d点)。
Header headeruint32 seqtime stamp # topic发布的系统时间 unit:秒string frame_id # topic发布的系统时间 unit:纳秒# 点云的二维结构。如果云是无序的,高度为1,宽度是点云的长度(个数)。
uint32 height #也就是线数,固态激光雷达点云不分线数,所以是1
uint32 width# 描述通道及其在二进制数据块中的布局。
PointField[] fields # 每个点的数据类型,不同枚举值对应不同类型bool is_bigendian # 字节的排列顺序
uint32 point_step # 单点的数据字节步长
uint32 row_step # 一行数据的字节步长
uint8[] data # 存储点云的数组,总长度为row_step*heightbool is_dense # 如果没有非法数据点为真
2.2 fields数据结构
sensor_msgs/PointField Message
File: sensor_msgs/PointField.msg
Raw Message Definition
# 该消息以PointCloud2消息格式保存一个 点 条目的描述。
PointCloud2 message format.
uint8 INT8 = 1
uint8 UINT8 = 2
uint8 INT16 = 3
uint8 UINT16 = 4
uint8 INT32 = 5
uint8 UINT32 = 6
uint8 FLOAT32 = 7
uint8 FLOAT64 = 8string name # 名
uint32 offset # 从点结构开始的偏移量
uint8 datatype # 枚举数据类型
uint32 count # 有多少个元素
2.3 实际数据分析
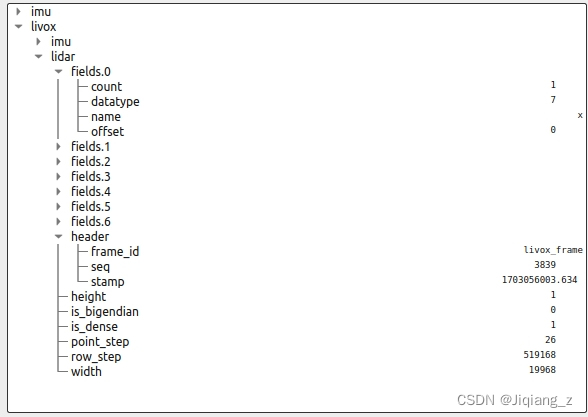
header: // 点云的头信息seq: 4873stamp: // 时间戳secs: 595nsecs: 698295140frame_id: "livox_frame"
height: 1 // 如果cloud 是无序的 height 是 1
width: 9984 // 点云的长度(点云中点的个数)
fields: // 该消息以PointCloud2消息格式保存一个 点 条目的描述。- name: "x" // “x”坐标信息offset: 0 // 从点结构开始的偏移量datatype: 7 // 枚举数据类型 FLOAT32 count: 1 // 域中有多少个元素- name: "y" // “y”坐标信息offset: 4datatype: 7 // FLOAT32 占4个字节count: 1- name: "z" // “z”坐标信息offset: 8datatype: 7 // FLOAT32 占4个字节count: 1- name: "intensity" // 反射强度坐标信息offset: 12datatype: 7 // FLOAT32 占4个字节count: 1- name: "tag" // 回波信息offset: 16datatype: 2 // UINT8 占1个字节count: 1- name: "line"offset: 17datatype: 2 // UINT8 占1个字节count: 1
is_bigendian: False // 数据存储方式,包括大端与小端,具体解释见后文参考链接
point_step: 18 // 一个点占的字节数
row_step: 179712 // 一行的长度占用的字节数
data:[省略]
is_dense: True // 没有非法数据点
---
相关文章:
Livox-Mid-360 固态激光雷达ROS格式数据分析
前言: Livox-Mid-360 官方采用livox_ros_driver2ROS功能包发布ROS格式的数据,livox_ros_driver2可以把Livox原始雷达数据转化成ROS格式并以话题的形式发布出去。 下面列举一些雷达的基本概念: 点云帧:雷达驱动每次向外发送的一…...
如何恢复 iPhone 上永久删除的照片?
2007年,苹果公司推出了一款惊天动地的智能手机,也就是后来的iPhone。你会惊讶地发现,迄今为止,苹果公司已经售出了 7 亿部 iPhone 设备。根据最新一项调查数据,智能手机利润的 95% 都进了苹果公司的腰包。 如此受欢迎…...

基于单片机的公交车站自动报站器设计与实现
一、摘要 随着城市交通的快速发展,公交车作为城市公共交通的主要工具,其便捷性和高效性得到了广泛的认可。然而,由于公交车站的广播系统存在一定的局限性,如人工报站容易出现失误、音量大小不一等问题,给乘客带来了不…...
python之Selenium WebDriver安装与使用
首先把python下载安装后,再添加到环境变量中,再打开控制台输入: pip install selenium 正常情况下是安装好的,检查一下“pip show selenium”命令,出现版本号就说明安装好了。 1:如果出现安装错误: 那就用“…...
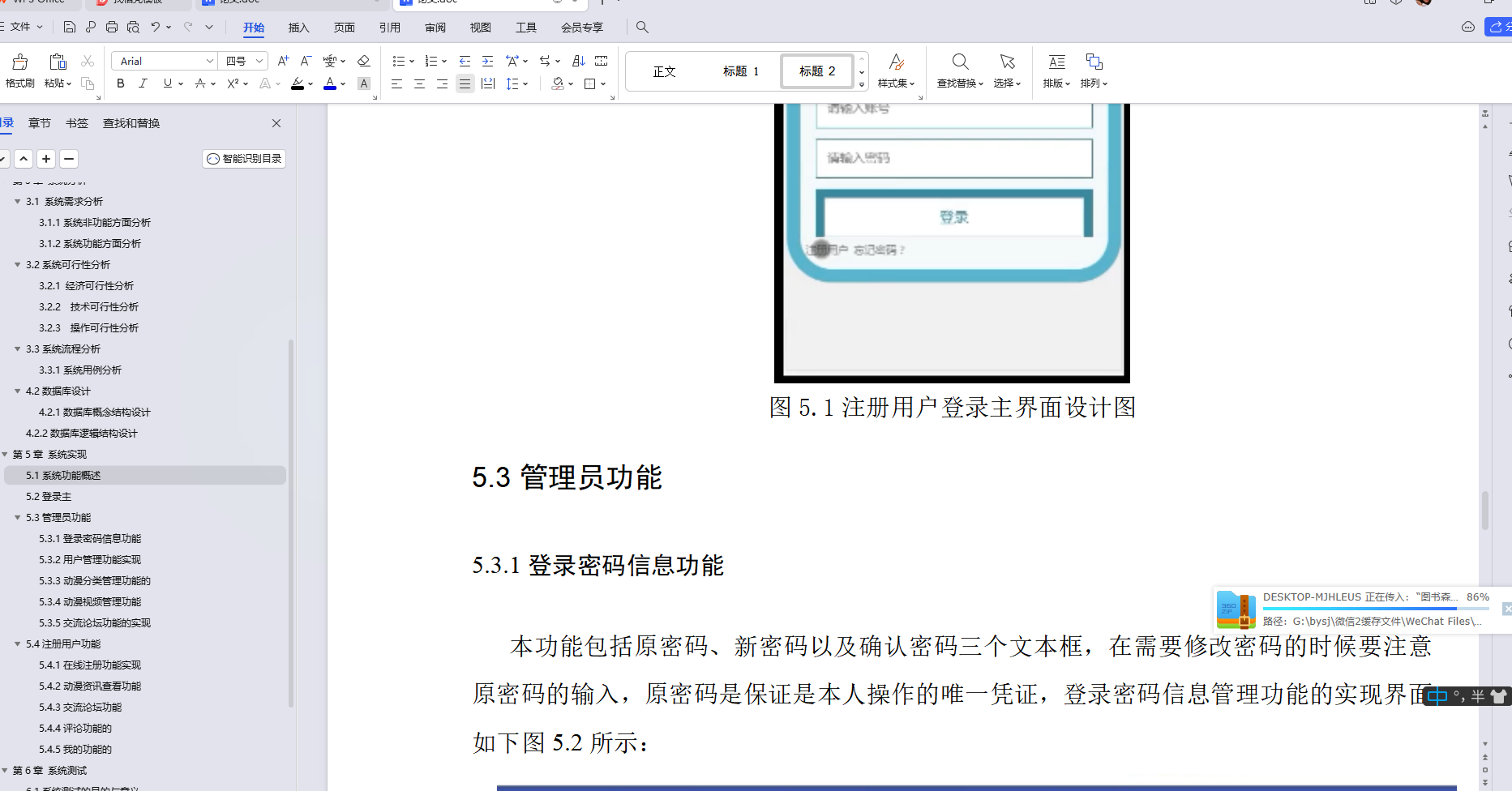
基于Java+Vue+uniapp微信小程序国产动漫论坛系统设计和实现
博主介绍:✌全网粉丝30W,csdn特邀作者、博客专家、CSDN新星计划导师、Java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和学生毕业项目实战,高校老师/讲师/同行交流合作✌ 主要内容:SpringBoot、Vue、SSM、HLM…...
)
奇因子之和(C语言)
题意: 一个整数的因子,就是所有可以整除这个数的数。奇数指在整数中,不能被 2 整除的数。所谓整数 Z 的奇因子,就是可以整除 Z 的奇数。 给定 N 个正整数,请你求出它们的第二大奇因子的和。当然,如果该数只…...
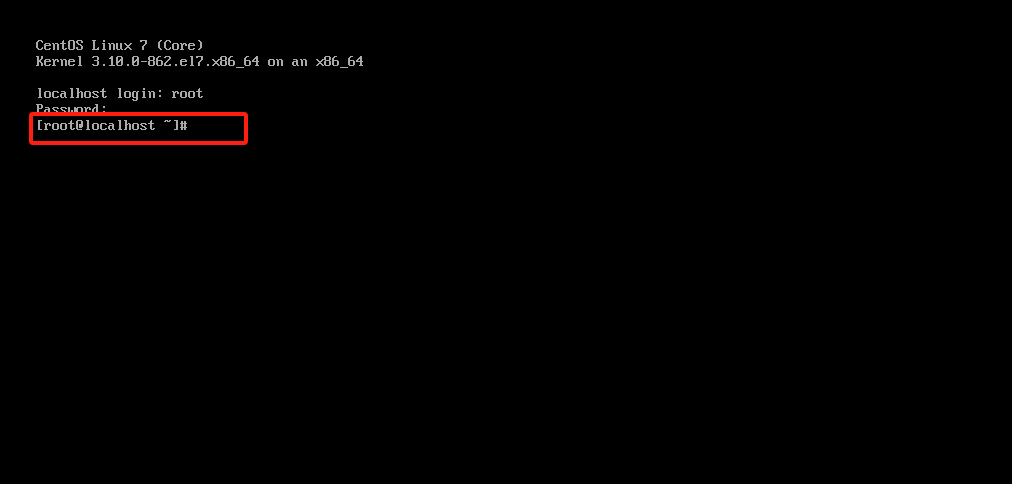
简单FTP客户端软件开发——VMware安装Linux虚拟机(命令行版)
VMware安装包和Linux系统镜像: 链接:https://pan.baidu.com/s/1UwF4DT8hNXp_cV0NpSfTww?pwdxnoh 提取码:xnoh 这个学期做计网课程设计【简单FTP客户端软件开发】需要在Linux上配置 ftp服务器,故此用VMware安装了Linux虚拟机&…...

ArkTS开发实践
声明式UI基本概念 应用界面是由一个个页面组成,ArkTS是由ArkUI框架提供,用于以声明式开发范式开发界面的语言。 声明式UI构建页面的过程,其实是组合组件的过程,声明式UI的思想,主要体现在两个方面: 描述…...

vue项目中实现预览pdf
vue项目中实现预览pdf 1. iframe <iframe :src"pdfSrc"></iframe> data() {return {pdfSrc: http://192.168.0.254:19000/trend/2023/12/27/5635529375174c7798b5fabc22cbec45.pdf,}},iframe {width: 100%;height: calc(100vh - 132px - 2 * 20px -…...
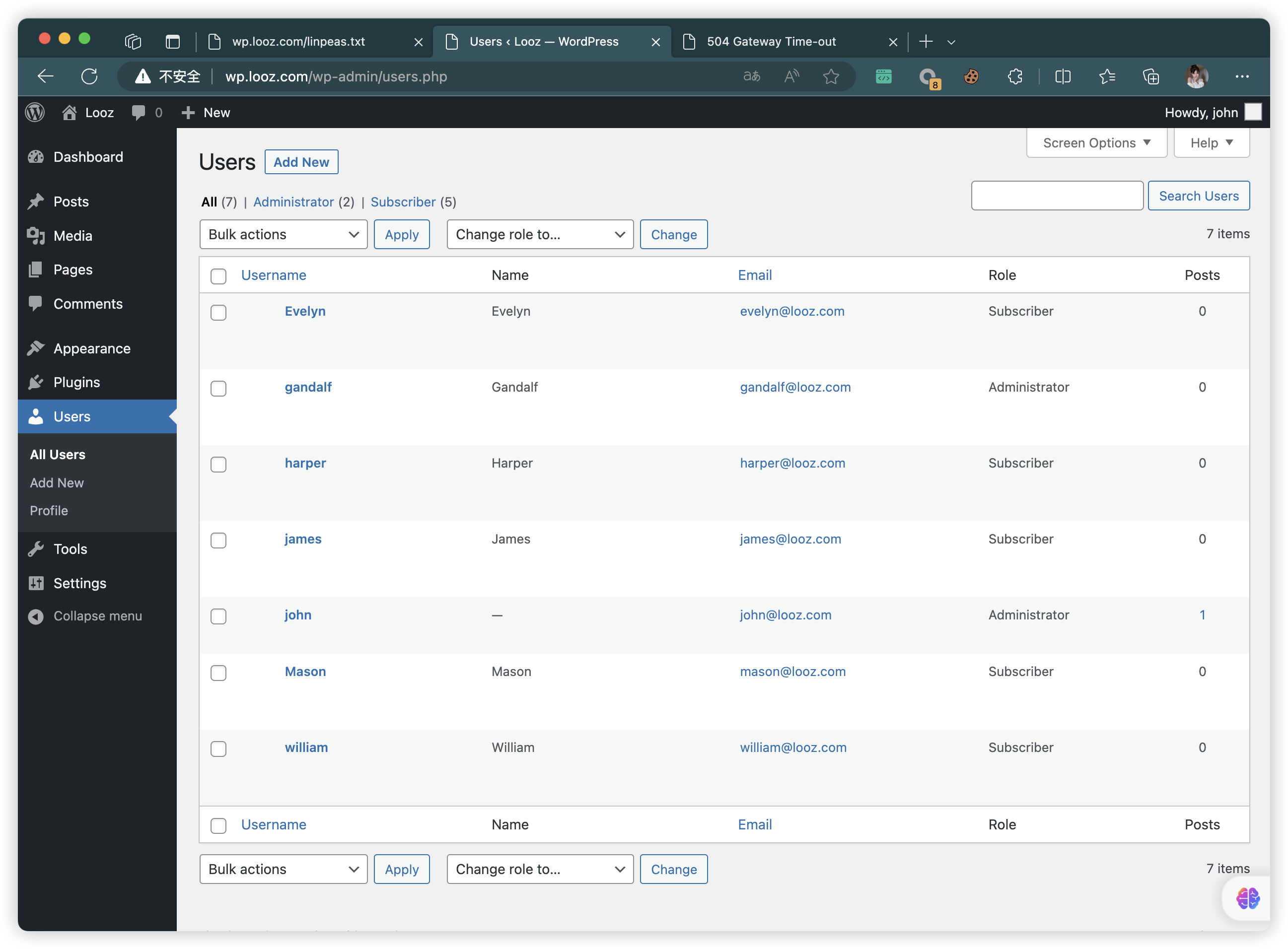
【Vulnhub 靶场】【Looz: 1】【简单】【20210802】
1、环境介绍 靶场介绍:https://www.vulnhub.com/entry/looz-1,732/ 靶场下载:https://download.vulnhub.com/looz/Looz.zip 靶场难度:简单 发布日期:2021年08月02日 文件大小:2.1 GB 靶场作者:mhz_cyber &…...
计算机基础面试题 |03.精选计算机基础面试题
🤍 前端开发工程师(主业)、技术博主(副业)、已过CET6 🍨 阿珊和她的猫_CSDN个人主页 🕠 牛客高级专题作者、在牛客打造高质量专栏《前端面试必备》 🍚 蓝桥云课签约作者、已在蓝桥云…...

SQL最消耗性能查询错误用法示例
查询性能的消耗主要取决于查询的复杂度、表的大小以及使用的索引等因素。以下是一些查询中常见的错误用法示例,它们可能导致性能问题: 全表扫描: 错误用法示例: SELECT * FROM your_table;这种查询会检索表中的所有行,…...
面向对象编程)
Python学习笔记(六)面向对象编程
最近准备HCIE的考试,用空余时间高强度学习python 介绍了Python中面向对象编程的基本概念,包括类、类的属性、类的方法、类的方法中实例方法、类方法、静态方法,在类与对象中动态添加属性和方法,以及继承、类变量、多态等概念 类…...
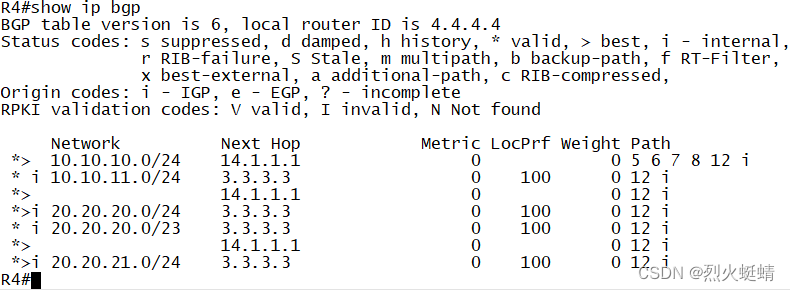
CCNP课程实验-05-Comprehensive_Experiment
目录 实验条件网络拓朴 基础配置实现IGP需求:1. 根据拓扑所示,配置OSPF和EIGRP2. 在R3上增加一个网段:33.33.33.0/24 (用Loopback 1模拟) 宣告进EIGRP,并在R3上将EIGRP重分布进OSPF。要求重分布进OSPF后的路由Tag值设置为666&…...
第3课 使用FFmpeg获取并播放音频流
本课对应源文件下载链接: https://download.csdn.net/download/XiBuQiuChong/88680079 FFmpeg作为一套庞大的音视频处理开源工具,其源码有太多值得研究的地方。但对于大多数初学者而言,如何快速利用相关的API写出自己想要的东西才是迫切需要…...

Java 动态树的实现思路分析
Java 动态树的实现 目录概述需求: 设计思路实现思路分析1. 简单Java实现:2.建立父子表存储3.前端的对应的json 字符串方式 参考资料和推荐阅读 Survive by day and develop by night. talk for import biz , show your perfect code,full busy࿰…...
太阳系三体模拟器
介绍 《三体》是刘慈欣创作的长篇科幻小说,文中提到的三体问题比较复杂和无解。 该项目代码就是利用 Python 来模拟三体的运行,此项目代码完全共享,欢迎下载。 我们可以自己通过调整天体的初始坐标、质量和矢量速度等等参数来自定义各种场景…...
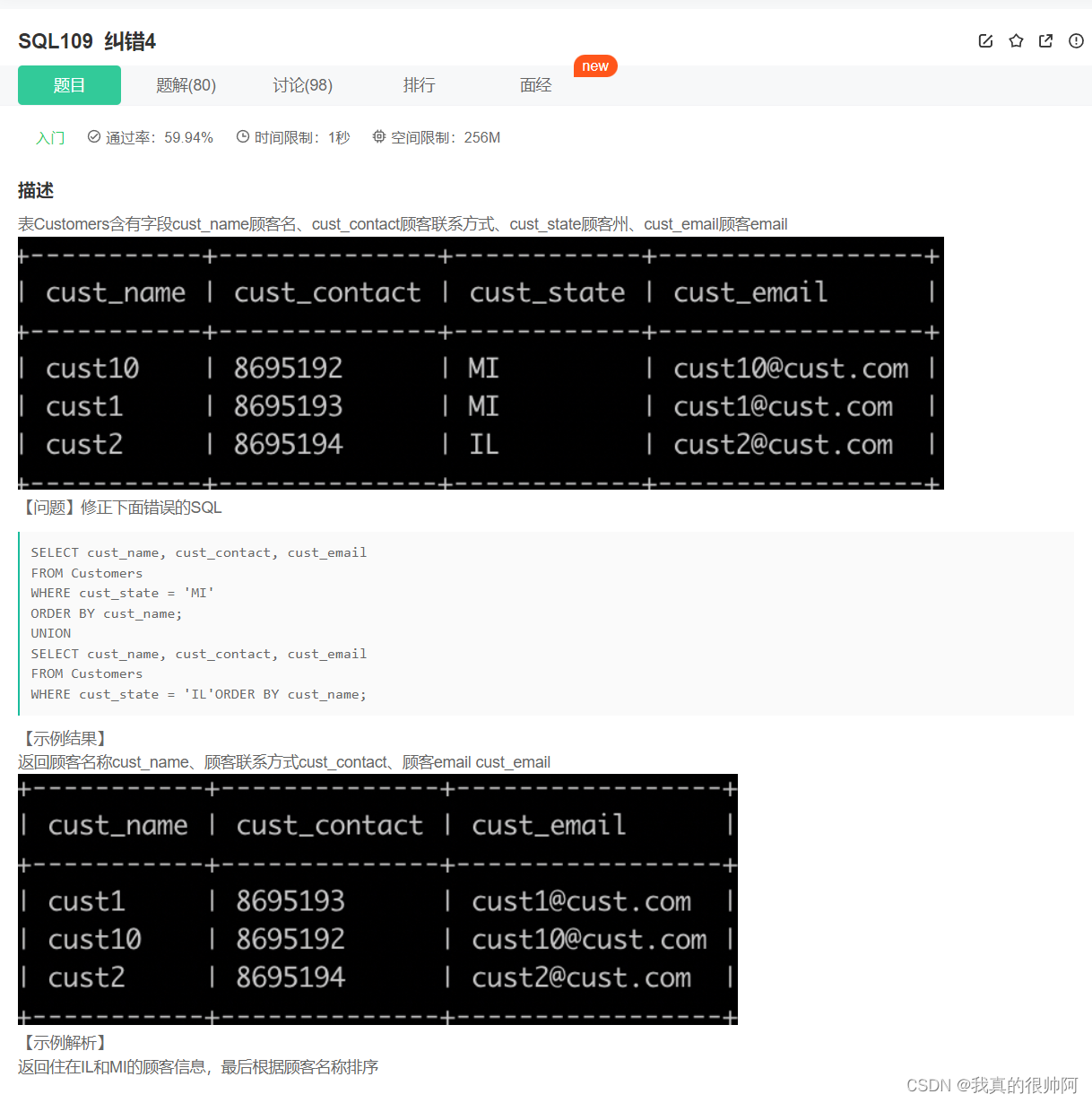
SQL常见面试题
今天刷了一遍牛客里的必知必会题,一共50道题,大部分都比较基础,下面汇总一下易错题。 SQL81 顾客登录名 本题几个关键点: 登录名是其名称和所在城市的组合,因此需要使用substring()和concat()截取和拼接字段。得到登…...

怎么获取客户端真实IP?GO
在使用 Golang 的 net/rpc 包进行 RPC 服务开发时,我们有时候会遇到需要获取客户端的真实 IP 和当前连接 net.Conn 的需求。然而在 net/rpc 的服务处理方法中,并没有提供直接获取到这些信息的途径。 那么,我们应该如何去获取这些信息呢&…...
山海鲸可视化软件的优势:数据整合、可视化与个性化定制
随着科技的快速发展,企业数字化转型已成为必然趋势。而对于一些本身没有开发优势或非技术型企业,数字化产品的选择就成为重中之重。作为山海鲸可视化软件的开发者,我们深知这一点,对于企业来说,能选择一个产品一定要有…...

汽车线控转向系统动力学法Carsim和Simulink联合仿真
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。🍎 往期回顾关注个人主页:Matlab科研工作室👇 关注我领取海量matlab电子书和…...

提升效率:用快马一键生成网络应用用户认证api模块
最近在开发一个网络应用时,遇到了用户认证模块的重复开发问题。每次新建项目都要从头写注册登录逻辑,不仅耗时还容易出错。后来发现了InsCode(快马)平台的智能生成功能,帮我快速解决了这个问题。 用户认证模块的核心需求 网络应用中ÿ…...

基于YOLOv11姿态检测的AI健身助手具备实时姿态识别、运动计数与反馈、训练记录和计划制定功能
基于YOLOv11姿态检测的AI健身助手 ✨ 功能特点 实时运动计数 - 自动计算您的健身次数多种运动支持 - 包括深蹲、俯卧撑、仰卧起坐、哑铃运动等十多种先进的姿态检测 - 采用YOLOv11实现精准跟踪模型切换功能 - 可以在小型(更快)和大型(更精确)YOLOv11模型之间轻松切换可视化反馈…...

LuckyLilliaBot QQ群管理自动化实战指南:从零搭建高效智能管理方案
LuckyLilliaBot QQ群管理自动化实战指南:从零搭建高效智能管理方案 【免费下载链接】LuckyLilliaBot NTQQ的OneBot API插件 项目地址: https://gitcode.com/gh_mirrors/li/LuckyLilliaBot LuckyLilliaBot是一款基于NTQQ客户端与OneBot11协议的QQ机器人开发框…...

深入解析NAND Flash基础操作与系统集成——从阵列结构到多Die协同
1. NAND Flash基础结构与工作原理 NAND Flash存储器是现代存储系统的核心组件,从U盘到企业级SSD都依赖这项技术。要理解它的强大之处,得先从它的物理结构说起——想象一个巨大的立体停车场,每个停车位就是一个存储单元,而控制电路…...

MATLAB驱动的焊接机器人智能轨迹优化与动态仿真实践
1. 焊接机器人轨迹优化的技术挑战 焊接机器人在现代制造业中扮演着越来越重要的角色,但要让机器人焊得又快又好,可不是件简单的事。想象一下,你要用焊枪在复杂的三维曲面上画出一条完美的焊缝,既要保证焊接质量,又要避…...

告别低效收藏:MarkDownload让网页内容保存效率提升300%
告别低效收藏:MarkDownload让网页内容保存效率提升300% 【免费下载链接】markdownload A Firefox and Google Chrome extension to clip websites and download them into a readable markdown file. 项目地址: https://gitcode.com/gh_mirrors/ma/markdownload …...

图像转3D模型:零基础制作个性化浮雕的完整指南
图像转3D模型:零基础制作个性化浮雕的完整指南 【免费下载链接】ImageToSTL This tool allows you to easily convert any image into a 3D print-ready STL model. The surface of the model will display the image when illuminated from the left side. 项目地…...

激活函数进化史:从Sigmoid到ELU,聊聊那些年我们踩过的‘梯度消失’和‘神经元死亡’的坑
激活函数进化史:从Sigmoid到ELU,聊聊那些年我们踩过的‘梯度消失’和‘神经元死亡’的坑 神经网络的世界里,激活函数就像神经元之间的"翻译官",负责将输入信号转化为有意义的输出。但这位翻译官的脾气可不太好琢磨——…...

告别模糊人像:AI驱动的面部增强新方案
告别模糊人像:AI驱动的面部增强新方案 【免费下载链接】DZ-FaceDetailer a node for comfyui for restore/edit/enchance faces utilizing face recognition 项目地址: https://gitcode.com/gh_mirrors/dz/DZ-FaceDetailer 在数字图像处理领域,人…...