0基础学习VR全景平台篇第134篇:720VR全景,云台调整节点
相机、云台和脚架全套设备组装完成后需要进行调校才能开始拍摄。这一节,我们将主要介绍云台调整的两个内容:对中心靶、调三点一线。(后附调校原理)
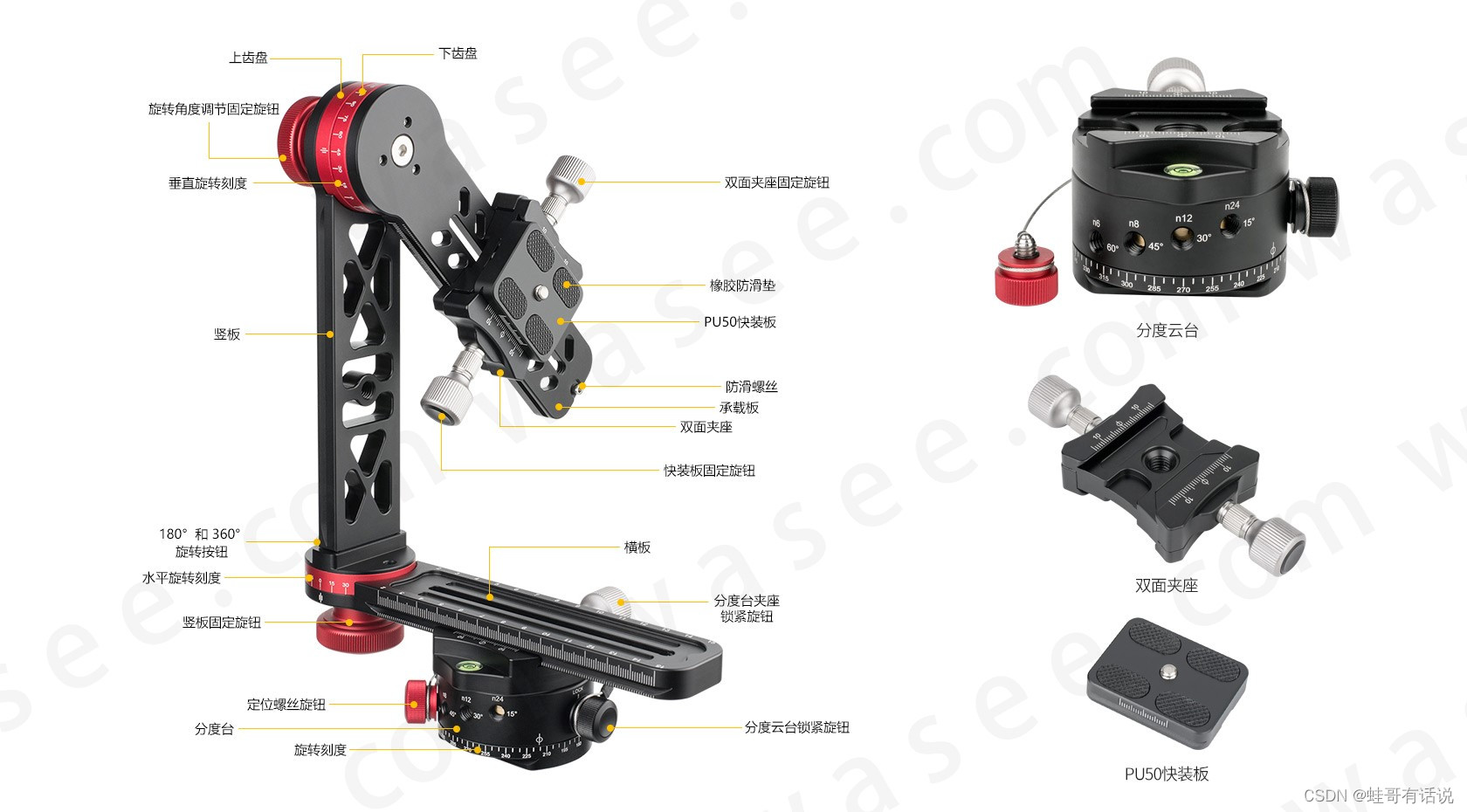
云台部件名称
一、调节准备
(一)对于安装好的云台
1.检查气泡水平仪,通过调整脚架达到水平。
2.将承载板转动至竖直向上,上齿盘刻度线对准下齿盘0°和180°,以确保板架没有倾斜。
3.检查水平旋转刻度盘,刻度对准0°。

安装检查
(二)对于相机
1.此时相机镜头朝下,将相机开机。
2.转动机身上的模式选择转盘,选择M档。
3.按下机身上的速控按钮,拨动多功能控制按钮设置光圈为F8,设置ISO值为100。(光圈可使用速控转盘设置,ISO可以使用ISO感光度设置按钮单独设置)
4.按下取景器右侧实时取景按键,显示屏显示场景画面。
5.拨动主拨盘调整快门速度,以画面显示清晰明亮为准。
6.按下菜单键,转动主拨盘翻动菜单页面,将显示网格线选项设置为开启,选择6×4网格线。 再按一次菜单键返回取景画面。

部件名称

二、调节内容
(一)对中心靶
1.我们需要将显示屏上水平中线对齐分度台中心0刻度。未对齐时,一只手握紧板架,另一只手旋松分度台夹座锁紧旋钮,再前后推动横板的位置以调整。
2.我们需要将显示屏上竖直中线对齐横板中轴位置,此处无明确刻度,目测即可。未对齐时,小心取下相机,旋松快装板与相机的固定螺丝,调整角度,确保垂直安装后再组装。

对中心靶
(二)调三点一线
1.将承载板转动至水平,上齿盘刻度线对准下齿盘90°。
2.在环境中找到一条竖直的线,一般选择墙或门框等边线。
3.在相机与上述找到的竖线之间,找到或放置另一条细线或者点(以下统称为中间点),它所在的位置不宜离竖线过近。
4.观察相机显示屏,调整设备或中间点位置,使得显示屏上中心竖线、中间点、环境中的竖线重合。
5.转动云台,使右侧竖线对齐重合环境竖线,观察中间点是否也重合,重合时再转动云台,观察左侧竖线、中间点、环境竖线的重合情况。当一侧三者不重合时,一只手托住相机,另一只手松动双面夹座固定旋钮,在承载板上前后推动相机-快装板-夹座整体结构,达到三者完全重合的状态,再转动至另一侧,重复操作。两边观察结果三者都重合时,无需进一步操作,三点一线调整完毕,可以进入拍摄阶段。

相对位置参考

中线对齐画面

右侧线对齐画面
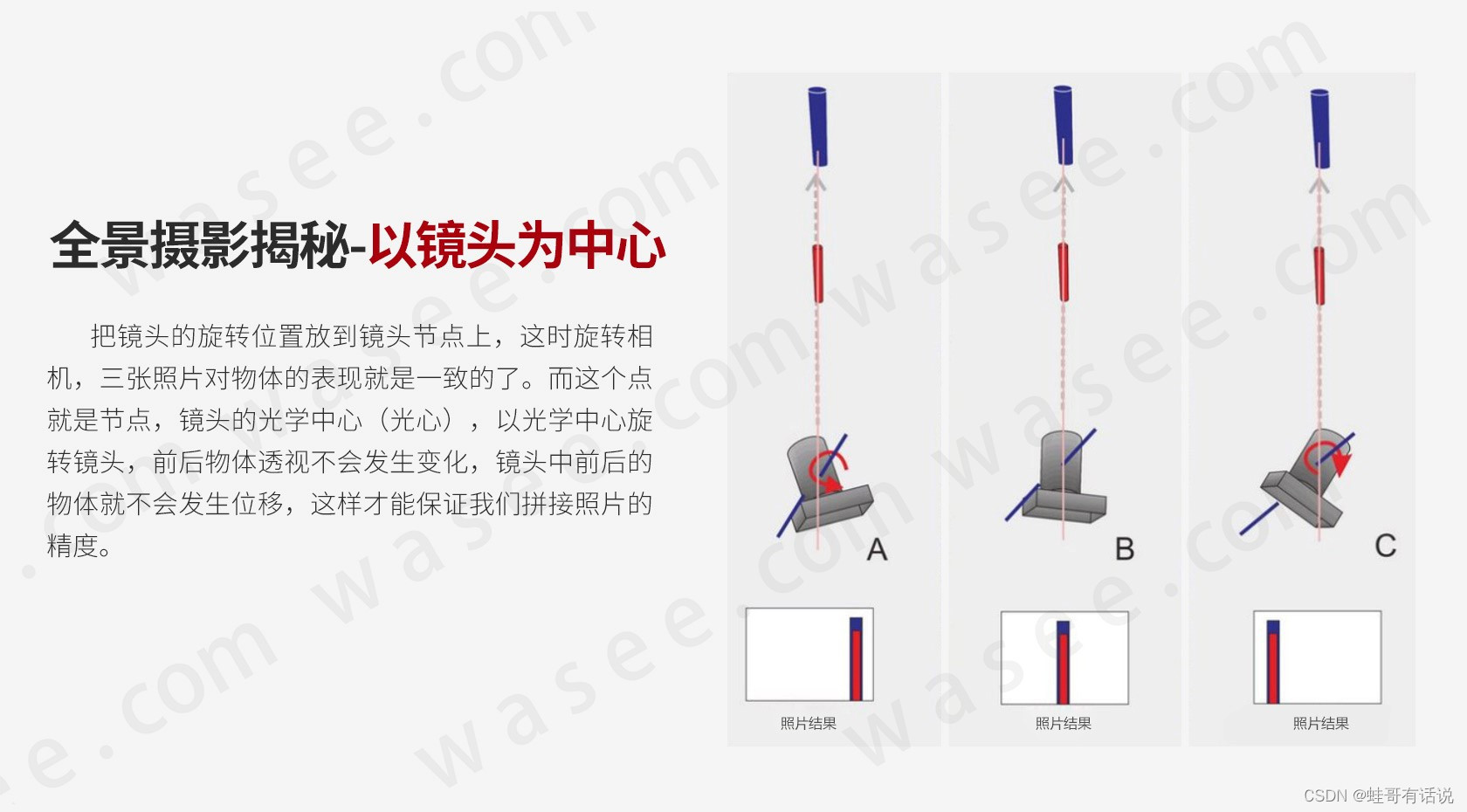
附:节点调节原理

下课啦!!!
欢迎在下方评论区留言,与蛙色的小伙伴们共同交流进步吧!
相关文章:
0基础学习VR全景平台篇第134篇:720VR全景,云台调整节点
相机、云台和脚架全套设备组装完成后需要进行调校才能开始拍摄。这一节,我们将主要介绍云台调整的两个内容:对中心靶、调三点一线。(后附调校原理) 云台部件名称 一、调节准备 (一)对于安装好的云台 1.检…...

扫地机器人地图与用户终端的同步
以下内容为本人的学习笔记,如需要转载,请声明原文链接 微信公众号「ENG八戒」https://mp.weixin.qq.com/s/APaJheSbgTW3jNssWsp5Ng 地图数据来源于机器人算法模块,一般通过SLAM算法完成建图的过程。 建图过程中,基础数据涉及到各…...

使用机器学习进行语法错误检测/纠正
@francescofranco_39234 一、说明 一般的学习,特别是深度学习,促进了自然语言处理。各种模型使人们能够执行机器翻译、文本摘要和情感分析——仅举几个用例。今天,我们将研究另一个流行的用途:我们将使用Gramformer构建一个用于机器学习语法错误检测和纠正的管道。 阅读本文…...

从0到1快速入门ETLCloud
一、ETLCloud的介绍 ETL是将业务系统的数据经过抽取(Extract)、清洗转换(Transform)之后加载(Load)到数据仓库的过程,目的是将企业中的分散、凌乱、标准不统一的数据整合到一起,为企…...
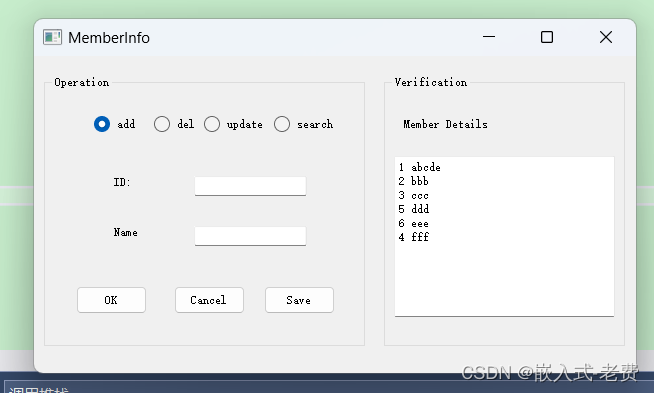
QT上位机开发(会员管理软件)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 前面我们学习了ini文件的解析办法,通过QSettings类就可以很轻松地访问ini文件里面的数据。除了ini文件之外,另外一种经常出…...
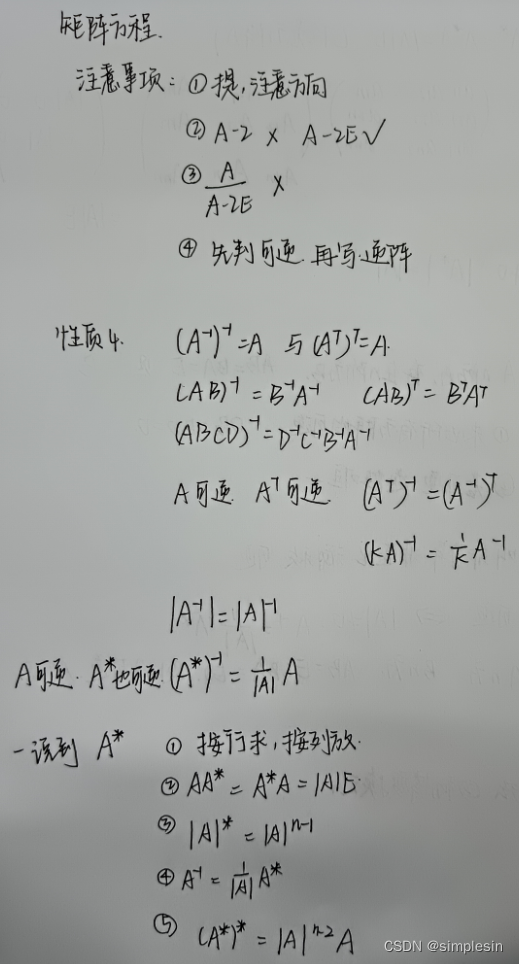
线性代数笔记3 1.1
学习视频: 2.2 矩阵运算(二)_哔哩哔哩_bilibili 包括内容: p10矩阵运算(二) p11特殊矩阵 p12逆矩阵(一) p13逆矩阵(二)...
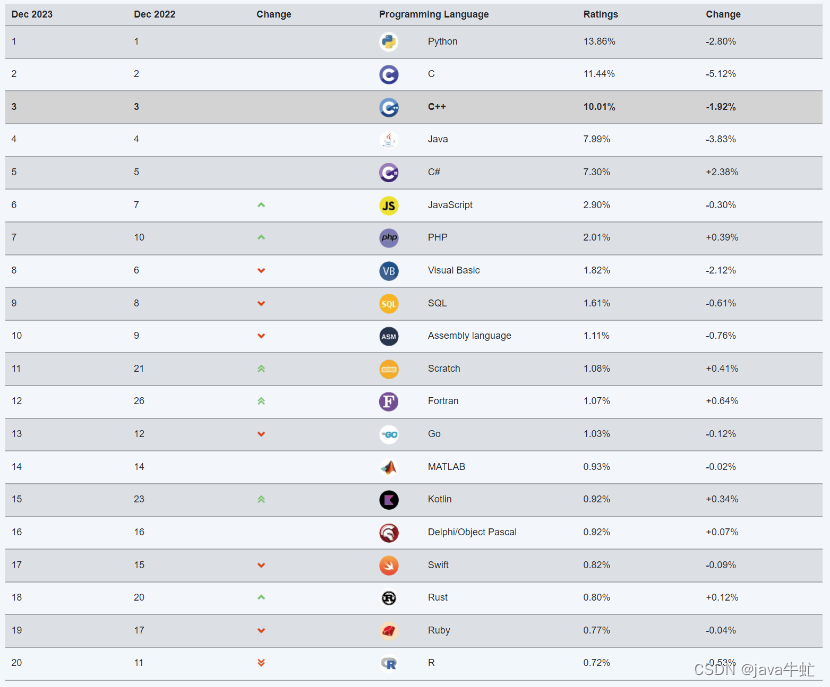
2023年12月编程语言排行榜
TIOBE Index for December 2023 December Headline: C# on its way to become programming language of the year 2023 2023年12月的TIOBE指数:12月头条:c#将成为2023年最佳编程语言 Yes, I know, we have been here before. At the end of 2022, it looked like …...

Redis VS Memcached:选择哪个更适合您的应用?
目录 1、前言 2、概念简介 2.1 Redis 2.2 Memcached 3、数据模型 4、持久性 5、分布式能力 6、性能和扩展性 7、如何选择适合您引用的缓存系统 8、结语 1、前言 Redis和Memcached都是常见的内存缓存系统,用于提升应用程序的性能和可扩展性。它们都具有高…...
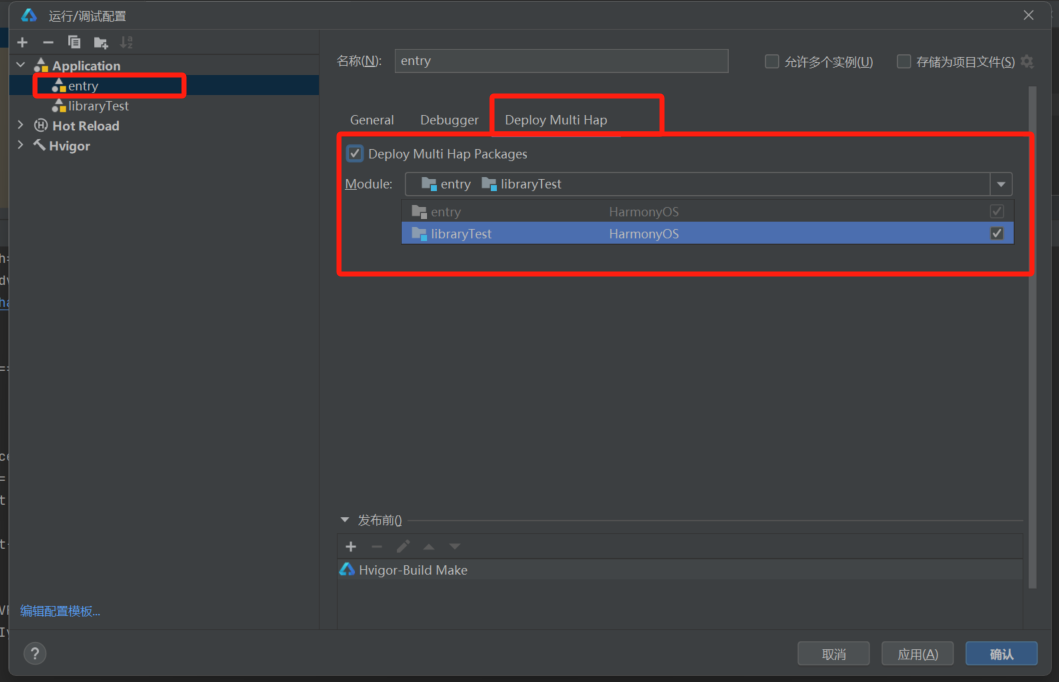
【HarmonyOS开发】共享包HAR和HSP的创建和使用以及三方库的发布
OpenHarmony提供了两种共享包,HAR(Harmony Archive)静态共享包,和HSP(Harmony Shared Package)动态共享包。 HAR与HSP都是为了实现代码和资源的共享,都可以包含代码、C库、资源和配置文件&…...
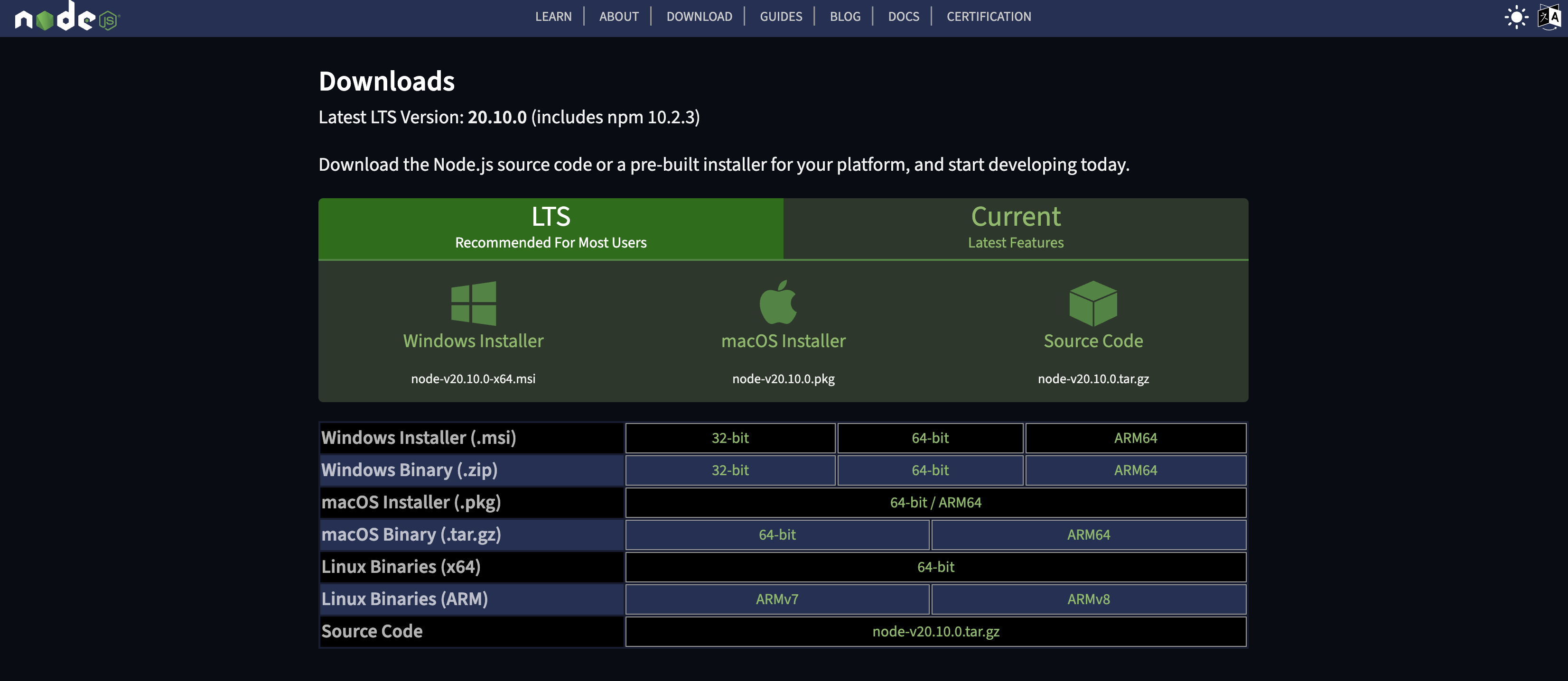
安装 Node.js、npm
安装 nodejs 安装Node.js的最简单的方法是通过软件包管理器。 Node.js官网:https://nodejs.org/en/download/ cd /usr/local/src/wget -c https://nodejs.org/dist/v18.16.0/node-v18.16.0-linux-x64.tar.xz xz -d node-v18.16.0-linux-x64.tar.xz tar -xf node…...
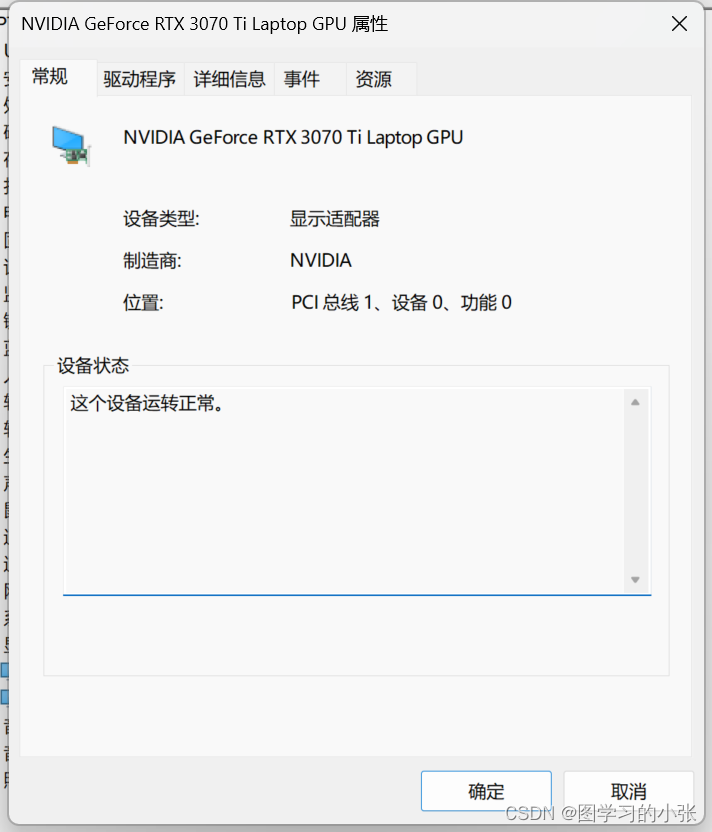
解决报错:找不到显卡
今天做实验碰到一个问题:torch找不到显卡: 打开任务管理器,独显直接没了,一度以为是要去修电脑了,突然想到上次做实验爆显存,屏蔽了gpu用cpu训练: import os os.environ["CUDA_DEVICE_OR…...

如何使用Node.js快速创建本地HTTP服务器并实现公网访问服务端
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 推荐:kwan 的首页,持续学…...

【社交网络分析】课程考试复盘 + 相关资料补充
【社交网络分析】考试后复盘 相关资料补充 写在最前面论述1.描述Logistic回归模型构造损失函数的主要思想。它是如何把线性回归预测模型转化为二分类模型的。Logistic回归模型构造损失函数的主要思想Logistic回归如何将线性回归预测模型转化为二分类模型 2.社交网络分析中面临…...
算法——队列+宽搜(BFS)
队列这种数据结构大都服务于一个算法——宽搜(BFS)。宽搜还可以运用到二叉树、图、迷宫最短路径问题、拓扑排序等等 N叉数的层序遍历 N叉树的层序遍历 题目解析 给定一个 N 叉树,返回其节点值的_层序遍历_。(即从左到右&#…...
前端八股文(CSS篇)二
目录 1.css中可继承与不可继承属性有哪些 2.link和import的区别 3.transition和animation的区别 4.margin和padding的使用场景 5.::before和:after的双冒号和单冒号有什么区别? 6.display:inline-block什么时候会显示间隙 7…...
系统架构设计师笔记
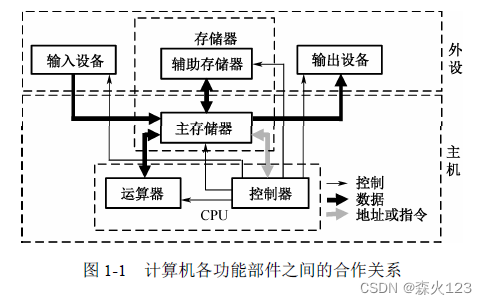
第1章计算机组成与体系结构 1.1.1计算机硬件的组成 (1)控制器。控制器是分析和执行指令的部件,也是统一指挥并控制计算机各部件协调工作的中心部件,所依据的是机器指令。控制器的组成包含如下。 ①程序计数器PC:存储下…...
Livox-Mid-360 固态激光雷达ROS格式数据分析
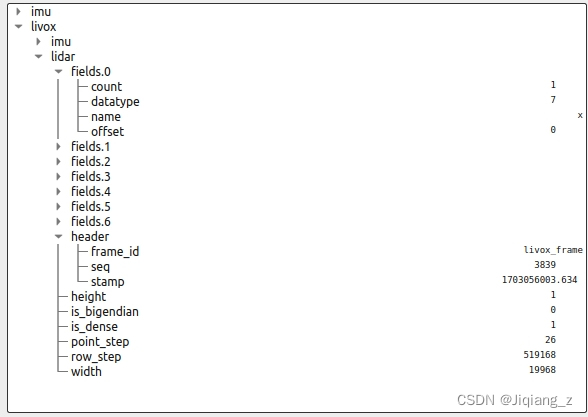
前言: Livox-Mid-360 官方采用livox_ros_driver2ROS功能包发布ROS格式的数据,livox_ros_driver2可以把Livox原始雷达数据转化成ROS格式并以话题的形式发布出去。 下面列举一些雷达的基本概念: 点云帧:雷达驱动每次向外发送的一…...
如何恢复 iPhone 上永久删除的照片?
2007年,苹果公司推出了一款惊天动地的智能手机,也就是后来的iPhone。你会惊讶地发现,迄今为止,苹果公司已经售出了 7 亿部 iPhone 设备。根据最新一项调查数据,智能手机利润的 95% 都进了苹果公司的腰包。 如此受欢迎…...

基于单片机的公交车站自动报站器设计与实现
一、摘要 随着城市交通的快速发展,公交车作为城市公共交通的主要工具,其便捷性和高效性得到了广泛的认可。然而,由于公交车站的广播系统存在一定的局限性,如人工报站容易出现失误、音量大小不一等问题,给乘客带来了不…...
python之Selenium WebDriver安装与使用
首先把python下载安装后,再添加到环境变量中,再打开控制台输入: pip install selenium 正常情况下是安装好的,检查一下“pip show selenium”命令,出现版本号就说明安装好了。 1:如果出现安装错误: 那就用“…...

【AI+教育】AI总犯“金鱼记忆”?揭秘大模型长期记忆架构,让它真正记住你!
在和AI对话时,你是否有过这样的抓狂时刻:前脚刚告诉它“我叫小明,我不吃香蕉”,五分钟后它又热情地向你推荐香蕉饼? 目前的多数大语言模型就像拥有“金鱼记忆”,一刷新就忘得一干二净。为了让智能体(Agent)能像真正的老朋友一样懂你,我们设计了一套长期记忆功能模块。…...

EDCNN在低剂量CT图像去噪中的边缘增强与复合损失优化策略
1. 低剂量CT图像去噪的挑战与EDCNN的突破 低剂量CT扫描在临床应用中越来越普遍,因为它能显著降低患者接受的辐射剂量。但随之而来的问题是图像噪声增加,这给医生的诊断带来了巨大挑战。传统去噪方法往往难以在噪声抑制和细节保留之间取得平衡࿰…...

手柄硬件校准与操控优化:从故障排查到竞技级设置的实战手册
手柄硬件校准与操控优化:从故障排查到竞技级设置的实战手册 【免费下载链接】DS4Windows Like those other ds4tools, but sexier 项目地址: https://gitcode.com/gh_mirrors/ds/DS4Windows 在《艾尔登法环》的 boss 战中,角色总是不受控制地缓慢…...

WechatFerry实战指南:5步构建高效微信机器人自动化系统
WechatFerry实战指南:5步构建高效微信机器人自动化系统 【免费下载链接】wechatferry 基于 WechatFerry 的微信机器人底层框架 项目地址: https://gitcode.com/gh_mirrors/wec/wechatferry WechatFerry是一个基于Node.js生态的微信机器人底层框架,…...

Path of Building:流放之路玩家必备的终极Build规划神器
Path of Building:流放之路玩家必备的终极Build规划神器 【免费下载链接】PathOfBuilding Offline build planner for Path of Exile. 项目地址: https://gitcode.com/GitHub_Trending/pa/PathOfBuilding 如果你正在玩《流放之路》并为复杂的Build规划感到头…...

RAG的墓志铭:当AI不再需要检索
上个月读到一篇在 Hacker News 上引发热议的文章——《The RAG Obituary: Killed by Agents, Buried by Context Windows》。作者 Nicolas Bustamante 是金融科技公司 Fintool 的创始人,他在文中抛出了一个颇具争议的观点:RAG(检索增强生成&a…...

nli-distilroberta-base惊艳案例:自动识别合同补充协议与主协议的潜在矛盾条款
nli-distilroberta-base惊艳案例:自动识别合同补充协议与主协议的潜在矛盾条款 1. 项目概述 在合同审查工作中,补充协议与主协议之间的条款一致性检查是法律从业者最头疼的问题之一。传统的人工比对方式不仅耗时费力,还容易遗漏关键矛盾点。…...

SDXL-Turbo快速上手:AutoDL开箱即用,零配置体验实时AI绘画
SDXL-Turbo快速上手:AutoDL开箱即用,零配置体验实时AI绘画 1. 什么是SDXL-Turbo SDXL-Turbo是StabilityAI推出的新一代实时AI绘画模型,它彻底改变了传统AI绘画需要等待数秒甚至数十秒才能看到结果的工作方式。基于创新的对抗扩散蒸馏技术(A…...

3MF格式与Blender从入门到精通:重塑3D打印工作流
3MF格式与Blender从入门到精通:重塑3D打印工作流 【免费下载链接】Blender3mfFormat Blender add-on to import/export 3MF files 项目地址: https://gitcode.com/gh_mirrors/bl/Blender3mfFormat 概念解析:为什么3MF正在取代STL成为行业新标准 …...

OFA模型微调实战:适配特定领域的小样本学习
OFA模型微调实战:适配特定领域的小样本学习 用最少的数据,让通用大模型听懂你的专业语言 1. 引言:当通用模型遇到专业领域 你有没有遇到过这样的情况:一个在通用场景下表现优秀的AI模型,一到你的专业领域就"水土…...