自动驾驶目标检测项目实战——基于深度学习框架yolov的交通标志检测
自动驾驶目标检测项目实战——基于深度学习框架yolov的交通标志检测
目前目标检测算法有很多,流行的就有faster-rnn和yolov,本文使用了几年前的yolov3框架进行训练,效果还是很好,当然也可以使用更高版本的Yolov进行实战。本代码使用的是keras框架,pytorch的yolov如何对数据集进行训练,可以参考我之前的文章:
工业缺陷检测项目实战(二)——基于深度学习框架yolov5的钢铁表面缺陷检测
跑工程的原理步骤都是一样的,都可以学习。
数据集准备
使用gtsrb交通标志数据集,下载链接:
https://www.kaggle.com/datasets/meowmeowmeowmeowmeow/gtsrb-german-traffic-sign
https://aistudio.baidu.com/aistudio/datasetdetail/97069
以上两个链接都可以下载,文件夹里面是这样:
Meta没什么用,主要是Test和Train,Test作为验证集使用。
基础代码准备
本工程基于开源代码进行修改:
https://github.com/miemie2013/Keras-DIOU-YOLOv3
环境
tensorflow==1.15.1
keras==2.3.1
其他看着来,缺什么pip install什么。
使用步骤
1.将数据集放在工程文件夹
2.生成train和test的txt文件
我这里写了一个csv转txt的代码:
代码如下:
import numpy as np
import pickle
import re
import os
from PIL import Image# Create raw data pickle file
data_raw = {}
class_list = []
box_coords_list = []
image_file_list = []with open('GTSRB/Test.csv', 'r') as f:next(f) # skip header linefor line in f: # 遍历每一行line = line[:-1] # 去掉换行符fields = line.split(',')image_file = fields[7]class_list.append(int(fields[6]))image_file_list.append(image_file)# Find box coordinates for all signs in this imagebox_coords = np.array([int(x) for x in fields[2:6]])box_coords_list.append(box_coords)# 写入txt内容
with open("GTSRB/val.txt", 'w+', encoding='utf-8') as f:for i in range(len(box_coords_list)):box_coord = ""box_coord += str(box_coords_list[i][0]) + ','box_coord += str(box_coords_list[i][1]) + ','box_coord += str(box_coords_list[i][2]) + ','box_coord += str(box_coords_list[i][3])d = image_file_list[i] + ' ' + box_coord + ',' + str(class_list[i])f.write(d + '\n')
路径根据自己的去修改即可。生成的txt放在annotation文件夹下。
txt文件格式如下:
xxx/xxx.jpg 18.19,6.32,424.13,421.83,20 323.86,2.65,640.0,421.94,20
xxx/xxx.jpg 48,240,195,371,11 8,12,352,498,14
# image_path x_min, y_min, x_max, y_max, class_id x_min, y_min ,..., class_id
# make sure that x_max < width and y_max < height
3.生成标签的类别txt文件
在data文件夹下,生成txt的文件来表示类名:
比如这里有43个类,则我们可以先用数字字符表示,等检测完再转回对于的类名:
一行表示一个类名,注意此处类名不能有空格,比如以下是错误的例子:
每一行都存在空格,这样在计算mAP的时候会报错。
数据已准备完毕。
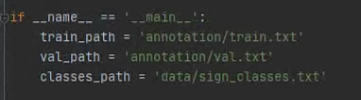
4.修改文件路径
主要是修改train.py文件里面的这三个路径:
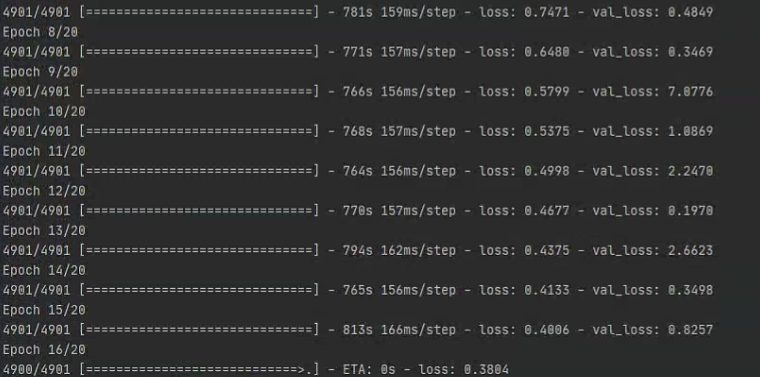
5.训练
运行
python train.py
6.注意
引用github源码大佬的话:
(1)本仓库有pattern=0、pattern=1、pattern=2这3种训练模式。 0-从头训练,1-读取model_body继续训练(包括解冻,但需要先运行1_lambda2model.py脚本取得model_body),2-读取coco预训练模型训练 你只需要修改pattern的值即可指定训练模式。 然后在这3种模式的if-else分支下,你再指定批大小batch_size、学习率lr等超参数。
(2)如果你决定从头训练一个模型(即pattern=0),而且你的显卡显存比较小,比如说只有6G。 又或者说你想训练一个小模型,因为你的数据集比较小。 那么你可以设置initial_filters为一个比较小的值,比如说8。 initial_filters会影响到后面的卷积层的卷积核个数(除了最后面3个卷积层的卷积核个数不受影响)。 yolov3的initial_filters默认是32,你调小initial_filters会使得模型变小,运算量减少,适合在小数据集上训练。
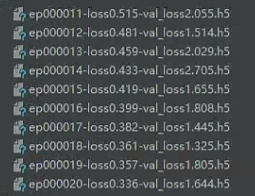
7.训练完之后,可以得到以下h5文件:
运行
python 1_lambda2model.py
将训练模型中yolov3的所有部分提取出来。我这里得到aaaa_bgr.h5
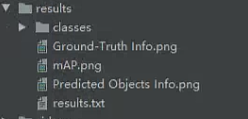
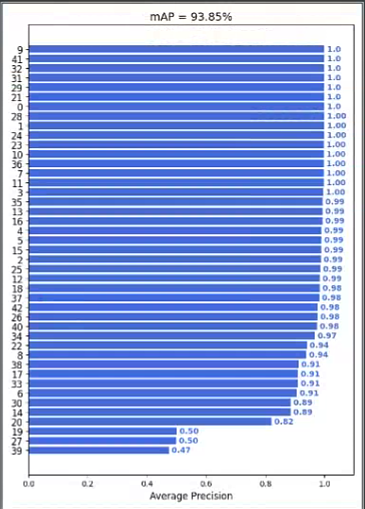
8.mAP评估
运行evaluate_kr.py对keras模型(1_lambda2model.py提取出来的模型)评估,跑完这个脚本后需要再跑mAP/main.py进行mAP的计算。计算完之后会保持结果图:
9.测试
在images/test里面放置要检测的图片:
运行
python demo_kr.py
比如识别:
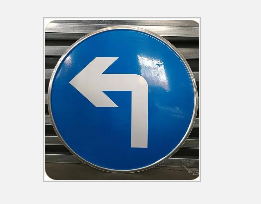
识别结果:
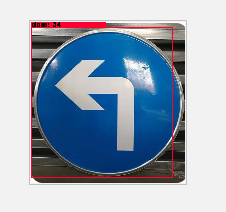
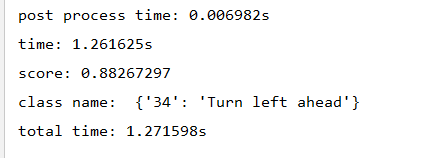
另外,我添加了绘制acc和loss的曲线图,也对过滤了识别分数地的框。
需要整体代码的可私信我
相关文章:
自动驾驶目标检测项目实战——基于深度学习框架yolov的交通标志检测
自动驾驶目标检测项目实战——基于深度学习框架yolov的交通标志检测 目前目标检测算法有很多,流行的就有faster-rnn和yolov,本文使用了几年前的yolov3框架进行训练,效果还是很好,当然也可以使用更高版本的Yolov进行实战。本代码使…...

flink兼容性验证
flink介绍:https://blog.csdn.net/weixin_43563705/article/details/107604693 一、安装启动 安装flink及其依赖 yum install java-1.8.0-openjdk curl tar mkdir -p /usr/local/flink wget https://mirrors.aliyun.com/apache/flink/flink-1.16.1/flink-1.16.1-bi…...
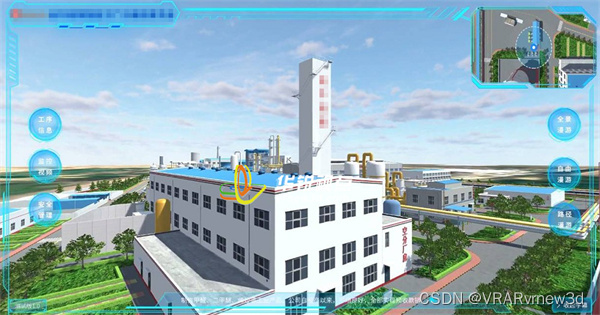
智慧工厂数字孪生可视化监测系统有效提升厂区安全管控效力
我国制造业正处于产业升级的关键时期,基于数据进行生产策略制定与管理是大势所趋,而数据可视化以更直观的方式成为数据分析传递信息的重要工具。 深圳华锐视点通过三维可视化手段对工厂各类设备进行三维建模,真实复现设备设施外观、结构、运转…...

c++中基本类型详细解释外加基本运算规则
👀👀#c中包括算数类型和空类型。 类型含义wchat_t宽字符bool布尔类型char字符chat16_tunicode字符chat_32unicode字符short短整型int整形long长整型longlong长整型float单精度浮点型double双精度浮点型longdouble扩展精度浮点型 👀…...

扬帆优配“机器人+”方案加码产业发展,这些股有望高增长
“机器人”发明新需求,2022年中国机器人市场规模约为174亿美元。 美国时刻3月1日,特斯拉在得克萨斯州超级工厂举办投资者日活动,展示了人形机器人Optimus的视频,更夸大的是,视频中的机器人好像在制作另一个机器人&…...

推送投票制作微信推送里投票制作教程在线投票活动制作
近些年来,第三方的微信投票制作平台如雨后春笋般络绎不绝。随着手机的互联网的发展及微信开放平台各项基于手机能力的开放,更多人选择微信投票小程序平台,因为它有非常大的优势。1.它比起微信公众号自带的投票系统、传统的H5投票系统有可以图…...
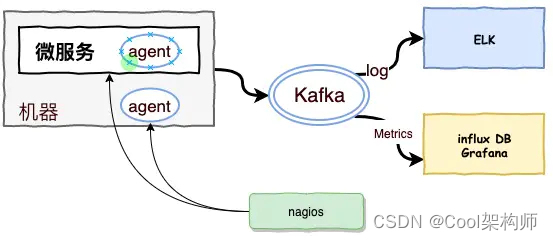
【架构师】跟我一起学架构——微服务分层监控
博客昵称:架构师Cool 最喜欢的座右铭:一以贯之的努力,不得懈怠的人生。 作者简介:一名Coder,软件设计师/鸿蒙高级工程师认证,在备战高级架构师/系统分析师,欢迎关注小弟! 博主小留言…...
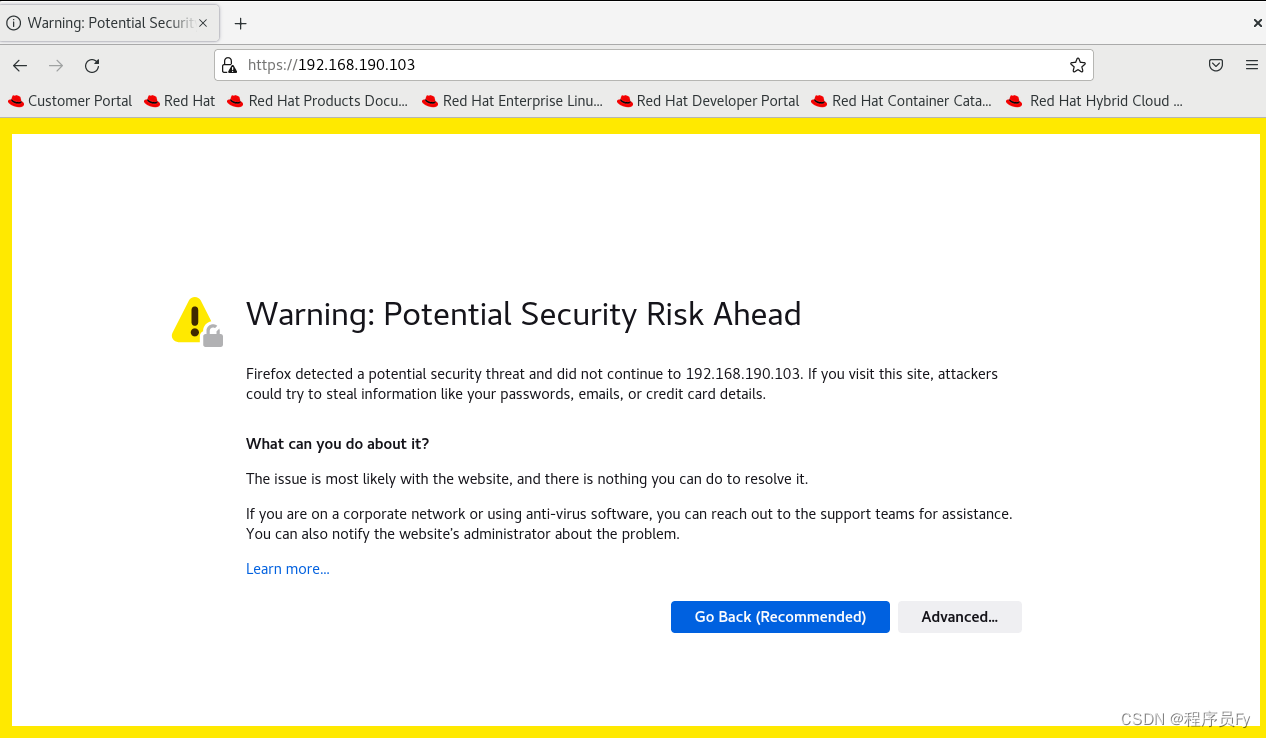
Linux:https静态网站搭建案例
目录介绍httpshttps通信过程例介绍https 整个实验是在http实验基础上进行的 因为http协议在传输的时候采用的是明文传输,有安全隐患,所以出现了https(安全套接字层超文本传输协议) HTTPS并不是一个新协议, 而是HTTP…...

前端css整理
如何水平垂直居中一个盒子? 1.已知高度:子盒子设置 display: inline-block; 父盒子设置 line-height 等于高度实现垂直居中;使用 text-align:center实现水平居中 2.父盒子 display:flex; align-items:center;justify-content:center; 3.定位&…...

混凝土搅拌站远程监控解决方案
一、项目背景 随着大规模的基础设施建设,对混凝土搅拌设备的需求量日益增加,对其技术指标的要求也日益提高,其技术性能将直接关系到工程的质量和使用寿命。而混凝土生产的质量是在生产过程中形成的,而非最终强度的检测。混凝土生…...

Spark SQL 学习总结
文章目录(一)Spark SQL(二)SParkSession(三)DataFrame常见算子操作(四)DataFrame的sql操作(五)RDD转换为DataFrame(1)反射方式&#x…...

深度学习 - 37.TF x Keras Deep Cross Network DCN 实现
目录 一.引言 二.模型简介 1.Embedding and stacking layer 2.Cross Network 2.1 模型架构分析 2.2 计算逻辑...
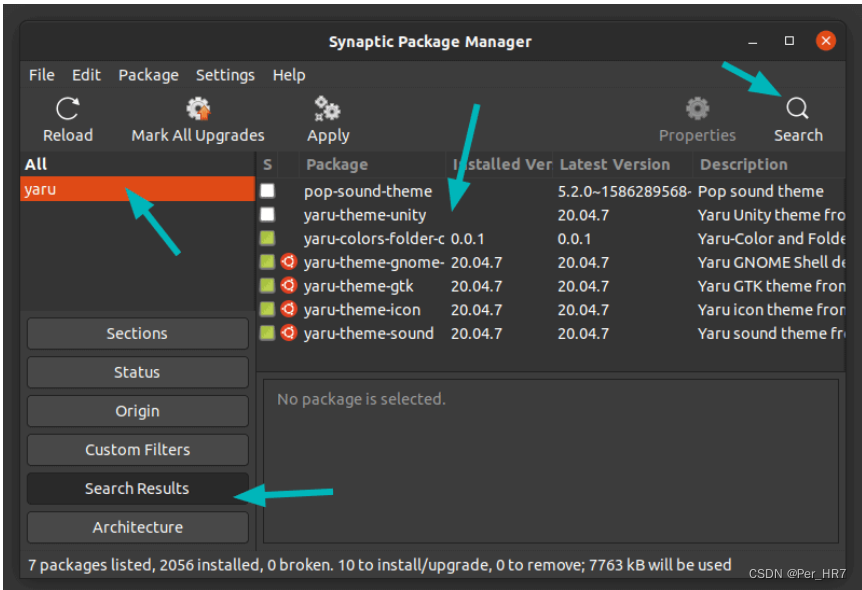
Ubuntu中使用Synaptic进行包管理
Synaptic概况 Synaptic 是一个轻量级的 apt 软件包管理器系统的 GUI 前端,所有你可以在终端中使用 apt-get 命令来做的事,都可以通过 Synaptic 来实现。优势 图形化安装界面,同时可以安装配置相关依赖,避免由于依赖问题导致的各类…...

python之selenium库安装及用法(定位法、获取文本、文本框输入、鼠标点击、滑动滚动条)
一、selenium库安装 pip install selenium二、浏览器驱动安装 谷歌浏览器驱动下载地址:https://chromedriver.storage.googleapis.com/index.html 根据你电脑的谷歌浏览器版本,下载相应的就行。我下载的是110.0.5481.XX中的chromedriver_win32.zip 下载…...

FPGA纯verilog实现图像视频旋转 串口指令控制旋转角度 提供工程源码和技术支持
目录1、前言2、理论基础3、设计思路和框架图像输入和采集图像旋转处理图像缓存图像输出4、vivado工程详解5、上板调试验证6、福利:工程代码的获取1、前言 图像旋转是一种常用的图像处理技术,其基本原理就是指图像以某一点为中心旋转一定的角度ÿ…...

EventGraph:Event Extraction as Semantic Graph Parsing 论文解读
EventGraph: Event Extraction as Semantic Graph Parsing 论文:2022.case-1.2.pdf (aclanthology.org) 代码:huiling-y/EventGraph (github.com) 期刊/会议:CASE 2022 摘要 事件抽取涉及到事件触发词和相应事件论元的检测和抽取。现有系…...

【蓝桥杯集训·每日一题】AcWing 3696. 构造有向无环图
文章目录一、题目1、原题链接2、题目描述二、解题报告1、思路分析2、时间复杂度3、代码详解三、知识风暴拓扑排序一、题目 1、原题链接 3696. 构造有向无环图 2、题目描述 给定一个由 n 个点和 m 条边构成的图。 不保证给定的图是连通的。 图中的一部分边的方向已经确定&#…...
国内vs国外:外贸建站该如何选择?
外贸建站找国内还是国外? 答案是:国内。 随着互联网的发展,越来越多的企业开始意识到在网络上进行商业活动的重要性。 其中,建立一个专业的外贸网站是企业在国际市场上拓展业务的关键。 然而,对于选择国内还是国外…...

HLS协议有哪些特别优势
阿酷TONY / 2023-3-3 / 长沙 可以实现码率的动态自适应,清晰度动态成为可能;HLS是基于HTTP 协议的,更易于做各平台的适配与兼容;多终端跨平台的支持性: PC端, Android端, IOS 平台,微信之类的都支持&am…...

JavaScript里的回调函数属于闭包吗?
回调函数本身不一定属于闭包,但是在某些情况下,它们可能会涉及闭包。 回调函数通常是指在异步操作完成时执行的函数。它们在 JavaScript 中被广泛使用,例如在处理 AJAX 请求、定时器、事件处理程序等方面。 在使用回调函数时,如…...

什么是自动化测试?工具、类型与最佳实践完全指南
自动化测试已经成了现代 QA 团队的默认工作方式。与其花上好几个小时手动点击按钮、填写表单、反复检查缺陷(结果还是在生产环境漏掉一个),测试人员更愿意写一次脚本,剩下的交给机器。脚本可以模仿用户操作、标记问题,把原本消耗在重复劳动上的时间还给团队,让大家去做更…...

AI与地缘政治双重冲击下,内存市场产能大迁移与供应链危机
1. 风暴之眼:当AI狂潮撞上地缘断供如果你最近想给电脑加条内存或者换个固态硬盘,大概率会被价格吓一跳。这不仅仅是简单的“涨价”,而是整个存储市场的底层逻辑正在被两股巨力彻底重塑。一边是AI数据中心对高性能内存近乎贪婪的吞噬ÿ…...
)
SAP ABAP OData 接口开发核心知识点梳理(含详图)
在SAP S/4HANA项目开发与前后端对接场景中,OData接口几乎是目前企业最主流、最核心的数据交互方案。无论是SAP Fiori前端页面开发、第三方系统对接、移动端集成,还是外部系统读写SAP业务数据,基本都依赖OData服务实现标准化、轻量化的数据通信…...

通过Taotoken CLI工具一键配置团队开发环境与统一API密钥
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过Taotoken CLI工具一键配置团队开发环境与统一API密钥 基础教程类,介绍如何利用Taotoken提供的命令行工具ÿ…...

渗透测试之信息收集:这些技巧决定了渗透成败
渗透测试之信息收集:这些技巧决定了渗透成败作者:浅木先生前言 做渗透测试久了,你会越来越认同一个观点:信息收集的质量直接决定渗透测试的成败。 同样的目标URL,不同人扫出来的结果完全不同——有人只能扫出后台登录页…...

2026公考培训机构综合评测:粉笔教育领跑,线上线下一体化成关键优势
【评测说明】 2026年公考培训市场持续分化,考生在选择机构时,不再只看“名师”或“价格”,而是综合考量上榜概率、资金安全、学习便捷性。本文从上岸数据可验证性、性价比、退费效率、师资体系稳定性、线上线下覆盖能力五大维度,对…...

Angular 17与Firebase全栈实战:从零构建现代化Web应用
1. 项目概述:一个基于 Angular 17 的现代化 Web 应用最近接手并重构了一个名为 Ditectrev 的 Web 项目,它本质上是一个功能性的前端应用,旨在解决特定领域的信息展示与交互需求。这个项目最初由 Angular CLI 17.3.17 生成,但原始的…...

斯坦福CS229机器学习中文教程:从零到一的实战学习指南
斯坦福CS229机器学习中文教程:从零到一的实战学习指南 【免费下载链接】Stanford-CS-229 A Chinese Translation of Stanford CS229 notes 斯坦福机器学习CS229课程讲义的中文翻译 项目地址: https://gitcode.com/gh_mirrors/st/Stanford-CS-229 你是否曾因英…...

别再为地址映射头疼了!台达DVP50MC11T与西门子/欧姆龙PLC的Modbus通信差异对比
台达DVP50MC11T与主流PLC的Modbus通信地址映射实战解析 在工业自动化项目中,Modbus通信协议因其简单可靠的特点被广泛应用。但对于熟悉西门子或欧姆龙PLC的工程师来说,初次接触台达DVP50MC11T系列时,往往会对其特殊的地址映射方式感到困惑。…...

MUMmer4 v4.0.0技术升级:基因组比对工具标准化与容器化部署深度解析
MUMmer4 v4.0.0技术升级:基因组比对工具标准化与容器化部署深度解析 【免费下载链接】mummer Mummer alignment tool 项目地址: https://gitcode.com/gh_mirrors/mu/mummer MUMmer4作为生物信息学领域广泛使用的基因组比对工具,最新发布的v4.0.0版…...