算法29:不同路径问题(力扣62和63题)--针对算法28进行扩展
题目:力扣(LeetCode)官网 - 全球极客挚爱的技术成长平台
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish” )。
问总共有多少条不同的路径?
分析:
假设为3行2列的二维数组
1. 向右---向下---向下
2. 向下---向下---向右
3. 向下--向右---向下
可以推导
1. 一直向右和一直向下,每种走法只有1种走法,没有其他可以旋转的空间。因此
| 1 | 1 |
| 1 | 2 |
| 1 |
2 、那么到达dp[1][1] 的走法就是 1 + 1 = 2;
3. 那么到达右下角dp[2][1] 就是 2 + 1 = 3; 即3种走法
分析2:
假设有3行7列
1. 按行走,只有1种走法
2、按列走,只有一种走法,可得
| 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| 1 | ||||||
| 1 |
那么dp[1][1] 就是 dp[0][1] + dp[1][0] 即 1+ 1 = 2;依次类推可得
| 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 1 |
第三行还是按照这种方式推导,可得
| 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 1 | 3 | 6 | 10 | 15 | 21 | 28 |
因此,针对3行7列的二维数组,可得28种走法
代码实现:
public int uniquePaths(int m, int n) {int[][] dp = new int[m][n];//第一行都为1for (int col = 0; col < n; col++) {dp[0][col] = 1;}//第一列都为1for (int row = 0; row < m; row++) {dp[row][0] = 1;}for (int row = 1; row < m; row++) {for(int col = 1; col < n; col++) {dp[row][col] = dp[row][col - 1] + dp[row - 1][col];}}return dp[m-1][n-1];}还是一样的问题,以上代码的时间复杂度为O(m*n), 空间复杂度也为O(m*n). 如果100行100列的二维数组,将浪费100*100的空间复杂度。
空间压缩进行优化:
public int uniquePaths2(int m, int n) {int[] dp = new int[n];//第一行都为1for (int col = 0; col < n; col++) {dp[col] = 1;}for (int row = 1; row < m; row++) {dp[0] = 1;for (int col = 1; col < n; col++) {dp[col] = dp[col -1] + dp[col];}}return dp[n -1];}完整代码:
package code03.动态规划_07.lesson4;//力扣62题
// https://leetcode.cn/problems/unique-paths/description/
public class DiffPathSum_02 {public int uniquePaths(int m, int n) {int[][] dp = new int[m][n];//第一行都为1for (int col = 0; col < n; col++) {dp[0][col] = 1;}//第一列都为1for (int row = 0; row < m; row++) {dp[row][0] = 1;}for (int row = 1; row < m; row++) {for(int col = 1; col < n; col++) {dp[row][col] = dp[row][col - 1] + dp[row - 1][col];}}return dp[m-1][n-1];}public int uniquePaths2(int m, int n) {int[] dp = new int[n];//第一行都为1for (int col = 0; col < n; col++) {dp[col] = 1;}for (int row = 1; row < m; row++) {dp[0] = 1;for (int col = 1; col < n; col++) {dp[col] = dp[col -1] + dp[col];}}return dp[n -1];}
}
力扣测试通过:
题目:力扣63题: 力扣(LeetCode)官网 - 全球极客挚爱的技术成长平台
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish”)。
现在考虑网格中有障碍物。那么从左上角到右下角将会有多少条不同的路径?
网格中的障碍物和空位置分别用 1 和 0 来表示。
分析:
1. 这一题其实跟上面一体解法相同,唯一的不同之处是有障碍物。
2. 第一行和第一列遇到障碍物,那么后面的路都走不通而已
3. 后面的推导,当前方格为障碍物,设置0代表走不通;如果不为0,则按照原有逻辑进行推导即可
完整代码:
package code03.动态规划_07.lesson4;//力扣63题
// https://leetcode.cn/problems/unique-paths-ii/description/
public class DiffPathSum_03 {//时间复杂度 O(m*n), 空间复杂度 O(m*n)public int uniquePathsWithObstacles(int[][] obstacleGrid) {int m = obstacleGrid.length;int n = obstacleGrid[0].length;//obstacleGrid[0][0] == 1 代表左上角第一个就是障碍物//obstacleGrid[m-1][n-1] == 1 代表右下角最后一个是障碍物if (obstacleGrid == null|| obstacleGrid.length == 0|| obstacleGrid[0][0] == 1|| obstacleGrid[m-1][n-1] == 1) {return 0;}int[][] dp = new int[m][n];//处理第一行dp[0][0] = 1;for (int col = 1; col < n; col++) {//如果当前列为1, 或者前一列为0. 代表遇到障碍物。后面路走不通,全部变为0if (obstacleGrid[0][col] == 1 || dp[0][col -1] == 0) {dp[0][col] = 0;} else {//第一行只有1条路dp[0][col] = 1;}}//处理第一列for (int row = 1; row < m; row++) {//如果当前列为1, 或者上一列为0. 代表遇到障碍物。后面路走不通,全部变为0if (obstacleGrid[row][0] == 1 || dp[row-1][0] == 0) {dp[row][0] = 0;} else {//第一行只有1条路dp[row][0] = 1;}}for (int row = 1; row < m; row++) {for(int col = 1; col < n; col++) {//如果当前列有障碍物,此条路走不通。当前列的值变为0//否则,按照原有的逻辑进行计算dp[row][col] = obstacleGrid[row][col] == 1 ? 0: dp[row][col - 1] + dp[row - 1][col];}}return dp[m-1][n-1];}//空间压缩//时间复杂度 O(m*n), 空间复杂度 O(n)public int uniquePathsWithObstacles2(int[][] obstacleGrid) {int m = obstacleGrid.length;int n = obstacleGrid[0].length;//obstacleGrid[0][0] == 1 代表左上角第一个就是障碍物//obstacleGrid[m-1][n-1] == 1 代表右下角最后一个是障碍物if (obstacleGrid == null|| obstacleGrid.length == 0|| obstacleGrid[0][0] == 1|| obstacleGrid[m-1][n-1] == 1) {return 0;}int[] dp = new int[n];//处理第一行dp[0] = 1;for (int col = 1; col < n; col++) {//如果当前列为1, 或者前一列为0. 代表遇到障碍物。后面路走不通,全部变为0if (obstacleGrid[0][col] == 1 || dp[col -1] == 0) {dp[col] = 0;} else {//第一行只有1条路dp[col] = 1;}}for (int row = 1; row < m; row++) {//当前列为障碍物或者上一列为障碍物,都走不通。dp[0] = (obstacleGrid[row][0] == 1 || dp[0] == 0) ? 0 : 1;for(int col = 1; col < n; col++) {//如果当前列有障碍物,此条路走不通。当前列的值变为0//否则,按照原有的逻辑进行计算dp[col] = obstacleGrid[row][col] == 1 ? 0 : dp[col -1] + dp[col];}}return dp[n-1];}public static void main(String[] args) {DiffPathSum_03 test = new DiffPathSum_03();int[][] arr = {{0, 0, 0},{0, 1, 0},{0, 0, 0}};System.out.println(test.uniquePathsWithObstacles2(arr));}
}
相关文章:
算法29:不同路径问题(力扣62和63题)--针对算法28进行扩展
题目:力扣(LeetCode)官网 - 全球极客挚爱的技术成长平台 一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。 机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角࿰…...

openGauss学习笔记-188 openGauss 数据库运维-常见故障定位案例-core问题定位
文章目录 openGauss学习笔记-188 openGauss 数据库运维-常见故障定位案例-core问题定位188.1 磁盘满故障引起的core问题188.1.1 问题现象188.1.2 原因分析188.1.3 处理办法 188.2 GUC参数log_directory设置不正确引起的core问题188.2.1 问题现象188.2.2 原因分析188.2.3 处理办…...
kubernetes入门到进阶(5)
目录 镜像仓库:怎么用好docker hub这个宝藏 什么是镜像仓库(Registry) 什么是docker hub 如何在docker hub上挑选镜像 docker hub上进行概念股命名规则是什么 该怎么上传自己的镜像 离线环境该怎么办 小结 镜像仓库:怎么用好docke…...
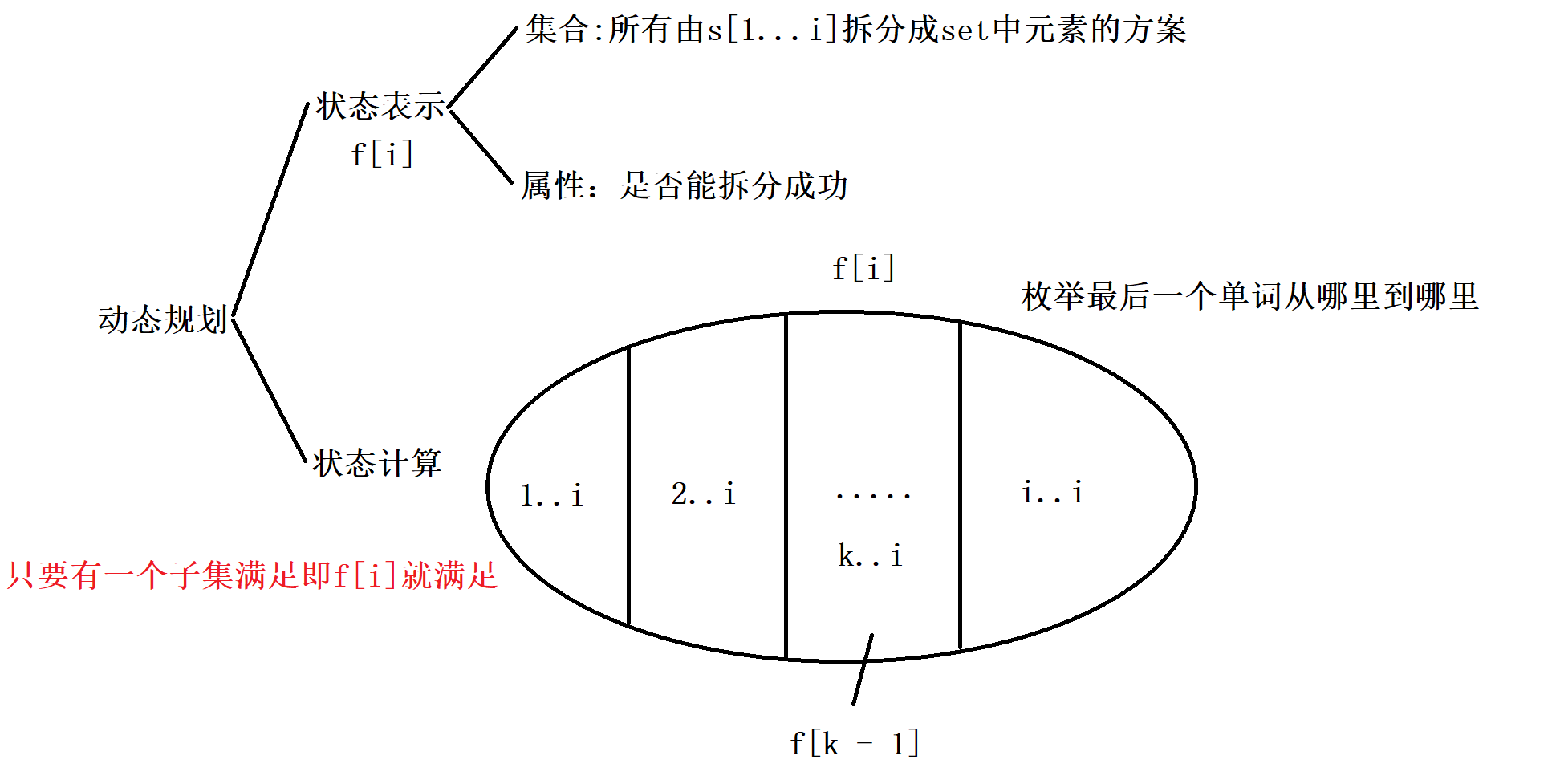
【字典树Trie】LeetCode-139. 单词拆分
139. 单词拆分。 给你一个字符串 s 和一个字符串列表 wordDict 作为字典。请你判断是否可以利用字典中出现的单词拼接出 s 。 注意:不要求字典中出现的单词全部都使用,并且字典中的单词可以重复使用。 示例 1: 输入: s "leetcode&q…...

pytest常用的第三方插件介绍
本节介绍了如何安装和使用第三方插件。如果你想要编写自己的插件,请参阅“编写插件”。 通过pip可以轻松安装第三方插件: pip install pytest-NAME pip uninstall pytest-NAME如果已经安装了插件,pytest会自动找到并集成它,无需手…...
【经验】VSCode连接远程服务器(可以使用git管理、方便查看和编辑Linux源码)
1、查看OpenSSH Windows10通常自带OpenSSH不需要安装。 Windows10下检查是否已经安装OpenSSH的方法: 1)按下快捷键Win + X,选择Windows PoweShell(管理员) 2)输入以下指令: Get-WindowsCapability -Online | ? Name -like ‘OpenSSH*’ 3)如果电脑未安装OpenSSH,…...

机器学习-生存分析:如何基于随机生存森林训练乳腺癌风险评估模型?
一、 引言 乳腺癌是女性最常见的恶性肿瘤之一,也是全球范围内女性死亡率最高的癌症之一。据统计,每年全球有超过200万人被诊断为乳腺癌,其中约60万人死于该疾病。因此,乳腺癌的早期诊断和风险评估对于预防和治疗乳腺癌具有非常重要…...

MySQL学习笔记1: 数据库的简单介绍
目录 1. 数据库是什么2. 数据库这一类软件中的一些典型代表2.1. Oracle2.2. MySQL2.3. SQL Server2.4. SQLite (lite 轻量版) 3. 数据库的类型3.1. 关系型数据库3.2. 非关系型数据库 4. 总结 1. 数据库是什么 数据库是一类软件,这一类软件可以用来管理数据…...
)
【Docker】安装ELK(Docker Compose)
一、创建挂载目录 mkdir -p /docker/elk/elasticsearch/{plugins,data} mkdir -p /docker/elk/logstash 二、给目录授权 chmod 777 /docker/elk/elasticsearch/data 创建logstash配置文件 vim /docker/elk/logstash/logstash.conf input {tcp {mode => "server" h…...

【机器学习:欧氏距离 】机器学习中欧氏距离的理解和应用
【机器学习:欧氏距离 】机器学习中欧氏距离的理解和应用 距离公式二维更高的维度点以外的物体属性欧几里得距离的平方概括历史 在数学中,欧氏距离’是指欧氏空间中任意两点之间的直线距离。这种距离可以通过应用勾股定理来计算,利用两点的笛卡…...

系统安全及应用
1、基本安全措施 1.1、系统账号清理 在Linux系统中,除了用户手动创建的各种账号之外,还包括随系统或程序安装过程而生产的其他大量账号。除了超级用户root之外,其他大量账号只是用来维护系统运作、启动或保持服务进程,一般是不允…...

Danil Pristupov Fork(强大而易用的Git客户端) for Mac/Windows
在当今软件开发领域,团队协作和版本控制是非常重要的方面。在这个过程中,Git成为了最受欢迎的版本控制工具之一。然而,对于Git的使用,一个好的客户端是至关重要的。 今天,我们要为大家介绍一款强大而易用的Git客户端—…...
最新GPT4.0使用教程,AI绘画,ChatFile文档对话总结+GPT语音对话使用,DALL-E3文生图
一、前言 ChatGPT3.5、GPT4.0、GPT语音对话、Midjourney绘画,文档对话总结DALL-E3文生图,相信对大家应该不感到陌生吧?简单来说,GPT-4技术比之前的GPT-3.5相对来说更加智能,会根据用户的要求生成多种内容甚至也可以和…...

【ARM 嵌入式 编译系列 7.2 -- GCC 链接脚本中 DEFINED 函数与 “AT>“ 符号详细介绍】
文章目录 GCC 链接脚本中 DEFINED 函数DEFINED() 函数> (放置在哪个区域)AT> (加载地址) (填充字节) 在链接脚本中,组合示例 GCC 链接脚本中 DEFINED 函数 在 ARM GCC 链接脚本(.ld 文件)中,DEFINED() 是一种内置函数&…...
Linux基础——进程初识(二)
1. 对当前目录创建文件的理解 我们知道在创建一个文件时,它会被默认创建到当前目录下,那么它是如何知道当前目录的呢? 对于下面这样一段代码 #include <stdio.h> #include <unistd.h>int main() {fopen("tmp.txt", …...
国科大图像处理2024速通期末——汇总2017-2019、2023回忆
国科大2023.12.28图像处理0854期末重点 图像处理 王伟强 作业 课件 资料 一、填空 一个阴极射线管它的输入与输出满足 s r 2 sr^{2} sr2,这将使得显示系统产生比希望的效果更暗的图像,此时伽马校正通常在信号进入显示器前被进行预处理,令p…...
)
编程笔记 html5cssjs 026 HTML输入类型(2/2)
编程笔记 html5&css&js 026 HTML输入类型(2/2) 输入类型:date输入类型:color输入类型:range输入类型:month输入类型:week输入类型:time输入类型:datetime输入类型…...
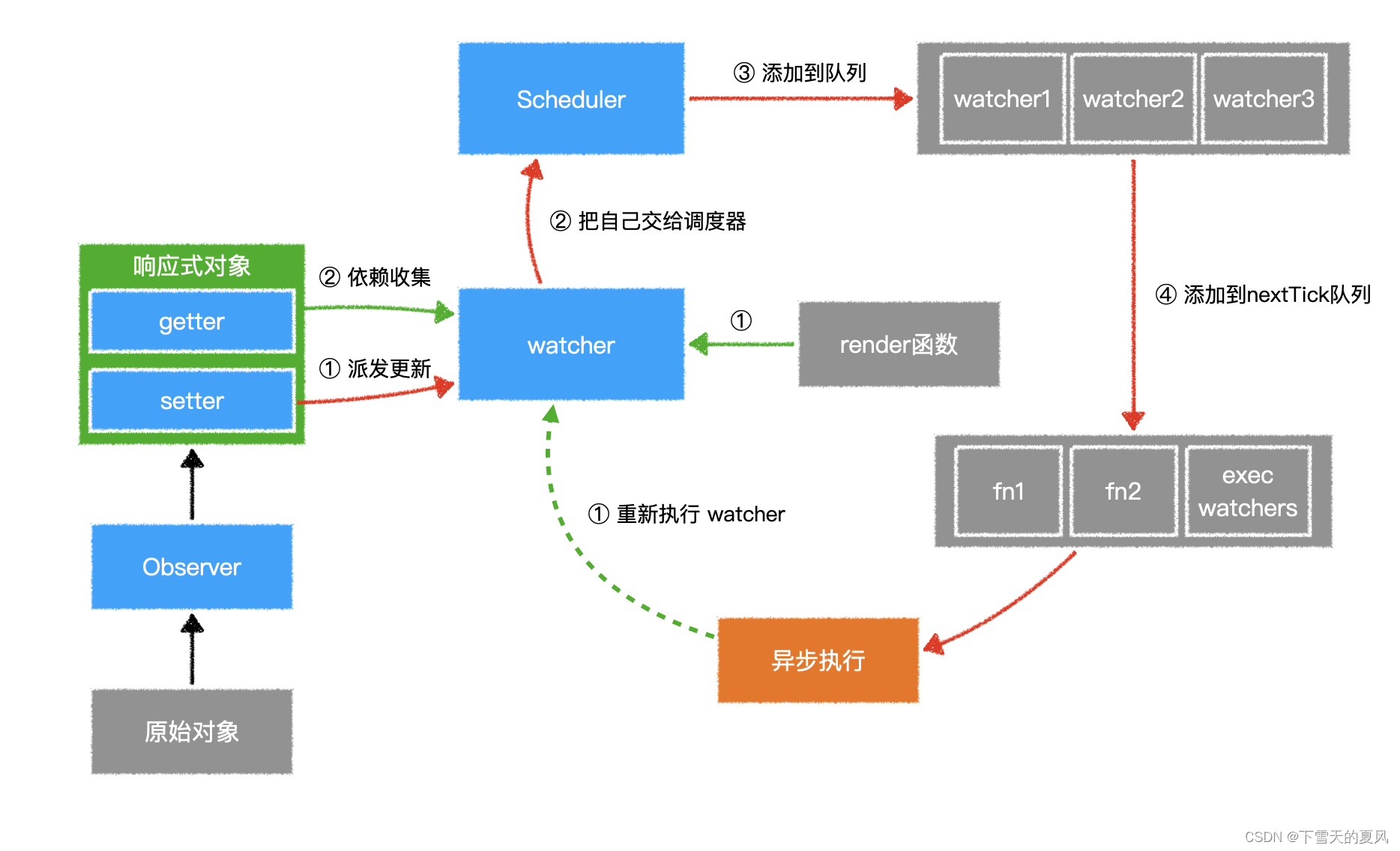
Vue2 - 数据响应式原理
目录 1,总览2,Observer3,Dep4,Watcher5,Schedule 1,总览 vue2官网参考 简单介绍下上图流程:以 Data 为中心来说, Vue 会将传递给 Vue 实例的 data 选项(普通 js 对象&a…...

基于华为云解析服务实现网站区域封禁
前言 中国大陆以外的网络攻击不断,个人博客时常遭受不明个人或组织的攻击,给网站的安全运行带来了巨大的风险,同时DDoS、CC攻击等还会消耗服务器的资源,站长可能需要因此支付高昂的服务器、CDN的流量费用。 因此,如果…...

在 Docker 中配置 MySQL 数据库并初始化 Project 项目
1. 文件准备 1.1. 添加 SQL 文件头部内容 每个 SQL 文件的头部需要添加以下内容: DROP DATABASE IF EXISTS xx_..; CREATE DATABASE xx_..; USE xx_..;1.2. 修改 AUTO_INCREMENT 在每个 SQL 文件中,将 AUTO_INCREMENT 修改为 1。 1.3. 插入机型 在 SQL…...

153.YOLOv8 从数据集下载到 ONNX 部署
摘要 目标检测是计算机视觉领域的核心任务之一,YOLO系列算法凭借其单阶段检测架构和实时推理能力,成为工业界部署的首选方案。本文从零开始,系统讲解YOLOv8的完整使用流程,涵盖环境搭建、数据集构建、模型训练、评估与部署全链路。所有代码均基于Ultralytics官方库,提供可…...

2026年腾讯云部署OpenClaw/Hermes Agent 配置Token Plan怎么快速上手?看这篇
2026年腾讯云部署OpenClaw/Hermes Agent 配置Token Plan怎么快速上手?看这篇。OpenClaw是开源的个人AI助手,Hermes Agent则是一个能自我进化的AI智能体框架。阿里云提供计算巢、轻量服务器及无影云电脑三种部署OpenClaw 与 Hermes Agent的方案、百炼Toke…...

从排版混乱到学术规范:NKThesis LaTeX模板的中文标题架构演进之路
从排版混乱到学术规范:NKThesis LaTeX模板的中文标题架构演进之路 【免费下载链接】NKThesis 南开大学硕士毕业论文/博士论文模板 (Latex Template for Nankai University) 项目地址: https://gitcode.com/gh_mirrors/nk/NKThesis 在学术写作的数字化浪潮中&…...

终极ZPL虚拟打印机指南:5步实现无硬件条码标签开发
终极ZPL虚拟打印机指南:5步实现无硬件条码标签开发 【免费下载链接】Virtual-ZPL-Printer An ethernet based virtual Zebra Label Printer that can be used to test applications that produce bar code labels. 项目地址: https://gitcode.com/gh_mirrors/vi/V…...

怎样快速删除背景?2026年免费工具实测对比,找到最简单的抠图方法
图片背景删除已经成为日常工作中的常见需求——无论是制作证件照、电商商品图,还是社交媒体头像,都离不开一个靠谱的背景去除工具。但市面上的工具五花八门,从专业软件到在线应用,从手机App到小程序,到底哪个才是最简单…...

在Ubuntu上快速搭建LVGL模拟器开发环境
1. 为什么选择Ubuntu搭建LVGL模拟器 LVGL作为当下最流行的嵌入式图形库之一,以其高度可裁剪性和低资源占用的特性赢得了广大开发者的青睐。在实际开发中,我们经常需要先在PC端完成界面原型设计,再移植到嵌入式设备。Ubuntu作为Linux发行版中的…...

Open-Meteo:高性能开源天气API架构深度解析与技术实践
Open-Meteo:高性能开源天气API架构深度解析与技术实践 【免费下载链接】open-meteo Free Weather Forecast API for non-commercial use 项目地址: https://gitcode.com/GitHub_Trending/op/open-meteo 技术痛点与解决方案定位 传统天气数据服务面临三大技术…...

ARM架构TRFCR_EL2寄存器解析与虚拟化调试应用
1. ARM架构TRFCR_EL2寄存器深度解析在ARMv8/v9体系结构中,TRFCR_EL2(Trace Filter Control Register at EL2)是一个关键的系统寄存器,专门用于管理EL2(Hypervisor)级别的追踪过滤行为。这个寄存器在虚拟化环…...

如何在5分钟内用Python获取同花顺问财金融数据?
如何在5分钟内用Python获取同花顺问财金融数据? 【免费下载链接】pywencai 获取同花顺问财数据 项目地址: https://gitcode.com/gh_mirrors/py/pywencai 你是否曾经为了获取金融数据而花费大量时间编写爬虫,却总是面临反爬机制和接口变动的困扰&a…...

ncmdump终极指南:3步快速解锁网易云音乐NCM加密文件的完整免费解决方案
ncmdump终极指南:3步快速解锁网易云音乐NCM加密文件的完整免费解决方案 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 还在为网易云音乐下载的歌曲只能在特定客户端播放而烦恼吗?ncmdump这款强大的NCM解密工…...