最优化理论分析复习--最优性条件(一)
文章目录
- 上一篇
- 无约束问题的极值条件
- 约束极值问题的最优性条件
- 基本概念
- 只有不等式约束时
- 下一篇
上一篇
最优化理论复习–对偶单纯形方法及灵敏度分析
无约束问题的极值条件
由于是拓展到向量空间 R n R^n Rn, 所以可由高数中的极值条件进行类比
-
一阶必要条件
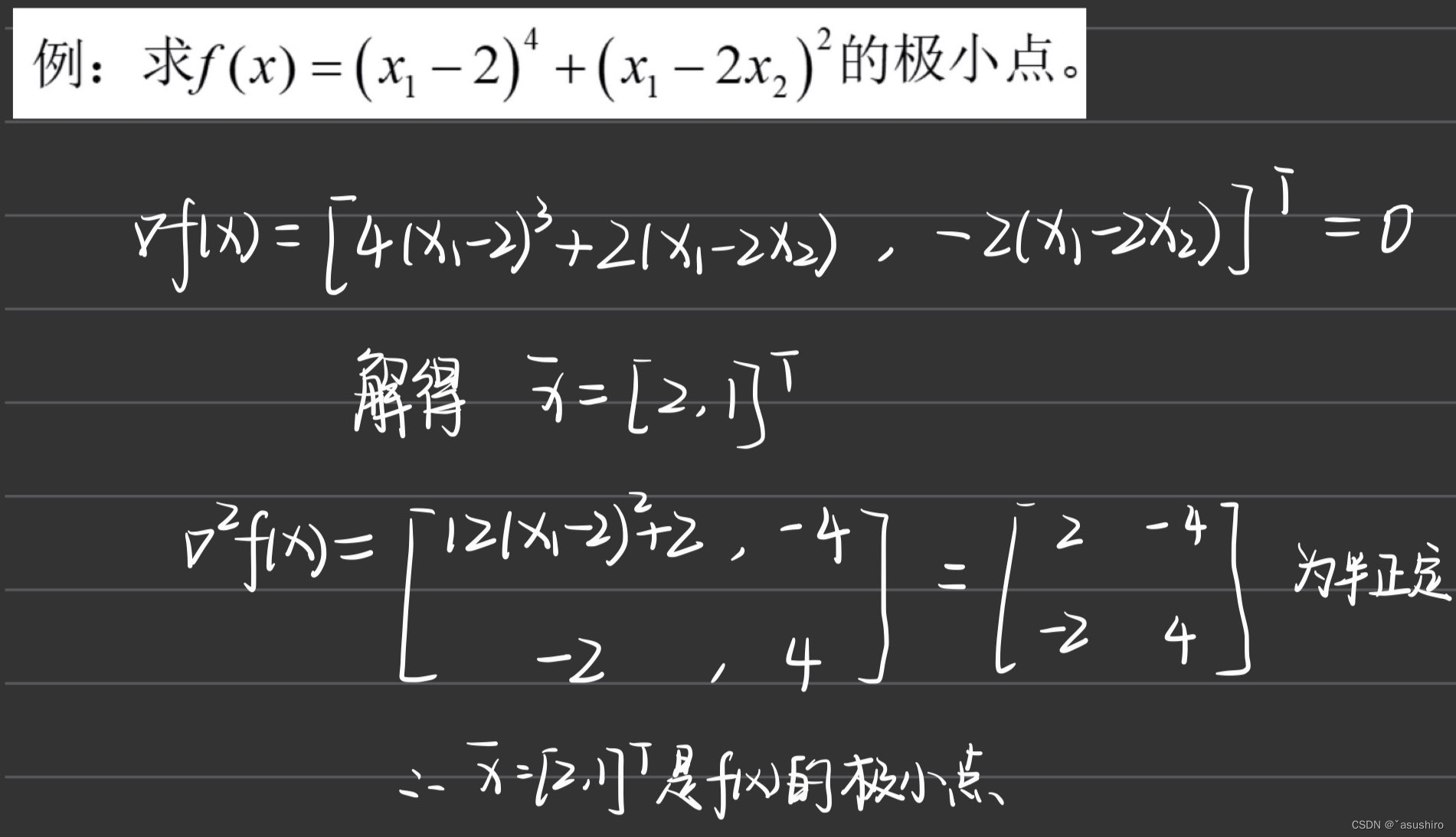
设函数 f ( x ) f(x) f(x) 在点 x ˉ \bar{x} xˉ 处可微, 若 x ˉ \bar{x} xˉ 是局部极小点,则 ▽ f ( x ˉ ) = 0 \bigtriangledown f(\bar{x}) = 0 ▽f(xˉ)=0
类比于若 x ˉ \bar{x} xˉ 是极小值点则 f ′ ( x ˉ ) = 0 f'(\bar{x}) = 0 f′(xˉ)=0 -
二阶必要条件
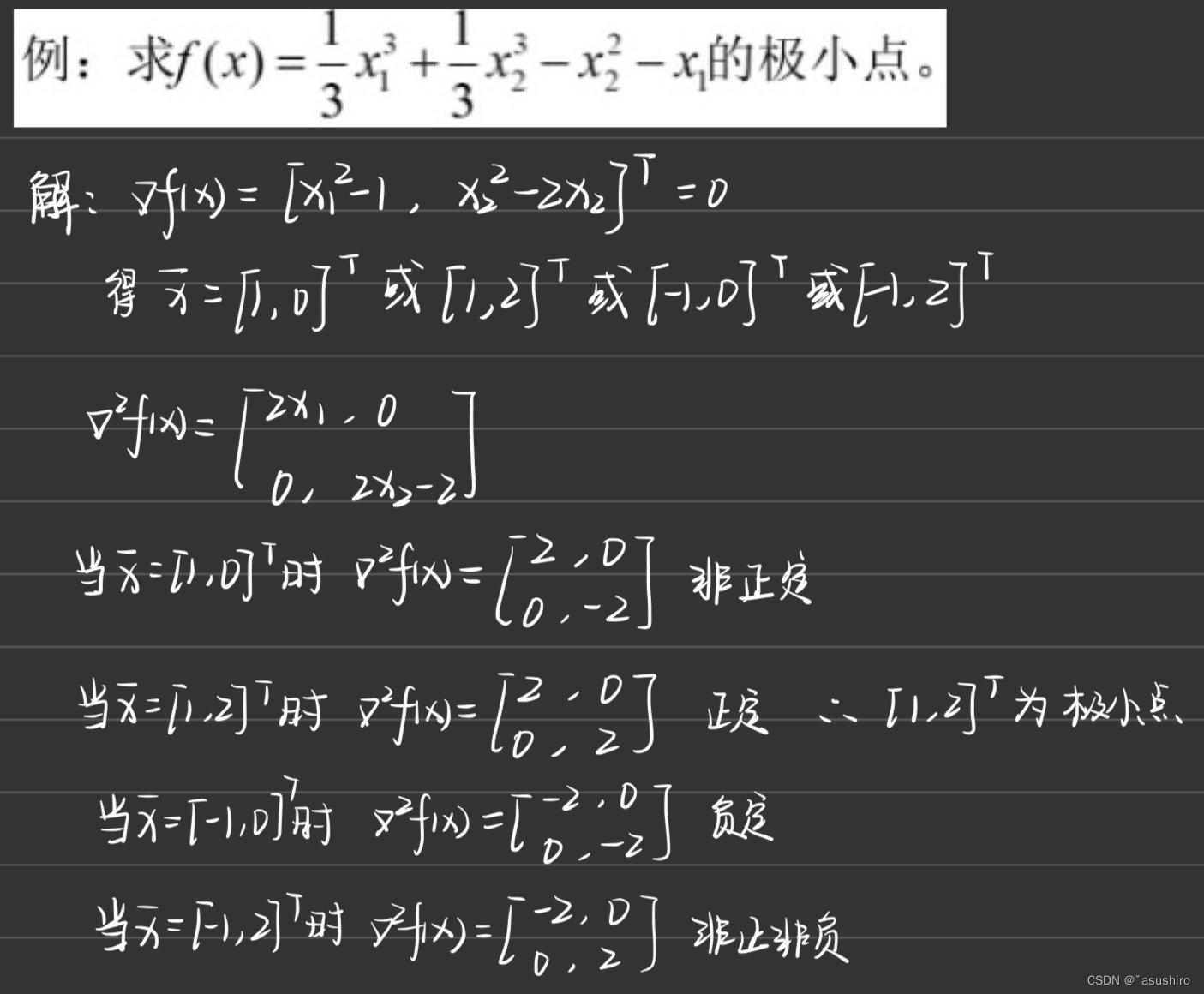
设 f ( x ) f(x) f(x) 在 x ˉ \bar{x} xˉ 处二阶可微,若 x ˉ \bar{x} xˉ 是局部极小点, 则 ▽ f ( x ˉ ) = 0 \bigtriangledown f(\bar{x}) = 0 ▽f(xˉ)=0, 且 H e s s i a n Hessian Hessian 矩阵 ▽ 2 f ( x ˉ ) \bigtriangledown^2f(\bar{x}) ▽2f(xˉ) 是半正定的。
类比于 若 x ˉ \bar{x} xˉ是极小值点则 f ′ ( x ˉ ) = 0 , 且 f ′ ′ ( x ˉ ) ≥ 0 f'(\bar{x}) = 0, 且 f''(\bar{x}) \geq 0 f′(xˉ)=0,且f′′(xˉ)≥0 -
二阶充分条件
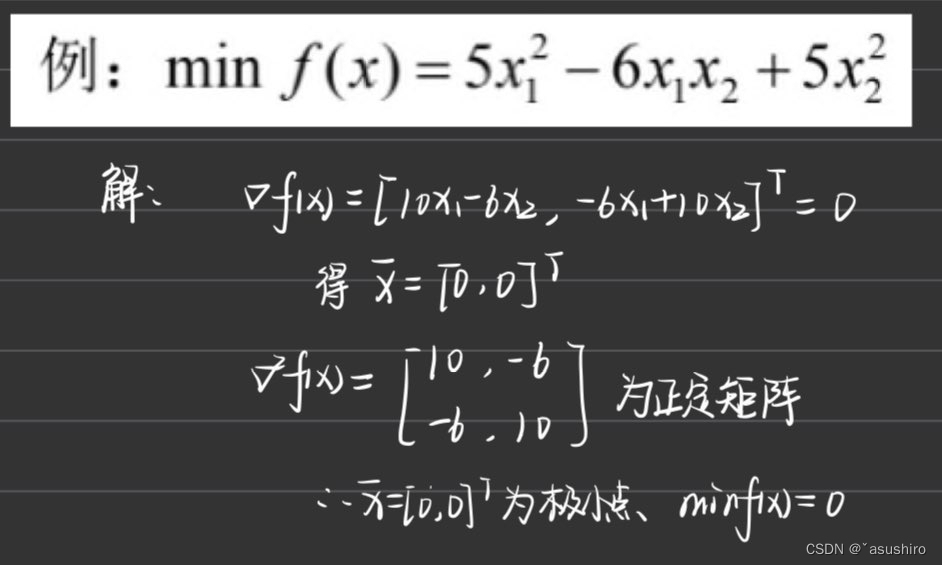
设函数 f ( x ) f(x) f(x) 在点 x ˉ \bar{x} xˉ 处二次可微,若梯度 ▽ f ( x ˉ ) = 0 \bigtriangledown f(\bar{x}) = 0 ▽f(xˉ)=0, 且 H e s s i a n Hessian Hessian 矩阵 ▽ 2 f ( x ˉ ) 正 定 \bigtriangledown^2f(\bar{x})正定 ▽2f(xˉ)正定, 则 x ˉ \bar{x} xˉ是严格局部极小点。
类比于 f ′ ( x ˉ ) = 0 , f ′ ′ ( x ˉ ) > 0 f'(\bar{x}) = 0, f''(\bar{x}) > 0 f′(xˉ)=0,f′′(xˉ)>0则 x ˉ \bar{x} xˉ 是极小值点 -
充要条件
设 f ( x ) f(x) f(x) 是定义在 R n R^n Rn 上的可微凸函数, x ˉ ∈ R n \bar{x} \in R^n xˉ∈Rn, 则 x ˉ \bar{x} xˉ 为整体极小点的充要条件是 ▽ f ( x ˉ ) = 0 \bigtriangledown f(\bar{x}) = 0 ▽f(xˉ)=0
注:如果 f ( x ) f(x) f(x) 是严格凸的,则全局极小点是唯一的。
约束极值问题的最优性条件
基本概念
定义: 对 m i n f ( x ) min f(x) minf(x), 设 x ˉ ∈ R n \bar{x} \in R^n xˉ∈Rn 是任给一点, d ≠ 0 d \not = 0 d=0, 若存在 δ > 0 \delta > 0 δ>0, 使得对任意的 λ ∈ ( 0 , δ ) \lambda \in (0, \delta) λ∈(0,δ), 有 f ( x ˉ + λ d ) < f ( x ˉ ) f (\bar{x} + \lambda d) < f(\bar{x}) f(xˉ+λd)<f(xˉ), 则称 d d d 为 f ( x ) f(x) f(x) 在点 x ˉ \bar{x} xˉ 处的下降方向。
-
引理: 设函数 f ( x ) f(x) f(x) 在点 x ˉ \bar{x} xˉ 可微, 若存在 d ≠ 0 d \not = 0 d=0, 使得 ▽ f ( x ˉ ) T d < 0 \bigtriangledown f(\bar{x})^T d < 0 ▽f(xˉ)Td<0, 则存在 δ > 0 \delta > 0 δ>0, 是使得对 ∀ λ ∈ ( 0 , δ ) \forall \lambda \in (0, \delta) ∀λ∈(0,δ), 有 f ( x ˉ + λ d ) < f ( x ˉ ) f(\bar{x} + \lambda d)<f(\bar{x}) f(xˉ+λd)<f(xˉ)。
即与梯度方向成钝角的方向是下降方向
表示为
F 0 = { d ∣ ▽ f ( x ˉ ) T d < 0 } F_0 = \{ d | \bigtriangledown f(\bar{x})^T d < 0\} F0={d∣▽f(xˉ)Td<0} -
定义: 设集合 S ⊂ R n , x ˉ ∈ c l S . S \subset R^n, \bar{x} \in clS. S⊂Rn,xˉ∈clS., d d d 为非零向量, 若存在数 δ > 0 \delta > 0 δ>0, 使得对任意 λ ∈ ( 0 , δ ) , \lambda \in (0, \delta), λ∈(0,δ), 都有 x ˉ + λ d ∈ S \bar{x} + \lambda d \in S xˉ+λd∈S 则称 d d d 为集合 S S S 在 x ˉ \bar{x} xˉ 的可行方向。
就是移动方向在可行域内
表示为 D = { d ∣ d ≠ 0 , x ˉ ∈ c l S , ∃ δ > 0 , ∀ λ ∈ ( 0 , δ ) , 有 x ˉ + λ d ∈ S } D = \{ d | d \not = 0, \bar{x} \in clS, \exists \delta > 0, \forall \lambda \in (0, \delta), 有 \bar{x} + \lambda d \in S \} D={d∣d=0,xˉ∈clS,∃δ>0,∀λ∈(0,δ),有xˉ+λd∈S}
x ˉ 处 的 可 行 方 向 锥 \bar{x} 处的可行方向锥 xˉ处的可行方向锥 -
定义: 若问题的可行点 x ˉ \bar{x} xˉ 是某个不等式约束 g i ( x ) ≥ 0 g_i(x) \geq 0 gi(x)≥0 变成等式, 则该不等式约束称为关于可行点 x ˉ \bar{x} xˉ 的起作用约束; 否则称为不起作用约束。
表示为
I = { i ∣ g i ( x ˉ = 0 , x ˉ ∈ S ) } I = \{ i| g_i(\bar{x} = 0, \bar{x} \in S) \} I={i∣gi(xˉ=0,xˉ∈S)} -
定义:在起作用约束作对应切线,获得对应梯度,与这两个梯度同时呈锐角的方向为积极约束的可行方向。
表示为 G 0 = { d ∣ ▽ g i ( x ˉ ) T d > 0 , i ∈ I ( x ) } G_0 = \{d | \bigtriangledown g_i(\bar{x})^T d > 0, i \in I(x) \} G0={d∣▽gi(xˉ)Td>0,i∈I(x)}
即由约束条件求出的可行方向
有 G 0 ⊂ D G_0 \subset D G0⊂D
问题标准形式:
m i n f ( x ) \ \ \ \ \ \ \ \ min f(x) minf(x)
s . t . { g i ( x ) ≥ 0 , 不 等 式 约 束 h j ( x ) = 0 , 等 式 约 束 x ∈ R n s.t.\left \{\begin{matrix} g_i (x) \geq 0,不等式约束 \\ \\h_j(x) = 0,等式约束 \\ \\ x \in R^n \end {matrix} \right. s.t.⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧gi(x)≥0,不等式约束hj(x)=0,等式约束x∈Rn
几何最优性条件:设 S S S 是 R n R^n Rn 的非空集合, x ˉ ∈ S , f ( x ) \bar{x} \in S, f(x) xˉ∈S,f(x)在 x ˉ \bar{x} xˉ 处可微, 若 x ˉ \bar{x} xˉ 是局部最优解, 则 F 0 ∩ D = ∅ F_0 \cap D = \emptyset F0∩D=∅
即所有的可行方向都是上升方向
只有不等式约束时
由于 G 0 ⊂ D G_0 \subset D G0⊂D 所以也有 F 0 ∩ G 0 = ∅ F_0 \cap G_0 = \emptyset F0∩G0=∅,可行域之内不能有空洞
- (F-J条件) 设 x ˉ ∈ S , I = { i ∣ g i ( x ˉ ) = 0 } , f ( x ) , g i ( x ) ( i ∈ I ) \bar{x} \in S, I = \{ i | g_i(\bar{x}) = 0\}, f(x), g_i(x) (i \in I) xˉ∈S,I={i∣gi(xˉ)=0},f(x),gi(x)(i∈I) 在 x ˉ \bar{x} xˉ 处可微, g i ( x ) ( i ∉ I ) g_i(x) (i \notin I) gi(x)(i∈/I) 在 x ˉ \bar{x} xˉ 处连续, 若 x ˉ \bar{x} xˉ 是问题的最优解,则存在不全为零的数 w 0 , w i ( i ∈ I ) w_0, w_i (i \in I) w0,wi(i∈I) 使得
w 0 ▽ f ( x ˉ ) − ∑ i ∈ I w i ▽ g i ( x ˉ ) = 0 w_0 \bigtriangledown f(\bar{x}) - \sum\limits_{i \in I} w_i \bigtriangledown g_i(\bar{x}) = 0 w0▽f(xˉ)−i∈I∑wi▽gi(xˉ)=0
称 x ˉ \bar{x} xˉ 为 F − J F-J F−J 点
为必要条件,极小值点一定是 F-J点, 但 F-J点不一定为极小值点
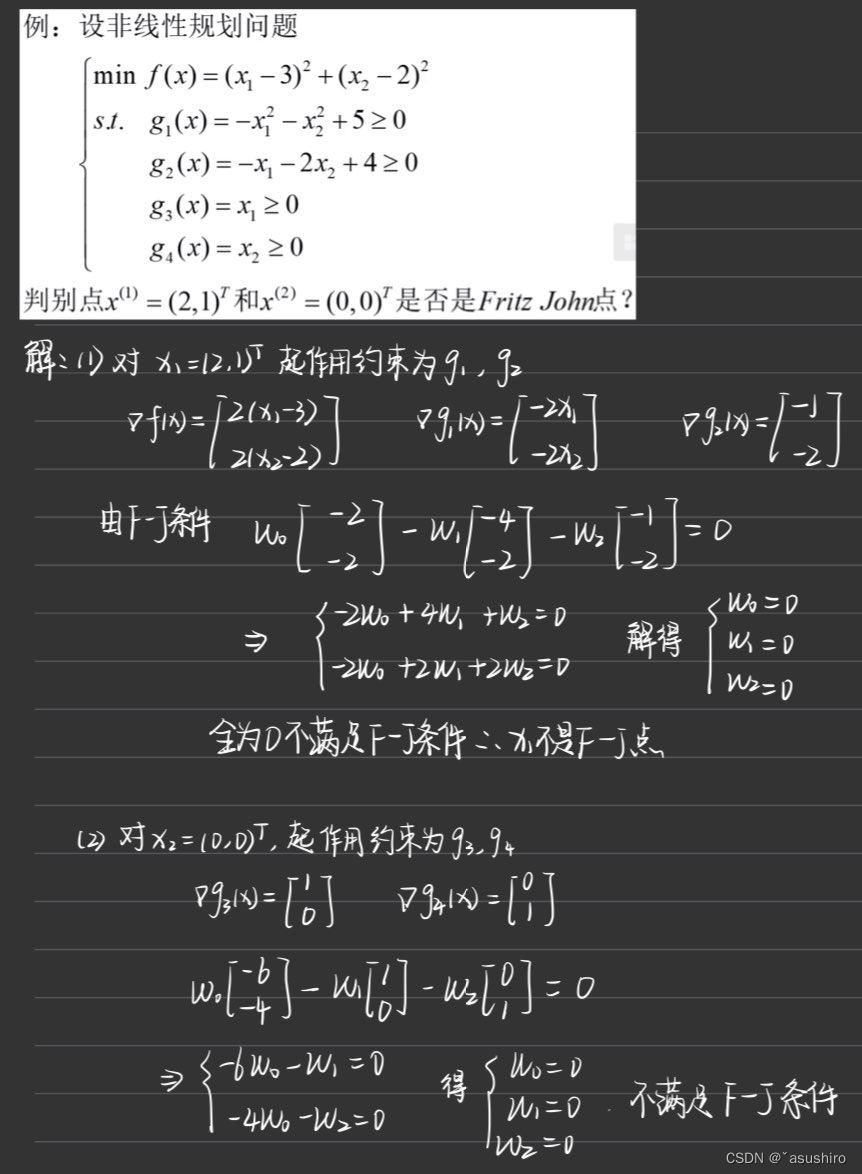

当 w 0 = 0 w_0 = 0 w0=0 是另外另个约束条件的梯度必须能相互抵消,这种情况才有最优解,因此更多的是关注 w 0 ≠ 0 w_0 \not = 0 w0=0的情况
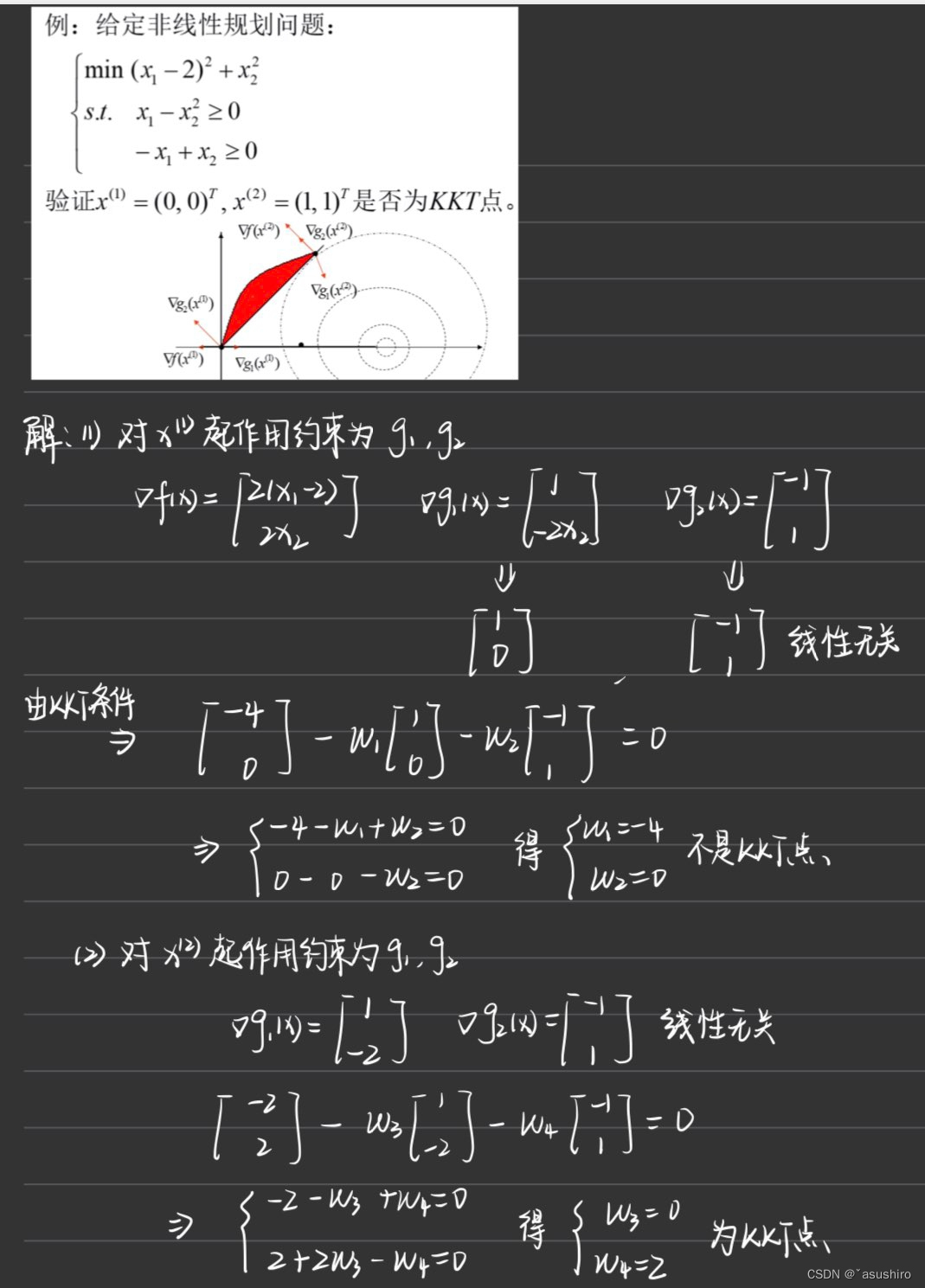
- (KKT条件) 设 x ˉ ∈ S \bar{x} \in S xˉ∈S , f , g i ( i ∈ I ) 在 x ˉ 处 可 微 , g i ( i ∉ I ) 在 x ˉ 连 续 f, g_i(i \in I)在\bar{x} 处可微, g_i(i \notin I) 在\bar{x}连续 f,gi(i∈I)在xˉ处可微,gi(i∈/I)在xˉ连续(保证无空洞), { ▽ g i ( x ˉ ) ∣ i ∈ I } 线 性 无 关 \{ \bigtriangledown g_i(\bar{x}) | i \in I\} 线性无关 {▽gi(xˉ)∣i∈I}线性无关, 若 x ˉ \bar{x} xˉ 是局部最优解, 则存在非负数 w i , i ∈ I , w_i, i \in I, wi,i∈I, 使得
▽ f ( x ˉ ) − ∑ i ∈ I w i ▽ g i ( x ˉ ) = 0 \bigtriangledown f(\bar{x}) - \sum\limits_{i \in I} w_i \bigtriangledown g_i(\bar{x}) = 0 ▽f(xˉ)−i∈I∑wi▽gi(xˉ)=0
凸规划的判别方法:
- 可行域是凸集, 目标函数是凸函数
- 可行域是 ≥ \geq ≥的凹函数, 目标函数是凸函数
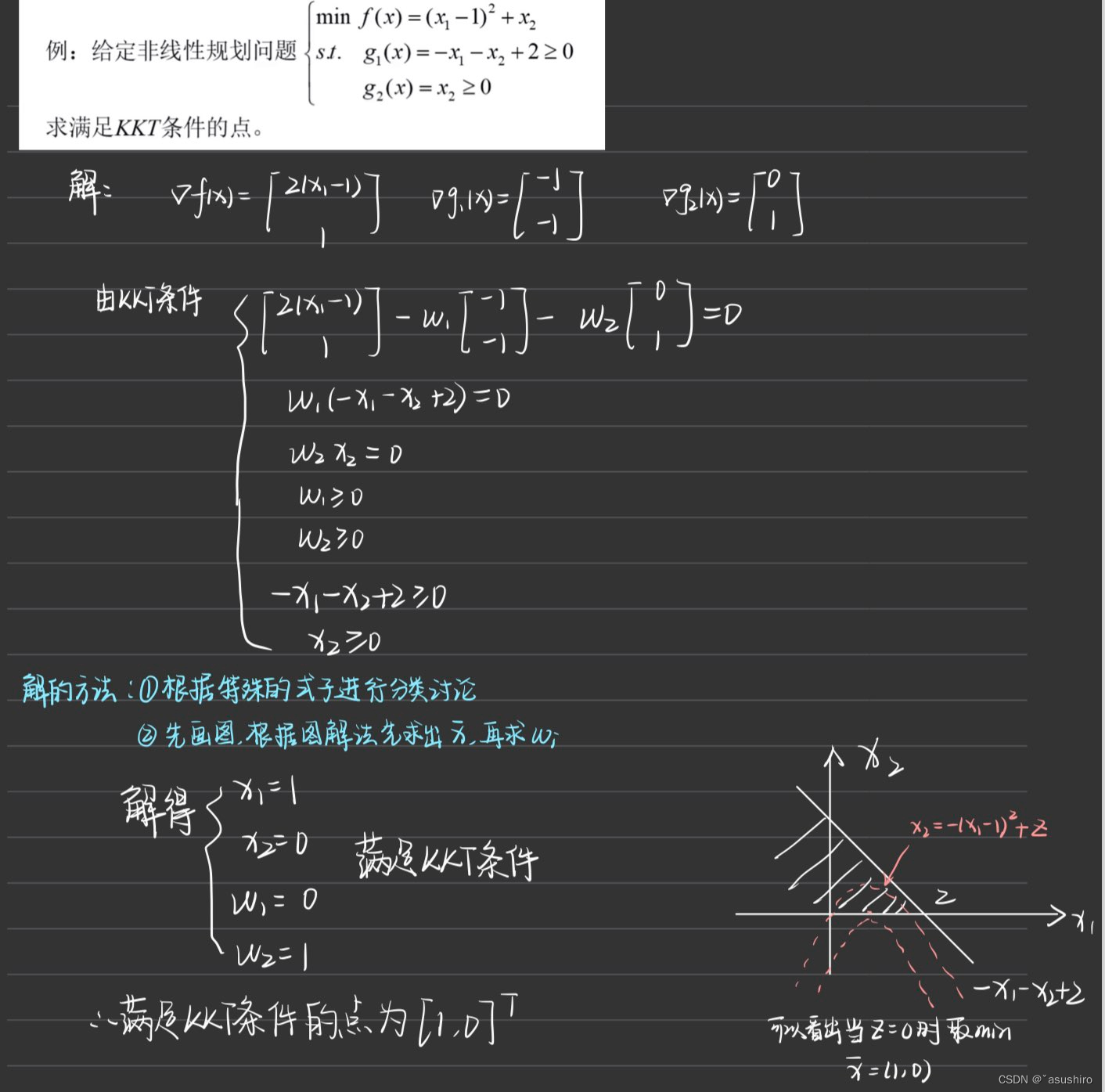
求KKT点
- KKT条件的另一种表述
设 x ˉ ∈ S \bar{x} \in S xˉ∈S , f , g i ( i ∈ I ) 在 x ˉ f, g_i(i \in I)在\bar{x} f,gi(i∈I)在xˉ 处可微, { ▽ g i ( x ˉ ) ∣ i ∈ I } 线 性 无 关 \{ \bigtriangledown g_i(\bar{x}) | i \in I\}线性无关 {▽gi(xˉ)∣i∈I}线性无关, 若 x ˉ \bar{x} xˉ 是局部最优解, 则存在非负数 w i , i = 1 , 2... m w_i, i =1,2...m wi,i=1,2...m 使得
{ ▽ f ( x ˉ ) − ∑ i = 1 m w i ▽ g i ( x ˉ ) = 0 ( 没 要 求 对 应 的 g i ( x ) 为 约 束 条 件 ) w i g i ( x ˉ ) = 0 , i = 1 , 2... m ( 互 补 松 弛 条 件 ) w i ≥ 0 i = 1 , 2... m \left \{\begin{matrix} \bigtriangledown f(\bar{x}) - \sum\limits_{i = 1}^{m} w_i \bigtriangledown g_i(\bar{x}) = 0(没要求对应的g_i(x)为约束条件) \\ \\w_ig_i(\bar{x}) = 0, i = 1, 2...m (互补松弛条件) \\ \\ w_i \geq 0 i = 1,2...m \end {matrix} \right. ⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧▽f(xˉ)−i=1∑mwi▽gi(xˉ)=0(没要求对应的gi(x)为约束条件)wigi(xˉ)=0,i=1,2...m(互补松弛条件)wi≥0i=1,2...m
通过这个表述方式,加上原来的约束然后将所有的方程列出来求解
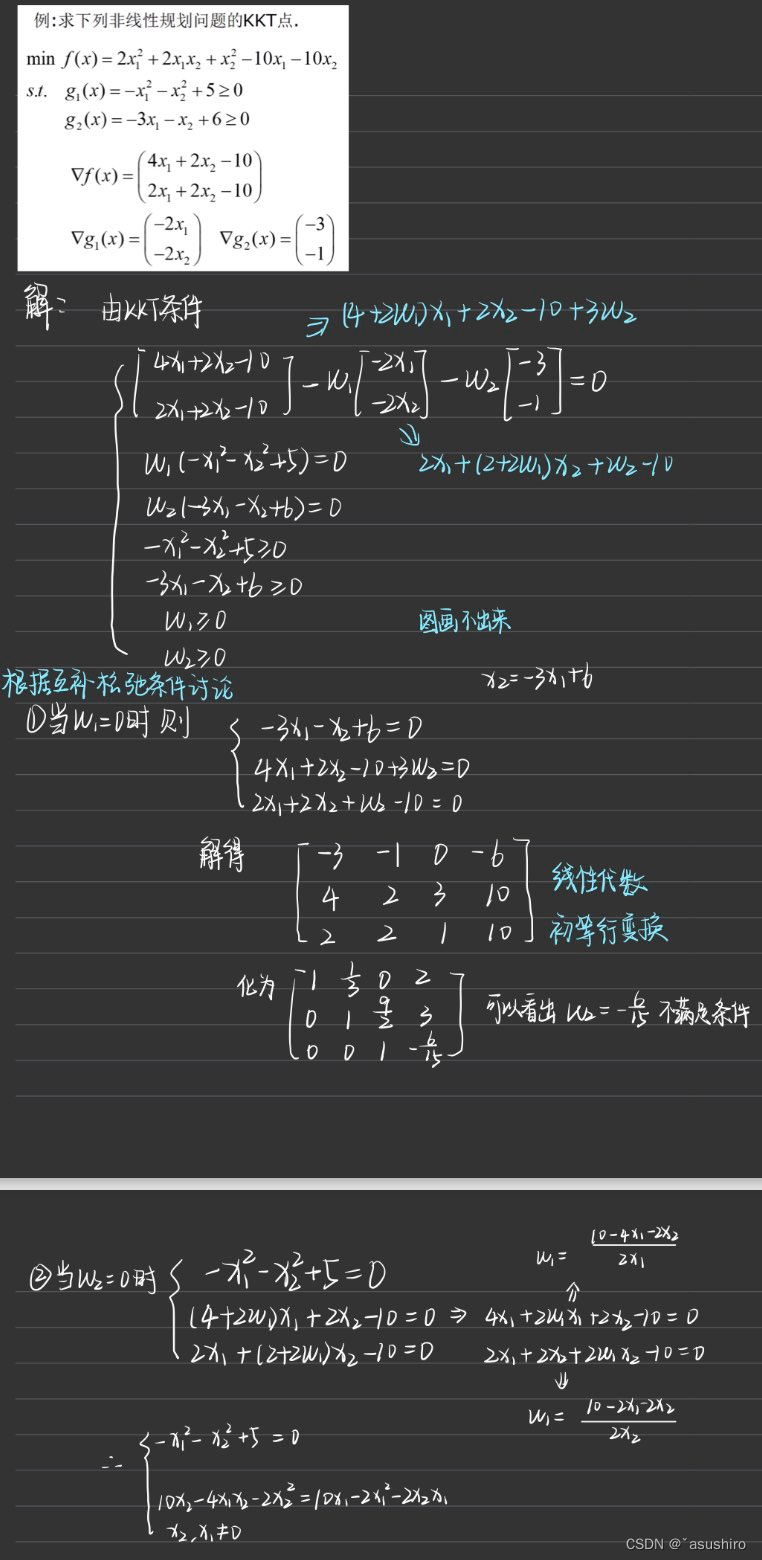
有人会算的话请留言,感谢
下一篇
最优化理论复习–最优性条件(二)
相关文章:
最优化理论分析复习--最优性条件(一)
文章目录 上一篇无约束问题的极值条件约束极值问题的最优性条件基本概念只有不等式约束时 下一篇 上一篇 最优化理论复习–对偶单纯形方法及灵敏度分析 无约束问题的极值条件 由于是拓展到向量空间 R n R^n Rn, 所以可由高数中的极值条件进行类比 一阶必要条件 设函数 f (…...

基于WIFI指纹的室内定位算法matlab仿真
目录 1.算法运行效果图预览 2.算法运行软件版本 3.部分核心程序 4.算法理论概述 4.1WIFI指纹定位原理 4.2 指纹数据库建立 4.3定位 5.算法完整程序工程 1.算法运行效果图预览 2.算法运行软件版本 matlab2022a 3.部分核心程序 .....................................…...
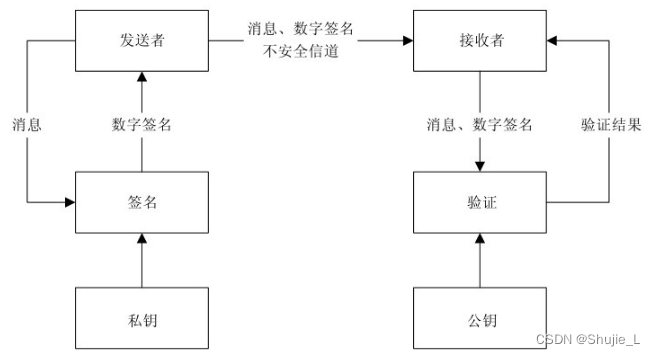
密码学:一文读懂非对称密码体制
文章目录 前言非对称密码体制的保密通信模型私钥加密-公钥解密的保密通信模型公钥加密-私钥解密的保密通信模型 复合式的非对称密码系统散列函数数字签名数字签名满足的三个基本要求先加密还是先签名?数字签名成为公钥基础设施以及许多网络安全机制的基础什么是单向…...
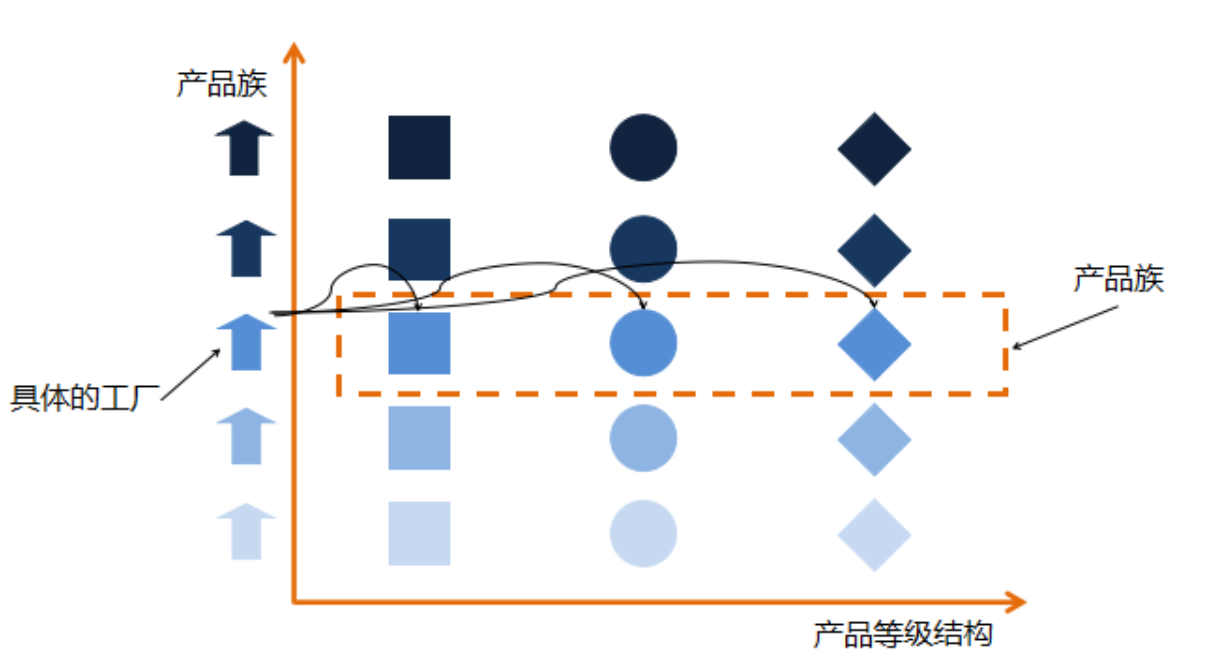
2_工厂设计_工厂方法和抽象工厂
工厂设计模式-工厂方法 1.概念 工厂方法模式(Fatory Method Pattern ) 是指定义一个创建对象的接口,但让实现这个接口的类来决定实例化哪个类,工厂方法让类的实例化推迟到子类中进行。 在工厂方法模式中用户只需要关心所需产品对应的工厂,…...

k8s之pod进阶
1.k8s的pod重启策略 Always :不论正常退出还是非正常退出都重启deployment的yaml文件只能是always pod的yaml三种模式都可以。 OnFailure:只有状态码非0才会重启,正常退出不重启 Never:正常退出和非正常退出都不重启 容器的退…...
)
RTTI(运行时类型识别)
RTTI(运行时类型识别) 实验介绍 RTTI 全称 Run Time Type Identification,中文称为 “运行时类型识别”,在程序中使用 typeid 和 dynamic_cast 实现。RTTI 技术允许程序在运行时识别对象的类型。 知识点 typeiddynamic_castRTTI 技术typeid typeid 是 C++ 关键字,用于…...

19.Linux Shell任务控制
文章目录 Linux Shell任务控制1)信号通过键盘生成信号trap 命令捕获信号 2)在后台运行脚本命令后加 & 符使用nohub命令 3)作业控制4)调度优先级nice命令renice 命令 5)定时运行作业at定期执行命令reference 欢迎访问个人网络日志🌹🌹知行空间&#x…...

域名流量被劫持怎么办?如何避免域名流量劫持?
随着互联网不断发展,流量成为线上世界的巨大财富。然而一种叫做域名流量劫持的网络攻击,将会在不经授权的情况下控制或重定向一个域名的DNS记录,导致用户在访问一个网站时,被引导到另一个不相关的网站,从而劫持走原网站…...
java案例知识点
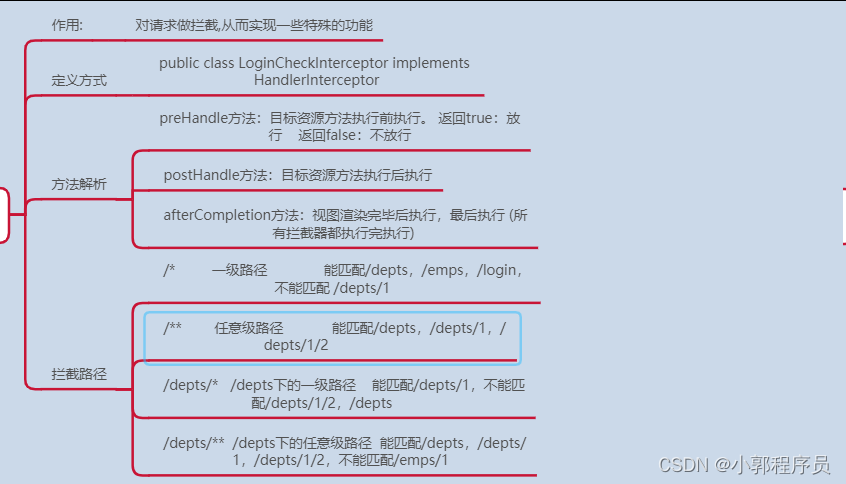
一.会话技术 概念 技术 二.跨域 三.过滤器 四.拦截器...

Arrays 的使用
Arrays 概述 提供了数组操作的相关方法,连接数组和集合 asList 返回指定数组的列表列表和数组的引用位置相同 Integer[] arrs new Integer[] {1,2,3,4,5,6,7,8,9};List<Integer> list Arrays.asList(arrs);System.out.println(list);arrs[5] 100;Syste…...
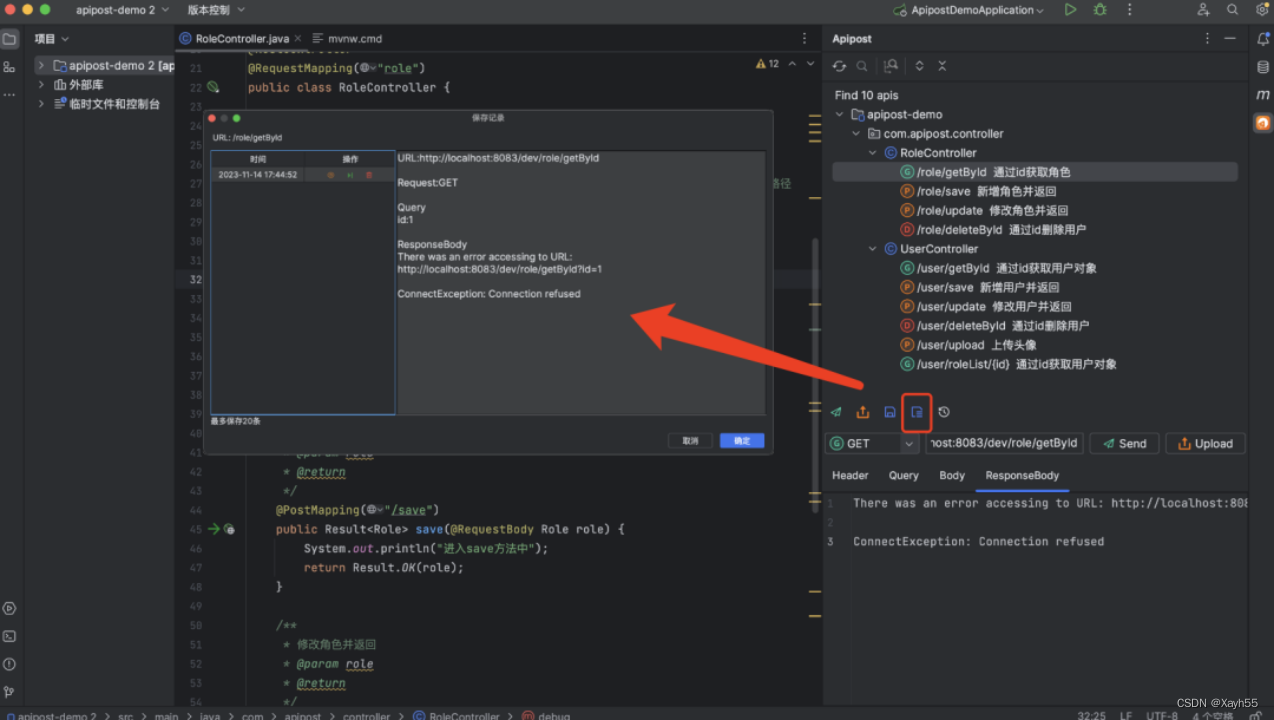
IDEA中怎么用Postman?这款插件你试试
Postman是大家最常用的API调试工具,那么有没有一种方法可以不用手动写入接口到Postman,即可进行接口调试操作?今天给大家推荐一款IDEA插件:Apipost Helper,写完代码就可以调试接口并一键生成接口文档!而且还…...
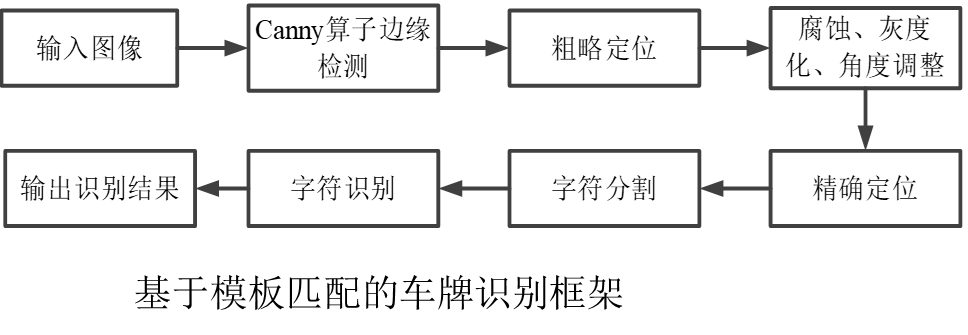
基于机器视觉的车牌检测-边缘检测因子的选择
车牌检测概述 车牌识别在检测报警、汽车出入登记、交通违法违章以及移动电子警察方面应用广泛。车牌识别过程为:首先通过摄像头获取包含车牌的彩色图像;然后进行车牌边缘检测,先粗略定位到车牌位置,再精细定位;最后根…...
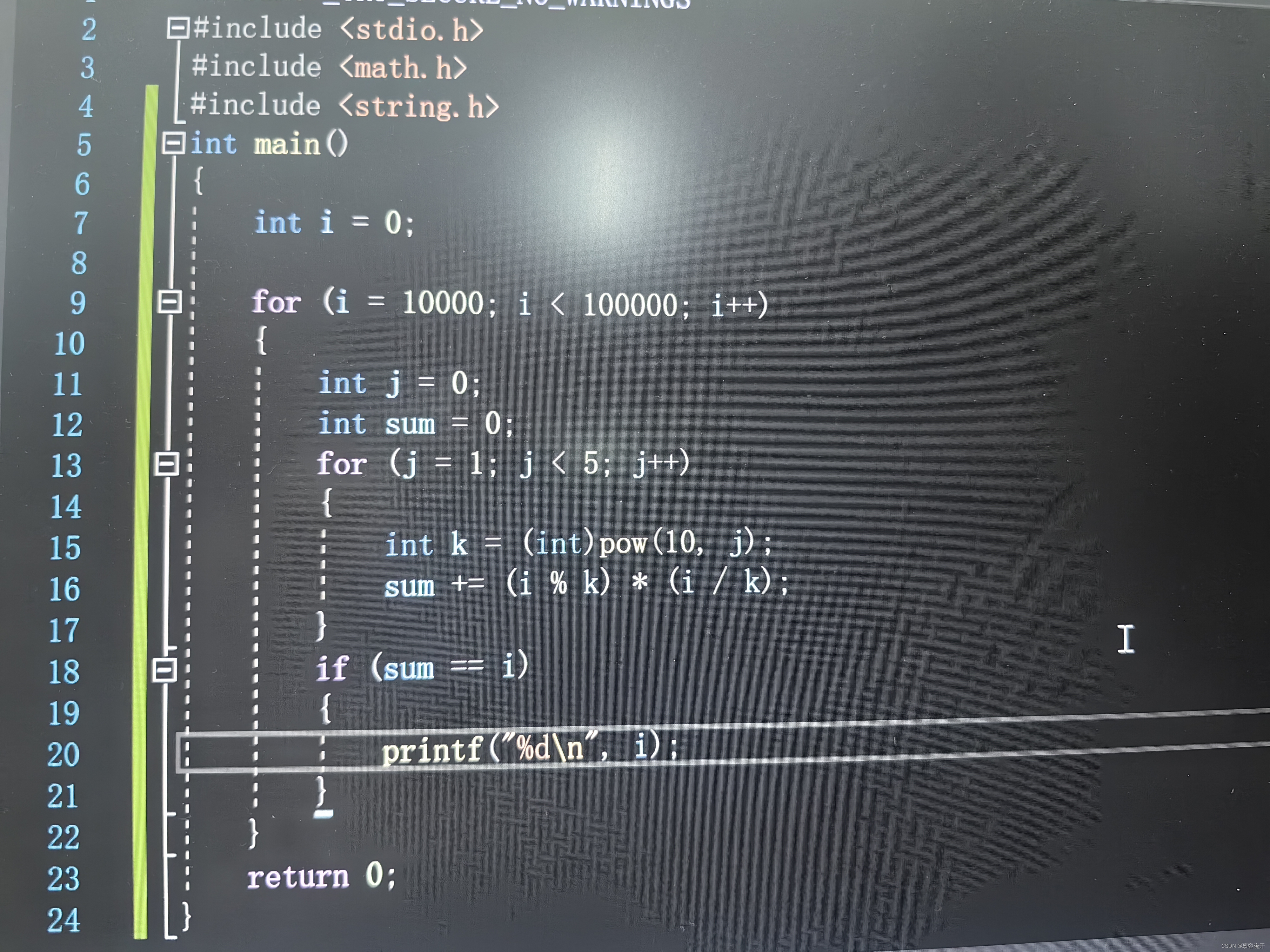
学习c语言,变种水仙花
利用函数次方pow...
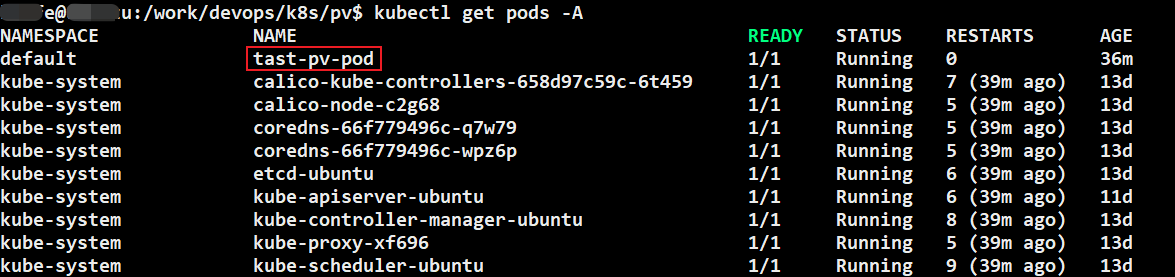
K8S--持久卷(PersistentVolume)的用法
原文网址:K8S--持久卷(PersistentVolume)的用法-CSDN博客 简介 本文介绍K8S的持久卷(PersistentVolume)的用法。 目标:用持久卷的方式将主机的磁盘与容器磁盘映射,安装nginx并运行。 --------------------------------------------------…...
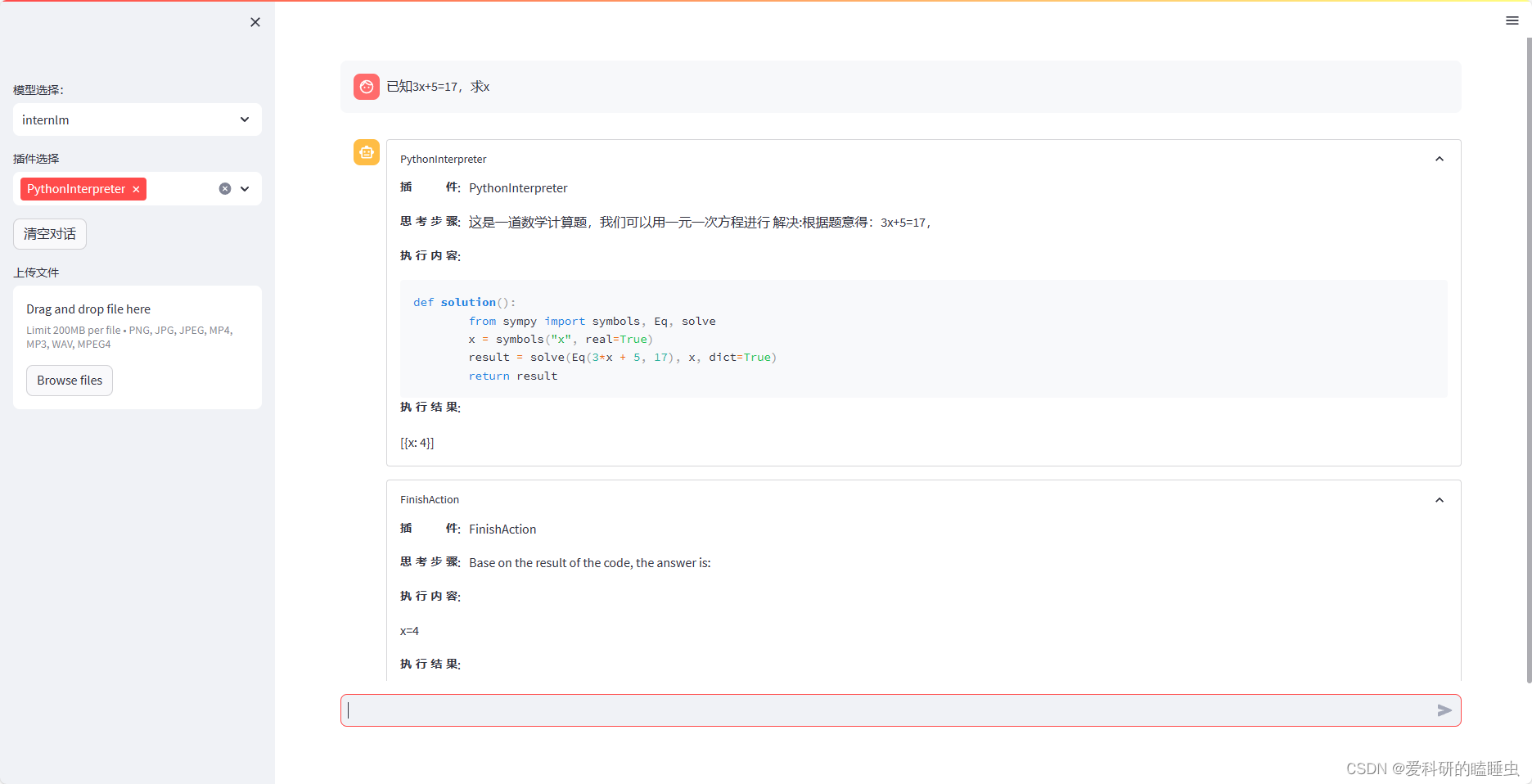
书生·浦语大模型趣味 Demo笔记及作业
文章目录 笔记作业基础作业:进阶作业: 笔记 书生浦语大模型InternLM-Chat-7B 智能对话 Demo:https://blog.csdn.net/m0_49289284/article/details/135412067书生浦语大模型Lagent 智能体工具调用 Demo:https://blog.csdn.net/m0_…...

2024最新前端源码分享(附效果图及在线演示)
分享10款非常有趣的前端特效源码 其中包含css动画特效、js原生特效、svg特效以及小游戏等 下面我会给出特效样式图或演示效果图 但你也可以点击在线预览查看源码的最终展示效果及下载源码资源 粒子文字动画特效 基于canvas实现的粒子文字动画特效 会来回切换设定的文字特效 图…...

Microsoft 365 for Mac激活版(原Office 365)
Microsoft 365 for Mac原office 365,包含Word、Excel、PowerPoint 和 Outlook应用程序,协作办公的最佳首选。 软件下载:Microsoft 365 for Mac激活版下载 Microsoft 365 的一些主要功能包括: office 应用程序:Microsof…...
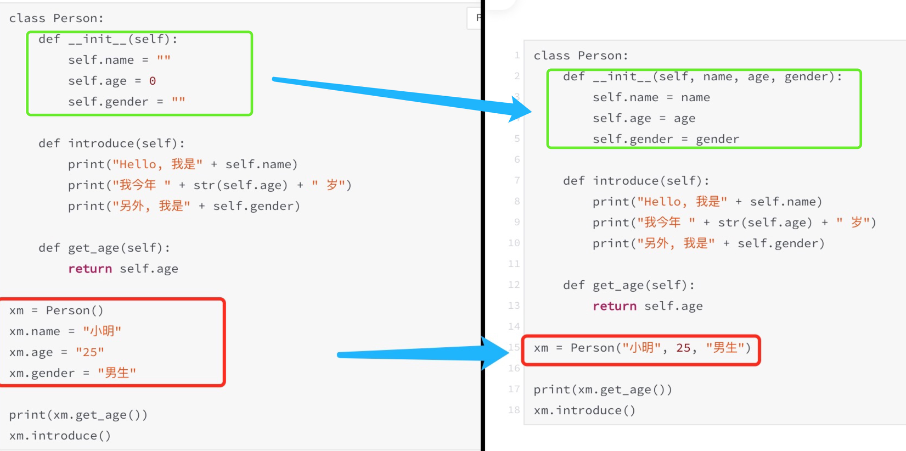
快乐学Python,Python基础之组织代码「类与对象」
在上一篇文章中,我们了解了函数。这一篇文章我们来了解一下Python中另外一个重要的概念:类与对象。 1、类与对象 (1)类与对象有什么关系? 你可能会奇怪,为什么要叫类与对象呢?是两个不同的东…...

H5的3D游戏开源框架
在H5的3D游戏框架中,Three.js、Babylon.js和Turbulenz是比较受欢迎的选择。 Three.js是一个广泛应用并且功能强大的JavaScript 3D库,可以创建简单的3D动画到创建交互的3D游戏。 Babylon.js是David Catuhe对3D游戏引擎热爱的结果,是最好的Ja…...

浅谈一些生命周期
vue2生命周期 beforeCreate :实例创建之初 created:组件已经创建完成 beforeMount:组件挂载之前 mounted:组件挂载之后 beforeUpdate:数据发生变化 更新之前 undated:数据发生之后 beforeDestroy :实…...

3个高效方法解决抖音素材管理难题:从零散文件到有序素材库
3个高效方法解决抖音素材管理难题:从零散文件到有序素材库 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback s…...
)
从A/B测试到临床实验:避开P值陷阱的5个实战要点(含单尾/双尾选择指南)
从A/B测试到临床实验:避开P值陷阱的5个实战要点(含单尾/双尾选择指南) 在数据驱动的决策时代,P值已成为产品迭代和医学研究中的"通行货币"。当A/B测试报告显示"P<0.05"时,团队往往迫不及待地全…...

【UE5】数字人实战:从动捕到物理发型的全链路解析
1. 数字人制作全流程概览 数字人制作是一个从建模到最终呈现的完整技术链条。在UE5引擎中,我们可以将动捕数据、表情捕捉和物理发型等模块有机整合,打造出逼真可交互的数字角色。整个流程可以划分为三个核心环节:表情捕捉(LiveLin…...

用STM32F103和继电器DIY智能家居:低成本改造台灯/风扇的保姆级教程
用STM32F103和继电器DIY智能家居:低成本改造台灯/风扇的保姆级教程 智能家居的概念早已不再遥不可及,借助STM32F103这样的低成本微控制器和简单的继电器模块,任何人都能将普通家电升级为智能设备。本文将手把手教你如何将一个普通台灯或风扇改…...

基于朴素贝叶斯算法的情感文本分析与分类:快速上手情感分析
基于朴素贝叶斯算法的情感文本分析与分类:快速上手情感分析 【下载地址】基于朴素贝叶斯机器学习算法的情感文本分析与分类 本资源文件提供了一个基于朴素贝叶斯机器学习算法的情感文本分析与分类的实现。该实现包含了数据集和预训练的中文分词模型,帮助…...

深入理解强化学习基础:价值函数、策略梯度与PPO算法核心原理
深入理解强化学习基础:价值函数、策略梯度与PPO算法核心原理 【免费下载链接】LLM-RL-Visualized 🌟100 原创 LLM / RL 原理图📚,《大模型算法》作者巨献!💥(100 LLM/RL Algorithm Maps &#x…...

技术博主都在悄悄用的Perplexity高级搜索语法,11个未公开符号组合全曝光
更多请点击: https://kaifayun.com 第一章:Perplexity高级搜索语法的底层逻辑与设计哲学 Perplexity 的高级搜索语法并非简单的关键词匹配扩展,而是基于语义意图建模与查询图谱重构的设计实践。其核心在于将用户自然语言查询实时编译为可执行…...

【AI编程生产力跃迁】:用Perplexity秒级获取可运行代码示例的6大权威提示工程模板
更多请点击: https://codechina.net 第一章:Perplexity代码示例查询的核心机制与能力边界 Perplexity 在处理代码示例查询时,并非依赖静态模板匹配,而是通过多阶段语义理解与上下文感知检索协同实现:首先对用户自然语…...

Adobe-GenP 3.0:5分钟解锁Adobe全家桶的专业方案
Adobe-GenP 3.0:5分钟解锁Adobe全家桶的专业方案 【免费下载链接】Adobe-GenP Adobe CC 2019/2020/2021/2022/2023 GenP Universal Patch 3.0 项目地址: https://gitcode.com/gh_mirrors/ad/Adobe-GenP 还在为高昂的Adobe订阅费用发愁吗?Adobe-Ge…...

终极指南:如何使用AntiDupl.NET快速清理重复图片,释放硬盘空间
终极指南:如何使用AntiDupl.NET快速清理重复图片,释放硬盘空间 【免费下载链接】AntiDupl A program to search similar and defect pictures on the disk 项目地址: https://gitcode.com/gh_mirrors/an/AntiDupl 你是否曾因电脑中堆积如山的重复…...