简单的MOV转MP4方法


相关文章:
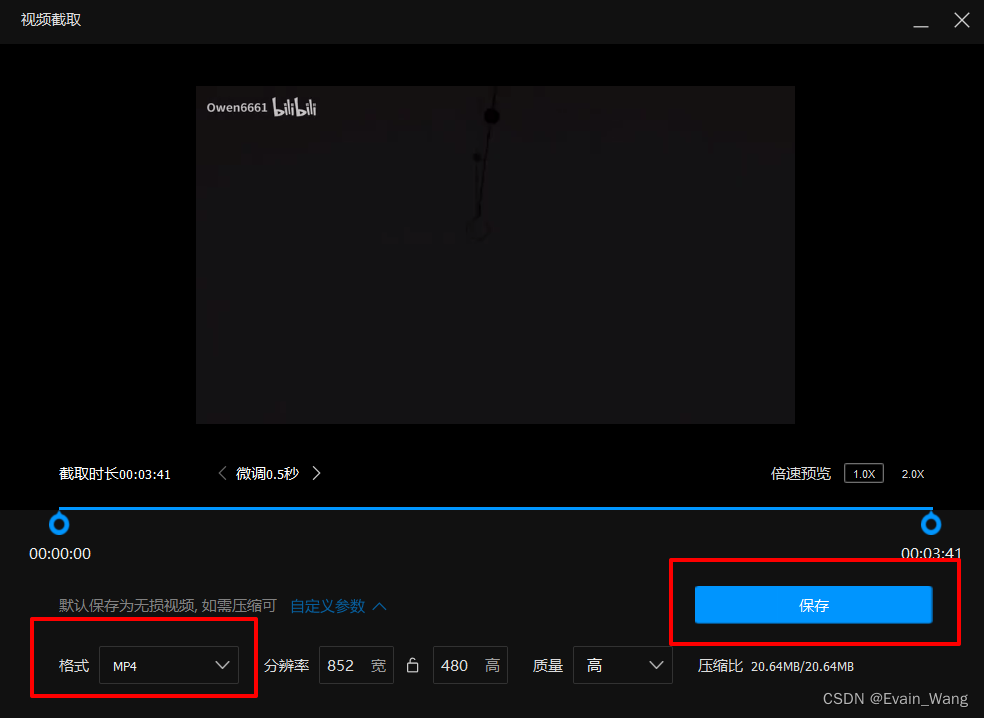
简单的MOV转MP4方法
1.下载腾讯的QQ影音播放器, 此播放器为绿色视频播放器, 除了播放下载好的视频外没有臃肿无用功能 官网 QQ影音 百度网盘链接:https://pan.baidu.com/s/1G0kSC-844FtRfqGnIoMALA 提取码:dh4w 2.用QQ影音打开MOV文件 3.右下角打开影音工具箱 , 选择截取…...
YOLOv8改进 | Neck篇 | 利用ASF-YOLO改进特征融合层(适用于分割和目标检测)
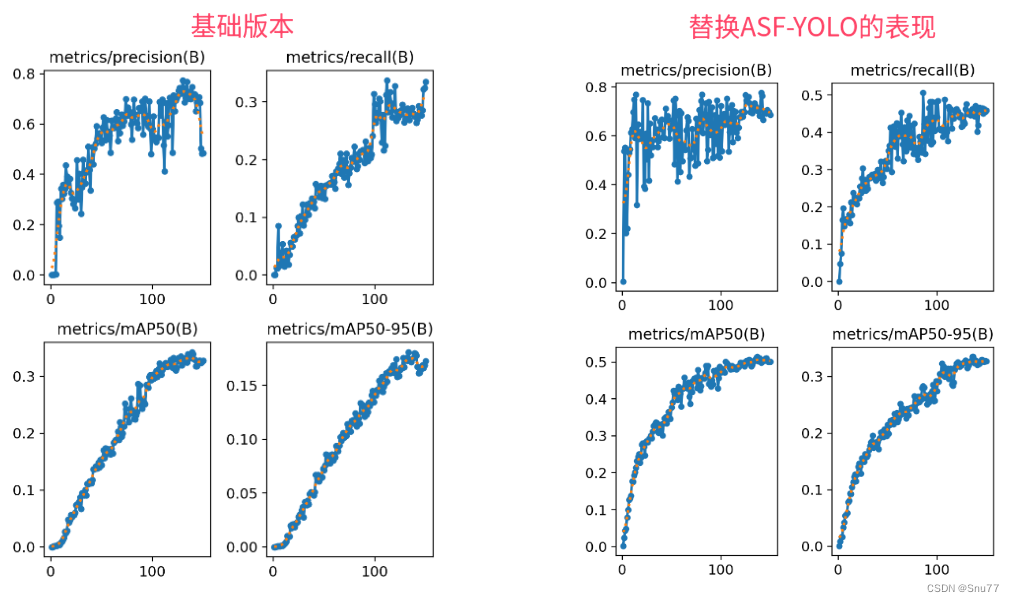
一、本文介绍 本文给大家带来的改进机制是ASF-YOLO(发布于2023.12月份的最新机制),其是特别设计用于细胞实例分割。这个模型通过结合空间和尺度特征,提高了在处理细胞图像时的准确性和速度。在实验中,ASF-YOLO在2018年数据科学竞赛数据集上取得了卓越的分割准确性和速度,…...

基于模块自定义扩展字段的后端逻辑实现(一)
目录 一:背景介绍 二:实现过程 三:字段标准化 四:数据存储 五:数据扩展 六:表的设计 一:背景介绍 最近要做一个系统,里面涉及一个模块是使用拖拉拽的形式配置模块使用的字段表…...
力扣:18.四数之和
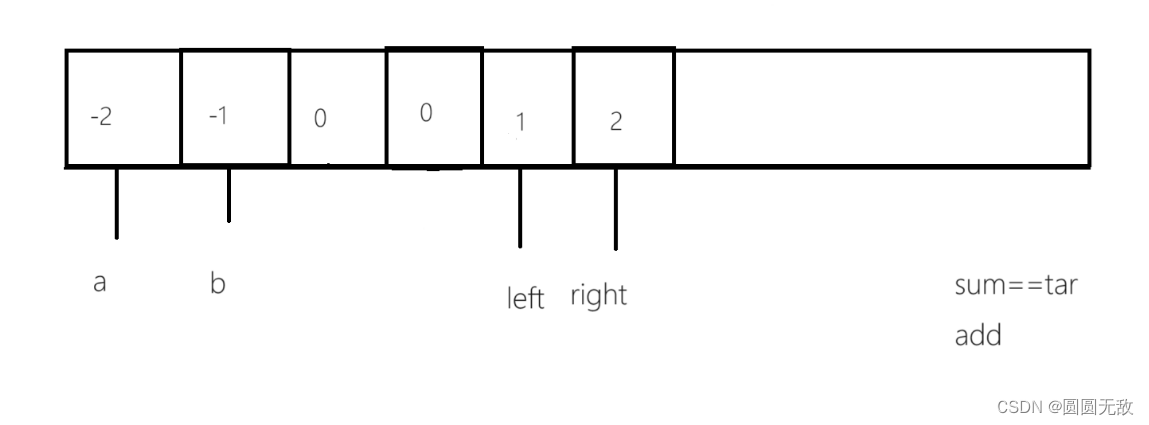
一、做题链接:18. 四数之和 - 力扣(LeetCode) 二、题目分析 1.做这一道题之前本博主建议先看上一篇《三数之和》 2.题目分析 给你一个由 n 个整数组成的数组 nums ,和一个目标值 target 。请你找出并返回满足下述全部条件且不重…...

.netcore 6 ioc注入的三种方式
1、定义接口 public interface MyInterceptorInterface 2、实现接口 public class MyInterceptorImpl : MyInterceptorInterface 在构造中增加以下代码,便于观察 static ConcurrentDictionary<string, string> keyValues new ConcurrentDictionary<s…...
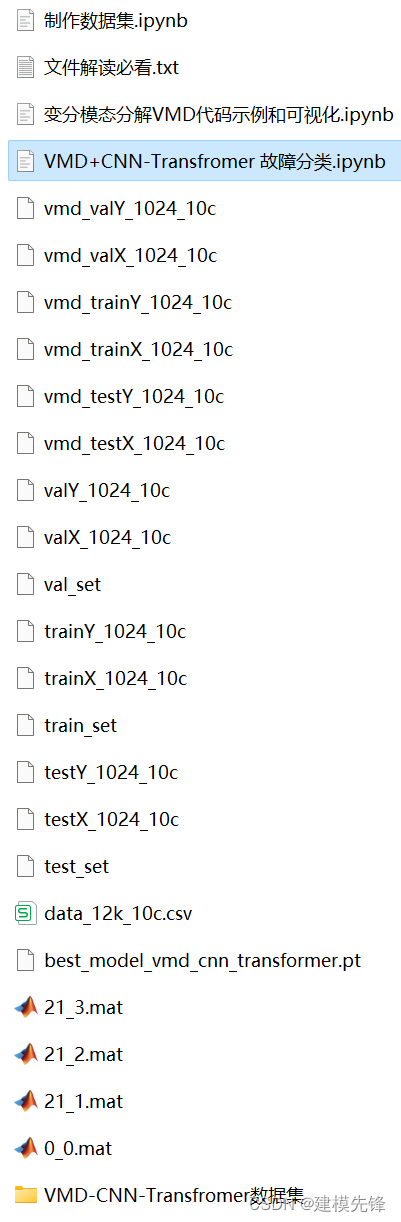
Python轴承故障诊断 (十)基于VMD+CNN-Transfromer的故障分类
目录 1 变分模态分解VMD的Python示例 2 轴承故障数据的预处理 2.1 导入数据 2.2 故障VMD分解可视化 3 基于VMDCNN-Transformer的轴承故障诊断分类 3.1 定义VMD-CNN-Transformer分类网络模型 3.2 设置参数,训练模型 3.3 模型评估 代码、数据如下:…...
【复习】人工智能 第7章 专家系统与机器学习
专家系统就是让机器人当某个领域的专家,但这章专家系统不咋考,主要靠书上没有的机器学习。 一、专家系统的基本组成 二、专家系统与传统程序的比较 (1)编程思想: 传统程序 数据结构 算法 专家系统 知识 推理 &…...
使用 Apache PDFBox 操作PDF文件
简介 Apache PDFBox库是一个开源的Java工具,专门用于处理PDF文档。它允许用户创建全新的PDF文件,编辑现有的PDF文档,以及从PDF文件中提取内容。此外,Apache PDFBox还提供了一些命令行实用工具。 Apache PDFBox提供了创建、渲染、…...

【Python 常用脚本及命令系列 3.2 -- 检测到弹框跳出然后关掉它--脚本实现】
文章目录 简介脚本实现 简介 在Python中,你可以使用第三方库如pyautogui和pygetwindow来检测屏幕上的弹框并关闭它。这些库可以模拟鼠标和键盘操作,也可以获取窗口信息。 首先,需要安装这些库(如果你还没有安装的话)&…...
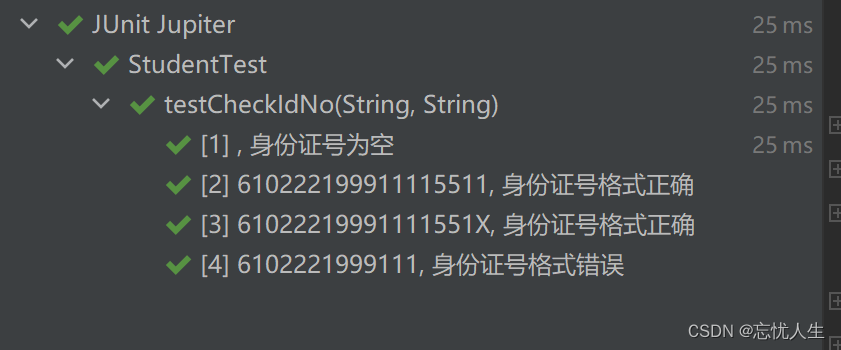
junit单元测试:使用@ParameterizedTest 和 @CsvSource注解简化单元测试方法
在平常的开发工作中,我们经常需要写单元测试。比如,我们有一个校验接口,可能会返回多种错误信息。我们可以针对这个接口,写多个单元测试方法,然后将其场景覆盖全。那么,怎么才能写一个测试方法,…...

C# winform判断自身程序是否已运行,如果已运行则激活窗体
C# winform判断自身程序是否已运行,如果已运行则激活窗体 using System; using System.Collections.Generic; using System.Diagnostics; using System.Linq; using System.Reflection; using System.Runtime.InteropServices; using System.Threading; using Syst…...
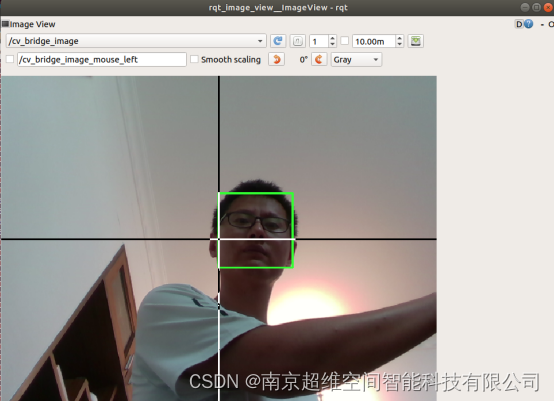
超维空间M1无人机使用说明书——21、基于opencv的人脸识别
引言:M1型号无人机不仅提供了yolo进行物体识别,也增加了基于opencv的人脸识别功能包,仅需要启动摄像头和识别节点即可 链接: 源码链接 一、一键启动摄像头和人脸识别节点 roslaunch robot_bringup bringup_face_detect.launch无报错&#…...
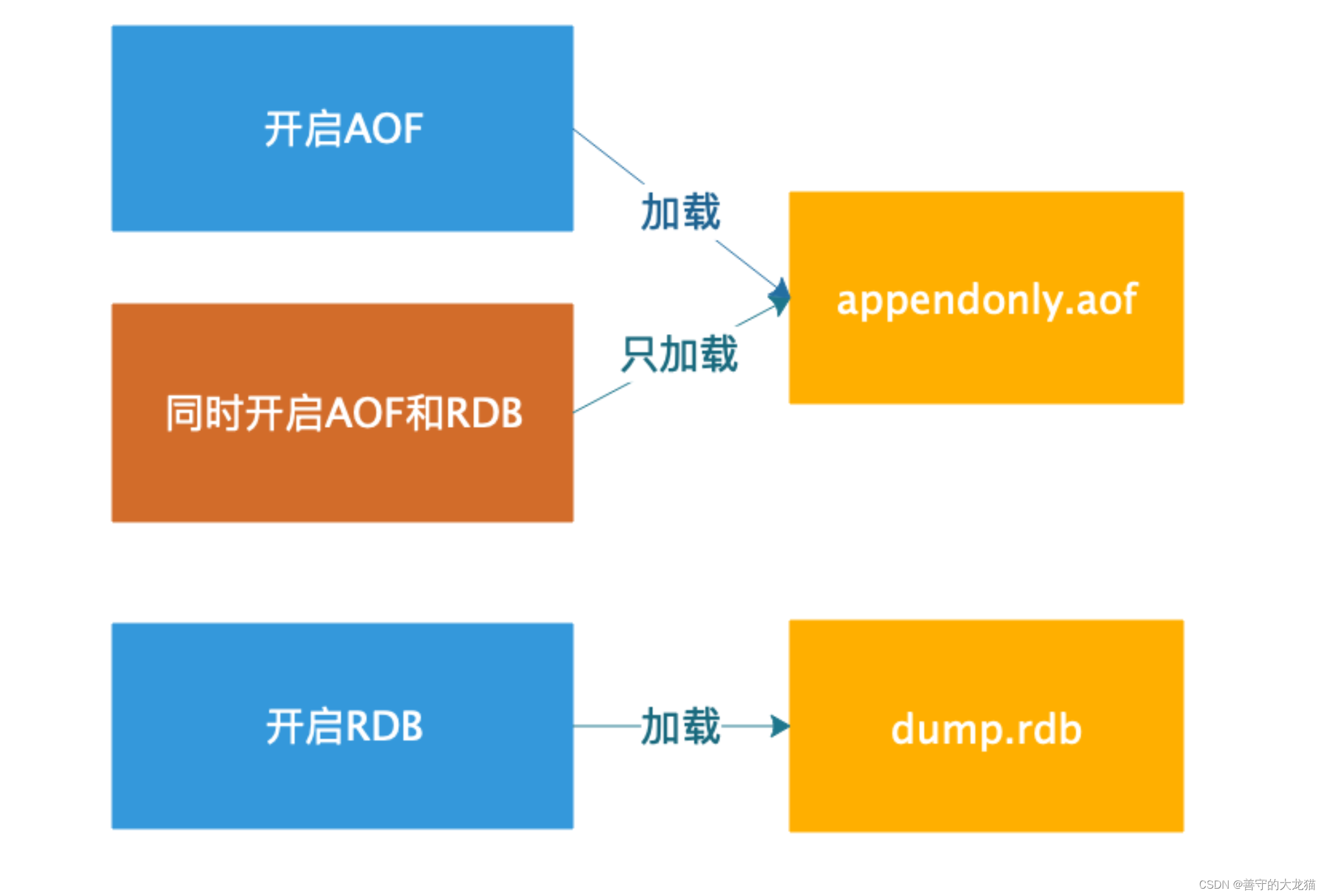
Redis 持久化——AOF
文章目录 为什么需要AOF?概念持久化查询和设置1. 查询AOF启动状态2. 开启AOF持久化2.1 命令行启动AOF2.2 配置文件启动 AOF 3. 触发持久化3.1 自动触发3.3 手动触发 4. AOF 文件重写4.1 什么是AOF重写?4.2 AOF 重写实现4.3 AOF 重写流程 5. 配置说明6. 数据恢复6.1…...
)
华为云服务介绍(二)
在 华为云服务介绍(一) 中我们看到华为云提供了一系列的云服务,包括计算、存储、网络、数据库、安全等方面的解决方案。通过灵活的系统架构设计,可以充分利用这些云服务技术,从而更好地满足用户的需求。 本文从系统架构的角度出发,通过充分利用华为云提供的各种云服务技…...

mysql列题
mysql列题 1.查询学过「张三」老师授课的同学的信息2.查询没有学全所有课程的同学的信息3.查询没学过"张三"老师讲授的任一门课程的学生姓名4.查询两门及其以上不及格课程的同学的学号,姓名及其平均成绩5.检索" 01 "课程分数小于 60,…...

cpu缓存一致性
文章目录 cpu缓存一致性缓存的出现:多核之后带来的缓存一致性问题,如何解决LOCK 指令(刚好可以实现上述的目标)LOCK 指令特性内存屏障特性编译器屏障的作用MESI协议为什么有了 MESI协议 还需要 内存屏障问题:总结&…...
定制CPUSET解决方案-framework部分修改)
Android Framework 常见解决方案(25-1)定制CPUSET解决方案-framework部分修改
1 原理说明 这个方案有如下基本需求: 构建自定义CPUSET,/dev/cpuset中包含一个全新的cpuset分组。且可以通过set_cpuset_policy和set_sched_policy接口可以设置自定义CPUSET。开机启动后可以通过zygote判定来对特定的应用进程设置CPUSET,并…...

PyTorch 参数化深度解析:自定义、管理和优化模型参数
目录 torch.nn子模块parametrize parametrize.register_parametrization 主要特性和用途 使用场景 参数和关键字参数 注意事项 示例 parametrize.remove_parametrizations 功能和用途 参数 返回值 异常 使用示例 parametrize.cached 功能和用途 如何使用 示例…...
自承载 Self-Host ASP.NET Web API 1 (C#)
本教程介绍如何在控制台应用程序中托管 Web API。 ASP.NET Web API不需要 IIS。 可以在自己的主机进程中自托管 Web API。 创建控制台应用程序项目 启动 Visual Studio,然后从“开始”页中选择“新建项目”。 或者,从“ 文件 ”菜单中选择“ 新建 ”&a…...

Vue2-子传父和父传子的基本用法
在Vue 2中,可以使用props和$emit来实现子组件向父组件传值(子传父)和父组件向子组件传值(父传子)。 子传父(子组件向父组件传值)的基本用法如下: 在父组件中定义一个属性ÿ…...
DenseNet参数量比ResNet少?从Bottleneck和Transition层设计,聊聊模型轻量化的核心思路
DenseNet与ResNet参数效率对比:从结构设计看模型轻量化本质 在深度学习模型设计中,参数量与计算效率一直是工程师们关注的核心指标。当DenseNet首次提出时,许多研究者对其参数效率感到惊讶——看似复杂的密集连接结构,实际参数量却…...
)
手把手教你用Gstreamer和V4L2在Zynq MPSoC上搭建视频流Pipeline(HDMI IN to DP OUT)
从HDMI到DP:Zynq MPSoC视频流处理全链路实战指南 当你的Zynq MPSoC开发板已经完成硬件设计,Petalinux系统也顺利启动,却发现HDMI输入的视频信号无法正确显示在DP接口的显示器上——这种"最后一公里"的集成问题往往最令人抓狂。本文…...

Cloudflare + PlanetScale:在边缘运行全栈应用,数据库也不例外
全栈开发者面对的一道老难题 Cloudflare Workers 解决了计算层的全球分发问题——你的代码跑在 Cloudflare 遍布全球的 300 多个数据中心里,离用户近,启动快,不需要管理任何服务器。 但数据不一样。 数据库天然是"有状态的"&#x…...

GDScript Mod Loader:为Godot游戏打造专业模组生态的完整指南
1. 项目概述:为你的Godot游戏注入社区活力如果你是一名使用Godot引擎的独立游戏开发者,或者是一位热衷于为喜爱的游戏创造新内容的玩家,那么“模组”这个概念你一定不陌生。模组,或者说Mod,是游戏社区生命力的重要源泉…...

别再只靠EWSA了!聊聊WPA密码破解的几种姿势与效率对比
WPA密码破解工具全维度评测:从EWSA到Hashcat的实战指南 在无线安全评估领域,WPA/WPA2密码破解始终是绕不开的技术课题。当安全研究员获得合法授权的握手包后,如何高效完成密码恢复任务?市面上既有EWSA这样的老牌图形化工具&#x…...

PyTorch模型参数管理:从torch.nn.Parameter到高效训练实践
1. 理解torch.nn.Parameter的本质 第一次接触PyTorch的torch.nn.Parameter时,我也曾困惑它和普通Tensor的区别。直到在实际项目中踩了几个坑,才真正明白它的价值。让我们从一个简单的例子开始: import torch import torch.nn as nn# 普通Te…...

视频字幕提取神器:如何让AI帮你自动转录硬字幕?
视频字幕提取神器:如何让AI帮你自动转录硬字幕? 【免费下载链接】video-subtitle-extractor 视频硬字幕提取,生成srt文件。无需申请第三方API,本地实现文本识别。基于深度学习的视频字幕提取框架,包含字幕区域检测、字…...

为什么92%的AI企业还没部署TEE for AI?,20年系统安全专家亲历的4类认知盲区与2026合规倒计时应对清单
更多请点击: https://intelliparadigm.com 第一章:AI原生可信执行环境:2026奇点智能技术大会TEE for AI 在2026奇点智能技术大会上,TEE for AI(AI-Native Trusted Execution Environment)正式成为下一代AI…...

MILCOM 2011技术风向:软件定义无线电、GaN与宽带测试的军用射频演进
1. 展会现场直击:MILCOM 2011的技术脉搏作为一名在射频微波和测试测量领域摸爬滚打了十几年的工程师,我对MILCOM(军事通信会议)这类展会总有一种特殊的感情。它不像那些消费电子展那样光鲜亮丽,人头攒动,但…...

从业者必看:医药资质认证服务核心知识梳理
如果你是初创医疗器械贸易商创始人、医美诊所创业者、连锁药店负责人或是医药电商运营人员,正面临缺证无法入驻平台、自行办理流程繁琐反复被驳回、赶大促节点急需下证等问题,想要了解医药资质认证服务相关内容,这篇科普内容会为你梳理清楚全…...