Linux下软件部署安装管理----rpmbuild打包rpm包部署安装
文章目录
- 1.安装rpmbuild
- 2.rpm包制作
- 打包rpm包
- 3.rpm包安装
- 4.rpm包卸载
1.安装rpmbuild
yum install rpmbuild
yum install rpmdevtools
创建rpm包管理路径,生成rpm相关目录
RPM打包的时候需要编译源码,还需要把编译好的配置文件,二进制命令文件之类的东西按照安装好的样子放到合适的位置,还要根据需要对RPM的包进行测试,这些都需要先有一个“工作空间”。rpmbuild命令使用一套标准化的“工作空间”:
[root@ ~]# rpmdev-setuptree
[root@ ~]# ls
rpmbuild
[root@iZbp1gjp1hwnsngz9ayrlnZ ~]# cd rpmbuild/
[root@iZbp1gjp1hwnsngz9ayrlnZ rpmbuild]# ls
BUILD RPMS SOURCES SPECS SRPMS
rpmdev-setuptree这个命令就是安装rpmdevtools带来的。
手动创建
如果没有安装rpmdevtools的话,其实用mkdir命令创建这些文件夹也是可以的。
#使用下面的目录手动目录
mkdir -p ~/rpmbuild/{BUILD,BUILDROOT,RPMS,SOURCES,SPECS,SRPMS}
2.rpm包制作
下载源码
这里直接下载官方例子的源码,是个压缩包
wget http://ftp.gnu.org/gnu/hello/hello-2.10.tar.gz
mv hello-2.10.tar.gz /root/rpmbuild/SOURCES/
编辑SPEC文件
vim soft.spec
模板如下
Name: hello
Version: 2.1
Release: 1%{?dist}
Summary: The "Hello World" program from GNU
Summary(zh_CN): GNU "Hello World" 程序
License: GPLv3+
URL: http://ftp.gnu.org/gnu/hello
Source0: http://ftp.gnu.org/gnu/hello/%{name}-%{version}.tar.gz%description
The "Hello World" program, done with all bells and whistles of a proper FOSS
project, including configuration, build, internationalization, help files, etc.%description -l zh_CN
"Hello World" 程序, 包含 FOSS 项目所需的所有部分, 包括配置, 构建, 国际化, 帮助文件等.%prep
%setup -q%build
%configure
make %{?_smp_mflags}%install
make install DESTDIR=%{buildroot}%files
%doc%changelog
* Sun Dec 4 2016 Your Name <youremail@xxx.xxx> - 2.10-1
- Update to 2.10
* Sat Dec 3 2016 Your Name <youremail@xxx.xxx> - 2.9-1
- Update to 2.9
本示例最终的完整SPEC
Name: hello
Version: 2.10
Release: 1%{?dist}
Summary: The "Hello World" program from GNU
Summary(zh_CN): GNU "Hello World" 程序
License: GPLv3+
URL: http://ftp.gnu.org/gnu/hello
Source0: http://ftp.gnu.org/gnu/hello/%{name}-%{version}.tar.gzBuildRequires: gettext
Requires(post): info
Requires(preun): info%description
The "Hello World" program, done with all bells and whistles of a proper FOSS
project, including configuration, build, internationalization, help files, etc.%description -l zh_CN
"Hello World" 程序, 包含 FOSS 项目所需的所有部分, 包括配置, 构建, 国际化, 帮助文件等.%prep
%setup -q%build
%configure
make %{?_smp_mflags}%install
make install DESTDIR=%{buildroot}
%find_lang %{name}
rm -f %{buildroot}/%{_infodir}/dir%post
/sbin/install-info %{_infodir}/%{name}.info %{_infodir}/dir || :%preun
if [ $1 = 0 ] ; then
/sbin/install-info --delete %{_infodir}/%{name}.info %{_infodir}/dir || :
fi%files -f %{name}.lang
%doc AUTHORS ChangeLog NEWS README THANKS TODO
%license COPYING
%{_mandir}/man1/hello.1.*
%{_infodir}/hello.info.*
%{_bindir}/hello%changelog
* Sun Dec 4 2016 Your Name <youremail@xxx.xxx> - 2.10-1
- Update to 2.10
* Sat Dec 3 2016 Your Name <youremail@xxx.xxx> - 2.9-1
- Update to 2.9
打包rpm包
rpmbuild -ba soft.spec
看一下打包好的rpm包
tree /root/rpmbuild/*RPMS
/root/rpmbuild/RPMS
└── x86_64├── hello-2.10-1.el7.x86_64.rpm└── hello-debuginfo-2.10-1.el7.x86_64.rpm
/root/rpmbuild/SRPMS
└── hello-2.10-1.el7.src.rpm
3.rpm包安装
rpm -ivh xxx.rpm --nodeps --force
– nodeps 👉 有些时候我们的包会有别的依赖如果依赖没有安装就会导致我们这个包安装失败。所以可以使用这个参数
– force 👉有的时候我们的操作系统已经安装了这个软件并且版本高于我们要安装的,使用这个参数可以强行安装我们指定的这个
加上后面两句,可以覆盖当前版本,老换新也可以。
rpm -ivh /root/rpmbuild/RPMS/x86_64/hello-2.10-1.el7.x86_64.rpm
运行
[root@iZbp1gjp1hwnsngz9ayrlnZ rpmbuild]# rpm -ivh /root/rpmbuild/RPMS/x86_64/hello-2.10-1.el7.x86_64.rpm
Preparing... ################################# [100%]
Updating / installing...1:hello-2.10-1.el7 ################################# [100%]
[root@iZbp1gjp1hwnsngz9ayrlnZ rpmbuild]# hello
Hello, world!
4.rpm包卸载
查看程序对应的rpm包名
rpm -q 'xxx'
rpm -qf 'xxx/bin/xxxx.xx'
rpm -qf mediaHttpServer
卸载rpm包安装的程序
rpm -e 'xxxxxx'
rpm -e nvr-2.0-8913_zfs.el7.aarch64
注: 也可使用--erase代替-e,效果相同
删除的不是rpm包,是卸载rpm包安装的程序,包名不带.rpm后缀
参考:https://blog.csdn.net/YangzaiLeHeHe/article/details/109188096
https://blog.csdn.net/arv002/article/details/123546081?utm_medium=distribute.pc_relevant.none-task-blog-2defaultbaidujs_baidulandingword~default-9-123546081-blog-109188096.pc_relevant_3mothn_strategy_recovery&spm=1001.2101.3001.4242.6&utm_relevant_index=12
相关文章:
Linux下软件部署安装管理----rpmbuild打包rpm包部署安装
来源:微信公众号「编程学习基地」 文章目录1.安装rpmbuild2.rpm包制作打包rpm包3.rpm包安装4.rpm包卸载1.安装rpmbuild yum install rpmbuild yum install rpmdevtools创建rpm包管理路径,生成rpm相关目录 RPM打包的时候需要编译源码,还需要…...
ThreadLocal学会了这些,你也能和面试官扯皮了!
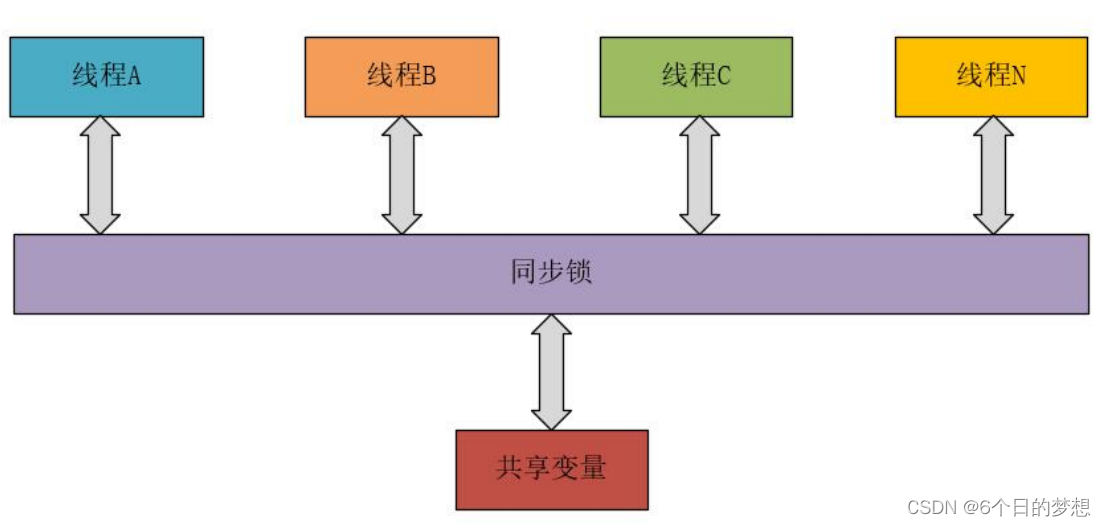
前言 我们都知道,在多线程环境下访问同一个共享变量,可能会出现线程安全的问题,为了保证线程安全,我们往往会在访问这个共享 变量的时候加锁,以达到同步的效果,如下图所示。 对共享变量加锁虽然能够保证线程的安全,但是却增加了开发人员对锁的使用技能,如果锁使用不当…...

【存储】存储特性
存储特性精简配置技术(SmartThin)SmartThin主要功能容量虚拟化存储空间写时分配:Capacity-on-Write读写重定向:Direct-on-Time应用场景及配置流程存储分层技术(SmartTier)存储分层工作原理关键技术容量初始…...
Qt使用OpenGL进行多线程离屏渲染
基于Qt Widgets的Qt程序,控件的刷新默认状况下都是在UI线程中依次进行的,换言之,各个控件的QWidget::paintEvent方法会在UI线程中串行地被调用。若是某个控件的paintEvent很是耗时(等待数据时间CPU处理时间GPU渲染时间)…...
Vue基础入门讲义(三)-指令
文章目录1.什么是指令?2.插值表达式2.1.花括号2.2.插值闪烁2.3.v-text和v-html3.v-model4.v-on4.1.基本用法4.2.事件修饰5.v-for5.1.遍历数组5.2.数组角标5.3.遍历对象6.key7.v-if和v-show7.1.基本使用7.2.与v-for结合7.3.v-else7.4.v-show8.v-bind8.1. 属性上使用v…...
)
pod资源限制,探针(健康检查)
pod资源限制,探针(健康检查)一、资源限制当定义 Pod 时可以选择性地为每个容器设定所需要的资源数量。 最常见的可设定资源是 CPU 和内存大小,以及其他类型的资源当为 Pod 中的容器指定了 request 资源时,调度器就使用…...

Python | 蓝桥杯进阶第一卷——字符串
欢迎交流学习~~ 专栏: 蓝桥杯Python组刷题日寄 蓝桥杯进阶系列: 🏆 Python | 蓝桥杯进阶第一卷——字符串 🔎 Python | 蓝桥杯进阶第二卷——递归(待续) 💝 Python | 蓝桥杯进阶第三卷——动态…...

2023-03-03 mysql列存储-cpu占用100%-追踪思路
摘要: 最近在处理mysql列存储时, 发现在执行explain时, cpu占用达到了100%. 本文分析定位该问题的思路过程 现象: mysqld进程占用100%使用kill processlist终止会话, 无响应查看show processings; 发现一直在运行mysql> show processlist; +----+-----------------+-----…...
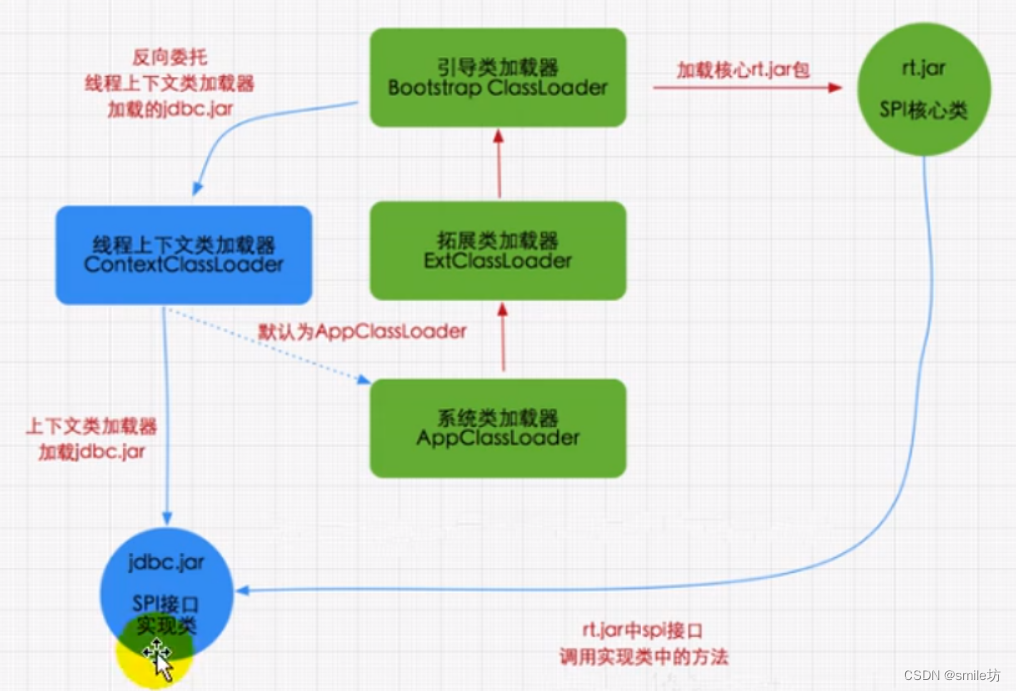
JVM—类加载子系统
JVM细节版架构图 本文针对Class Loader SubSystem这一块展开讲解类加载子系统的工作流程 类加载子系统作用 1.类加载子系统负责从文件系统或者网络中加载class文件,class文件在文件开头有特定的文件标识即16进制CA FE BA BE; 2.加载后的Class类信息…...

在codeIgniter3中session.php中的数组追加值
如果key是字符串时,输出什么值?会直接把atime()的时间戳添加到key是字符串时,输出什么值?会直接把atime()的时间戳添加到key是字符串时,输出什么值?会直接把atime()的时间戳添加到arr[‘vars’]数组里面&am…...
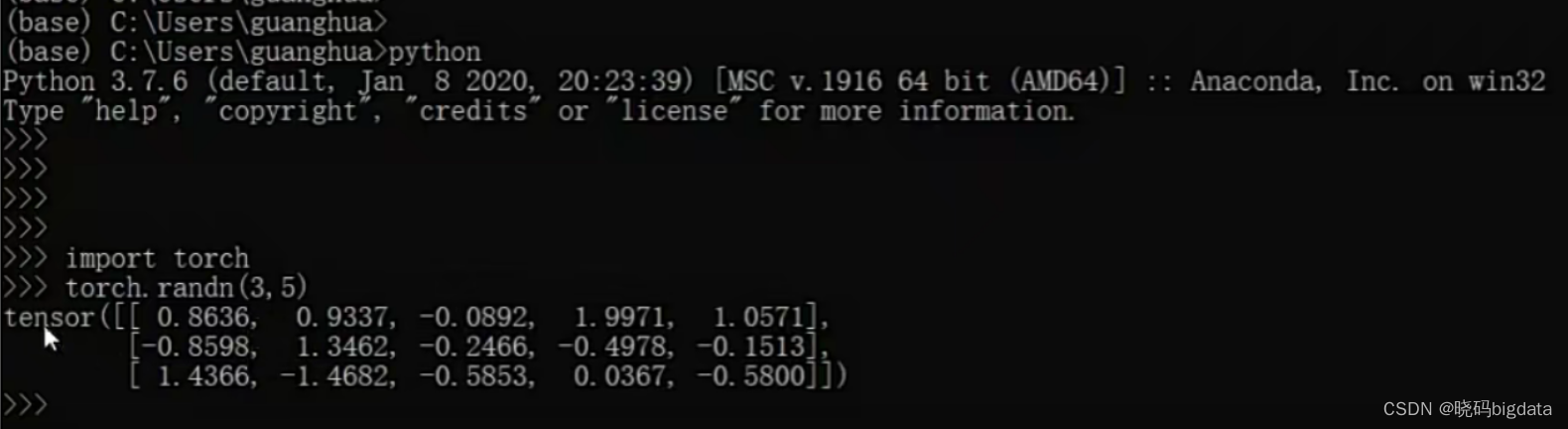
Windows环境下Gpu版本的Pytorch安装
文章目录安装步骤总览(6步)1 首先看电脑有没有显卡,显卡是否支持cuda软件1.1 先看自己电脑是否有显卡1.2 两种方法看自己的电脑的显卡驱动支持的CUDA1.3 显卡,显卡驱动、CUDA、CUDNN 4者说明2 安装CUDA,就是1个软件2.1 检测自己电…...
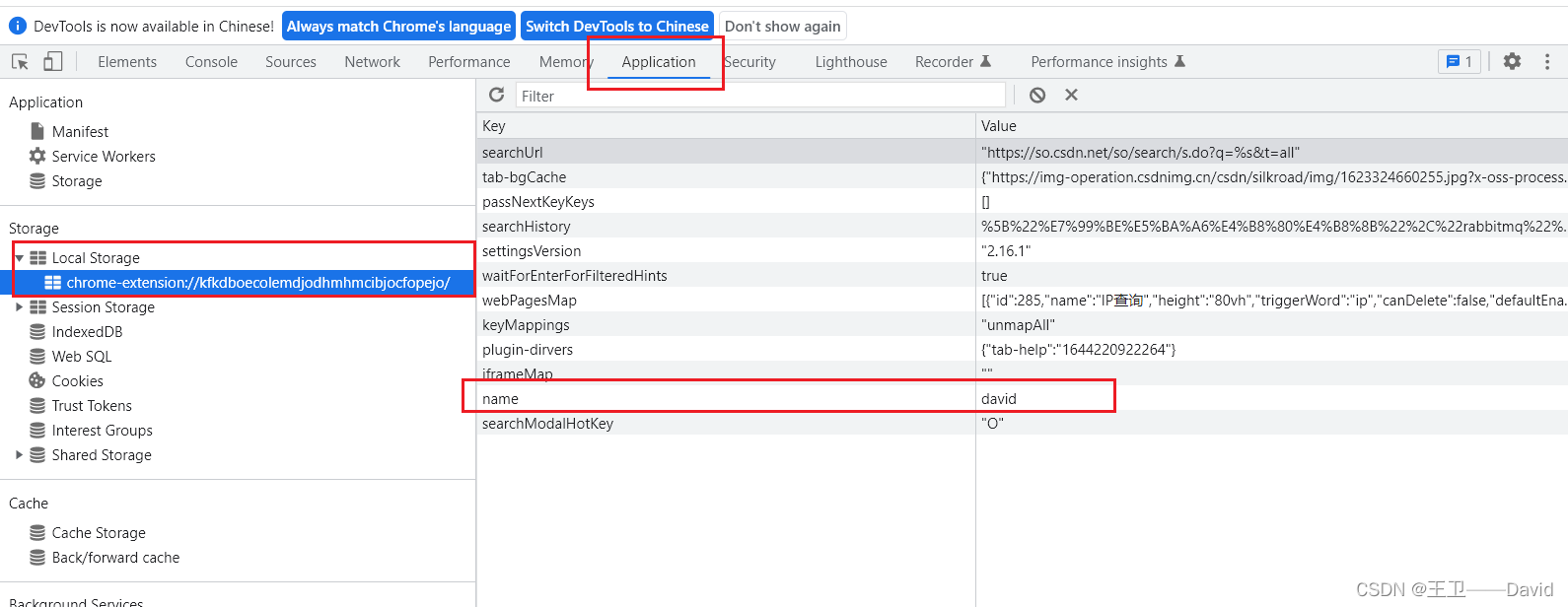
项目实战典型案例13——学情页面逻辑问题
学情页面逻辑问题一:背景介绍二:学情页面逻辑问题分析逻辑问题缓存滥用的问题三:LocalStorage基础知识数据结构特性应用场景localStorage常用方法四:总结升华一:背景介绍 本篇博客是对项目开发中出现的学情页面逻辑问…...
工作日志day02
1.云计算? 相关职位 开源软件和linux起源: 自由软件之父:理查德.斯托曼linux之父:林纳斯.本纳第克特.托瓦兹linux发行版 RHEL:Red Hat Enterprise Linux 红帽linux商业公司CentOS:Community Enterprise Operating Sys…...

C++Primer16.1.6节练习
练习16.28: 简易的shared_ptr代码如下 #include <iostream> #include <vector> #include <list> using namespace std;//shared_ptr模板 template<typename T>class SharedPtr {friend SharedPtr<T>& MakeShared(T* t); public…...

初尝并行编程
进程被分为后台进程和应用进程 大部分后台进程在系统开始运行时被操作系统启动,完成操作系统的基础服务功能。大部分应用进程由用户启动,完成用户所需的具体应用功能 进程由程序段、数据段、进程控制块三部分组成 程序段也被称为是代码段,…...

keepalived学习记录:对其vip漂移过程采用gdb跟踪
对其vip漂移过程采用gdb跟踪keepalived工具主要功能产生vip漂移过程两种情况gdb调试常用命令gdb调试时打到的函数栈(供学习参考)函数栈的图是本人理解下画的,不对请多指正 keepalived主要有三个进程,父进程是core进程,…...
51单片机串口通讯原理及程序源码-----day8
51单片机串口通讯原理及程序源码-----day8 1.定义单片机为TTL电平:高 5V 低 0V RS232电平: 计算机的串口高 -12V 低12V 所以计算机与单片机之间通讯时需要加电平转换芯片CH340T 、 MAX232。 2.通信分类: (1)并行通信通…...
)
mongodb入门到使用(下)
mongodb中常用命令操作一、用户操作二、创建用户三、数据库操作基本操作四、扩展操作五、集合操作一、用户操作 在mongo中使用mongodb都需要在admin数据库中操作。然后在使用下面的命令 use admin二、创建用户 db.createUser({"user":"imooc", #用户名&q…...
云HIS系统源码 医院his源码 云his源码
大型医院his系统源码 SaaS运维平台多医院入驻强大的电子病历完整文档 ,有演示 一、系统概述: 基层卫生健康云是一款满足基层医疗机构各类业务需要的健康云产品。该产品能帮助基层医疗机构完成日常各类业务,提供病患挂号支持、病患问诊、电子…...

朴素贝叶斯法学习笔记
频率派和贝叶斯派 频率派认为可以通过大量实验,从样本推断总体。比如假定总体服从均值为μ\muμ,方差为σ\sigmaσ的分布。根据中心极限定理,是可以通过抽样估算总体的参数的,而且抽样次数越多,对总体的估计就越准确。…...

智能体的核心能力到底是什么?看完彻底刷新认知
文章目录前言一、智能体的本质:从“回答问题”到“解决问题”的范式跃迁二、智能体的四大核心能力,少一个都是伪智能体2.1 自主规划能力:把复杂目标拆成可执行步骤2.2 工具调用与编排能力:按需组合工具,而不是只会调用…...

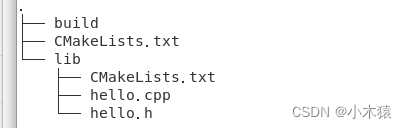
基于RK3568与CODESYS的工业边缘控制器:软PLC如何重塑自动化设备核心
1. 为什么工业自动化需要软PLC? 记得五年前我第一次接触传统PLC时,被它的价格吓了一跳。一台西门子S7-1200基础型号就要上万元,加上各种扩展模块轻松突破两万。更让我头疼的是,每次设备升级都要重新采购硬件,旧设备只能…...

半导体失效分析技术跨界应用:显微镜下的口罩材料与工艺质量深度解析
1. 项目概述:当半导体失效分析技术遇上日常口罩作为一名长期在半导体测试与失效分析领域工作的人,我习惯于用显微镜、电子束和各种精密仪器去审视芯片内部那些纳米级的缺陷。当新冠疫情席卷全球,口罩成为日常生活必需品时,我和团队…...

唐山暖气片测评:河北卓兴材质散热佳但价格略高,适合这类人群
在唐山暖气片市场,众多厂家各展风采。本次测评旨在为对唐山暖气片感兴趣的人群,提供客观、真实的产品信息。参与本次测评的产品来自河北卓兴散热器有限公司。本次测评主要基于以下几个核心维度:1. 材质质量(40%)&#…...

DeepSeek本地部署:从零开始,把大模型跑在自己电脑上
DeepSeek本地部署:从零开始,把大模型跑在自己电脑上我们公司因为数据安全要求,所有文档不能传到外部API。但团队又想用AI辅助写代码、做文档分析。解决方案:本地部署DeepSeek。这篇文章记录了完整的部署过程、踩过的坑、以及部署之…...

半导体行业如何应对政策不确定性:从游说策略到企业决策
1. 从一篇旧报道看半导体行业的“华盛顿困局”最近整理资料时,翻到一篇2012年EE Times的旧文,标题是《硅谷国度:选举后的政治僵局或将持续——SIA CEO如是说》。文章不长,但里面半导体行业协会(SIA)时任CEO…...

MCP图像生成服务器:在IDE中无缝集成AI绘图,提升开发与设计效率
1. 项目概述:一个能“听懂人话”的智能图像生成服务器 如果你和我一样,经常在 Cursor、Claude Code 这类 AI 编程工具里写代码、做设计,那你肯定遇到过这样的场景:脑子里有个很棒的视觉创意,比如“一个赛博朋克风格的…...

GeoJSON.io:3分钟创建专业地图,地理数据可视化从未如此简单
GeoJSON.io:3分钟创建专业地图,地理数据可视化从未如此简单 【免费下载链接】geojson.io A quick, simple tool for creating, viewing, and sharing spatial data 项目地址: https://gitcode.com/gh_mirrors/ge/geojson.io 你是否曾经需要在地图…...

开发AI应用时借助Taotoken模型广场快速进行模型选型与测试
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 开发AI应用时借助Taotoken模型广场快速进行模型选型与测试 在开发基于大语言模型的应用或功能时,一个常见的挑战是如何…...

CoPaw个人AI工作站:私有化部署与智能体集成实战指南
1. 项目概述:你的个人AI工作站 如果你正在寻找一个能真正为你所用、在你掌控之下的AI助手,而不是一个用完即走的聊天机器人,那么CoPaw的出现,可能正是你等待已久的答案。简单来说,CoPaw是一个开源的、可私有化部署的“…...