Kotlin DSL C++项目引入OpenCV异常处理
现象
kotlin DSL(build.rgadle.kts)项目引入openCV sdk 编译提示Plugin [id: 'com.android.application', version: '8.2.1'...错误
Plugin [id: 'com.android.application', version: '8.2.1', apply: false] was not found in any of the following sources:* Try:
> Run with --info or --debug option to get more log output.
> Run with --scan to get full insights.
> Get more help at https://help.gradle.org.* Exception is:
org.gradle.api.plugins.UnknownPluginException: Plugin [id: 'com.android.application', version: '8.2.1', apply: false] was not found in any of the following sources:- Gradle Core Plugins (plugin is not in 'org.gradle' namespace)
- Plugin Repositories (could not resolve plugin artifact 'com.android.application:com.android.application.gradle.plugin:8.2.1')Searched in the following repositories:Gradle Central Plugin Repository ...
原因
openCV sdk 中使用的是Groovy DSL(build.gradle)
解决方案
将项目中settings.gradle文件中内容拷贝到settings.gradle.kts后将之删除
将openCV sdk Module 下build.gradle改成build.gradle.kts
附:build.gradle.kts
import com.android.build.api.dsl.JniLibsPackaging// This file is part of OpenCV project.
// It is subject to the license terms in the LICENSE file found in the top-level directory
// of this distribution and at http://opencv.org/license.html.//
// Notes about integration OpenCV into existed Android Studio application project are below (application 'app' module should exist).
//
// This file is located in <OpenCV-android-sdk>/sdk directory (near 'etc', 'java', 'native' subdirectories)
//
// Add module into Android Studio application project:
//
// - Android Studio way:
// (will copy almost all OpenCV Android SDK into your project, ~200Mb)
//
// Import module: Menu -> "File" -> "New" -> "Module" -> "Import Gradle project":
// Source directory: select this "sdk" directory
// Module name: ":opencv"
//
// - or attach library module from OpenCV Android SDK
// (without copying into application project directory, allow to share the same module between projects)
//
// Edit "settings.gradle" and add these lines:
//
// def opencvsdk='<path_to_opencv_android_sdk_rootdir>'
// // You can put declaration above into gradle.properties file instead (including file in HOME directory),
// // but without 'def' and apostrophe symbols ('): opencvsdk=<path_to_opencv_android_sdk_rootdir>
// include ':opencv'
// project(':opencv').projectDir = new File(opencvsdk + '/sdk')
//
//
//
// Add dependency into application module:
//
// - Android Studio way:
// "Open Module Settings" (F4) -> "Dependencies" tab
//
// - or add "project(':opencv')" dependency into app/build.gradle:
//
// dependencies {
// implementation fileTree(dir: 'libs', include: ['*.jar'])
// ...
// implementation project(':opencv')
// }
//
//
//
// Load OpenCV native library before using:
//
// - avoid using of "OpenCVLoader.initAsync()" approach - it is deprecated
// It may load library with different version (from OpenCV Android Manager, which is installed separatelly on device)
//
// - use "System.loadLibrary("opencv_java4")" or "OpenCVLoader.initDebug()"
// TODO: Add accurate API to load OpenCV native library
//
//
//
// Native C++ support (necessary to use OpenCV in native code of application only):
//
// - Use find_package() in app/CMakeLists.txt:
//
// find_package(OpenCV 4.7 REQUIRED java)
// ...
// target_link_libraries(native-lib ${OpenCV_LIBRARIES})
//
// - Add "OpenCV_DIR" and enable C++ exceptions/RTTI support via app/build.gradle
// Documentation about CMake options: https://developer.android.com/ndk/guides/cmake.html
//
// defaultConfig {
// ...
// externalNativeBuild {
// cmake {
// cppFlags "-std=c++11 -frtti -fexceptions"
// arguments "-DOpenCV_DIR=" + opencvsdk + "/sdk/native/jni" // , "-DANDROID_ARM_NEON=TRUE"
// }
// }
// }
//
// - (optional) Limit/filter ABIs to build ('android' scope of 'app/build.gradle'):
// Useful information: https://developer.android.com/studio/build/gradle-tips.html (Configure separate APKs per ABI)
//
// splits {
// abi {
// enable true
// universalApk false
// reset()
// include 'armeabi-v7a' // , 'x86', 'x86_64', 'arm64-v8a'
// }
// }
//plugins {id("com.android.library")id("org.jetbrains.kotlin.android")
}val openCVersionName = "4.7.0-dev"
val openCVersionCode = ((4 * 100 + 7) * 100 + 0) * 10 + 0println("OpenCV: " + openCVersionName + " " + project.buildscript.sourceFile)android {namespace = "org.opencv"compileSdk = 34defaultConfig {minSdk = 24 testInstrumentationRunner = "androidx.test.runner.AndroidJUnitRunner"externalNativeBuild {cmake {arguments("-DANDROID_STL=c++_shared")targets("opencv_jni_shared")}}}buildTypes {debug {packaging { jniLibs{keepDebugSymbols.add("**/*.so")}} }release {packaging {jniLibs{keepDebugSymbols.add("**/*.so")}}isMinifyEnabled = falseproguardFiles(getDefaultProguardFile("proguard-android.txt"),"proguard-rules.pro")}}sourceSets {getByName("main") {jniLibs.srcDirs("native/libs")java.srcDirs("java/src")aidl.srcDirs("java/src")res.srcDirs("java/res")manifest.srcFile("java/AndroidManifest.xml")}}externalNativeBuild {cmake {path = file("${project.projectDir}/libcxx_helper/CMakeLists.txt")}}
}dependencies {
}相关文章:

Kotlin DSL C++项目引入OpenCV异常处理
现象 kotlin DSL(build.rgadle.kts)项目引入openCV sdk 编译提示Plugin [id: com.android.application, version: 8.2.1...错误 Plugin [id: com.android.application, version: 8.2.1, apply: false] was not found in any of the following sources:* Try: > Run with -…...

【微服务】 Spring cold、Kubernetes、Service mesh
目录 Spring Cloud # 什么是微服务?谈谈你对微服务的理解? # 什么是Spring Cloud? # springcloud中的组件有那些? # 具体说说SpringCloud主要项目? # Spring Cloud 和dubbo区别? # 服务注册和发现是什么意思?S…...

【scala】编译build报错 “xxx is not an enclosing class“
private[sources] val creationTimeMs: Long {val session SparkSession.getActiveSession.orElse(SparkSession.getDefaultSession)require(session.isDefined)private[xxx]是访问权限控制在xxxx包的意思。 解决办法: 把[sources]删掉,或者改成和包名…...
vue3+ts+vite项目从0 搭建,配置安装router/pinia/element-plus/scss等
一、安装vite环境 官网:https://cn.vitejs.dev/guide/why.html npm init vite1.选择vue 2.选择typescipt 3.创建成功 默认项目结构如下 4.安装项目依赖 npm install 5.启动项目 npm run dev二。安装配置scss 1.运行安装scss npm install -D sass sass-loa…...
)
华为OD机试 - 矩阵匹配(Java JS Python C)
题目描述 从一个 N * M(N ≤ M)的矩阵中选出 N 个数,任意两个数字不能在同一行或同一列,求选出来的 N 个数中第 K 大的数字的最小值是多少。 输入描述 输入矩阵要求:1 ≤ K ≤ N ≤ M ≤ 150 输入格式: N M K N*M矩阵 输出描述 N*M 的矩阵中可以选出 M! / N! 种组合数…...
使用ffmpeg实现音频静音修剪
1 silenceremove介绍 本文主要介绍在 FFmpeg 命令中使用 silenceremove filter 进行音频静音的修剪。 1.1 start_x参数 参数名说明取值范围默认值start_periods设置是否应在音频开头修剪音频。0 表示不应从一开始就修剪静音。当指定一个非 0 值时,它会修剪音频直…...
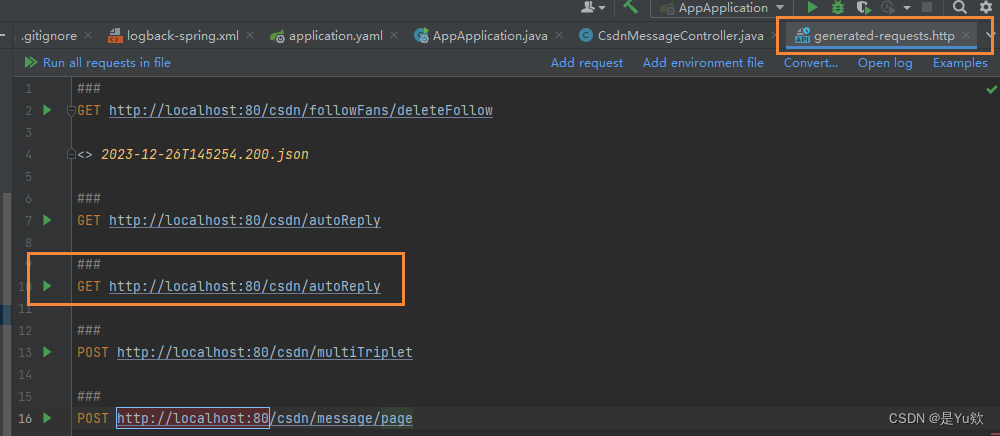
Java项目调试实战:如何高效调试Spring Boot项目中的GET请求,并通过equalsIgnoreCase()解决大小写不一致问题
Java项目调试实战:如何高效调试Spring Boot项目中的GET请求,并通过equalsIgnoreCase解决大小写不一致问题 写在最前面全部过程Java equalsIgnoreCase() 方法idea中如何调试SpringBoot项目在IntelliJ IDEA中使用内置HTTP客户端设置断点和调试 补充&#x…...
Google Pixel 与 iPhone手机:哪个更好?
iPhone稳定可靠,Pixel性价比高且创新。两者各有千秋,满足不同需求 谷歌的 Pixel 手机是 Android 最接近 iPhone 的手机,也是真正原生的Android手机。在iPhone 15 Pro Max 与华为 Mate 60 Pro的比较中不难看出,iPhone依然有着极强…...
)
ddos攻击会让服务器受到什么影响?-速盾网络(sudun)
DDoS攻击是一种网络攻击手段,它通过利用大量的请求或恶意流量超过服务器的处理能力,从而导致服务器无法正常工作或服务质量显著下降。 首先,DDoS攻击会对服务器的带宽造成极大的压力。攻击者会利用大量的机器或网络资源发起攻击,…...
NSSCTF Interesting_include
开启环境: 通过审计,我们可知: flag在flag.php中,可以利用php中伪协议 payload:?filterphp://filter/readconvert.base64-encode/resourceflag.php 将其base64解码就是flag. NSSCTF{3dc54721-be9e-444c-8228-7133fba76ad4}...

IPv6路由协议---IPv6动态路由(OSPFv3-5)
OSPFv3各链路状态通告类型 4.Inter-Area-Router-LSA区域间路由器(4类LSA) 边界路由器(ABR)产生的第4类LSA,在Area 范围内泛洪,描述了到本AS内其他区域的ASBR路由器信息; 每各Inter-Area-Router-LSA包含一个ASBR路由器信息,LSA中的能力选项(Options)与所描述的ASBR …...
GPT Store开业大吉:一场AI技术与创新的盛宴
就在1.11 日,ChatGPT 正式上线 GPT Store ! OpenAI CEO 山姆奥特曼第一时间确认了这个消息: 自从GPTs的概念提出以来,短短两个月内,全球用户已经创造了超过300万个GPTs。 点击 GPT Store 或者进入ChatGpt页面&am…...

Linux---gcc编译
目录 前言 一、gcc编译 二、程序的编译过程 三、gcc查看编译过程 1.预处理阶段 2.编译 3.汇编 4.链接 动静态库链接的内容 动静态库链接的优缺点 5.总结记忆 前言 在前面我们学会使用vim对文件进行编辑,如果是C或者C程序,我们编辑好了内容…...
使用阿里云镜像创建一个Spring Boot项目
由于现在的idea在创建项目时已经不支持Java8版本了,如果我们还想用8版本,可以使用阿里云镜像创建。所以得改变原有的地址为:https://start.aliyun.com springboot版本选择2开头的任意版本的。 1.配置6个依赖 2.改变下载依赖地址 下载依赖默认…...

工智能基础知识总结--词嵌入之Word2Vec
词嵌入要解决什么问题 在自然语言系统中,词被看作最为基本的单元,如何将词进行向量化表示是一个很基本的问题,词嵌入(word embedding)就是把词映射为低维实数域向量的技术。 下面先介绍几种词的离散表示技术,然后总结其缺点,最后介绍词的分布式表示及其代表技术(word2v…...

redis stream restTemplate消息监听队列框架搭建
整体思路 1. pom增加redis依赖; 2. 消息监听器,实现StreamListener接口,处理消息到达逻辑; 3. 将消息订阅bean及监听器注册到配置中; 1. pom <?xml version"1.0" encoding"UTF-8"?> <…...
【期末不挂科-C++考前速过系列P1】大二C++第1次过程考核(3道简述题&7道代码题)【解析,注释】
前言 大家好吖,欢迎来到 YY 滴C复习系列 ,热烈欢迎! 本章主要内容面向接触过C的老铁 主要内容含: 欢迎订阅 YY滴C专栏!更多干货持续更新!以下是传送门! YY的《C》专栏YY的《C11》专栏YY的《Lin…...

游戏开发中,你的游戏图片压缩格式使用ASTC了吗
文章目录 ASTC原理:使用要求 ASTC(Adaptive Scalable Texture Compression,自适应可伸缩纹理压缩)是一种高级的纹理压缩技术,由ARM公司开发并推广。它在图形处理领域中因其出色的压缩效率和灵活性而受到广泛关注。 AST…...

【PostgreSQL】数据查询-概述
PostgreSQL数据查询 概述 检索或从数据库中检索数据的命令的过程称为查询。在 SQL 中,SELECT 命令用于指定查询。该命令的一般语法是SELECT [WITH with_queries] SELECT select_list FROM table_expression [sort_specification]一种简单的查询形式为:…...

element input组件自动失去焦点问题解决
最近在 Vue3 ElementPlus 中,使用 el-input 组件时,如果设置了 v-model,那么在每次改变内容后后,input 会自动失去焦点,这样会导致用户无法输入多个字符。 一、问题原因 如上图所示,配置项的 Name 和 Cod…...

美国不断自我革新的历史,为这个国家面对充满巨大机遇却又充满不确定性的未来提供了引人深思的经验教训
https://www.mckinsey.com/mgi/our-research/At-250-sustaining-Americas-competitive-edge 美国不断自我革新的历史,为这个国家面对充满巨大机遇却又充满不确定性的未来提供了引人深思的经验教训 这一切始于一场惊天动地的反抗行动。 1776年7月,来自13…...

5分钟快速掌握Windows右键菜单终极管理神器ContextMenuManager
5分钟快速掌握Windows右键菜单终极管理神器ContextMenuManager 【免费下载链接】ContextMenuManager 🖱️ 纯粹的Windows右键菜单管理程序 项目地址: https://gitcode.com/gh_mirrors/co/ContextMenuManager 你是不是经常在右键文件时,面对几十个…...
安装与中文环境配置实战)
Halcon深度学习工具(DLT)安装与中文环境配置实战
1. Halcon DLT安装前的准备工作 第一次接触Halcon深度学习工具(DLT)时,我完全被各种专业术语搞晕了。后来才发现,只要做好前期准备,安装过程其实比想象中简单得多。首先需要确认的是你的Windows系统版本,DLT目前支持Windows 10和1…...

婚礼技能库:用开源协作与项目管理思维打造个性化婚礼
1. 项目概述:婚礼技能库的诞生与价值婚礼,对大多数人来说,是人生中为数不多的、需要同时扮演项目经理、创意总监、财务主管和情感联络员的高压事件。筹备过程琐碎繁杂,从场地布置、流程设计,到妆发造型、摄影摄像&…...

为AI编程助手构建安全防线:Cursor自定义规则实战指南
1. 项目概述:为AI编程助手装上“安全护栏” 如果你和我一样,深度使用Cursor这类AI编程助手,那你一定体验过它带来的效率革命。它能帮你生成代码、重构函数、甚至解释复杂的逻辑,就像一个不知疲倦的编程伙伴。但硬币总有另一面——…...

揭秘Midjourney“树胶重铬酸盐”风格指令:3步精准触发古典印相质感,92%用户从未用对的隐藏参数组合
更多请点击: https://intelliparadigm.com 第一章:树胶重铬酸盐工艺的光学原理与数字映射本质 树胶重铬酸盐(Gum Bichromate)工艺是19世纪末发展起来的经典光敏印相技术,其核心光学原理基于重铬酸盐在紫外光照射下发生…...

碳排放混合时间窗集装箱运输调度【附算法】
✨ 长期致力于集装箱运输VRP、混合时间窗、碳排放、多目标优化、NSGA-Ⅱ、蚁群算法研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)经济性与紧急性双目…...

开源提示词管理工具:本地化部署与AI工作流效率提升实践
1. 项目概述:一个为AI工作流设计的提示词管理利器如果你和我一样,每天都在和ChatGPT、Claude、Midjourney这些AI模型打交道,那你一定有过这样的烦恼:昨天精心调试好的、能稳定输出高质量代码的提示词,今天想用的时候&a…...

大语言模型分步推理与自我验证框架:提升AI生成准确性的工程实践
1. 项目概述:当AI学会“自我验证”最近在开源社区里,一个名为“Lets-Verify-Step-by-Step”的项目引起了我的注意。这个项目直指当前大语言模型(LLM)应用中的一个核心痛点:如何让模型在生成复杂答案时,能像…...

30亿条出行记录解密:如何用纽约出租车数据洞察城市脉搏 [特殊字符][特殊字符]
30亿条出行记录解密:如何用纽约出租车数据洞察城市脉搏 🚖📊 【免费下载链接】nyc-taxi-data Import public NYC taxi and for-hire vehicle (Uber, Lyft) trip data into a PostgreSQL or ClickHouse database 项目地址: https://gitcode.…...