高精度彩色3D相机:开启崭新的彩色3D成像时代
3D成像的新时代
近年来,机器人技术的快速发展促使对3D相机技术的需求不断增加,原因在于,相机在提高机器人的性能和实现多种功能方面发挥了决定性作用。然而,其中许多应用所需的解决方案更复杂,仅提供环境的深度信息是远远不够的。颜色区分或机器学习等高级图像处理技术需要其他基本数据,为满足这一要求,之前需要通过增加2D相机来实现。
友思特全新紧凑型 VST Ensenso C相机系统,集众多功能和特色于一身,可以更准确高效地捕捉和解析3D数据。
3D相机系统将提高机器人和自主系统的能力,拓宽多功能精确应用领域的使用范围。要实现这一点,3D相机技术必须跟上新的市场要求,这并不需要技术革命。不过,当前的系统很少能够在集合多个组件的同时还能易于操作和集成,这使得应用开发方式往往复杂且成本高昂。即便系统更为复杂,但是只有方便易用才更具实用价值。
预组装方式便于快速调试
一类设备可以完全定制,一类设备则是方便易用的标准设备,它们之间的主要区别在于可配置性和灵活性,以及设置和调试的工作量。如何选择取决于个人需求和应用场景。完全可定制的设备更加自由灵活,但也需要更多的技术专业知识并会耗费更多调试时间。与之相反,标准设备易于使用,只需少量调整工作就能完成具体任务。
在发布全新C系列后,这两种设备与高度灵活的X系列一起,丰富了VST Ensenso家族的高端相机阵营。您可以使用VST Ensenso相机选型器为具体应用选择合适的标准型号,立即投入使用。

紧凑型VST Ensenso C相机系统 可预装各种立体基线
集成2D彩色图像的3D
VST Ensenso立体测量方法的一个优点是,通过SDK始终可以获得立体相机的2D图像。因此,SDK不仅可以提供深度信息,还可以持续为进一步分析图像提供基本数据,这样就不必再为应用增加2D相机。
因此,2D图像数据不仅可以作为纹理叠加在3D点云上来改进3D图像,而且还可以实现识别对象边缘以及在图像中读取代码等功能。通过这种方式,系统不仅可以实现对象的三维检测,方便机器人进行抓取,而且可以精确识别对象,从而进行精细处理。
VST Ensenso C系列现在专门配备了完全集成的RGB相机,因此还可以访问同一场景的2D彩色图像。这样就可以应对不仅需要3D点云还需要彩色图像的任务,扩展了相机的应用范围。例如,对于AI图像分析任务,彩色图像通常被用作基本数据,相机很适合这类任务。

VST Ensenso C 专门配备了一台集成2D彩色相机
为读取包裹代码等图像处理任务提供基本数据
紧凑且完全集成
如果一项应用需要使用和分析多个特征或基本数据,通常有两种实现方式:一种是,整个任务所需的所有传感器或组件都可以作为独立设备进行操作。这样做的优势是每个模块化单元的选择和维护非常灵活,缺点是在一个应用中集成和同步多个设备的技术要求高,需要更多专业知识。
另一种方式则是采用全新VST Ensenso C这类完全集成的设备,它们将所有组件封装在一个安全的封闭外壳中。也就是说,工厂会优化匹配立体相机、图案生成器、2D彩色相机和灯光,用户可以通过通用设备软件 VST Ensenso SDK 调整和访问系统。尽管应用越来越复杂,但这种3D相机系统非常紧凑,可以适应机器人和其他自主系统空间有限的状况。
远距离大视野3D传感器
对于目标距离长达5米的应用,3D相机系统的组件必须经过优化设计并能相互协同,从而获得深度值的高Z精度。在像 VST Ensenso C 这样的立体测量系统中,长基线(两个立体相机之间的距离)可以非常精确和稳定地对各目标点进行三角测量。相机还拥有5MP 高分辨率,可以非常详细地扫描对象结构。对于完整的点云,即使物体表面纹理少,只有几个突出像素,VST Ensenso C相机也可以依赖强大的 200W LED图案生成器,确保在5米的距离创造高对比度表面。此外,相机机械结构刚性强,散热经过优化设计,可以在很远距离仍然能保持深度值的低偏差特性(在1m的距离处偏差仅为0.1mm)。

VST Ensenso C 在200 W功率强大投影仪的支持下
将高对比度纹理投影到待成像对象上
实时3D点云图像展示
附加的RGB传感器生成纹理数据,使用颜色信息补充3D点云,从而确保逼真的3D展示。这使得在后续处理中更容易区分有色物体。
友思特3D相机-彩色点云示例
小结
VST Ensenso C 3D相机可以为应用提供高级图像处理功能所需的基本数据。随着VST Ensenso C推出,IDS在3D相机技术方面迈出重要一步。这款3D相机系统尽管外壳尺寸小巧,却集中了 VST Ensenso 在3D视觉环境中的所有优势,尤其适合对精度要求高的高端领域的大规模应用。VST Ensenso C系列的众多型号操作和调试都非常简单,成为三维图像处理的重要工具。
产品简介:VST Ensenso C 3D相机

产品方案特点
-
5m超长检测工作距离
-
高达0.1mm精度@1m
-
200w大功率投影仪
-
动静态场景下实时3D成像
-
内部集成2D RGB传感器捕获彩色图像
-
小巧紧凑坚固耐用
-
IP65/67工业级
一台相机 众多应用
检测和识别
移动物体的自动空间检测和抓取在许多应用中提高了生产力。高亮度投影仪还确保了单次拍摄图像的高图案对比度,从而生成用于对象处理的强大详细3D数据。

料箱取件
所应用的3D相机的功能影响机器人成功检测、拾取和放置零件的能力。Ensenso C通过集成RGB传感器扩展了这些功能,适合有颜色需求的应用。

(去)托盘化
任意包装箱和货物的自动码垛工作在物流应用中仍然是一个挑战。即使各种货物密密麻麻堆放在一起,且距离较远,Ensenso C也能够可靠检测物体的大小、旋转和实际位置。

测试和测量
在大体积应用中,从更远距离对物体质量参数进行非接触式测量和检查需要很高可再现3D分辨率。相机的长基线和强大的图案投影仪确保即使在5米的工作距离内也能以毫米精度实现出色特征识别。
相关文章:
高精度彩色3D相机:开启崭新的彩色3D成像时代
3D成像的新时代 近年来,机器人技术的快速发展促使对3D相机技术的需求不断增加,原因在于,相机在提高机器人的性能和实现多种功能方面发挥了决定性作用。然而,其中许多应用所需的解决方案更复杂,仅提供环境的深度信息是…...
借助Gitee将typora图片上传CSDN
概述 前面已经发了一个如何借助Github将typora上的图片上传到csdn上,但这有个缺陷:需要科学上网才能加速查看已经上传到github上的图片,否则就会出现已经上传的图片,无法正常查看的问题 如何解决? 那就可以使用Gite…...

几件奇怪的事产生的疑团
1.记得当年在中国科技大学杨照华给我们上初等数论课(杨是北大毕业,闵嗣鹤教授的关门弟子,后来到华南师大任教),他说过“据华老(华罗庚)讲,希尔伯特最先解决华林问题的论文中用到二十…...
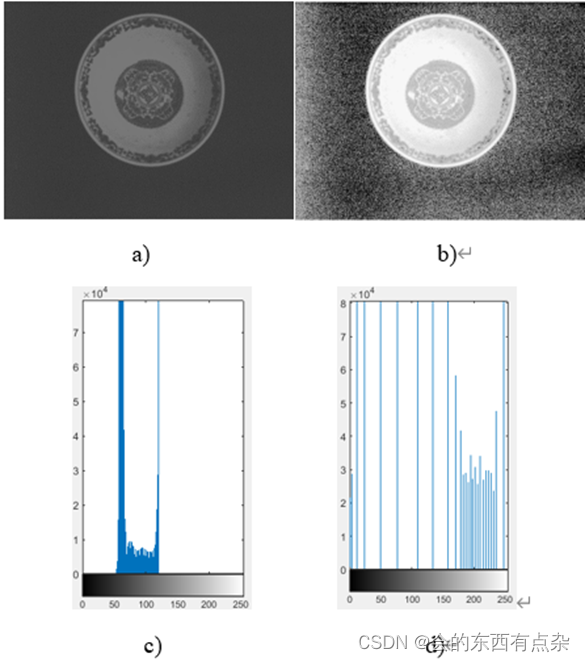
陶瓷碗口缺口检测-图像增强
图像增强 在采集图像的过程中,可能会有由于采集图像环境中光源照射不足,导致采集的图像对比度不足,图像视觉效果较暗的情况,可以通过直方图均衡化或者直方图规定化。如图a为原图像对比度低,图c为其直方图,…...

gitee创建远程仓库并克隆远程仓库到电脑
1、首先点加号新建一个仓库 2、输入仓库名,路径会自动填充,填写简单的仓库介绍,先选择私有,在仓库创建之后,可以改为开源 3、打开建好的仓库 4、复制仓库链接 5、打开一个文件夹(想要存储远程仓库的地址),在…...
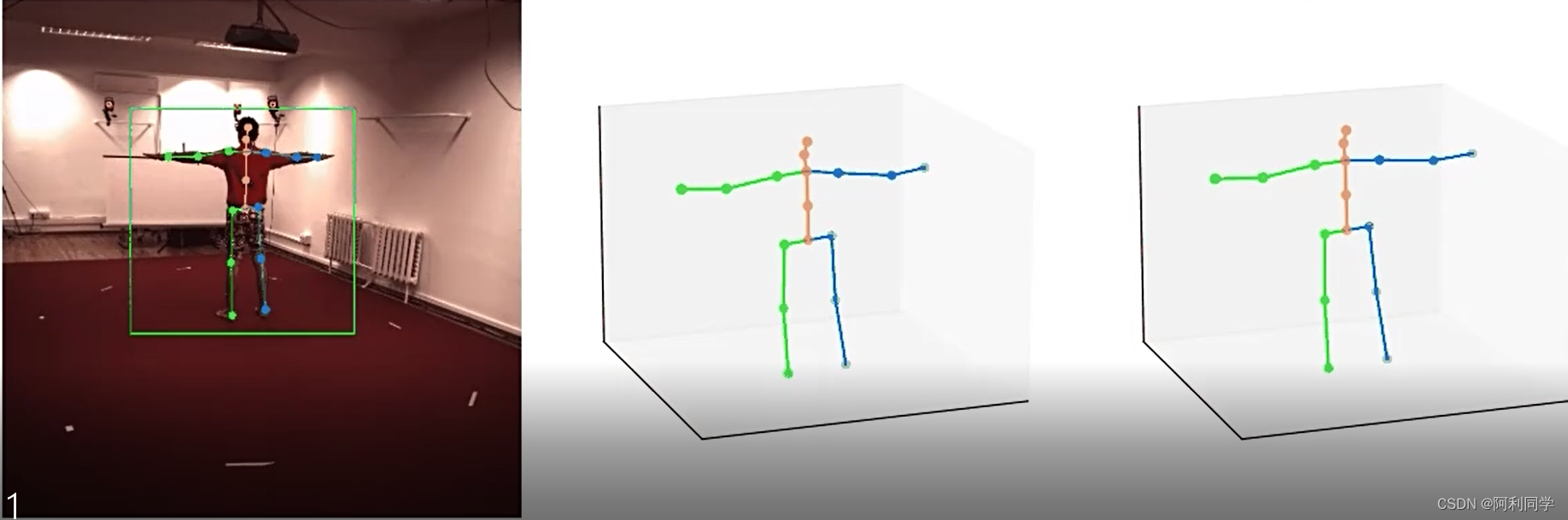
3D人体姿态估计(教程+代码)
3D人体姿态估计是指通过计算机视觉和深度学习技术,从图像或视频中推断出人体的三维姿态信息。它是计算机视觉领域的一个重要研究方向,具有广泛的应用潜力,如人机交互、运动分析、虚拟现实、增强现实等。 传统的2D人体姿态估计方法主要关注通…...
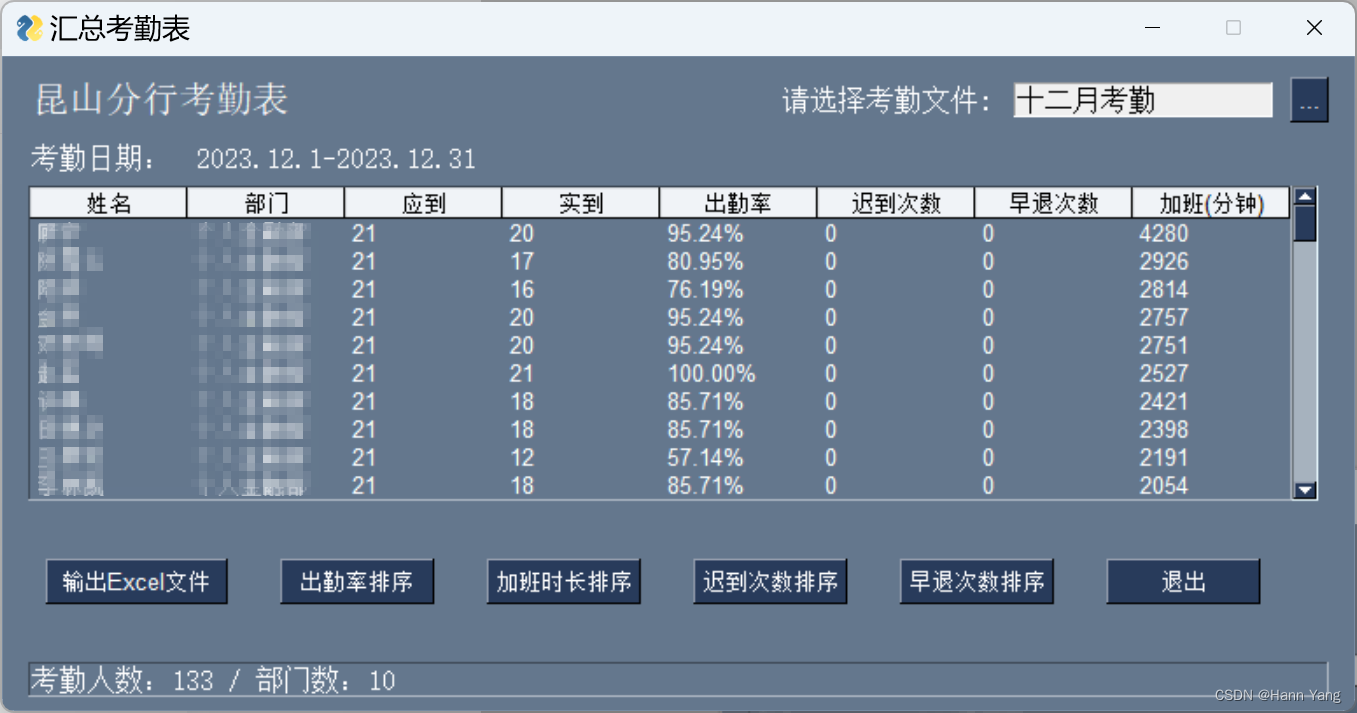
Python异步编程|PySimpleGUI界面读取PDF转换Excel
目录 实例要求 原始pdf文件格式 输出xls文件格式 运行界面 完整代码 代码分析 遍历表格 布局界面 控件简介 写入表格 表格排序 事件循环 异步编程 实例要求 使用PySimpleGUI做一个把单位考勤系统导出的pdf文件合并输出Excel的应用,故事出自࿱…...
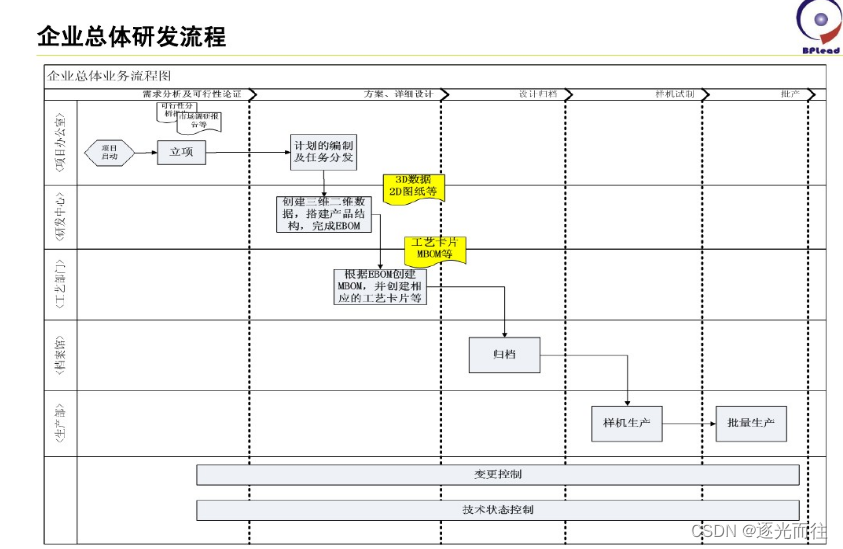
制造领域 基础概念快速入门介绍
1、基本背景知识 本定义结合国家标准文件有所发挥,仅供参考。 产品:是生产企业向用户或市场以商品形式提供的制成品; 成套设备:在生产企业一般不用装配工序连接,但用于完成相互联系的使用功能的两个或两个以上的产…...

小程序的完整开发流程?
小程序的完整开发流程可以分为以下几个步骤: 需求分析和设计:明确小程序的功能需求和设计思路,包括页面结构、交互逻辑等。 环境搭建:安装并配置开发工具,如微信开发者工具或其他小程序开发工具。 项目初始化&#x…...
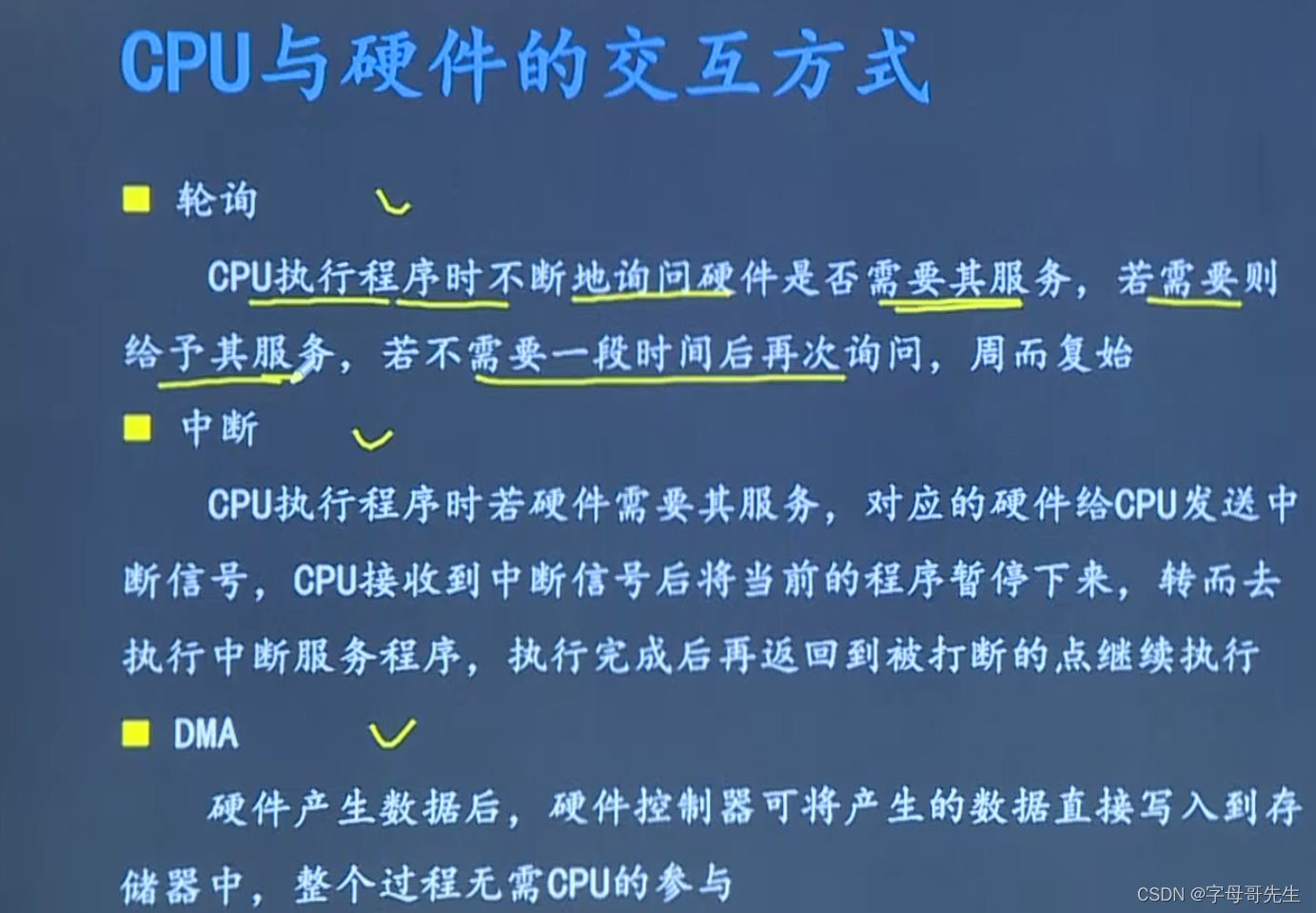
【LV13 DAY16 轮询与中断】
轮询实现按键实验 #include "exynos_4412.h"int main() {//GPX1_1设置为输入模式//GPX1.CONGPX1.CON & (~ (0XF<<4));while(1){if(!(GPX1.DAT&(1<<1))){printf("key pressed\n");while(!(GPX1.DAT&(1<<1)));}else{}}return…...

Swoft - Bean
一、Bean 在 Swoft 中,一个 Bean 就是一个类的一个对象实例。 它(Bean)是通过容器来存放和管理整个生命周期的。 最直观的感受就是省去了频繁new的过程,节省了资源的开销。 二、Bean的使用 1、创建Bean 在【gateway/app/Http/Controller】下新建一个名为…...

【产品人卫朋】硬件产品经理:从入门到精通
目录 本文目录 1. 前言说明 2. 内容说明 3. 资料包说明 作者简介 本文目录 1. 前言说明 2. 内容说明 3. 资料包说明 1. 前言说明 本篇内容节选自实体书《硬件产品经理:从入门到精通》。 2. 内容说明 鉴于硬件产品的特殊性,不同产品阶段的时间间…...
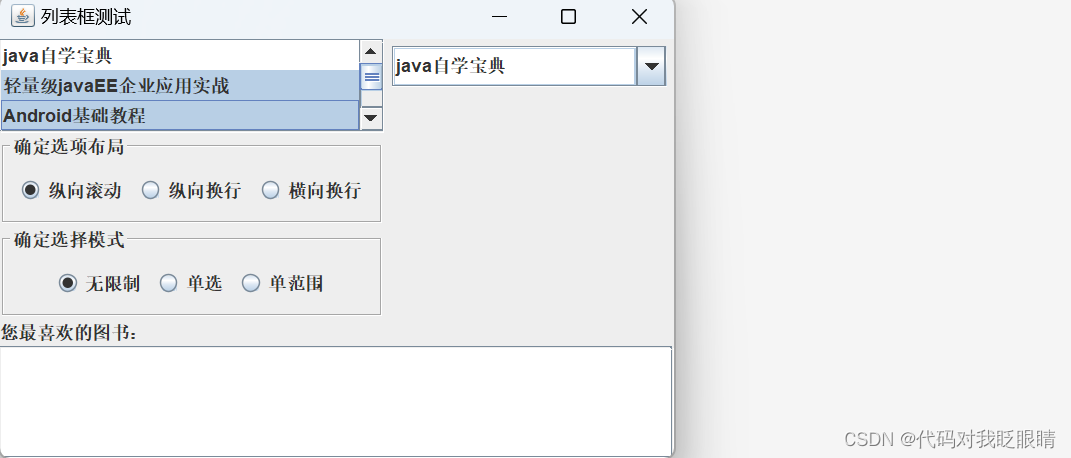
swing快速入门(四十)JList、JComboBox实现列表框
注释很详细,直接上代码 上一篇 新增内容 🧧1.列表的属性设置与选项监听器 🧧2.下拉框的属性设置与选项监听器 🧧3.Box中组件填充情况不符合预期的处理方法 🧧4.LIst向Vector的转化方法 源码: package swing…...
React Native 原生组件回调JS层方法和 JS 层调用原生组件的事件方法
一、原生组件回调 JS 层提供的事件方法 比如 TextInput 组件 onChangeText 属性,输入事件是发生在原生层的但是需要通知 JS 层发生了变化,并执行 JS 层的方法。 1、给原生组件添加一个按钮用于触发原生事件方法 在 XML 中添加一个按钮 为了方便让 Inf…...
Go-安装与基础语法
TOC 1. Go 安装与环境变量 1.1 下载 需要从Go语言的官方网站下载适合你操作系统的Go语言安装包。Go语言支持多种操作系统,包括Windows、Linux和Mac OS。 对于Windows用户,下载.msi文件,然后双击该文件,按照提示进行安装即可。…...
【同济子豪兄斯坦福CS224W中文精讲】NetworkX代码学习笔记
文章目录 安装配置创建图可视化图图数据挖掘参考资料 安装配置 matplotlib中文字体设置 import networkx as nx import matplotlib.pyplot as plt # 魔法指令,设置后在jupyter notebook中绘制的图形会显示在输出单元格中,而不是弹出一个新窗口 %matplo…...
java+ssm+vue代码视频学习讲解
一、ssm 1.项目文件结构 2.数据库连接信息 3.其他配置信息 4.java代码文件目录介绍 5.entity层代码 6.controller,service,dao,entity层之间的关系 7.controller层代码 8.登陆拦截功能实现 AuthorizationInterceptor.java 9.文件上传功能 …...
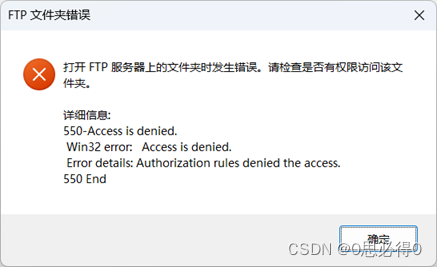
[计算机提升] 创建FTP共享
4.7 创建FTP共享 4.7.1 FTP介绍 在Windows系统中,FTP共享是一种用于在网络上进行文件传输的标准协议。它可以让用户通过FTP客户端程序访问并下载或上传文件,实现文件共享。 FTP共享的用途非常广泛,例如可以让多个用户共享文件、进行文件备份…...
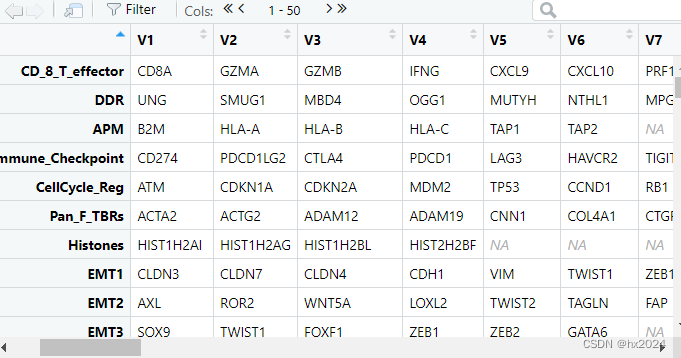
R语言将list转变为dataframe(常用)
在R语言使用中常常遇到list文件需要转变为dataframe格式文件处理。这是需要写循环来进行转换。IOBR查看其收录的相关基因集(自备)_iobr_deg-CSDN博客 示例文件 list文件: 循环转换为dataframe data <- signature_tme dat <- as.data.frame(t(sapply(data, …...
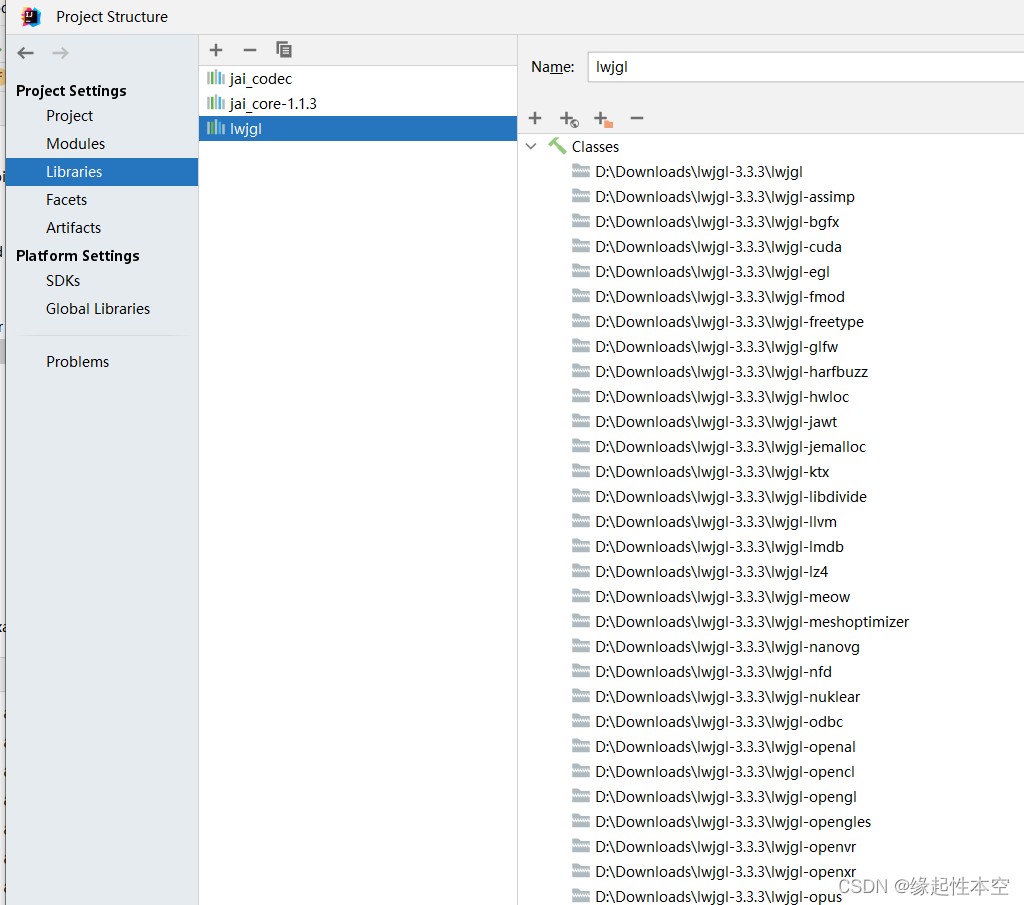
【JAVA】OPENGL+TIFF格式图片,不同阈值旋转效果
有些科学研究领域会用到一些TIFF格式图片,由于是多张图片相互渐变,看起来比较有意思: import java.io.IOException; import java.text.SimpleDateFormat; import java.util.Date; import java.util.logging.*;/*** 可以自已定义日志打印格式…...

如何高效解析HTML5动态表单:Gumbo-Parser完全指南
如何高效解析HTML5动态表单:Gumbo-Parser完全指南 【免费下载链接】gumbo-parser An HTML5 parsing library in pure C99 项目地址: https://gitcode.com/gh_mirrors/gum/gumbo-parser Gumbo-Parser是一款采用纯C99编写的HTML5解析库,它能够高效处…...

告别鼠标拖拽:用Mermaid重新定义技术图表创作流程
告别鼠标拖拽:用Mermaid重新定义技术图表创作流程 【免费下载链接】mermaid mermaid-js/mermaid: 是一个用于生成图表和流程图的 Markdown 渲染器,支持多种图表类型和丰富的样式。适合对 Markdown、图表和流程图以及想要使用 Markdown 绘制图表和流程图的…...

OpenClaw多任务测试:百川2-13B-4bits模型在并行处理中的显存管理
OpenClaw多任务测试:百川2-13B-4bits模型在并行处理中的显存管理 1. 测试背景与动机 上周在调试一个自动化工作流时,遇到了一个典型问题:当OpenClaw同时处理文件格式转换、网页信息抓取和邮件发送任务时,后台的百川2-13B模型频繁…...

OpenClaw+GLM-4.7-Flash隐私方案:本地化处理敏感数据
OpenClawGLM-4.7-Flash隐私方案:本地化处理敏感数据 1. 为什么需要本地化隐私方案 去年我在帮一家诊所设计病历管理系统时,遇到了一个棘手问题:他们需要自动化处理患者检查报告,但又担心将敏感数据上传到云端存在泄露风险。这促…...
)
零代码玩转珞石机械臂:用图形化编程实现咖啡拉花全流程(附配置文件)
零代码玩转珞石机械臂:用图形化编程实现咖啡拉花全流程(附配置文件) 在精品咖啡文化蓬勃发展的今天,一杯带有精美拉花的拿铁不仅能提升产品附加值,更能为顾客创造独特的消费体验。但对于大多数独立咖啡店主而言&#…...

OWL ADVENTURE快速上手:10分钟完成本地部署与第一个识别Demo
OWL ADVENTURE快速上手:10分钟完成本地部署与第一个识别Demo 你是不是也对那些能看懂图片、能回答图片问题的AI模型感到好奇?OWL ADVENTURE就是这样一个模型,它能理解图片里的内容,然后和你聊天。听起来很酷,但会不会…...

PyTorch 2.5快速部署指南:3步开启你的AI模型训练之旅
PyTorch 2.5快速部署指南:3步开启你的AI模型训练之旅 1. PyTorch 2.5环境准备 PyTorch 2.5作为当前最流行的深度学习框架之一,带来了多项性能优化和新特性。在开始之前,我们需要确保环境配置正确。 1.1 系统要求检查 操作系统:…...

ABAP开发避坑指南:绕过SAP GUI安全弹窗的5种编程方案实测
ABAP开发实战:5种绕过SAP GUI安全弹窗的编程方案深度解析 引言:SAP GUI安全机制的困境与突破 在SAP系统的日常开发与运维中,频繁出现的"系统试图创建文件"安全弹窗堪称ABAP开发者的噩梦。这种设计初衷为保护本地文件安全的机制&…...

霞鹜文楷GB:为什么选择这款免费开源的中文国标字体?
霞鹜文楷GB:为什么选择这款免费开源的中文国标字体? 【免费下载链接】LxgwWenkaiGB An open-source Simplified Chinese font derived from Klee One. 项目地址: https://gitcode.com/gh_mirrors/lx/LxgwWenkaiGB 霞鹜文楷GB是一款基于日本Klee O…...

SecGPT-14B部署教程:适配国产昇腾910B的vLLM分支编译与性能调优
SecGPT-14B部署教程:适配国产昇腾910B的vLLM分支编译与性能调优 1. SecGPT-14B简介 SecGPT是由云起无垠推出的开源大语言模型,专注于网络安全领域。该模型融合了自然语言理解、代码生成和安全知识推理等能力,旨在为安全专业人员提供智能辅助…...