机器人技能学习-robosuite-0-入门介绍
文章目录
- 前言
- 模块介绍
- 实战
- 案例1:从 `demo` 中创建自己的 `env`
- 案例2:更换属于自己的物体
前言
资料太少、资料太少、资料太少,重要的事说三边,想根据自己实际场景自定义下机器人,结果发现无路可走,鉴于缺少参考文献,现在这里记录下,主要内容为官网信息,如有不合适的地方,望留言
模块介绍
结构很清晰,就是不会,以下是整体的框架图:
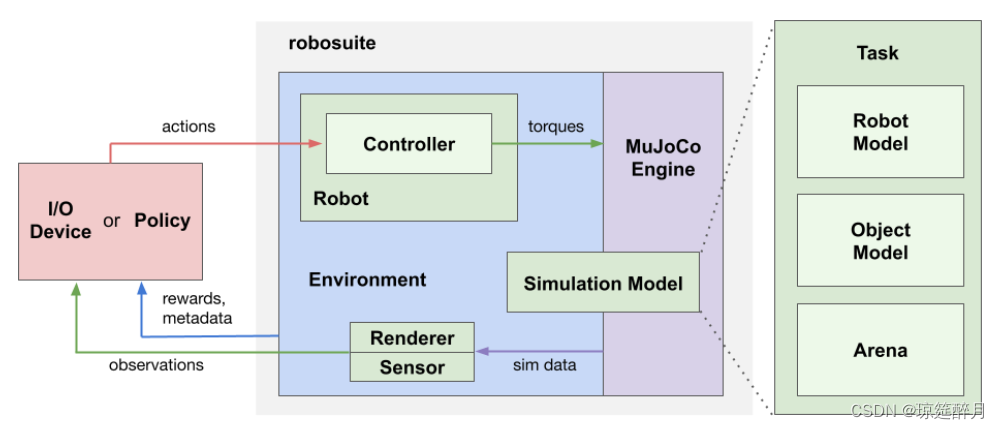
仿真模型三要素
| 要素 | 数量 | 解释 | 备注 |
|---|---|---|---|
| 机器人模型 | 一个或多个 | 包含夹具及机器人上的附属物 | |
| 物体模型 | 0个或多个 | 能操作的目标物 | |
| Arena | 有且仅有一个 | 机器人工作场景,包含桌子等 |
关键组件解释:
| 组件 | 作用 | 备注 |
|---|---|---|
| Robots | 实际动作者 | |
| Controls | 解析相关指令转换成低层次语言传给物理引擎 | 会影响robot的运动学分量 |
| Sensors | 从MjSim对象中检索信息,并将观测结果生成机器人接受的物理信号 |
实战
案例1:从 demo 中创建自己的 env
目的:将系统案例中的 Lift 剥离出来,形成自己的环境 MyLiftEnv,并能在 ALL_ENVIRONMENTS 中找到该场景类。
- 将系统中的
Lift.py复制到robosuite_learn/demos/envs/MyLIftEnv.py,从此,MyLiftEnv场景就是专属自己的,可以在里面尽情更改; - 修改
robosuite/robosuite/__init__.py,添加代码:
import sys
sys.path.append("robosuite_learn/demos/envs/") # Manipulation environments
from robosuite.environments.manipulation.lift import Lift
# from robosuite.environments.manipulation.myEnv import MyEnv
from MyLiftEnv import MyLiftEnv
- 在
main函数中更改引入的环境名,即可调用
options["env_name"] = 'MyLiftEnv' # 'MyLiftEnv' # choose_environment()robots_index = ['UR5e'] # ['Sawyer', 'Panda', 'Jaco','Kinova3','IIWA','UR5e']options["robots"] = robots_index[i] # choose_robots(exclude_bimanual=True)# Choose controllercontroller_name = 'OSC_POSE' # choose_controller()# Load the desired controlleroptions["controller_configs"] = load_controller_config(default_controller=controller_name)# initialize the taskenv = suite.make(**options,has_renderer=True,has_offscreen_renderer=False,ignore_done=True,use_camera_obs=False,control_freq=20,)env.reset()env.viewer.set_camera(camera_id=0)
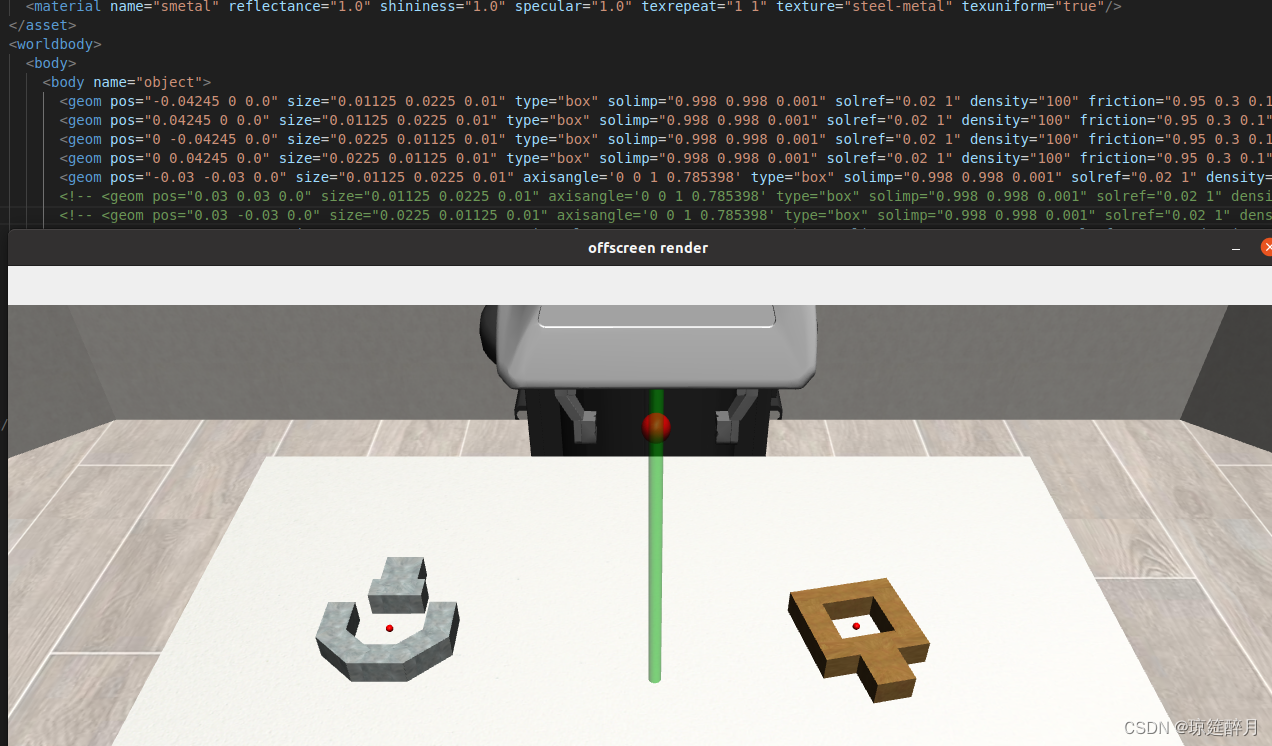
案例2:更换属于自己的物体
描述:将物体改成自己的数据,并手动控制机器人实现装配工作
物体描述:
<mujoco model="refrigerator-box"><asset><texture file="../textures/blue-wood.png" type="cube" name="steel-metal"/><material name="smetal" reflectance="1.0" shininess="1.0" specular="1.0" texrepeat="1 1" texture="steel-metal" texuniform="true"/></asset><worldbody><body><body name="object"><geom pos=" 0.02 0 0.0" size="0.002 0.04 0.04" type="box" solimp="0.998 0.998 0.001" solref="0.02 1" density="100" friction="0.95 0.3 0.1" group="0" condim="4" material="smetal" /><geom pos="-0.02 0 0.0" size="0.002 0.04 0.04" type="box" solimp="0.998 0.998 0.001" solref="0.02 1" density="100" friction="0.95 0.3 0.1" group="0" condim="4" material="smetal" /><geom pos="0 -0.04 0.0" size="0.02 0.002 0.04" type="box" solimp="0.998 0.998 0.001" solref="0.02 1" density="100" friction="0.95 0.3 0.1" group="0" condim="4" material="smetal" /><geom pos="0 0.04 0.0" size="0.02 0.002 0.04" type="box" solimp="0.998 0.998 0.001" solref="0.02 1" density="100" friction="0.95 0.3 0.1" group="0" condim="4" material="smetal" /><geom pos="0 0 -0.0399" size="0.02 0.04 0.002" type="box" solimp="0.998 0.998 0.001" solref="0.02 1" density="100" friction="0.95 0.3 0.1" group="0" condim="4" material="smetal" /></body><site rgba="0 0 0 0" size="0.005" pos="0 0 -0.1105" name="bottom_site"/><site rgba="0 0 0 0" size="0.005" pos="0 0 0.1105" name="top_site"/><site rgba="0 0 0 0" size="0.005" pos="0.0865 0.1005 0" name="horizontal_radius_site"/></body></worldbody>
</mujoco><mujoco model="refrigerator-drawer"><asset><mesh file="meshes/refrigerator-drawer.STL" name="refrigerator-drawer" scale="0.0012 0.0012 0.0012"/><!-- <mesh file="meshes/refrigerator-box.STL" name="refrigerator-box" scale="0.002 0.002 0.002"/> --></asset><worldbody><body><body name="object"><geom pos="0.0 -0.1 0.01" mesh="refrigerator-drawer" type="mesh" solimp="0.998 0.998 0.001" solref="0.001 1" density="1000" friction="0.95 0.3 0.1" group="0" condim="4" rgba="0.13 0.13 0.13 1"/><!-- <geom pos="0.0 0.1 0.01" mesh="refrigerator-box" type="mesh" solimp="0.998 0.998 0.001" solref="0.001 1" density="1000" friction="0.95 0.3 0.1" group="0" condim="4" rgba="0.13 0.13 0.13 1"/> --></body><site rgba="0 0 0 0" size="0.005" pos="0 0 -0.1105" name="bottom_site"/><site rgba="0 0 0 0" size="0.005" pos="0 0 0.1105" name="top_site"/><site rgba="0 0 0 0" size="0.005" pos="0.0865 0.1005 0" name="horizontal_radius_site"/></body></worldbody>
</mujoco>
同时在场景中,也把当前的物体导入即可。
效果展示如下图:


BUG1:曾经出现的问题
在进行手动装配的时候,出现drawer 无法塞入box 的空间中的现象,如下图所示,初步怀疑,对于 box 的描述不充分,导致无法体现空洞的表征;

问题探讨,从官方提供的demo 数据中找到一个类似的场景,把其中一个件插入到另外一个件中:

于是,找到相关 xml 模型,并进行交叉测试:

相关文章:
机器人技能学习-robosuite-0-入门介绍
文章目录 前言模块介绍实战案例1:从 demo 中创建自己的 env案例2:更换属于自己的物体 前言 资料太少、资料太少、资料太少,重要的事说三边,想根据自己实际场景自定义下机器人,结果发现无路可走,鉴于缺少参…...

【工具】tmux简单用法
tmux 是一个终端复用工具,允许你在单个终端窗口中运行多个终端会话,并在它们之间切换。它提供了分割窗格、多窗口和会话管理等功能,使得在终端中更加高效地工作。 以下是一些 tmux 的基本概念和简单应用: 会话 (Session): 一个 t…...

使用 C++/WinRT 的错误处理
本主题讨论了处理使用 C/WinRT 编程时出现的错误的策略。 更多常规信息和背景,请参阅错误和异常处理 (Modern C)。 避免捕获和抛出异常 建议继续编写异常安全代码,但最好尽量避免捕获和抛出异常。 如果没有异常处理程序,Windows 将自动生成错…...
Windows 7 介绍)
计算机基础专升本笔记九-Windows7基础(一)Windows 7 介绍
计算机基础专升本笔记九-Windows7基础 一、Windows简介 Microsoft公司从1983年开始研制Windows系统,最初的研制目标是在MS-DOS的基础上提供一个多任务的图形用户界面。 1985年,第一个版本的Windows 1.0问世,它是一个具有图形用户界面的系…...

LeetCode1109. Corporate Flight Bookings
文章目录 一、题目二、题解 一、题目 There are n flights that are labeled from 1 to n. You are given an array of flight bookings bookings, where bookings[i] [firsti, lasti, seatsi] represents a booking for flights firsti through lasti (inclusive) with sea…...

视觉SLAM十四讲|【五】相机与IMU时间戳同步
视觉SLAM十四讲|【五】相机与IMU时间戳同步 相机成像方程 Z [ u v 1 ] [ f x 0 c x 0 f y c y 0 0 1 ] [ X Y Z ] K P Z \begin{bmatrix} u \\ v \\ 1 \end{bmatrix} \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix} \…...

js null和undefined的区别
null和undefined在JavaScript中都表示“无”的概念,但它们在使用和含义上有一些重要的区别。 含义: null 是一个表示“无”的对象,当转换为数值时结果为0。 undefined 是一个表示“缺少值”的原始值,当转换为数值时结果为NaN。…...

Arduino| IDE下载、安装和设置以及开发板的连接
IDE下载、安装和设置以及开发板的连接 IDE下载IDE安装IDE设置首选项——设置语言、字体、主题、地址等等开发板管理器——添加开发板 开发板的连接 IDE下载 第一步:进入Arduino官网https://www.arduino.cc。 第二步:选择导航栏的Software,然…...
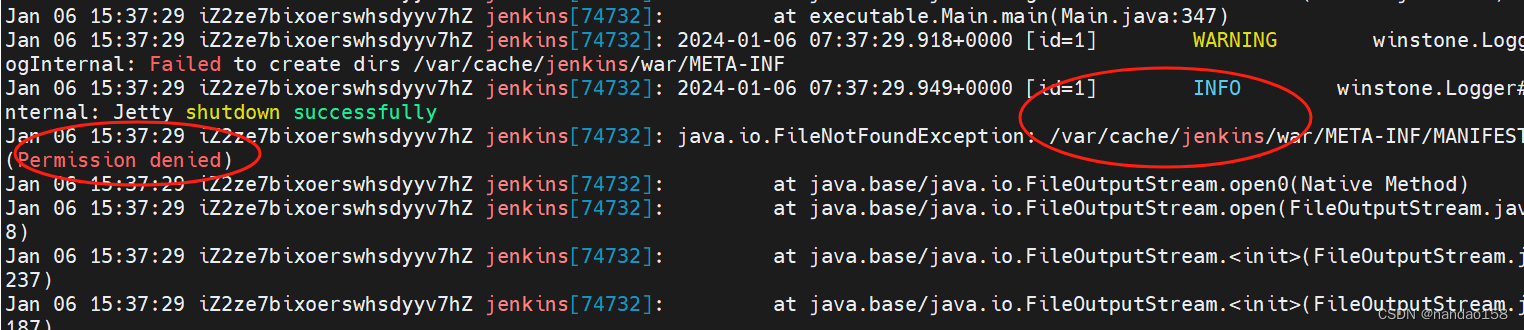
Linux之Ubuntu环境Jenkins部署前端项目
今天分享Ubuntu环境Jenkins部署前端vue项目 一、插件安装 1、前端项目依赖nodejs,需要安装相关插件 点击插件管理,输入node模糊查询 选择NodeJS安装 安装成功 2、配置nodejs 点击后进入 点击新增 NodeJS 配置脚手架类型:如果不填 默认npm …...

QT下的几种实现modbus的库,记录
QModbus QT提供了一个名为QModbus的模块,可以实现Modbus的主机或从机功能 pro需要添加 QT += serialbus serialport相关头文件 #include <QModbusTcpClient> #include <QModbusDataUnit> 具体使用参考: https://blog.csdn.net/XCJandLL/article/details/1…...
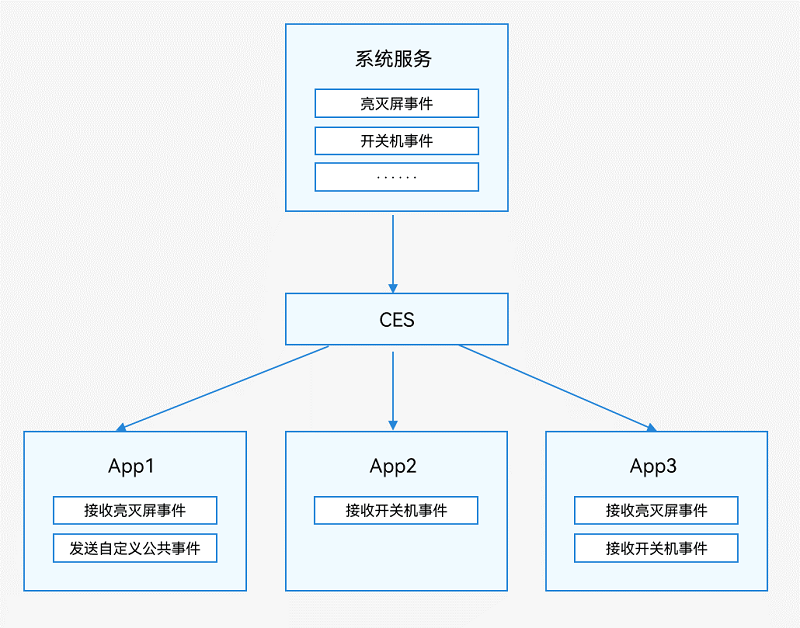
HarmonyOS4.0系统性深入开发18公共事件简介
公共事件简介 HarmonyOS通过CES(Common Event Service,公共事件服务)为应用程序提供订阅、发布、退订公共事件的能力。 公共事件从系统角度可分为:系统公共事件和自定义公共事件。 系统公共事件:CES内部定义的公共事…...
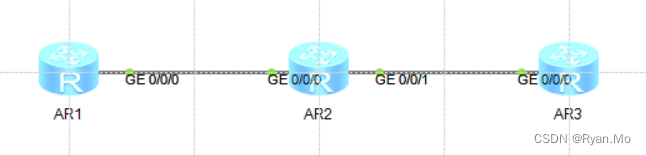
华为路由器OSPF动态链路路由协议配置
R1配置 interface GigabitEthernet0/0/0ip address 10.1.12.1 255.255.255.252 interface LoopBack0ip address 1.1.1.1 255.255.255.255 ospf 1 router-id 1.1.1.1 area 0.0.0.0 network 1.1.1.1 0.0.0.0 network 10.1.12.0 0.0.0.3 R2配置 interface GigabitEthernet0/0/0i…...
常用注解/代码解释(仅个人使用)
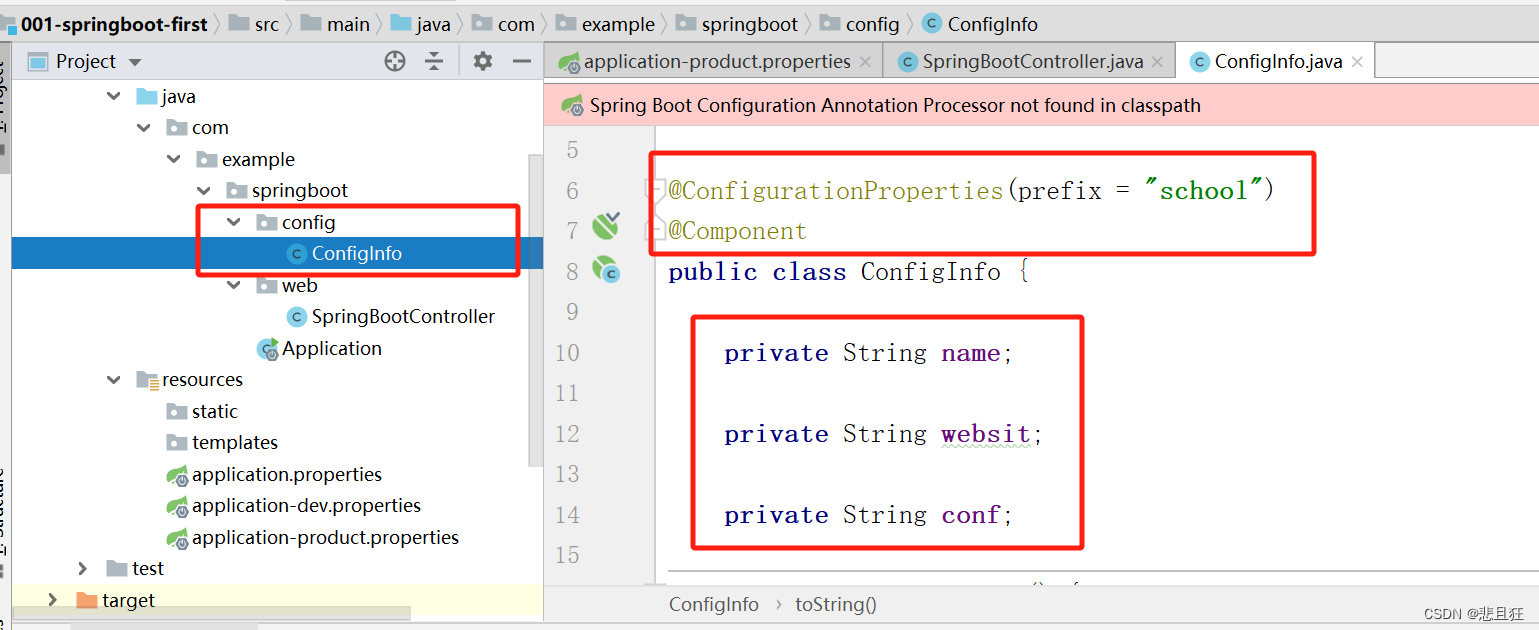
目录 第一章、代码解释①trim() 方法以及(Arrays.asList(str.split(reg)));②查询字典项②构建后端镜像shell命令解释 第二章、注解解释①PropertySource注解与Configurationproperties注解的区别 第三章、小知识①Linux系统中使用$符号表示变量 友情提醒: 先看文章目录&#…...

2024阿里云服务器ECS介绍_全方位解析_CPU性能详解
阿里云服务器ECS英文全程Elastic Compute Service,云服务器ECS是一种安全可靠、弹性可伸缩的云计算服务,阿里云提供多种云服务器ECS实例规格,如经济型e实例、通用算力型u1、ECS计算型c7、通用型g7、GPU实例等,阿里云百科aliyunbai…...

向伟人学习反焦虑,在逆境中崛起
第一、乐观的精神。 伟人在长期以来的读书、思考和实践,突破了思想认知限制,并最终在更高的思维层面上,建立起了强大的精神信念感。 在危险环境中表示绝望的人, 在黑暗中看不见光明的人, 只是懦夫与机会主义者。 —— …...
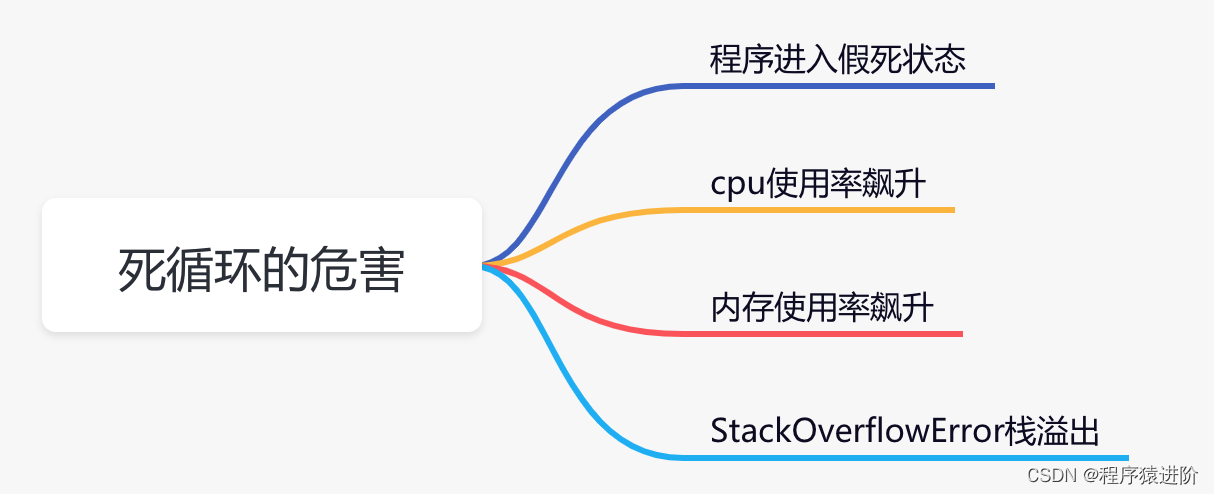
线上问题整理
JVM 案例 案例一:服务器内存不足,影响Java应用 问题: 收到报警,某Java应用集群中一台服务器可用内存不足,超过报警阈值。 排查过程: 首先,通过Hickwall查看该应用各项指标,发现无论…...

【elastic search】详解elastic search集群
目录 1.与集群有关的一些概念 2.集群搭建 3.集群搭建 4.kibana链接集群 5.选举流程 6.请求流程 7.master的作用 1.与集群有关的一些概念 数据分片: 数据分片(shard),单台服务器的存储容量是有限的,把一份数据…...
近红外光谱分析技术与基于深度学习的化学计量学方法
郁磊【副教授】:主要从事AI人工智能与大数据分析等相关研究,长期致力于人工智能与近红外生物医学工程等领域融合,主持并完成多项科研课题。著有《神经网络43个案例分析》等书籍。 // 讲座内容 1、近红外光谱基本理论、近红外光谱仪基本原理…...
Elasticsearch windows开箱即用【记录】
一、准备工作 安装ES之前要在本机安装好JDK,对应的兼容性见官网链接:https://www.elastic.co/cn/support/matrix ES官网链接:https://www.elastic.co/cn/, 我本机安装的是JDK8,测试使用的是7.3.0版本的ES和Kibana。 1、首先去…...

第 3 课 ROS 常用术语及命令说明
1.ROS文件系统的组成 ROS 文件是由 Packages 和 Manifests ( package.xml )组成。 Packages:功能包,是 ROS 软件中的基本单元,包含节点源码、配置文件、数据定义等。 Manifest( package xml &#x…...

如何轻松备份微信聊天记录:iOS用户的终极解决方案
如何轻松备份微信聊天记录:iOS用户的终极解决方案 【免费下载链接】WeChatExporter 一个可以快速导出、查看你的微信聊天记录的工具 项目地址: https://gitcode.com/gh_mirrors/wec/WeChatExporter 你是否曾经因为手机损坏或更换设备而丢失了珍贵的微信聊天记…...
)
基于Javaweb的医院在线挂号系统(10007)
有需要的同学,源代码和配套文档领取,加文章最下方的名片哦 一、项目演示 项目演示视频 二、资料介绍 完整源代码(前后端源代码SQL脚本)配套文档(LWPPT开题报告/任务书)远程调试控屏包运行一键启动项目&…...
TrguiNG汉化版:三招彻底改变你的Transmission远程管理体验
TrguiNG汉化版:三招彻底改变你的Transmission远程管理体验 【免费下载链接】TrguiNG Transmission WebUI 基于 openscopeproject/TrguiNG 汉化和改进 项目地址: https://gitcode.com/gh_mirrors/tr/TrguiNG 你是否还在忍受Transmission原生的简陋Web界面&…...

3步快速上手:用dupeGuru轻松清理重复文件,释放宝贵磁盘空间
3步快速上手:用dupeGuru轻松清理重复文件,释放宝贵磁盘空间 【免费下载链接】dupeguru Find duplicate files 项目地址: https://gitcode.com/gh_mirrors/du/dupeguru 你是否经常为电脑中堆积如山的重复文件而烦恼?照片、文档、音乐文…...

拒绝无效熬夜!Paperxie 本科论文智能写作,把毕业季还给你
paperxie-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPThttps://www.paperxie.cn/ai/dissertationhttps://www.paperxie.cn/ai/dissertation 凌晨三点的图书馆,光标在空白文档里闪了又闪,Word 字数统计停在 478;导师的修…...

Eclipse框架:插件化架构与开发工具深度解析
1. Eclipse框架的起源与演进Eclipse最初由IBM及其子公司Object Technology International(OTI)在1999年启动开发,初衷是为WebSphere产品线提供更好的应用开发支持。这个完全用Java编写的平台,最初投入了40名开发人员和超过4000万美…...

【CTF实战】从黑名单绕过到.htaccess:一次完整的文件上传漏洞利用剖析
1. 从文件上传失败开始的CTF挑战 第一次打开这个CTF靶机时,我遇到了一个让人哭笑不得的情况:上传一个完全正常的图片文件居然失败了。这就像你去餐厅点餐,服务员告诉你"我们这里不卖食物"一样荒谬。但正是这种反直觉的现象…...

使用Taotoken后API调用延迟稳定在可接受范围且账单清晰可见
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用Taotoken后API调用延迟稳定在可接受范围且账单清晰可见 1. 引言 对于需要集成大模型能力的开发者而言,除了模型效…...

Doramagic:AI助手开源项目专家技能提取引擎架构与实战
1. 项目概述:Doramagic,一个为AI助手注入项目“灵魂”的提取引擎如果你和我一样,每天都在和各种各样的开源项目打交道,从FastAPI到Home Assistant,从Next.js到LangChain,那你肯定也遇到过这样的困境&#x…...

收藏必备!小白程序员轻松入门大模型:RAG架构详解与实践
本文详细介绍了检索增强生成(RAG)架构,旨在帮助初学者理解大模型如何结合外部知识库提升回答的准确性和时效性。文章涵盖了RAG的四种架构类型、黑盒与白盒增强策略、知识库构建、查询与检索增强方法,以及系统评估和优化增强过程。…...