去除GIT某个时间之前的提交日志
背景
有时git提交了太多有些较早之前的提交日志,不想在git log看到,想把他删除掉。
方法
大概思路是通过 git clone --depth 来克隆到指定提交的代码,此时再早之前的日志是没有的
然后提交到新仓库
#!/bin/bash
ori_git="git@your.git.path/ori-prj.git" #源仓库
ori_branch="master"
ori_path="ori-prj"dest_git="git@your.git.path/dest-prj.git" #需要提交到变更后的仓库
dest_branch="master"
dest_path="dest-prj"
previous_commit="41059bbcc349de4faccf484326a94d3c816cdd05" #从哪个id开始拉,不包含当前idif [ -d "$ori_path" ]; thenecho "$ori_path exist"
elseecho "git clone $ori_git --branch=$ori_branch $dest_path"git clone $ori_git --branch=$ori_branch $ori_path
ficd $ori_path
git pull
#判断分支是否存在, 没有的话拉一下
if test -z "$(git branch |grep $ori_branch)"; thengit checkout remotes/origin/$ori_branch -b $ori_branch
fi
git checkout $ori_branch# 获取id对应的深度
current_commit=$(git rev-parse HEAD)
commit_count=$(git log --oneline $previous_commit..$current_commit | wc -l)echo $commit_countcd ..
#只克隆到指定id的提交记录
rm -rf $dest_path
git clone $ori_git --depth=$commit_count --branch=$ori_branch $dest_path
cd $dest_path
git filter-branch -- --all # 要执行下这命令,不然推不上去
git remote rename origin old-origin
git remote add origin $dest_git
git push origin $ori_branch:$dest_branch --force
echo $ori_branch:$dest_branch
cd ..相关文章:

去除GIT某个时间之前的提交日志
背景 有时git提交了太多有些较早之前的提交日志,不想在git log看到,想把他删除掉。 方法 大概思路是通过 git clone --depth 来克隆到指定提交的代码,此时再早之前的日志是没有的 然后提交到新仓库 #!/bin/bash ori_git"gityour.gi…...

4 python快速上手
计算机常识知识 1.Python代码运行方式2.进制2.1 进制转换 3. 计算机中的单位4.编码4.1 ascii编码4.2 gb-2312编码4.3 unicode4.4 utf-8编码4.5 Python相关的编码 总结 各位小伙伴想要博客相关资料的话关注公众号:chuanyeTry即可领取相关资料! 1.Python代…...

单元测试-spring-boot-starter-test+junit5
前言: 开发过程中经常需要写单元测试,记录一下单元测试spring-boot-starter-testjunit5的使用 引入内容: 引用jar包 <!-- SpringBoot测试类依赖 --> <dependency><groupId>org.springframework.boot</groupId><…...
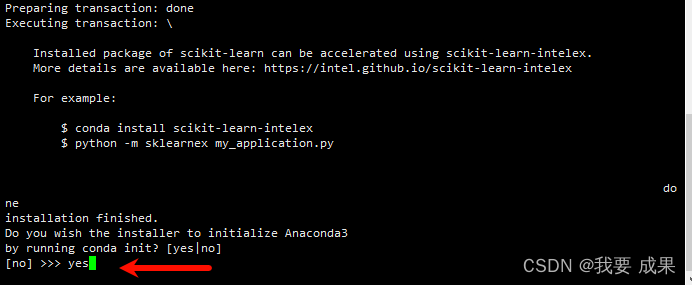
CentOS 7上安装Anaconda 详细教程
目录 1. 下载Anaconda安装脚本2. 校验数据完整性(可选)3. 运行安装脚本4. 遵循安装指南5. 选择安装位置6. 初始化Anaconda7. 激活安装8. 测试安装9. 更新Anaconda10. 使用Anaconda 1. 下载Anaconda安装脚本 首先需要从Anaconda的官方网站下载最新的Anac…...

2023年全球软件架构师峰会(ArchSummit深圳站):核心内容与学习收获(附大会核心PPT下载)
本次峰会是一次重要的技术盛会,旨在为全球软件架构师提供一个交流和学习的平台。本次峰会聚焦于软件架构的最新趋势、最佳实践和技术创新,吸引了来自世界各地的软件架构师、技术专家和企业领袖。 在峰会中,与会者可以了解到数字化、AIGC、To…...

RT-Thread Studio学习(十六)定时器计数
RT-Thread Studio学习(十六)定时器计数 一、简介二、新建RT-Thread项目并使用外部时钟三、启用PWM输入捕获功能四、测试 一、简介 本文将基于STM32F407VET芯片介绍如何在RT-Thread Studio开发环境下使用定时器对输入脉冲进行计数。 硬件及开发环境如下…...
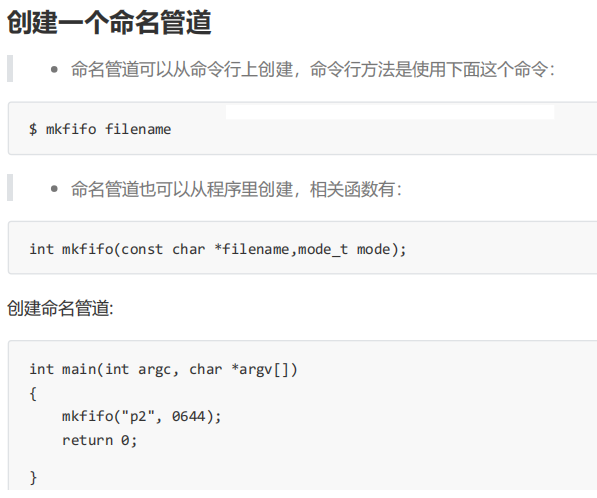
【linux进程间通信(一)】匿名管道和命名管道
💓博主CSDN主页:杭电码农-NEO💓 ⏩专栏分类:Linux从入门到精通⏪ 🚚代码仓库:NEO的学习日记🚚 🌹关注我🫵带你学更多操作系统知识 🔝🔝 进程间通信 1. 前言2. 进程间…...

第11章 jQuery
学习目标 了解什么是jQuery,能够说出jQuery的特点 掌握jQuery的下载和引入,能够下载jQuery并且能够使用两种方式引入jQuery 掌握jQuery的简单使用,能够使用jQuery实现简单的页面效果 熟悉什么是jQuery对象,能够说出jQuery对象与DOM对象的区别 掌握利用选择器获取元素的方法…...

leetcode:1736. 替换隐藏数字得到的最晚时间(python3解法)
难度:简单 给你一个字符串 time ,格式为 hh:mm(小时:分钟),其中某几位数字被隐藏(用 ? 表示)。 有效的时间为 00:00 到 23:59 之间的所有时间,包括 00:00 和 23:59 。 …...
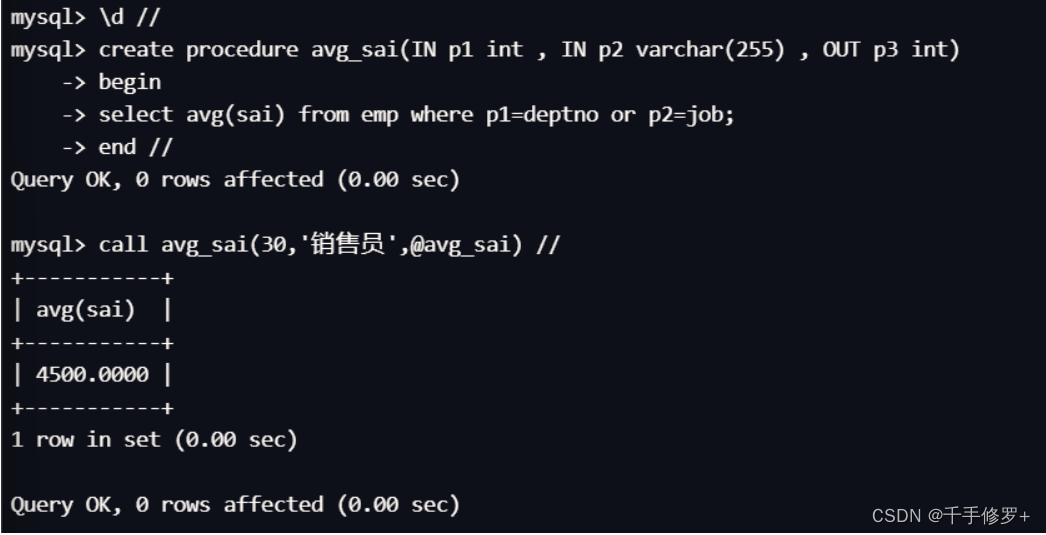
MySQL存储函数与存储过程习题
创建表并插入数据: 字段名 数据类型 主键 外键 非空 唯一 自增 id INT 是 否 是 是 否 name VARCHAR(50) 否 否 是 否 否 glass VARCHAR(50) 否 否 是 否 否 sch 表内容 id name glass 1 xiaommg glass 1 2 xiaojun glass 2 1、创建一个可以统计表格内记录…...
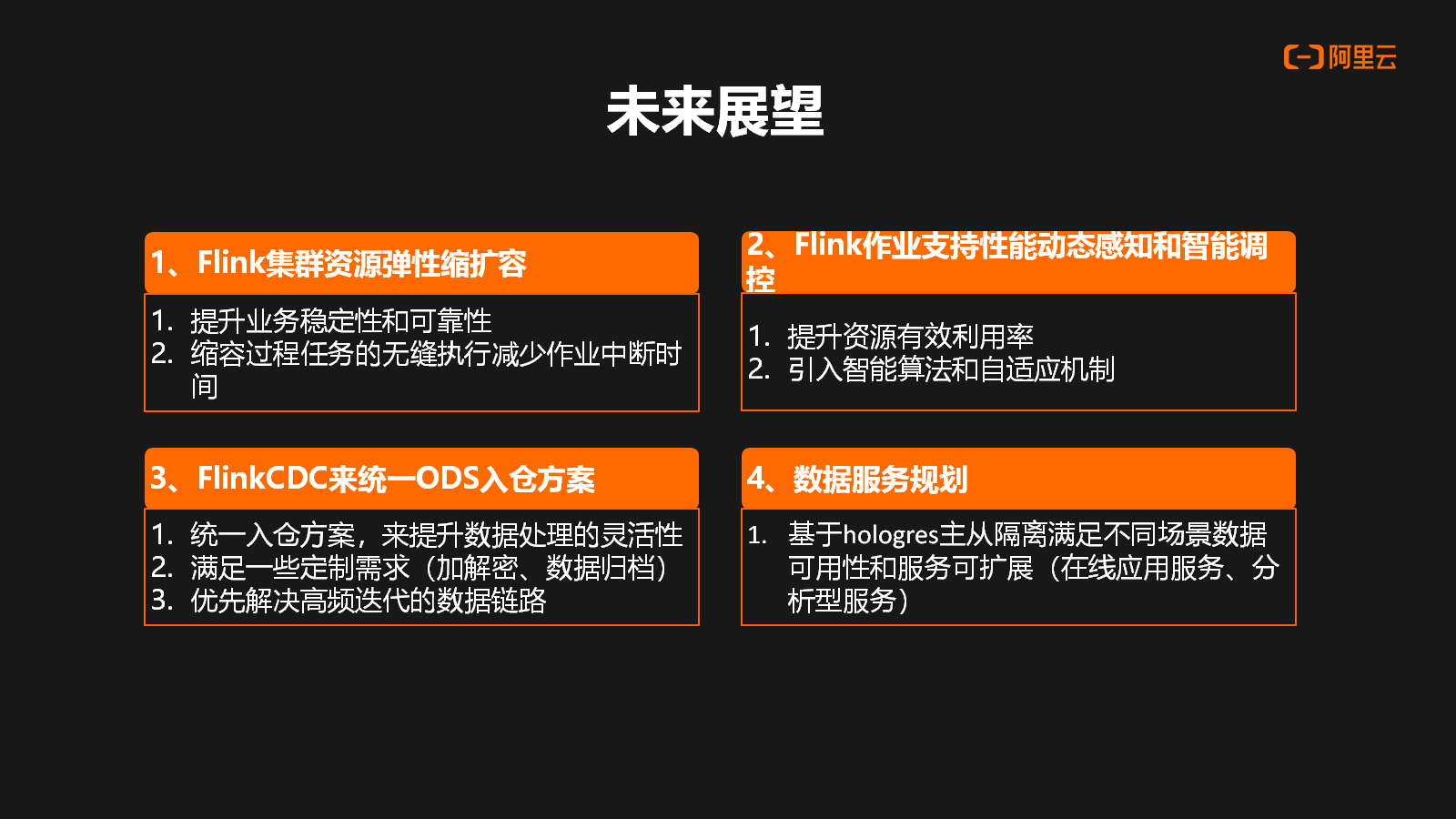
基于 Hologres+Flink 的曹操出行实时数仓建设
本文整理自曹操出行实时计算负责人林震基于 HologresFlink 的曹操出行实时数仓建设的分享,内容主要分为以下六部分: 曹操出行业务背景介绍曹操出行业务痛点分析HologresFlink 构建企业级实时数仓曹操出行实时数仓实践曹操出行业务成果分析未来展望 一、曹…...

【Docker】实战多阶段构建 Laravel 镜像
作者主页: 正函数的个人主页 文章收录专栏: Docker 欢迎大家点赞 👍 收藏 ⭐ 加关注哦! 本节适用于 PHP 开发者阅读。Laravel 基于 8.x 版本,各个版本的文件结构可能会有差异,请根据实际自行修改。 准备 新…...

【MATLAB源码-第118期】基于matlab的蜘蛛猴优化算法(SMO)无人机三维路径规划,输出做短路径图和适应度曲线。
操作环境: MATLAB 2022a 1、算法描述 蜘蛛猴优化算法(Spider Monkey Optimization, SMO)是一种灵感来源于蜘蛛猴觅食行为的群体智能优化算法。蜘蛛猴是一种生活在南美洲热带雨林中的灵长类动物,它们在寻找食物时展现出的社会行…...
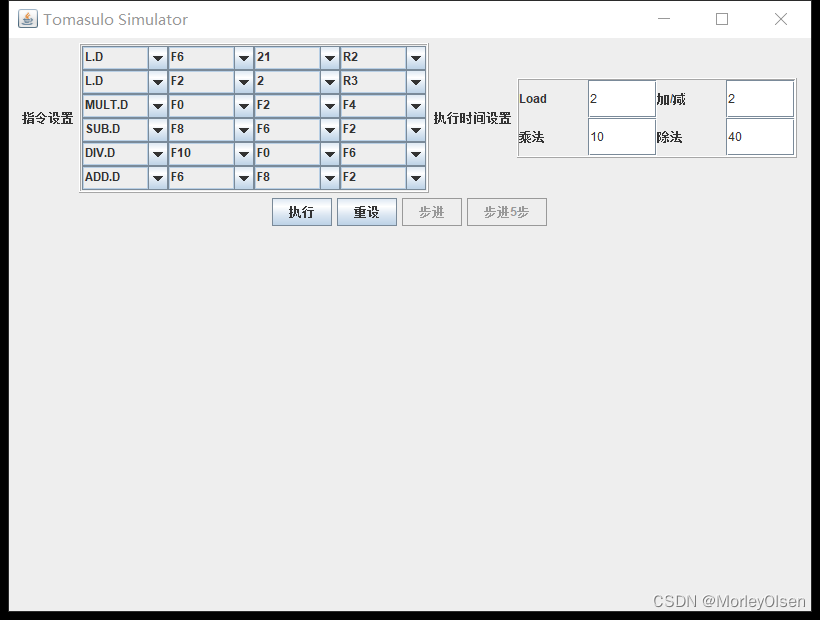
【计算机组成与体系结构Ⅱ】Tomasulo 算法模拟和分析(实验)
实验5:Tomasulo 算法模拟和分析 一、实验目的 1:加深对指令级并行性及开发的理解。 2:加深对 Tomasulo 算法的理解。 3:掌握 Tomasulo 算法在指令流出、执行、写结果各阶段对浮点操作指令以及 load 和 store 指令进行了什么处…...
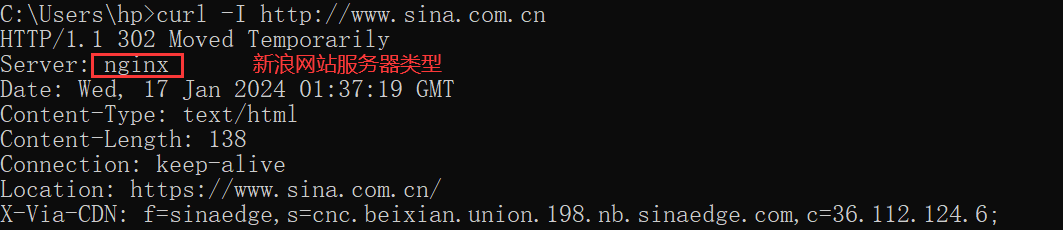
Nginx 简介
1、概念介绍 Nginx ("engine x") 是一个轻量级、高性能的 WEB 服务器软件和反向代理服务器。 Nginx 是由 Igor Sysoev 为俄罗斯访问量第二的 Rambler.ru 站点开发的,第一个公开版本 0.1.0 发布于 2004 年 10 月 4 日。其将源代码以类 BSD 许可证的形式发…...

C++入门学习(一)写一个helloworld
1、头文件 #include <iostream> using namespace std; 任何程序都需要这两句的,写上就好。 2、主文件 int main() {cout<<"Hello World!"<<endl;return 0; } 由于是int型数据,所以要返回一个值,即return0。…...

ChatGPT 股市知识问答
我 2024-01-17 14:16:38 股市交易的关键指标有哪些? ChatGPT 2024-01-17 14:16:38 股市交易中常用的关键指标有很多,以下是一些常见的指标: 股价指标:股价是衡量股票价格变化的重要指标,包括每股收益(EPS…...

uniapp多端评价页
如图所示:评价页 <template><view><!-- 顶部 --><view class"evaluate_head"><image class"headBg" src"/static/evaluate/head.png" mode""></image><view class"headZindex…...
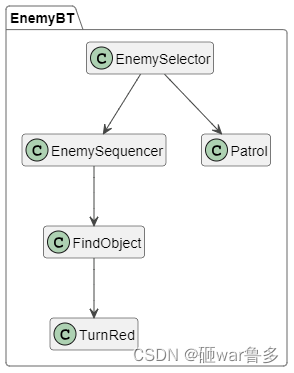
行为树(Behavior Trees)
行为树(Behavior Trees)是一种在游戏开发中广泛使用的AI设计模式,主要用于描述AI的行为和决策过程,实现更加智能和自然的游戏AI。它由多个节点组成,每个节点代表一个行为或决策,按照特定的方式连接在一起&a…...

opensssl BIO方式https客户端
废话不多说,代码中使用了两种https客户端的实现方式。 #include <windows.h> #include <WinSock.h>#pragma comment(lib,"ws2_32.lib") #include "../include/openssl\ssl.h" #include "../include/openssl\err.h"#pragm…...

app评论区升级成功
经过我10个小时的激情工作,评论区终于是可以运行起来了,而且我升级了系统,让代码更加直观和可维护。什么你说不好看,等会就好看了。...

贝壳季报图解:营收189亿 经调整净利16亿同比增15.7%
雷递网 雷建平 5月19日贝壳(纽交所代码:BEKE;香港联交所代号:2423)今日公布其截至2026年3月31日止第一季度未经审计财务业绩。财报显示,贝壳2026年第一季度贝壳实现净收入189亿元,净利润12.55亿…...

Slide离线阅读功能详解:随时随地浏览Reddit内容的完整教程
Slide离线阅读功能详解:随时随地浏览Reddit内容的完整教程 【免费下载链接】Slide Slide is an open-source, ad-free Reddit browser for Android. 项目地址: https://gitcode.com/gh_mirrors/sl/Slide 你是否经常在地铁、飞机或网络信号不佳的地方想要浏览…...

大麦网Python抢票脚本终极指南:告别手速焦虑,轻松获取心仪门票
大麦网Python抢票脚本终极指南:告别手速焦虑,轻松获取心仪门票 【免费下载链接】DamaiHelper 大麦网演唱会演出抢票脚本。 项目地址: https://gitcode.com/gh_mirrors/dama/DamaiHelper 还在为心仪演唱会门票秒光而烦恼吗?还在为黄牛高…...

B站视频下载终极指南:3分钟掌握无水印高清下载技巧
B站视频下载终极指南:3分钟掌握无水印高清下载技巧 【免费下载链接】BiliDownload B站视频下载工具 项目地址: https://gitcode.com/gh_mirrors/bil/BiliDownload 你是否曾经想要保存B站上的精彩视频,却发现下载过程复杂繁琐?或者需要…...

Logisim保姆级避坑指南:从布尔表达式到卡诺图,一次搞定数字逻辑实验常见错误
Logisim数字逻辑实验避坑实战:从表达式到卡诺图的深度解法 为什么你的Logisim电路总是不工作? 刚接触数字逻辑实验时,我总在Logisim里反复调试同一个电路——明明按照教材步骤操作,仿真结果却和预期不符。直到某次深夜debug才发现…...

推理服务为什么一上自动 Prompt 优化就开始成本失控:从 Prompt 版本爆炸到在线 A/B 收敛的工程实战
一、自动 Prompt 优化的成本幻觉 不少团队上线推理服务后,发现同一任务换句 Prompt 输出质量可提升 20%。🚀 自动 Prompt 优化因此成了香饽饽——系统同时维护几十个版本在线分流。但两周后账单涨了 40%。⚡️ 问题不在 Prompt,而是版本爆炸把…...

点支式玻璃幕墙张拉索杆结构设计原理
点支式玻璃幕墙张拉索杆结构设计原理 一、问题的提出 张拉索杆结构点支式玻璃幕墙在我国使用时间虽然不长,但其发展相当迅猛,2002年达到年使用量约70万m2。我们必须清醒的看到此类结构在国内出现时间不长,同工程应用相比,理论研究相对滞后,对此类结构还缺乏深入研究,…...
)
嵌入式网络硬件设计避坑指南:如何为你的SOC选配合适的PHY芯片与接口(MII/RMII实战解析)
嵌入式网络硬件设计避坑指南:如何为你的SOC选配合适的PHY芯片与接口(MII/RMII实战解析) 在嵌入式系统设计中,网络功能已成为现代智能设备的标配需求。无论是工业控制、物联网终端还是消费电子产品,稳定可靠的网络连接往…...

ThinkPad双风扇终极控制指南:TPFanCtrl2让你的笔记本既静音又高效
ThinkPad双风扇终极控制指南:TPFanCtrl2让你的笔记本既静音又高效 【免费下载链接】TPFanCtrl2 ThinkPad Fan Control 2 (Dual Fan) for Windows 10 and 11 项目地址: https://gitcode.com/gh_mirrors/tp/TPFanCtrl2 你是否曾因ThinkPad风扇的持续噪音而分心…...