SVO编译
文章目录
- 软件版本
- 错误
- 编译
- 运行
- 轨迹路径保存
- 运行TUM数据集
- 附录
- 针对svo slam的/svo/pose_imu转为tum格式代码
软件版本
| ubuntu | 20 |
|---|---|
| ros | noetic |
| SVO SLAM | |
| 虚拟机 windows 11 | |
错误
- 常见的git clone问题可以使用DevSidecar解决,在 加速服务-基本设置-绑定IP 设置为0.0.0.0,虚拟机网络连接设置为桥接,之后在虚拟机中设置网络中的 Network Proxy,IP为WindowsIP地址,端口为DevSidecar代理端口。
- server certificate verification failed. CAfile: none CRLfile: none。参考CSDN博客
- Cloning into ‘dbow2_src’…ssh: connect to host github.com port 22: Connection timed out。参考CSDN博客
cd svo_ws/src
git clone https://github.com/dorian3d/DBoW2.git
tar -cvf DBoW2.tar DBoW2
# 修改svo_ws/src/dbow2_catkin/CMakeLists.txt
ExternalProject_Add(dbow2_srcGIT_REPOSITORY git@github.com:dorian3d/DBoW2.gitCMAKE_ARGS -DCMAKE_INSTALL_PREFIX=${CATKIN_DEVEL_PREFIX}BUILD_COMMAND CXXFLAGS=-i${CATKIN_DEVEL_PREFIX}/include makeINSTALL_COMMAND make install
)
# 改为 XXXXXX为DBoW2.tar所在路径
ExternalProject_Add(dbow2_srcURL XXXXXX/DBoW2.tarCMAKE_ARGS -DCMAKE_INSTALL_PREFIX=${CATKIN_DEVEL_PREFIX}BUILD_COMMAND CXXFLAGS=-i${CATKIN_DEVEL_PREFIX}/include makeINSTALL_COMMAND make install
)
编译
创建工作空间,克隆代码
mkdir -p svo_ws/src && cd svo_ws/src
cd ..
catkin config --init --mkdirs --extend /opt/ros/noetic --cmake-args -DCMAKE_BUILD_TYPE=Release -DEIGEN3_INCLUDE_DIR=/usr/include/eigen3
cd src
git clone https://github.com/uzh-rpg/rpg_svo_pro_open.git
依赖下载
# 该步骤任选其一执行
# 1
vcs-import < ./rpg_svo_pro_open/dependencies.yaml
# 1 结束# 2
git clone https://github.com/catkin/catkin_simple.git &&\
git clone https://github.com/zurich-eye/cmake_external_project_catkin.git &&\
git clone https://github.com/ethz-asl/eigen_catkin.git &&\
git clone https://github.com/ethz-asl/eigen_checks.git &&\
git clone https://github.com/uzh-rpg/fast_neon.git &&\
git clone https://github.com/ethz-asl/gflags_catkin.git &&\
git clone https://github.com/ethz-asl/glog_catkin.git &&\
git clone https://github.com/ethz-asl/minkindr.git &&\
git clone https://github.com/ethz-asl/opengv.git &&\
git clone https://github.com/ethz-asl/minkindr_ros.git &&\
git clone https://github.com/ethz-asl/ceres_catkin.git &&\
git clone https://github.com/uzh-rpg/dbow2_catkin.git &&\
git clone https://github.com/uzh-rpg/rpg_trajectory_evaluation.git
# 2结束
编译
touch minkindr/minkindr_python/CATKIN_IGNORE
cd rpg_svo_pro_open/svo_online_loopclosing/vocabularies && ./download_voc.sh
cd ../../..
catkin build
运行
启动SVO核心ROS节点
source XXXXXX/devel/setup.bash
roslaunch svo_ros euroc_mono_frontend_imu.launch
播放数据集
rosbag play XXXXXX/DataSets/MH_01_easy.bag
运行图片

轨迹路径保存
svo轨迹数据通过 /svo/points 话题发布,该话题为visualization_msgs/Marker(中文参考)类型。旋转数据通过 /svo/pose_imu 发布,该话题为geometry_msgs/PoseWithCovarianceStamped(中文参考)类型。
轨迹路径保存主要分为以下几步:
- 启动svo_ros
- 播放bag包,在开始后按下空格暂停
- 新开两个终端记录话题信息/svo/points和/svo/pose_imu
- 继续播放bag包
- 将/svo/pose_imu数据转化为
进行轨迹对比时,使用tum格式进行对比。EUROC转tum命令如下
evo_traj euroc groundtruth.csv --save_as_tum
/svo/pose_imu原始数据转化为tum格式代码见附录
获取到真实轨迹与实际轨迹后进行对比,代码与结果如下(感觉结果有点不对,希望知道的人指出):data为真实轨迹,svo_result为ros结果
evo_traj tum data.tum svo_result.txt -p -s --align_origin -a --plot_mode=xyz --ref=data.tum



运行TUM数据集
待补充
附录
针对svo slam的/svo/pose_imu转为tum格式代码
in_file_path = "svo_pose_data.txt"
out_file_path = "svo_result.txt" rfp = open(in_file_path)
wfp = open(out_file_path,"w")
file_end = False
while file_end != True:time = 0tx = 0ty = 0tz = 0qx = 0qy = 0qz = 0qw = 0for i in range(19):line = rfp.readline()if line == "":file_end = Truebreakif i == 3:time += float(line.split(":")[1])elif i == 4:time += float(line.split(":")[1])/1e9elif i == 9:tx = float(line.split(":")[1])elif i == 10:ty = float(line.split(":")[1])elif i == 11:tz = float(line.split(":")[1])elif i == 13:qx = float(line.split(":")[1])elif i == 14:qy = float(line.split(":")[1])elif i == 15:qz = float(line.split(":")[1])elif i == 16:qw = float(line.split(":")[1])else:passwrite_str = "{time} {tx} {ty} {tz} {qx} {qy} {qz} {qw}\n".format(time=time,tx=tx,ty=ty,tz=tz,qx=qx,qy=qy,qz=qz,qw=qw)# print(write_str)wfp.write(write_str)
rfp.close()
wfp.close()
print("保存完毕")
相关文章:
SVO编译
文章目录 软件版本错误编译运行轨迹路径保存运行TUM数据集 附录针对svo slam的/svo/pose_imu转为tum格式代码 软件版本 ubuntu 20 rosnoeticSVO SLAM虚拟机 windows 11 错误 常见的git clone问题可以使用DevSidecar解决,在 加速服务-基本设置-绑定IP 设置为0.0.0…...

探索未知:最新发布的顶级浏览器,为你带来前所未有的浏览体验
目录 学习目标: 学习内容: 学习时间: 学习产出: 基本功能和操作方法: 如何打开和关闭浏览器 如何新建和关闭标签页 前进、后退、刷新页面等导航操作 使用地址栏和搜索栏进行访问和搜索 管理浏览器的历史记录 高级功能&…...

EasyX图形化学习(三)
1.帧率: 即每秒钟界面刷新次数,下面以60帧为例: 1.数据类型 clock_t: 用来保存时间的数据类型。 2.clock( ) 函数: 用于返回程序运行的时间,无需参数。 3.例子: 先定义所需帧率: const …...

git-生成证书、公钥、私钥、error setting certificate verify locations解决方法
解决方法 方法1-配置证书、公钥、私钥打开Git Bash设置名称和邮箱执行,~/.ssh执行,ssh-keygen -t rsa -C "这是你的邮箱",如图:进入文件夹可以看到用记事本之类的软件打开id_rsa.pub文件,并且复制全部内容。…...
论文笔记(四十)Goal-Auxiliary Actor-Critic for 6D Robotic Grasping with Point Clouds
Goal-Auxiliary Actor-Critic for 6D Robotic Grasping with Point Clouds 文章概括摘要1. 介绍2. 相关工作3. 学习 6D 抓握政策3.1 背景3.2 从点云抓取 6D 策略3.3 联合运动和抓握规划器的演示3.4 行为克隆和 DAGGER3.5 目标--辅助 DDPG3.6 对未知物体进行微调的后视目标 4. 实…...

k8s学习-Deployment
Kubernetes通过各种Controller来管理Pod的生命周期 。 为了满足不同业 务 景 , Kubernetes 开发了Deployment、ReplicaSet、DaemonSet、StatefuleSet、Job等多种Controller。我们⾸先学习最常用Deployment。 1.1 Kubectl命令直接创建 第一种是通过kubectl命令直接…...
Unity之四元数
欧拉角 万向节死锁 四元数是什么 Unity中四元数的初始化 四元数和欧拉角的互相转换 补充 四元数相乘代表旋转四元数...
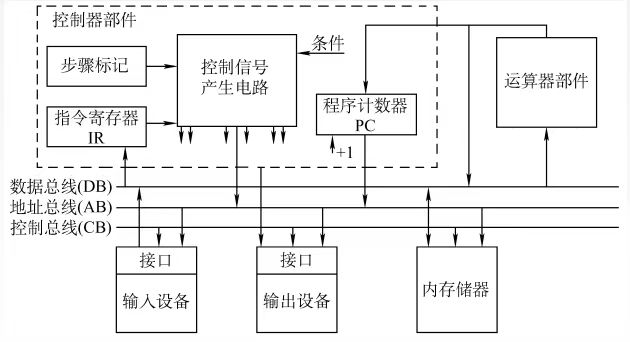
【计算机硬件】3、输入输出技术、总线结构
文章目录 输入输出技术内存与接口地址的编址方法1、 内存与接口地址独立编址方法2、内存与接口地址统一编址方法 计算机和外设间的数据交互方式1、程序控制(查询)方式2、程序中断方式3、DMA方式(直接主存存取) 总线结构 输入输出技术 内存与接口地址的编…...
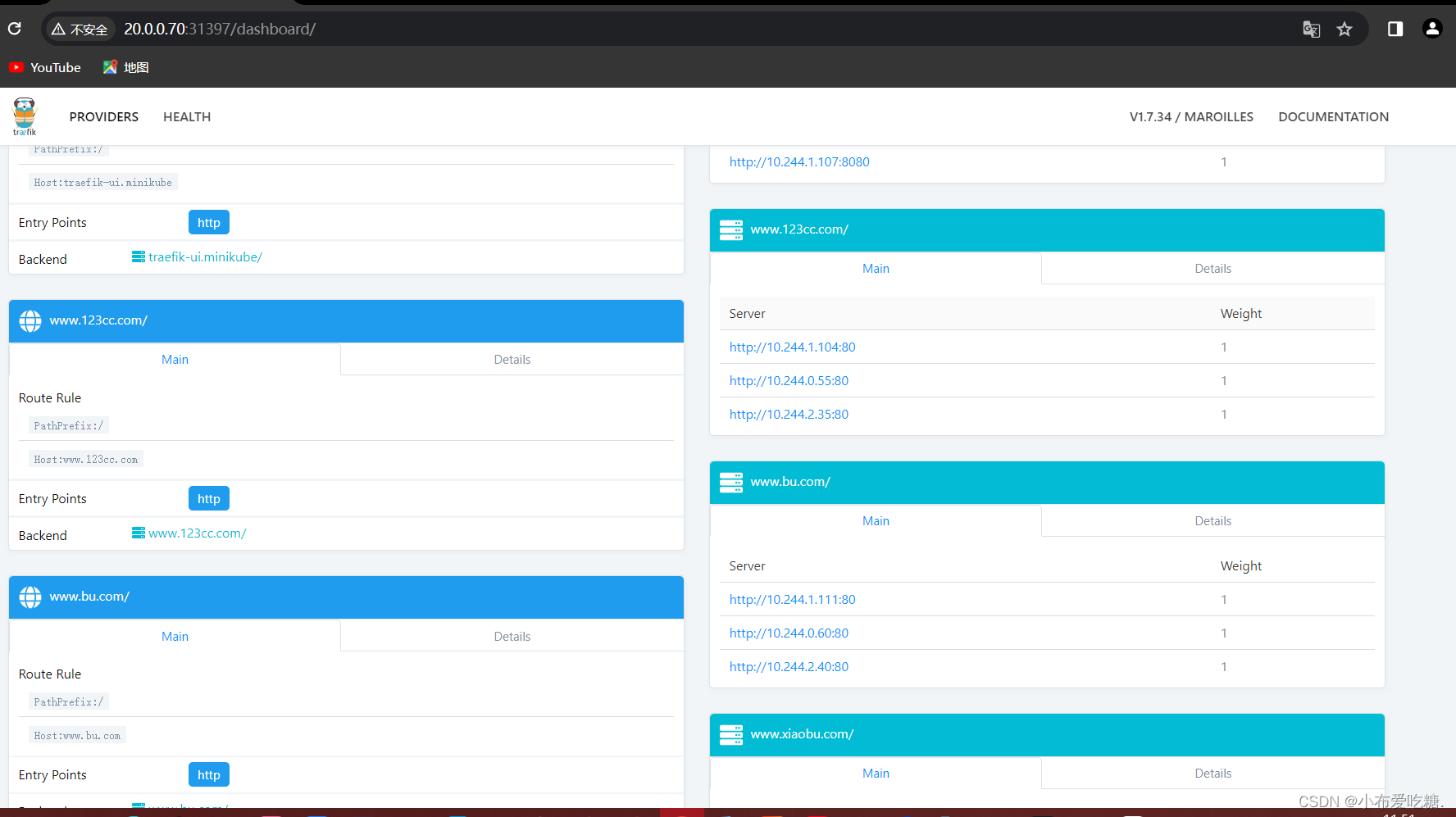
k8s的对外服务--ingress
service作用体现在两个方面 1、集群内部 不断跟踪pod的变化,更新endpoint中的pod对象,基于pod的IP地址不断变化的一种服务发现机制 2、集群外部 类似负载均衡器,把流量ip端口,不涉及转发url(http,https&a…...
CSS 雷达监测效果
<template><view class="center"><view class="loader"><view></view></view></view></template><script></script><style>/* 设置整个页面的背景颜色为深灰色 */body {background-col…...

C# System.MissingMethodException
C#应用程序工程调用C#类库工程生成的动态链接库调试时报错: System.MissingMethodException HResult0xFFFFFFFF Message找不到方法…… 软件结构如下: using System; using System.Collections.Generic; using System.Linq; using System.Text; usi…...

Redis面试题23
Redis 的持久化机制是什么? 答:Redis 提供了两种持久化机制来保证数据的持久性,即 RDB(Redis Database)和 AOF(Append Only File)。 RDB 持久化:RDB 是 Redis 默认的持久化方式。它…...
Linux中的yum源仓库和NFS文件共享服务
一.yum简介 1.1 yum简介 yum,全称“Yellow dog Updater, Modified”,是一个专门为了解决包的依赖关系而存在的软件包管理器。类似于windows系统的中电脑软件关键,可以一键下载,一键安装和卸载。yum 是改进型的 RPM 软件管理器&am…...

【LeetCode2744】最大字符串配对数目
1、题目描述 【题目链接】 标签:数组,哈希表,字符串,模拟 给你一个下标从 0 开始的数组 words ,数组中包含 互不相同 的字符串。 如果字符串 words[i] 与字符串 words[j] 满足以下条件,我们称它们可以…...

安全加速SCDN是什么
安全加速SCDN(Secure Content Delivery Network,SCDN) 是集分布式DDoS防护、CC防护、WAF防护、BOT行为分析为一体的安全加速解决方案。已使用内容分发网络(CDN)或全站加速网络(ECDN)的用户&…...
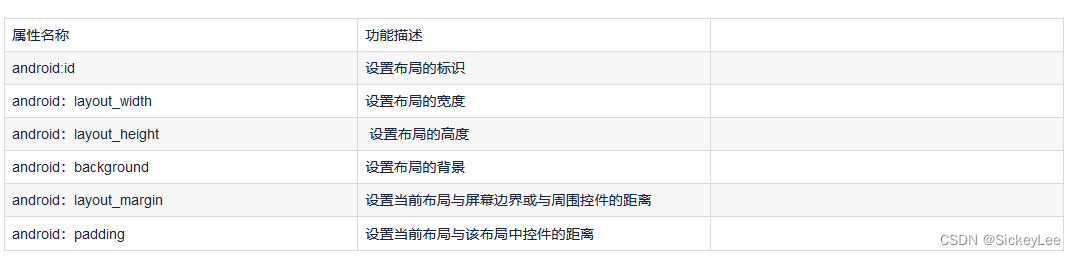
Android 布局菜鸟 android中的布局类型和特点?
一、LinearLayout(线性布局) 1、 特点: 主要以水平或垂直方式来排列界面中的控件。并将控件排列到一条直线上。在线性布局中,如果水平排列,垂直方向上只能放一个控件,如果垂直排列,水平方向上也只能放一个控件。 2、适⽤场景: Android开发中最常见的 ⼀种布局⽅式,排列…...

2023总结与2024寒假计划
王泽政 2023 的总结 学习总结 关于 2023 学习总体上来讲,2023 学的东西还是不少的,有对技术栈广度的扩展,也有对计算机深度的挖掘。 学习内容总结: 学习 React 学习浏览器渲染原理 学习计算机网络 学习 Next.js 学习 Nest.…...

016-Vue-黑马2023:前后端分离开发(在线接口文档),前端工程化、Element、vue编写一个完成页面、Vue路由、vue打包部署到nginx
第三节 前后端分离开发 1、介绍 开发模式 前后端混合开发:传统开发模式 前后端分离开发:当前最为主流的开发模式 页面原型需求案例:分析出接口文档 离线开发文档示例: 2、YAPI(官网已停用) 202…...
如何给新华网投稿发稿?新华网的媒体发稿方法步骤
现如今,互联网已经成为了人们获取信息的主要途径,各大媒体网站也成为了发布自己作品的首选平台。其中,新华网作为中国最具影响力的新闻媒体之一,其内容覆盖面广、触及人群众多,因此,能够在新华网上发表文章…...

为什么 macOS 比 Windows 稳定?
在计算机操作系统领域,macOS 和 Windows 分别是苹果公司和微软公司的主打产品。尽管两者都拥有大量的用户群体,但在稳定性和用户体验方面,macOS 常常被认为优于 Windows。那么,为什么 macOS 比 Windows 更稳定呢? 我们…...

MSP430单片机低功耗设计实战:从架构到代码的灵活性解析
1. 项目概述:为什么是MSP430?如果你在嵌入式领域摸爬滚打了一段时间,尤其是在对功耗极其敏感的应用场景里,比如智能穿戴、便携医疗设备、无线传感器网络或者那些需要电池供电数年的工业传感器,那么“MSP430”这个名字对…...

CircuitJS1:浏览器中的电子电路仿真神器完全指南
CircuitJS1:浏览器中的电子电路仿真神器完全指南 【免费下载链接】circuitjs1 Electronic Circuit Simulator in the Browser 项目地址: https://gitcode.com/gh_mirrors/ci/circuitjs1 想要学习电子电路却苦于没有实验设备?需要验证电路设计却不…...

LabVIEW图形化编程实战:从数据流原理到高效测控系统开发
1. 项目概述与核心价值今天咱们来聊聊LabVIEW这门工具。很多刚接触自动测试、数据采集或者仪器控制的朋友,可能都听说过它的大名,但上手时总觉得它和传统的文本编程语言(比如C、Python)不太一样,有点无从下手。我最早接…...

观察Taotoken模型广场在项目初期技术选型中的辅助作用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 观察Taotoken模型广场在项目初期技术选型中的辅助作用 在启动一个涉及大模型能力的新项目时,技术选型往往是第一道门槛…...
如何成为供需平衡的“定海神针”?)
SAP PP实战解析:MPS(主生产计划)如何成为供需平衡的“定海神针”?
1. 为什么企业需要MPS这根"定海神针"? 想象一下你正在经营一家汽车制造厂。周一销售部突然接到500辆车的加急订单,周三又被告知原定300辆的订单要取消。如果直接根据这些波动安排生产,车间可能周一忙到通宵,周三却闲置停…...

微积分入门书籍之日韩篇
微积分的奇幻旅程(2020.02) 超简单的微积分 函数、图、斜率、面积 ,一小时掌握微积分的本质(2024.03) 简单微积分 学校未教过的超简易入门技巧(2018.07) 数学女孩的秘密笔记:微分篇 数学女孩的秘密笔记:积分篇 超图解趣…...

TVBox 最新版本 | 接口持续更新 | 追剧稳定不失效
分享一个自用很久、一直在持续维护更新的 TVBox 版本,主打稳定、流畅、长期可用,接口会定期更新,避免失效问题。 🔥资源特点 精准区分 64 位新设备 / 32 位老设备,安装更适配全设备兼容:电视、盒子、手机…...

别再乱设Public了!Minio权限控制实战:从用户、分组到自定义策略的完整配置流程
别再乱设Public了!Minio权限控制实战:从用户、分组到自定义策略的完整配置流程 在分布式存储系统的日常运维中,权限配置不当引发的数据泄露事件屡见不鲜。最近某科技公司因对象存储桶误设为公开访问,导致数万份客户资料暴露的案例…...
)
用Xilinx Artix-7 FPGA手把手教你实现一个32位ALU(含数码管显示与状态灯)
从零构建Xilinx Artix-7 FPGA上的32位ALU实战:数码管动态显示与状态灯设计 在数字电路与计算机体系结构的学习中,算术逻辑单元(ALU)作为CPU的核心组件,其设计与实现一直是硬件工程师的必修课。本文将带领读者使用Xilinx Artix-7 FPGA开发板(x…...

Perplexity远程岗申请失败率高达73%?揭秘HR系统自动过滤的4个隐形关键词及规避话术库
更多请点击: https://kaifayun.com 第一章:Perplexity招聘信息搜索 Perplexity AI 作为一家快速发展的生成式人工智能公司,其招聘动态常通过官方渠道及技术社区实时更新。掌握高效、精准的招聘信息检索方法,是开发者与研究人员了…...