Unity中URP下额外灯角度衰减
文章目录
- 前言
- 一、额外灯中聚光灯的角度衰减
- 二、AngleAttenuation函数的传入参数
- 1、参数:spotDirection.xyz
- 2、_AdditionalLightsSpotDir
- 3、参数:lightDirection
- 4、参数:distanceAndSpotAttenuation.zw
- 5、_AdditionalLightsAttenuation
- 三、AngleAttenuation函数的程序体
- 1、我们先来看一下SdotL的结果
- 2、cosOuterAngle:聚光灯外圈与聚光灯夹角的余弦值
- 3、cosInnerAngle:聚光灯内圈与聚光灯夹角角的余弦值
- 4、最后,就可以使用公式来计算了
- 5、但是,我们在程序体中,看见的却是这样一句话
- 6、最终、Unity还对其做了平方处理,目的是加强角度衰减效果
前言
在上一篇文章中,我们推导了URP下额外灯的距离衰减。
- Unity中URP下额外灯的距离衰减
在这篇文章中,我们推导一下URP下额外灯的角度衰减。角度衰减只有在聚光灯中才有用。
一、额外灯中聚光灯的角度衰减
- 衰减包括:距离衰减 和 角度衰减
- 我们这篇文章主要分析 角度衰减,角度衰减是聚光灯独有的。
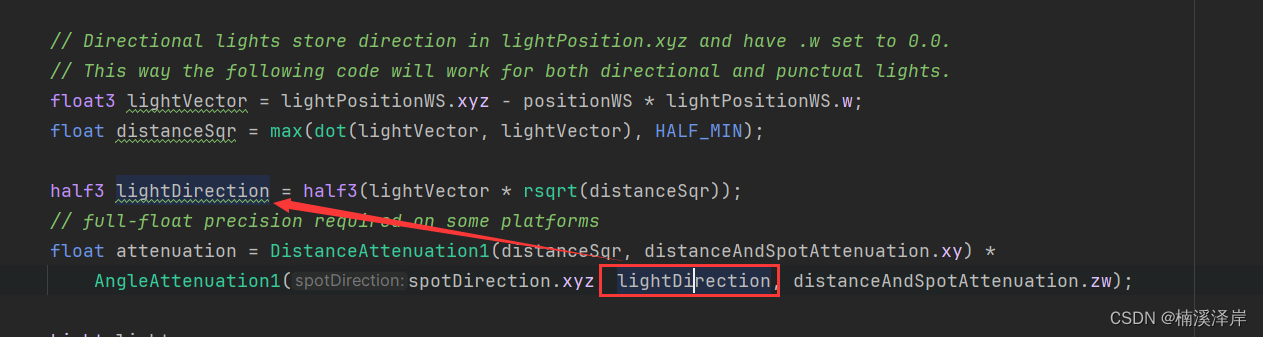
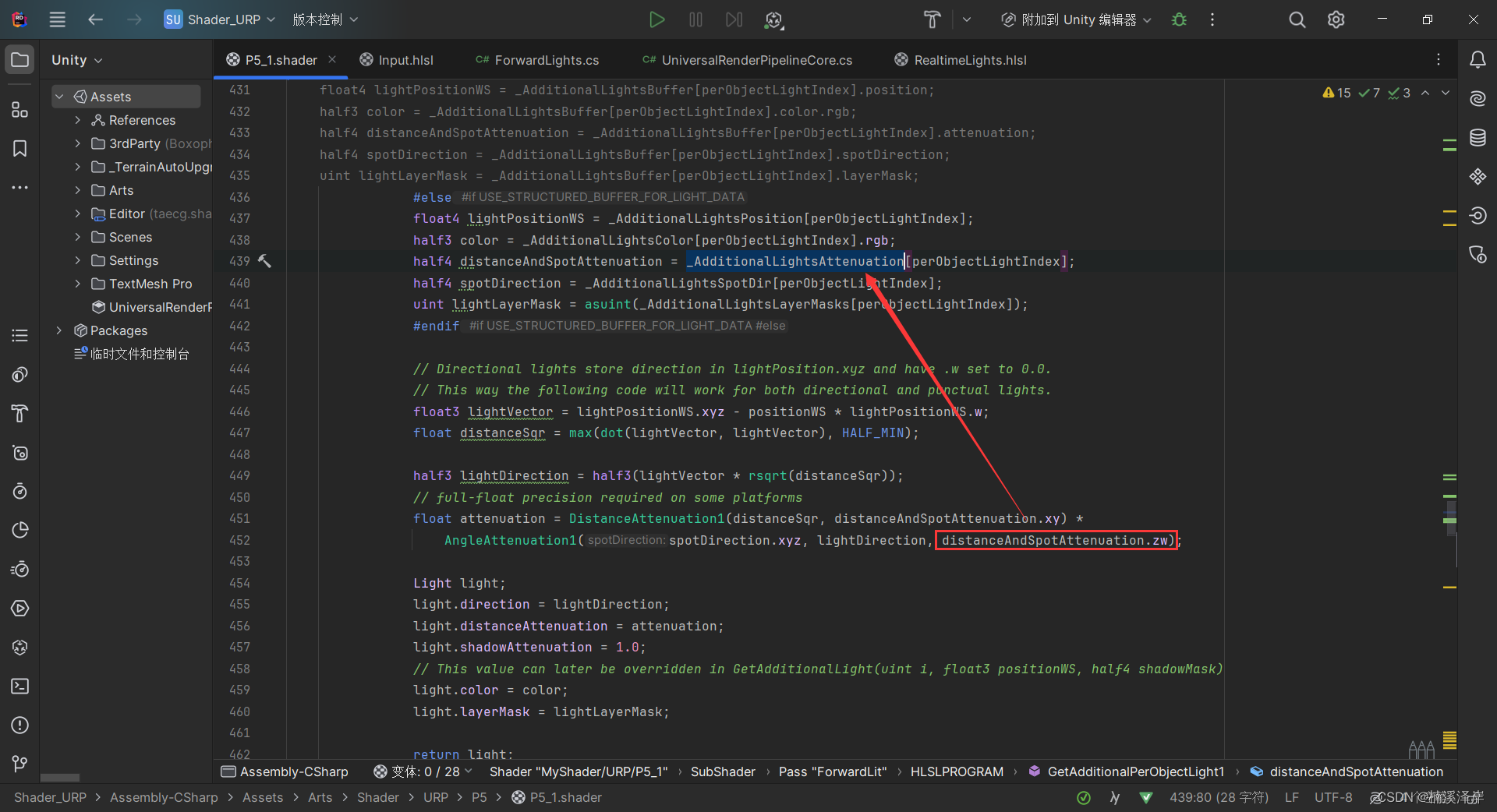
AngleAttenuation1(spotDirection.xyz, lightDirection, distanceAndSpotAttenuation.zw);
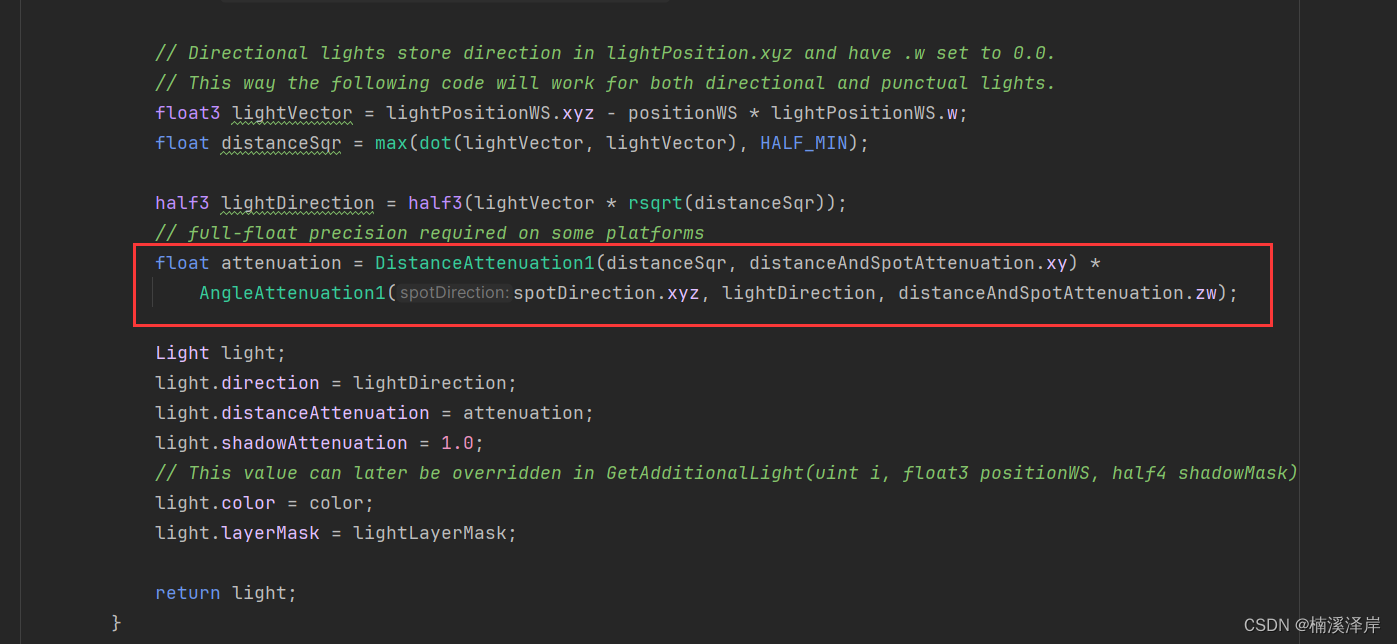
二、AngleAttenuation函数的传入参数
- 调用
AngleAttenuation1(spotDirection.xyz, lightDirection, distanceAndSpotAttenuation.zw);
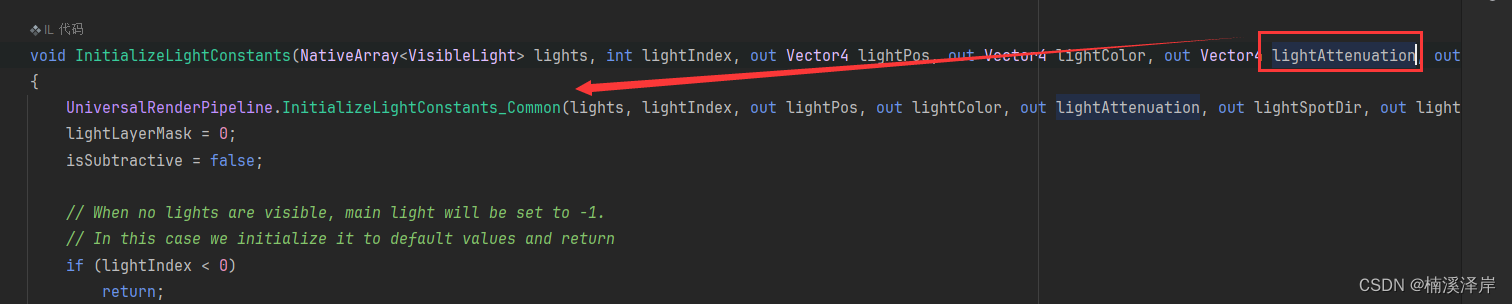
1、参数:spotDirection.xyz
-
该参数是通过内置变量获取的
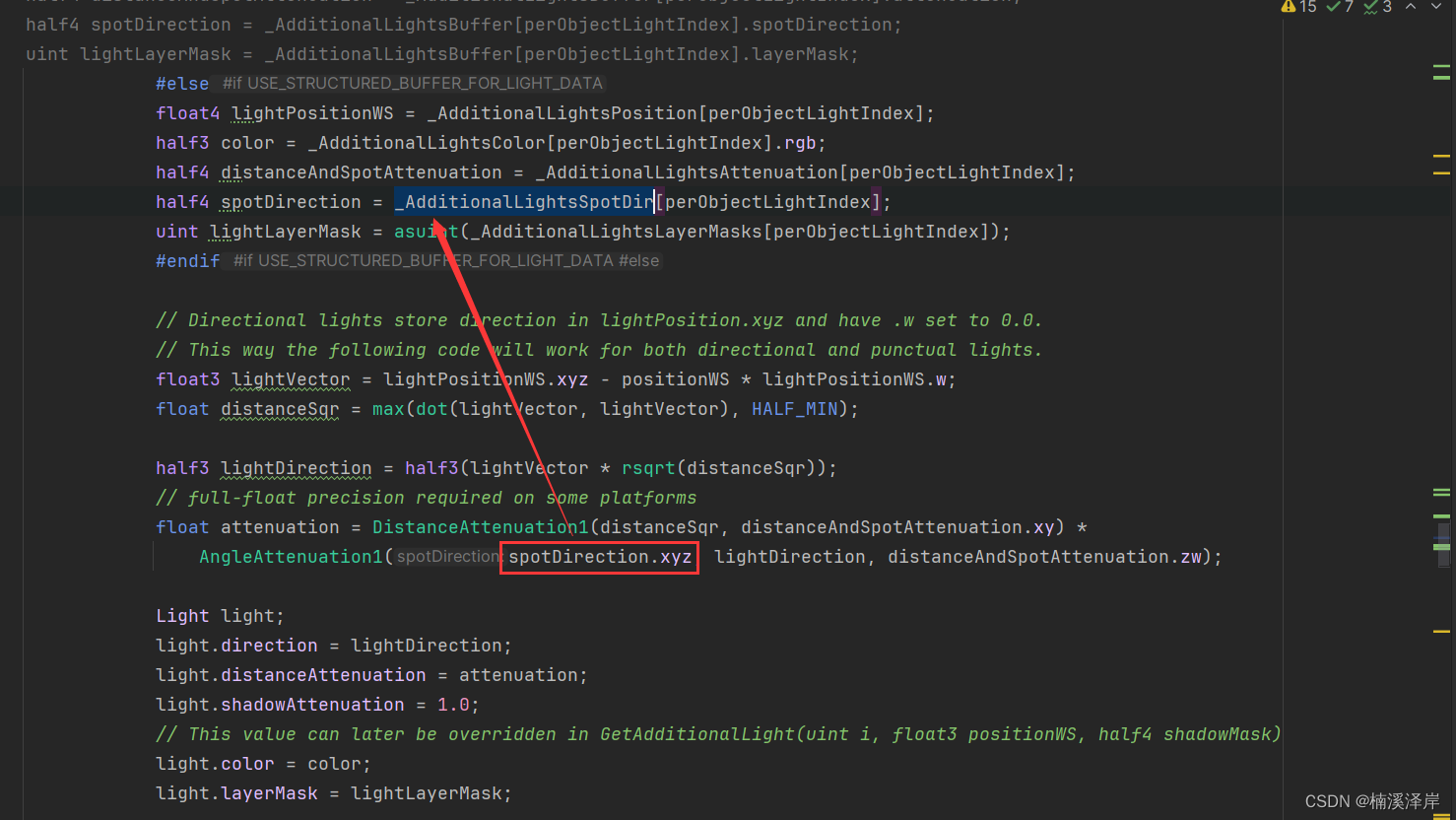
-
该内置变量是C#提前计算好的
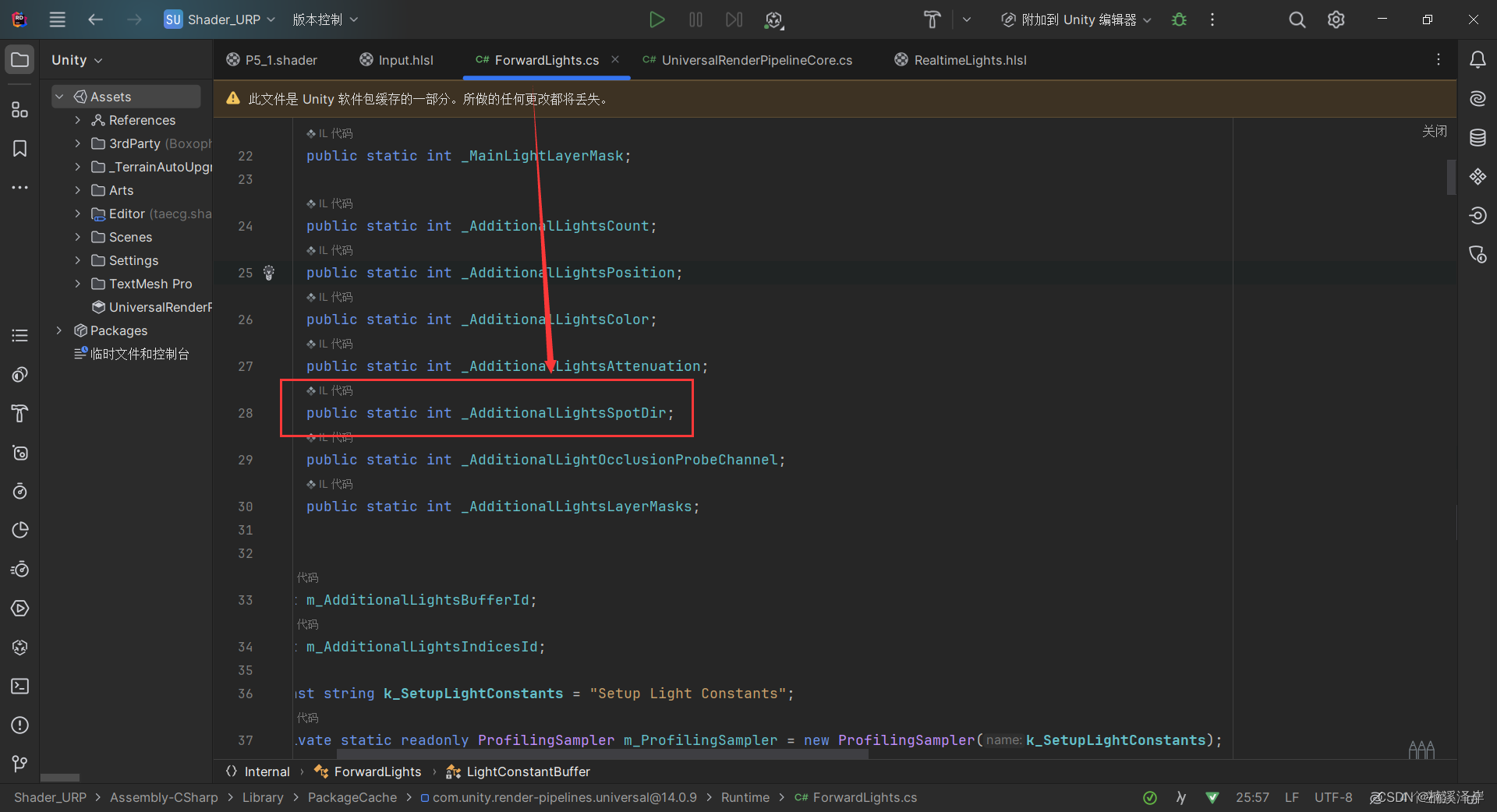
2、_AdditionalLightsSpotDir
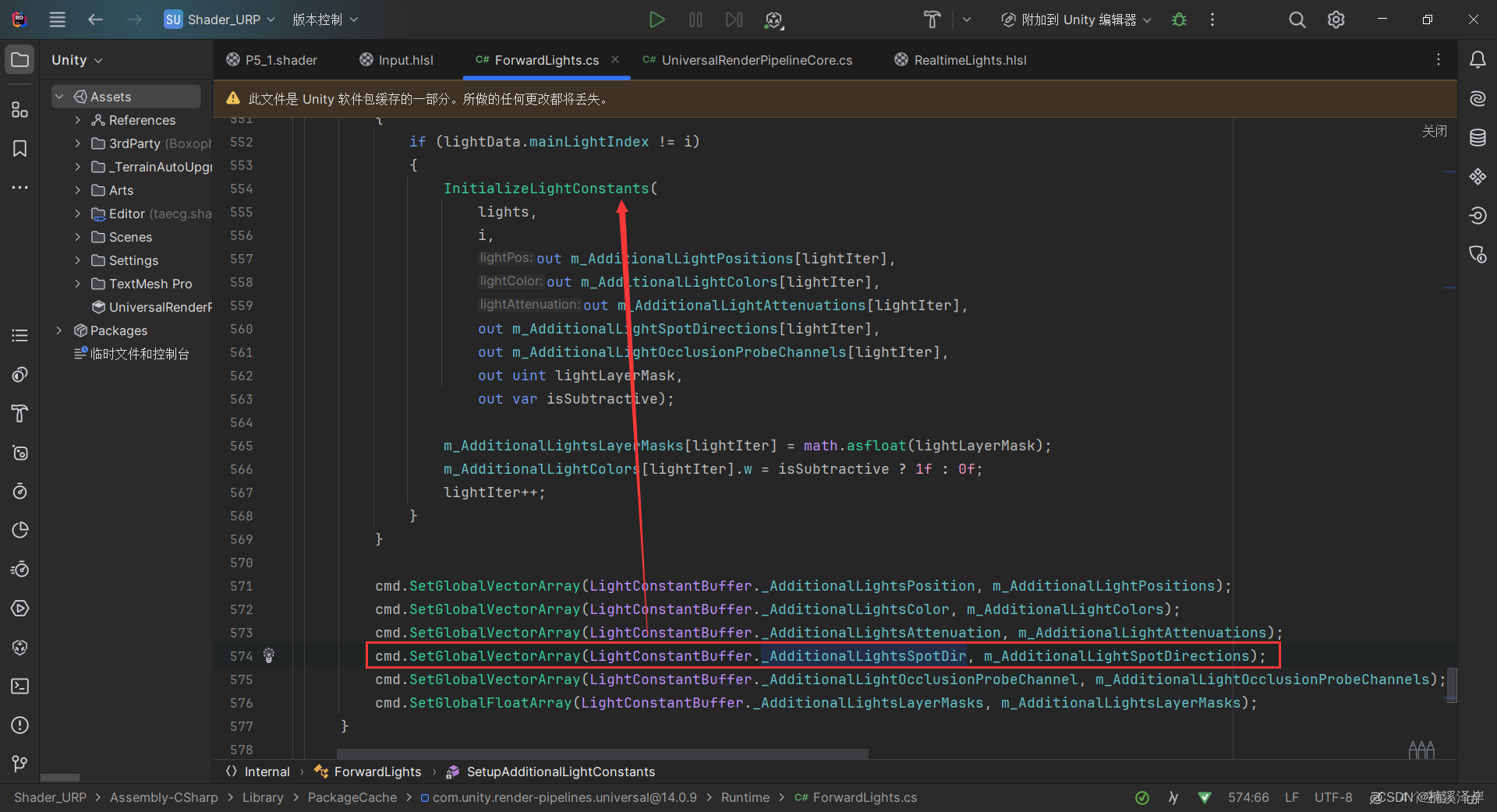
- 我们来看一下C#中怎么计算得出该参数
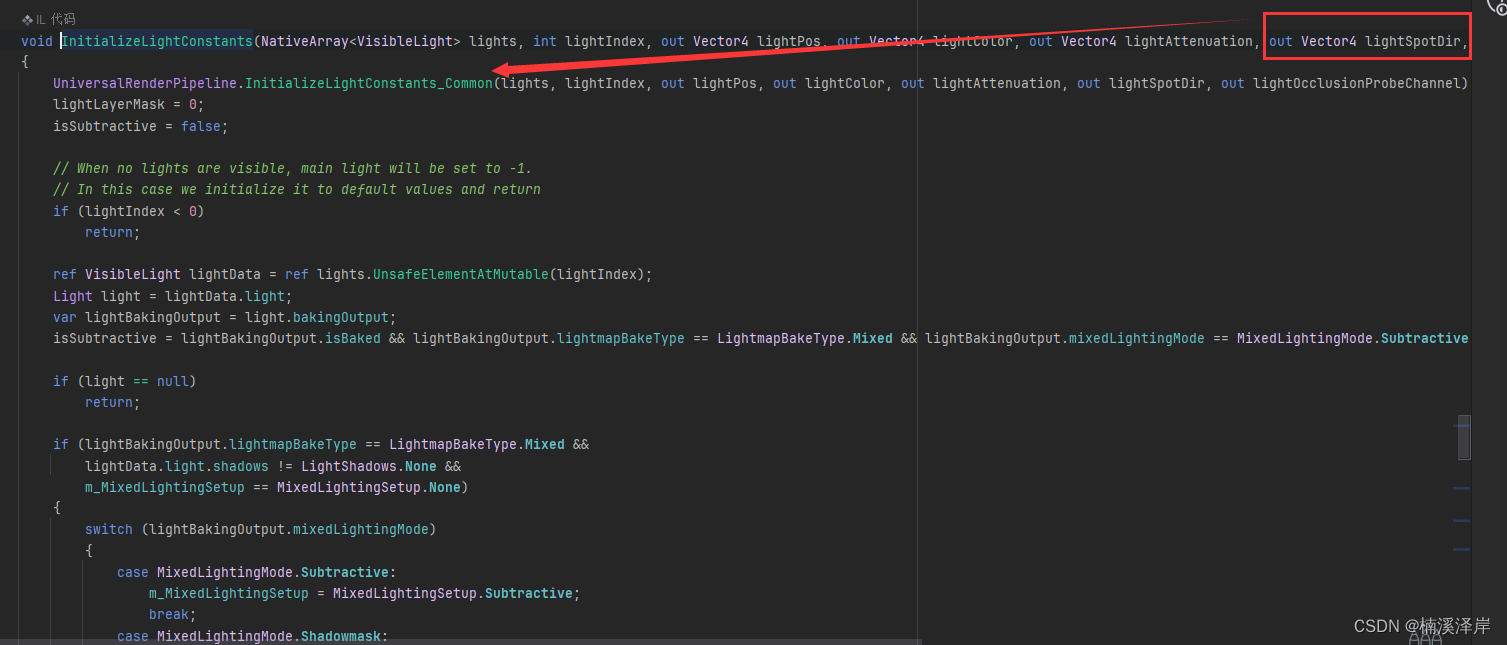
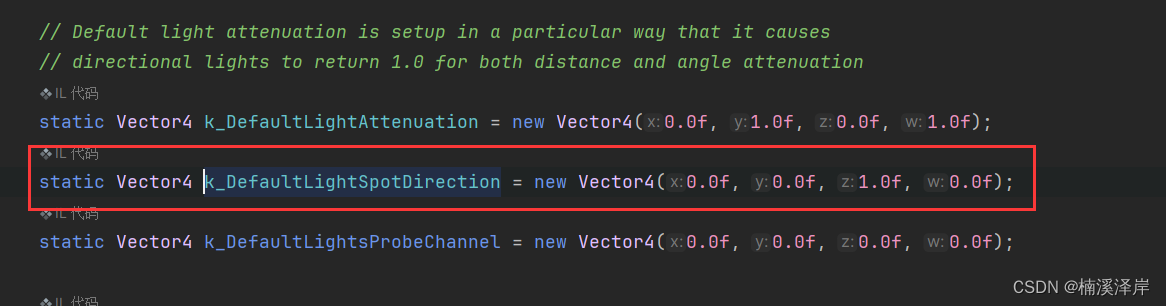
- 一开始会赋值一个聚光灯方向默认值
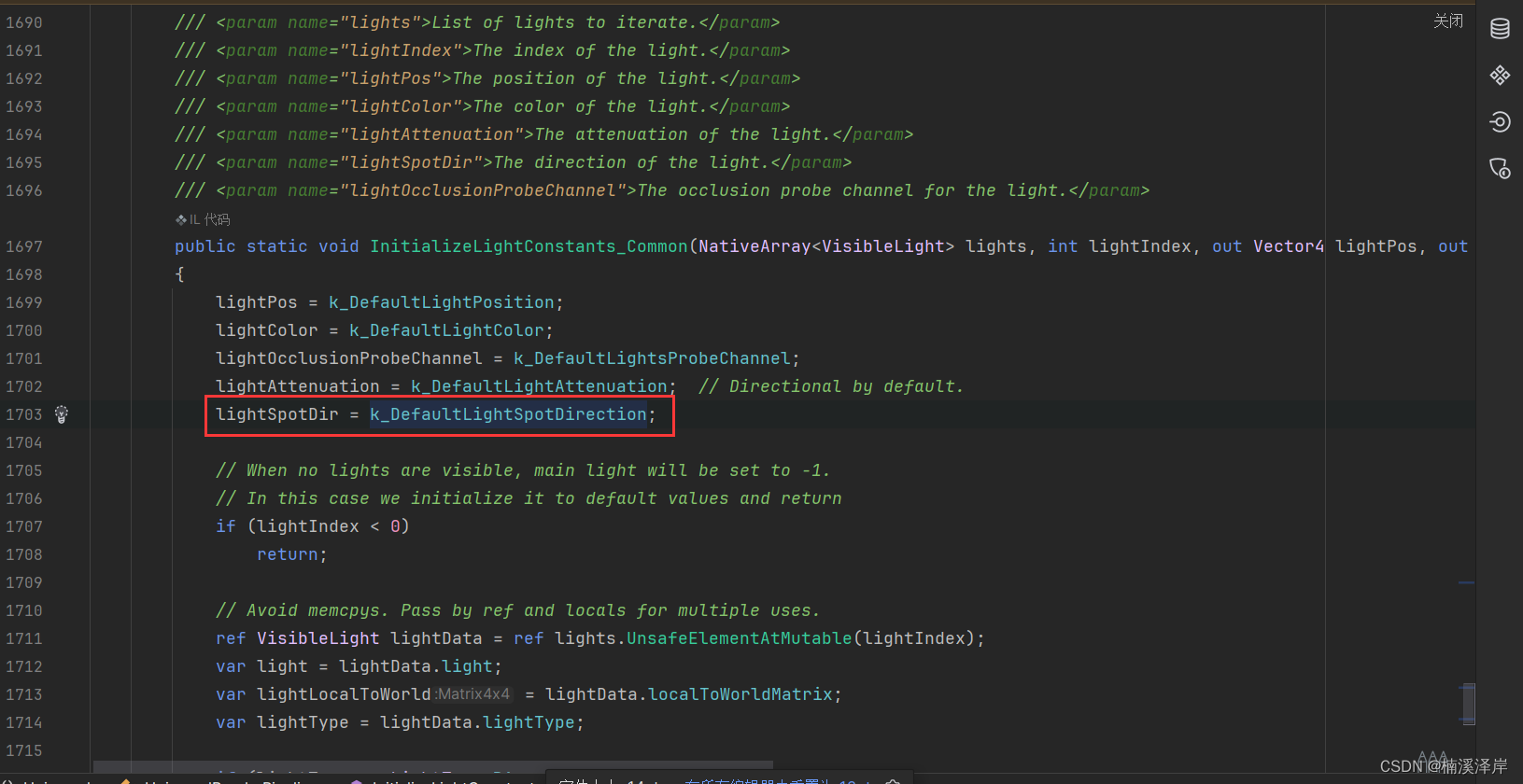
- k_DefaultLightSpotDirection,默认值为(0,0,1,0)
- 非平行灯下,在对距离衰减修改后,还会判断是否是聚光灯
- 是聚光灯,则会修改聚光灯方向的默认值
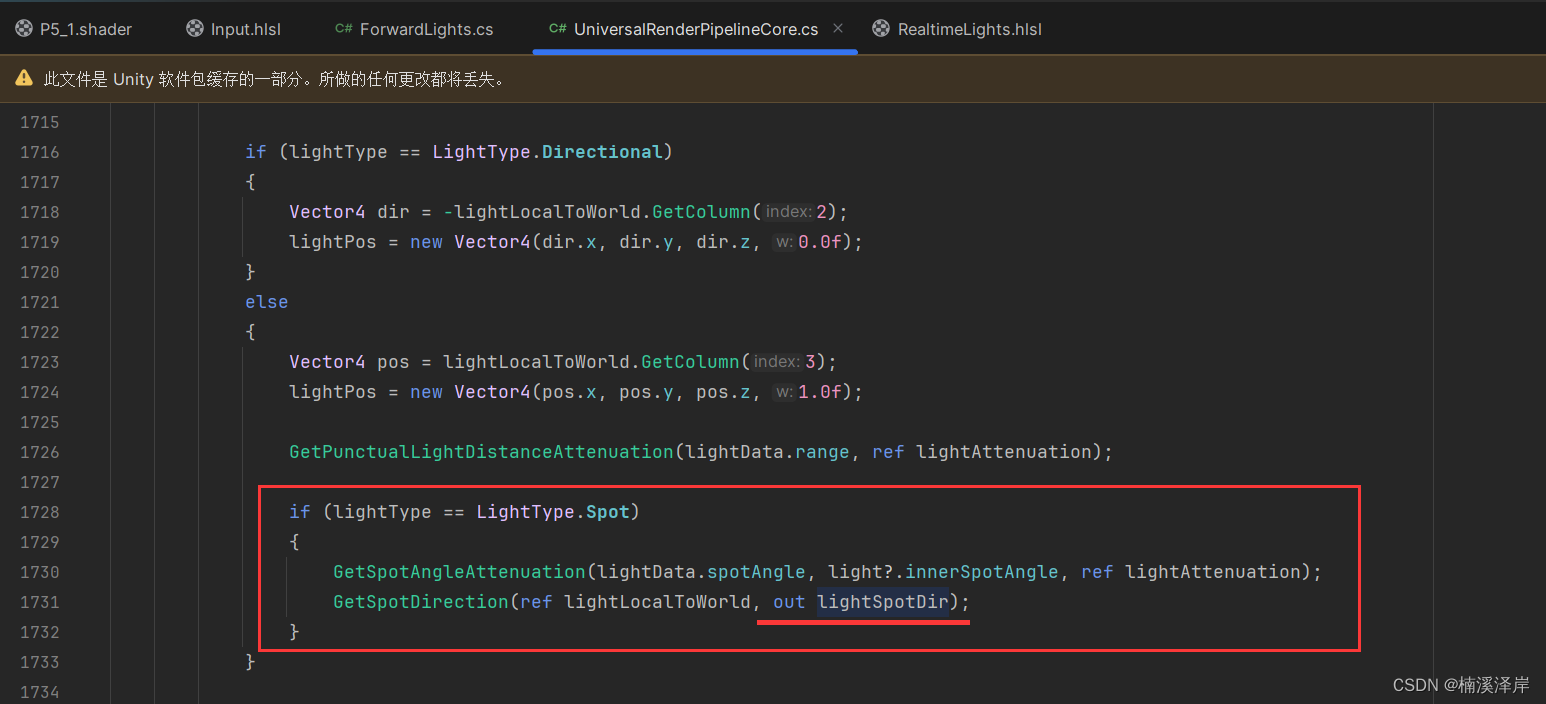
- 修改时,会获取聚光灯方向,并对其取反

3、参数:lightDirection
- 之前计算出的,额外光方向的单位向量
4、参数:distanceAndSpotAttenuation.zw
- 该参数是读取的内置参数
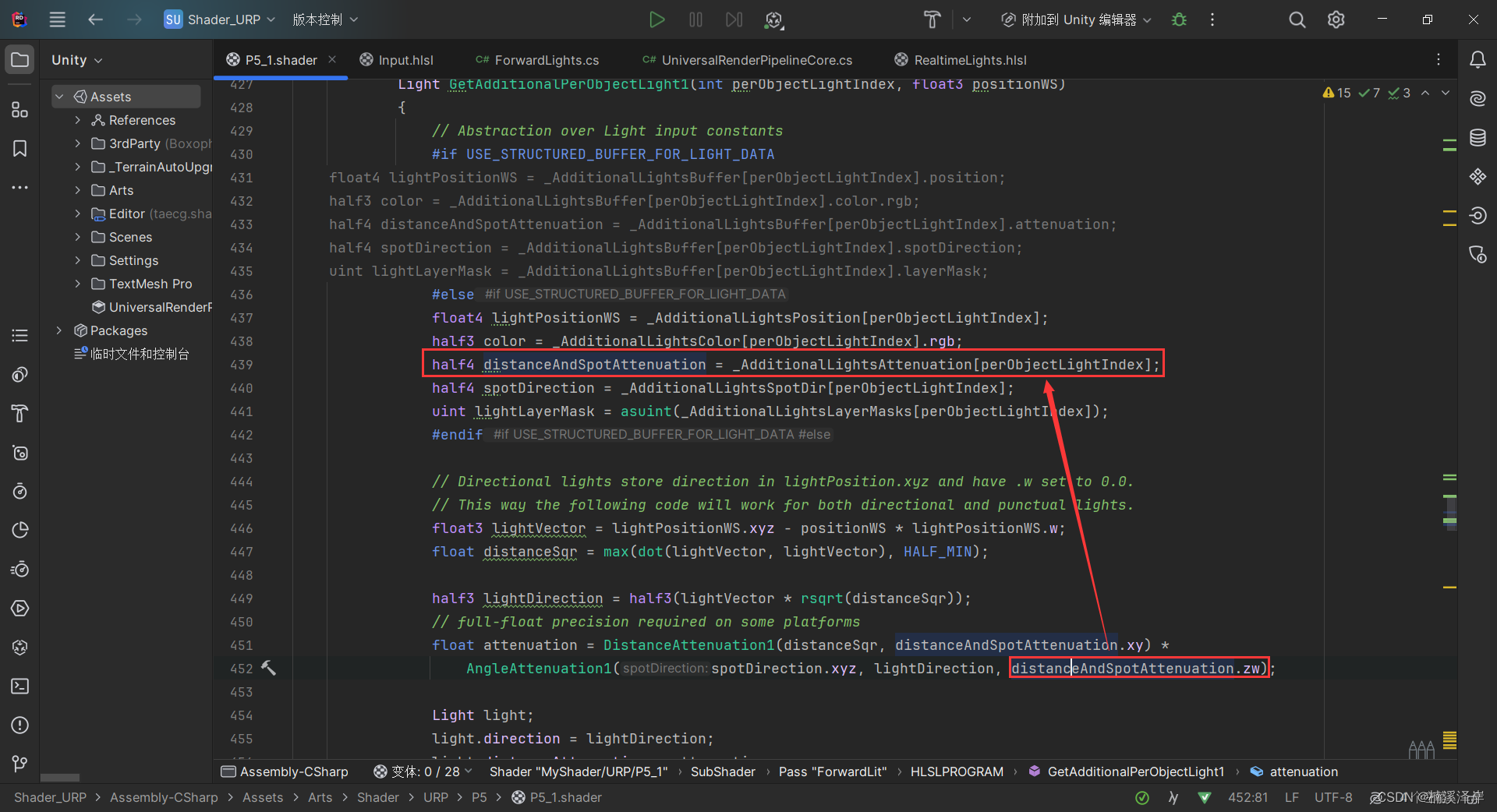
- 该内置变量是C#提前计算好的
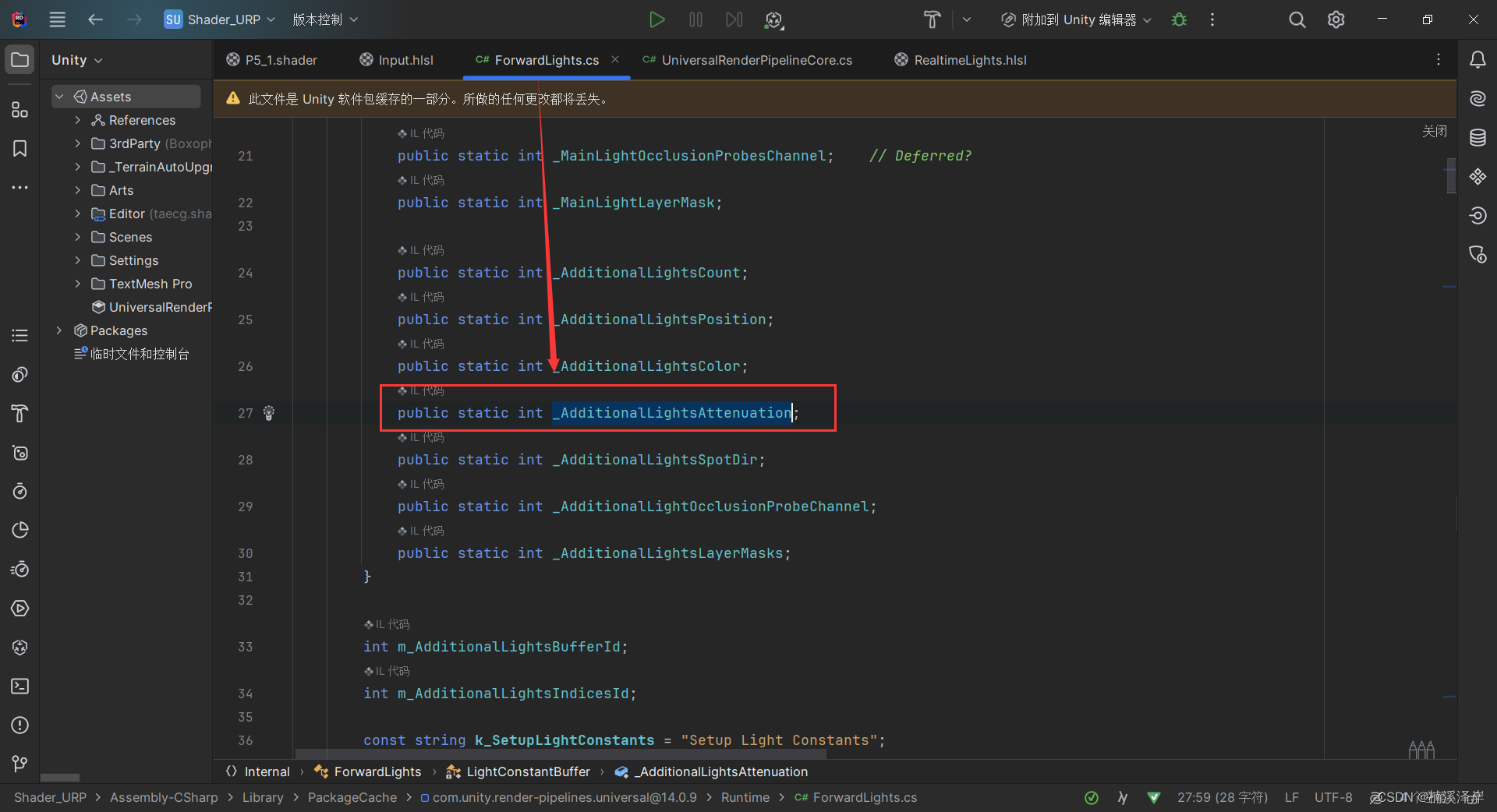
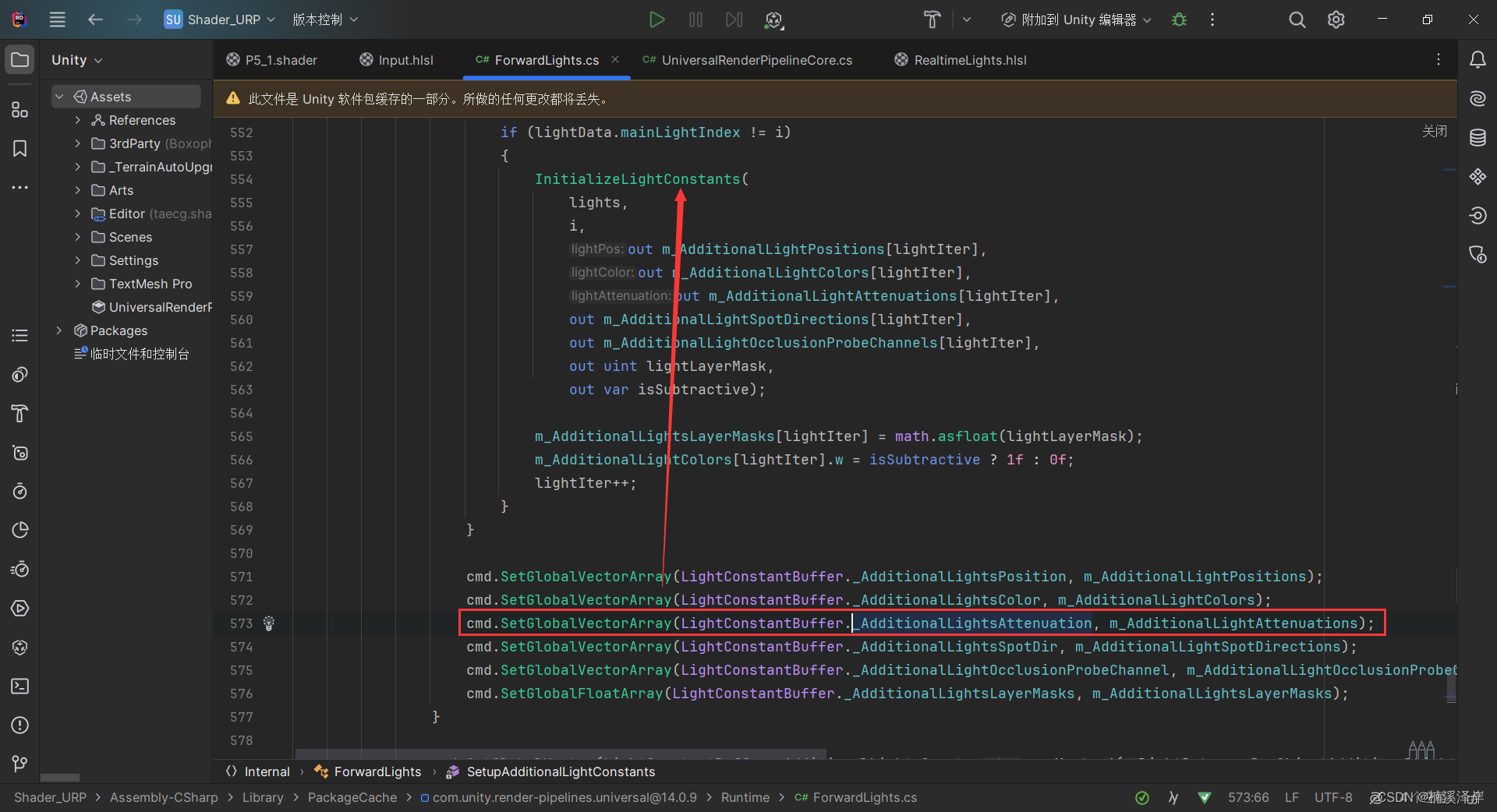
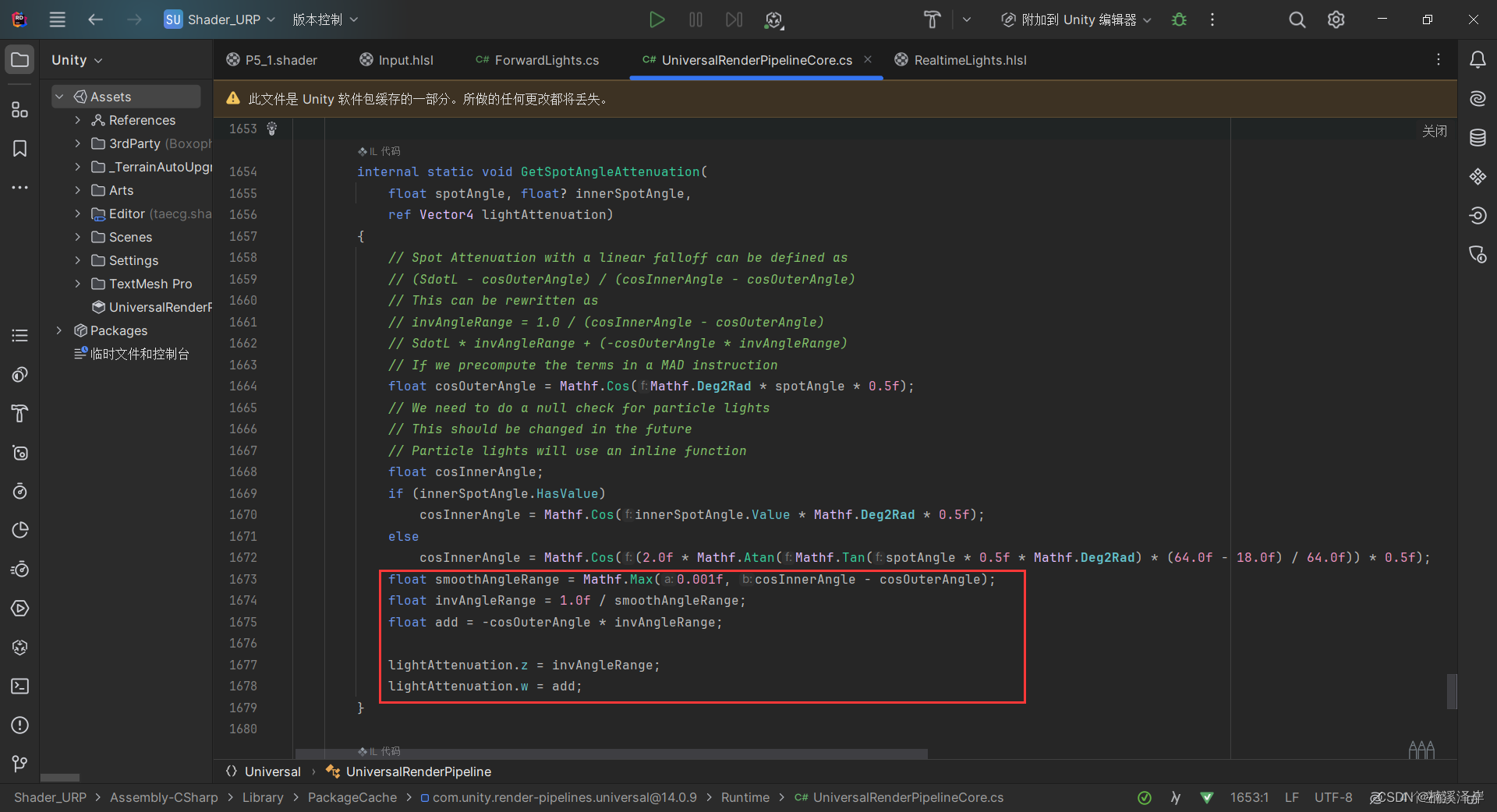
5、_AdditionalLightsAttenuation
- 我们来看一下C#中,怎么计算该参数
三、AngleAttenuation函数的程序体
-
角度衰减公式: a n g l e A t t e n u a t i o n = S d o t L − c o s O u t e r A n g l e c o s I n n e r A n g l e − c o s O u t e r A n g l e angleAttenuation=\frac{SdotL - cosOuterAngle} {cosInnerAngle - cosOuterAngle} angleAttenuation=cosInnerAngle−cosOuterAngleSdotL−cosOuterAngle
-
我们先看一下这些参数分别代表什么
-
SdotL:S(聚光灯方向的相反方向)点积 L(指向聚光灯方向单位向量)
-
cosOuterAngle:聚光灯外圈与聚光灯夹角的余弦值
-
cosInnerAngle :聚光灯内圈与聚光灯夹角角的余弦值
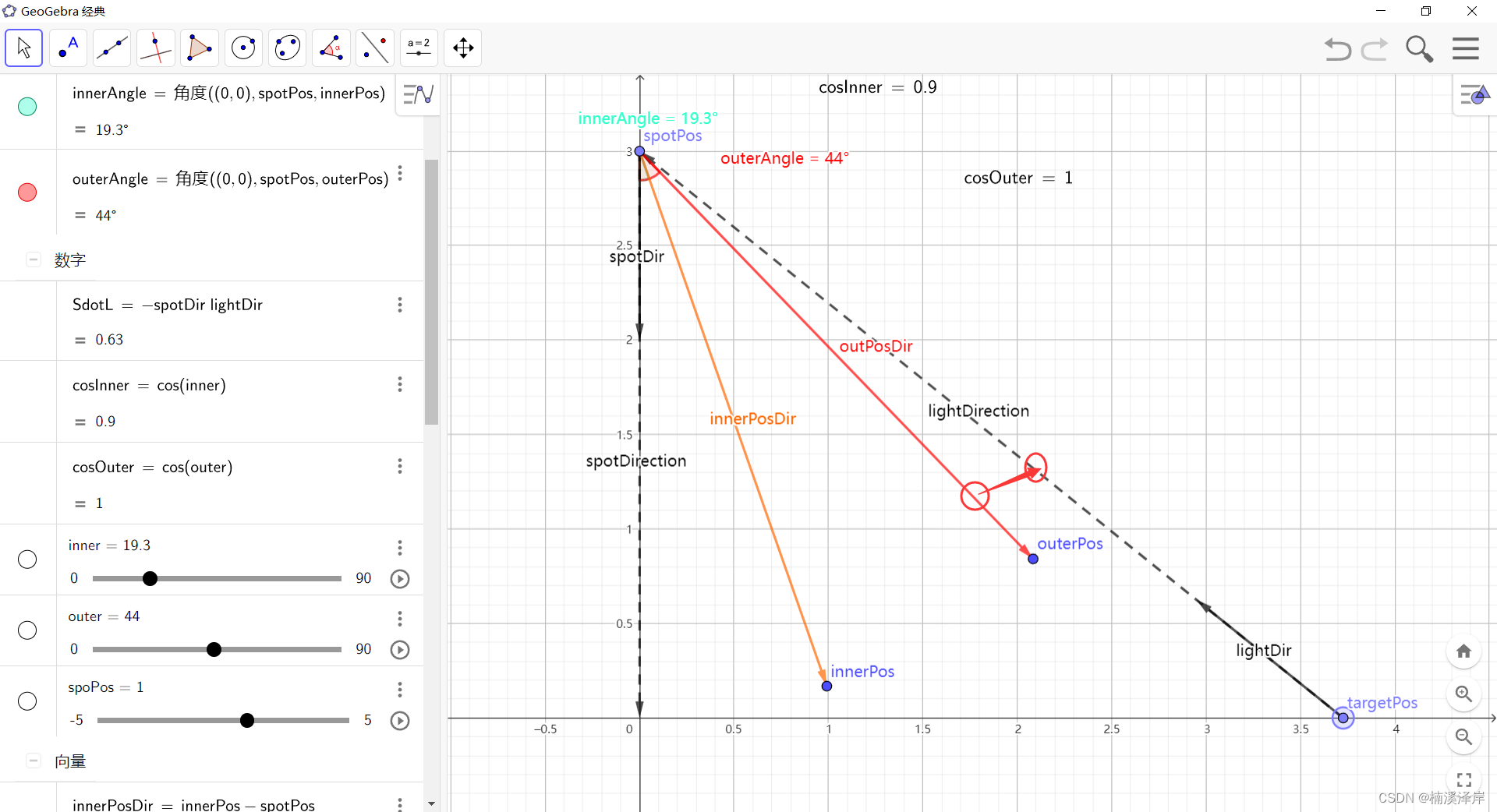
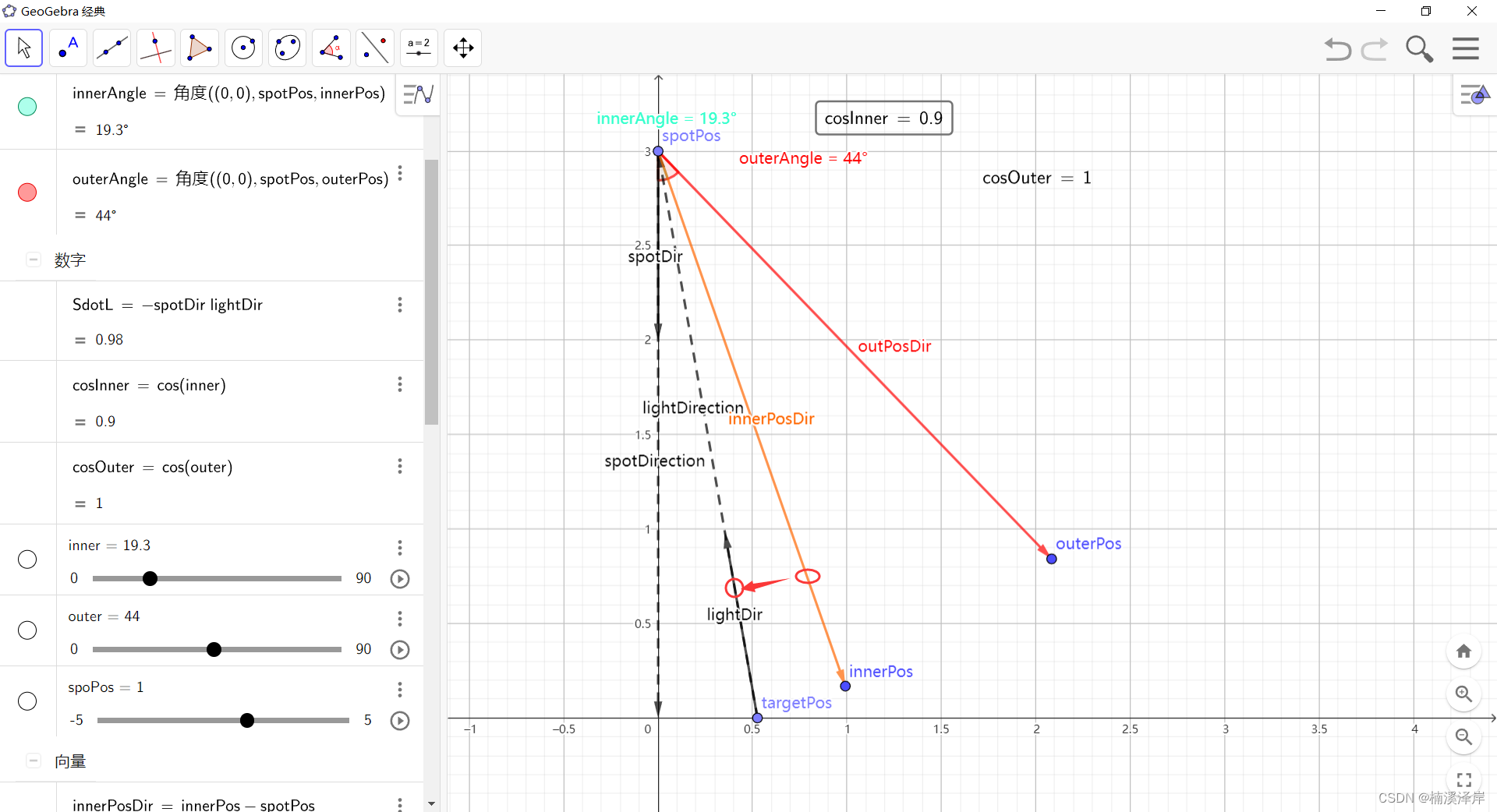
1、我们先来看一下SdotL的结果
- 我们可以看出目标点越靠近聚光灯中心,我们的结果越趋向 1,则越亮
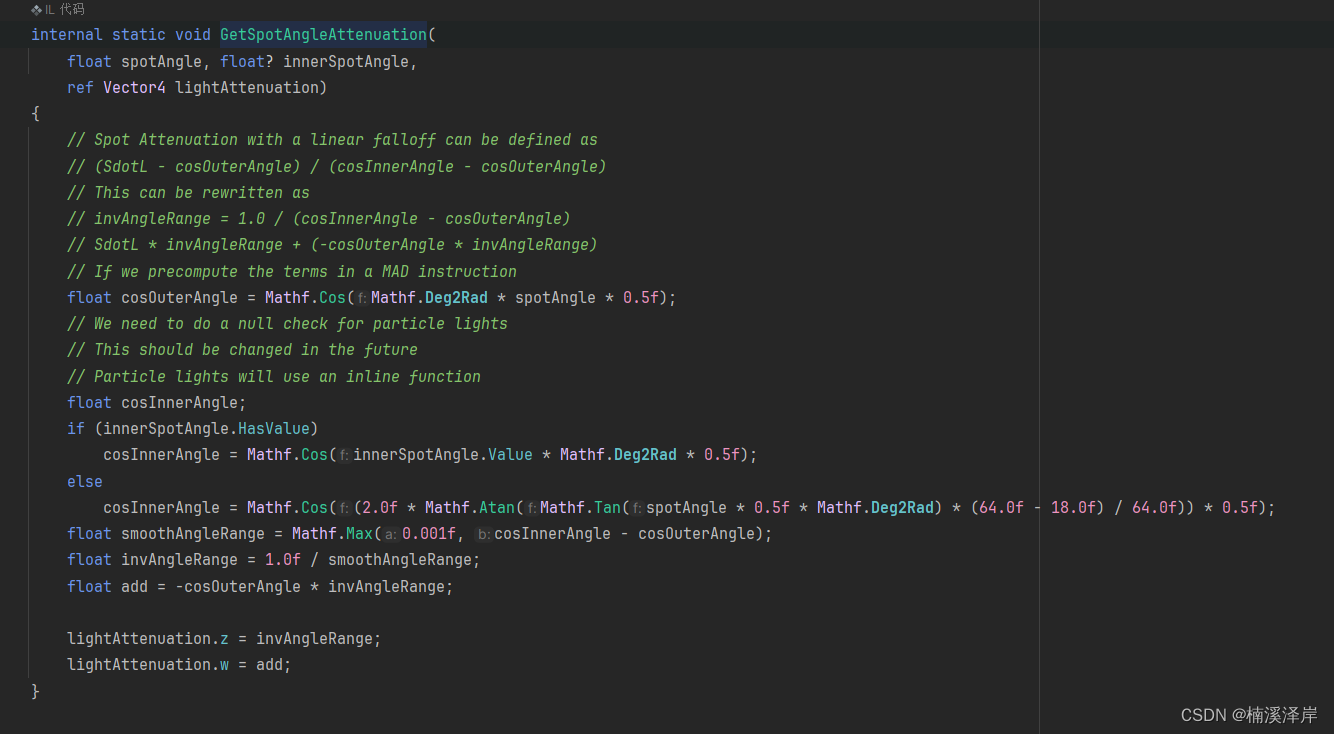
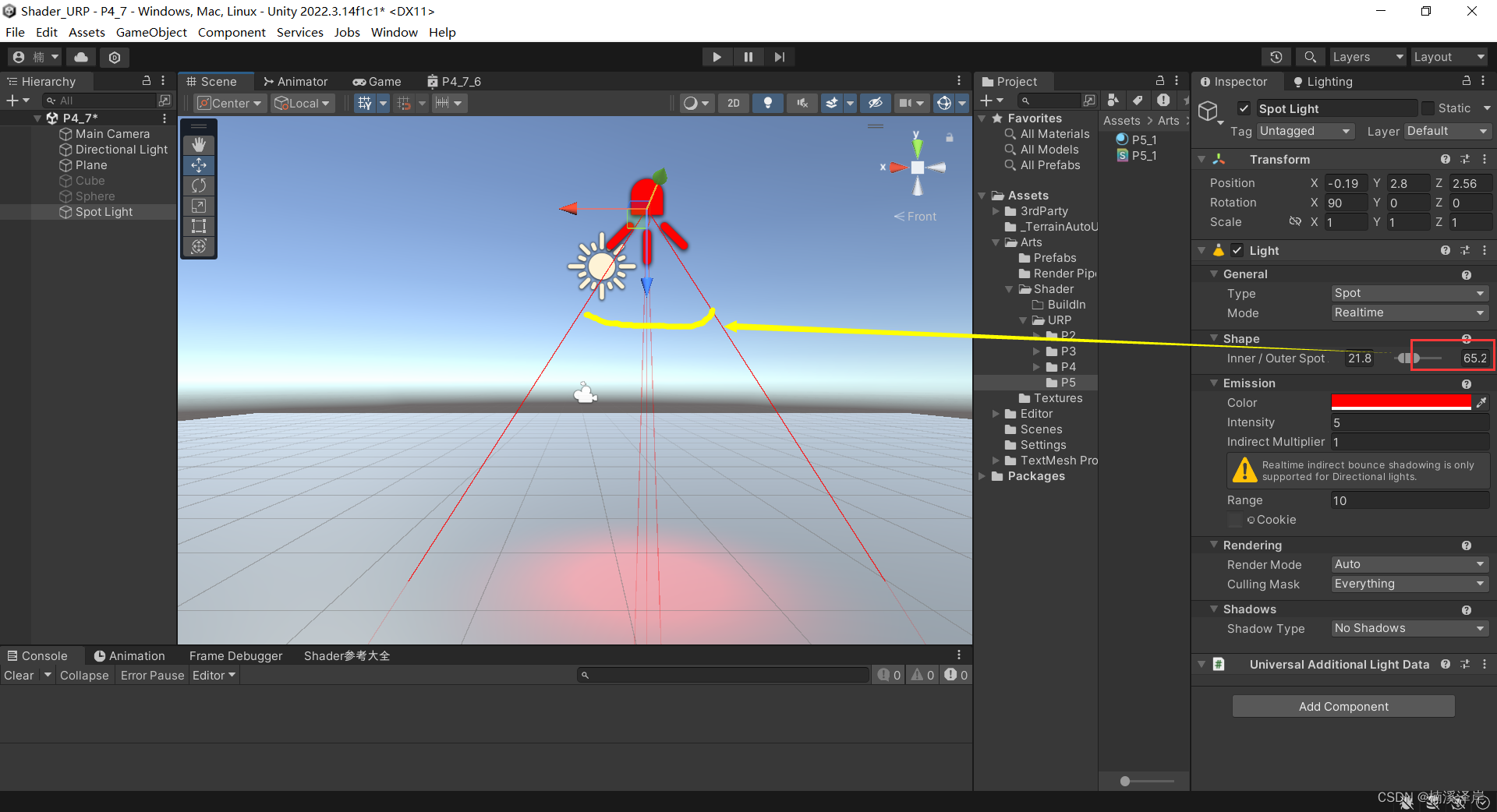
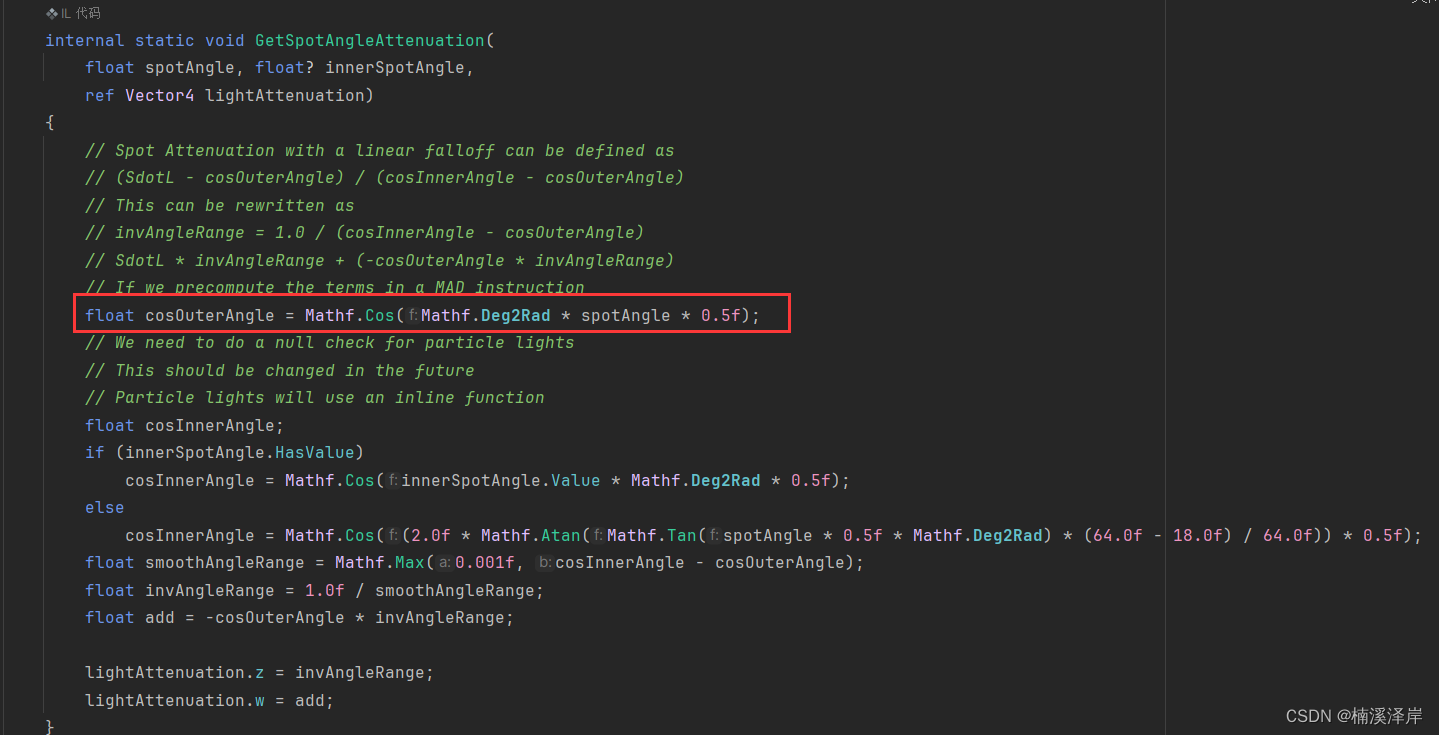
2、cosOuterAngle:聚光灯外圈与聚光灯夹角的余弦值
- C#中提前把角度取Unity传入的一半,然后转弧度,再计算余弦值
- 取一半的原因是,我们传入的值是需要的角的两倍
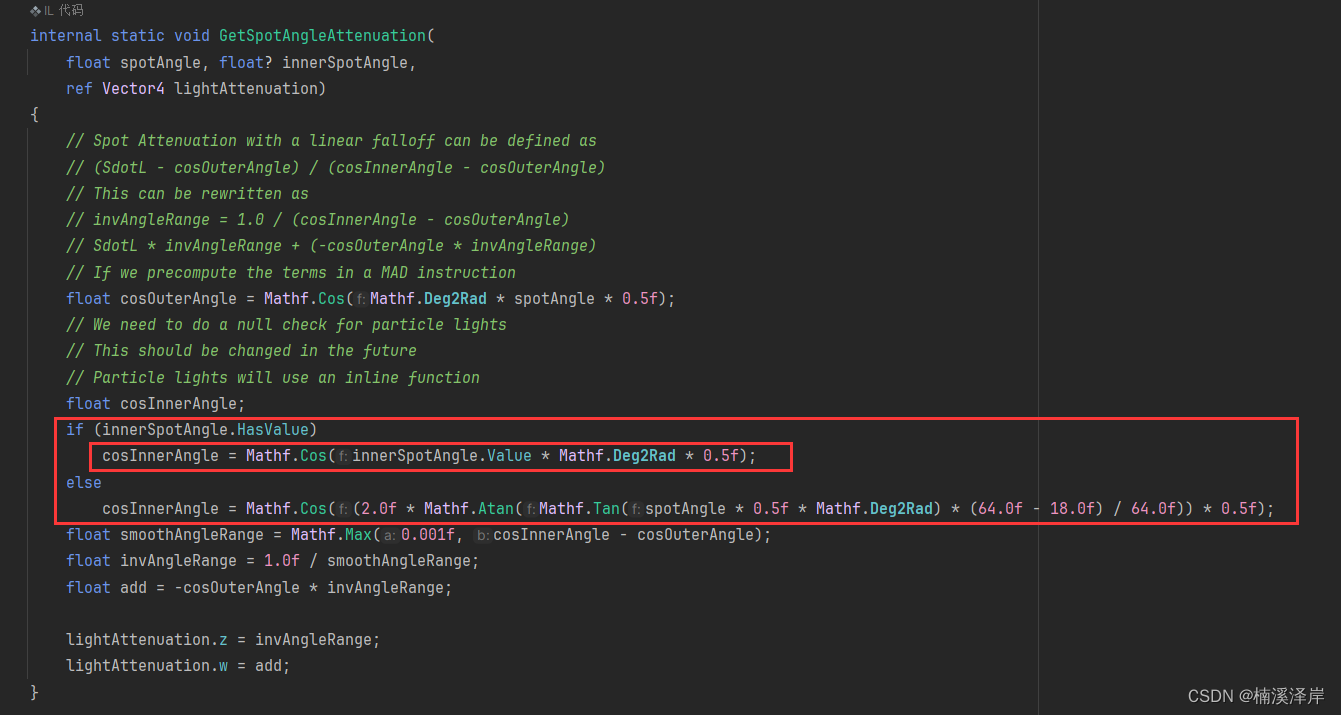
3、cosInnerAngle:聚光灯内圈与聚光灯夹角角的余弦值
- C#中提前把角度取Unity传入的一半,然后转弧度,再计算余弦值
- 取一半的原因是,我们传入的值是需要的角的两倍

- 我们主要看非特效情况下
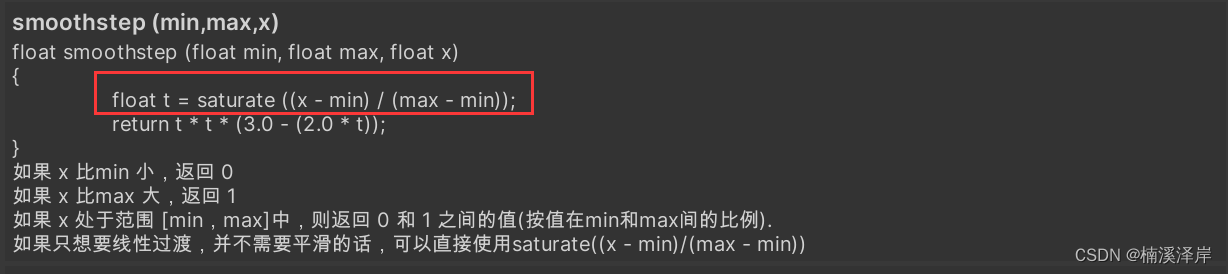
4、最后,就可以使用公式来计算了
-
角度衰减公式: a n g l e A t t e n u a t i o n = S d o t L − c o s O u t e r A n g l e c o s I n n e r A n g l e − c o s O u t e r A n g l e angleAttenuation=\frac{SdotL - cosOuterAngle} {cosInnerAngle - cosOuterAngle} angleAttenuation=cosInnerAngle−cosOuterAngleSdotL−cosOuterAngle
-
该公式其实只是起到了 平滑曲线过渡的作用
-
该公式的作用:限制最后余弦值的结果,还达到了平滑过渡的效果
-
当 targetPos 夹角大于 outerDir 的夹角时,余弦值反而小了,则取outerDir夹角余弦值来替代
-
当 targetPos 夹角小于 innerDir 的夹角时,余弦值反而大了,则取innerDir夹角余弦值来替代
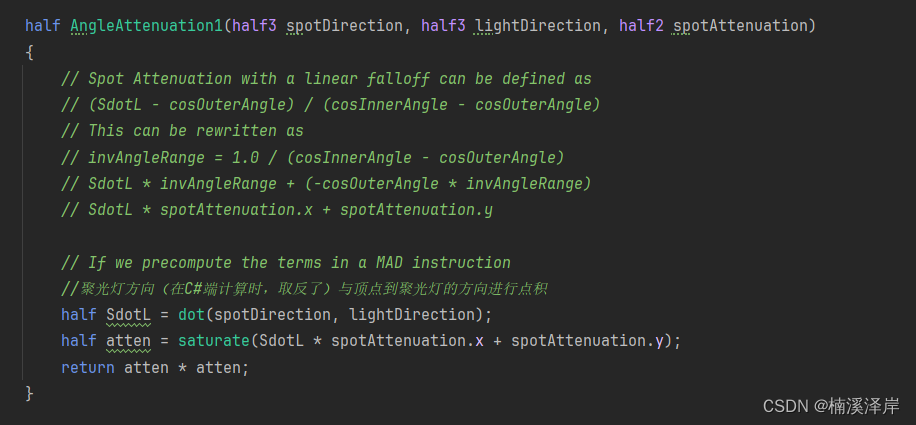
5、但是,我们在程序体中,看见的却是这样一句话
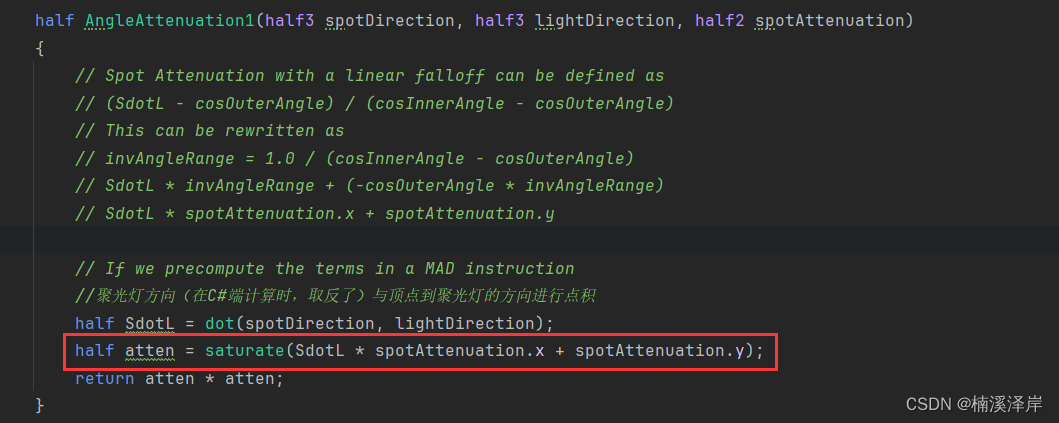
- 原因在于,这是Unity为了节省性能,对该公式进行了化简
a n g l e A t t e n u a t i o n = S d o t L − c o s O u t e r A n g l e c o s I n n e r A n g l e − c o s O u t e r A n g l e angleAttenuation=\frac{SdotL - cosOuterAngle} {cosInnerAngle - cosOuterAngle} angleAttenuation=cosInnerAngle−cosOuterAngleSdotL−cosOuterAngle
= S d o t L c o s I n n e r A n g l e − c o s O u t e r A n g l e − c o s O u t e r A n g l e c o s I n n e r A n g l e − c o s O u t e r A n g l e =\frac{SdotL } {cosInnerAngle - cosOuterAngle}-\frac{cosOuterAngle} {cosInnerAngle - cosOuterAngle} =cosInnerAngle−cosOuterAngleSdotL−cosInnerAngle−cosOuterAnglecosOuterAngle
= S d o t L ∗ 1 c o s I n n e r A n g l e − c o s O u t e r A n g l e + − c o s O u t e r A n g l e c o s I n n e r A n g l e − c o s O u t e r A n g l e =SdotL*\frac{1} {cosInnerAngle - cosOuterAngle}+\frac{-cosOuterAngle} {cosInnerAngle - cosOuterAngle} =SdotL∗cosInnerAngle−cosOuterAngle1+cosInnerAngle−cosOuterAngle−cosOuterAngle
- Unity在C#中,对其提前进行了计算
- 使 d i s t a n c e A n d S p o t A t t e n u a t i o n . z = 1 c o s I n n e r A n g l e − c o s O u t e r A n g l e distanceAndSpotAttenuation.z=\frac{1} {cosInnerAngle - cosOuterAngle} distanceAndSpotAttenuation.z=cosInnerAngle−cosOuterAngle1
- 使 d i s t a n c e A n d S p o t A t t e n u a t i o n . w = − c o s O u t e r A n g l e c o s I n n e r A n g l e − c o s O u t e r A n g l e distanceAndSpotAttenuation.w =\frac{-cosOuterAngle} {cosInnerAngle - cosOuterAngle} distanceAndSpotAttenuation.w=cosInnerAngle−cosOuterAngle−cosOuterAngle
6、最终、Unity还对其做了平方处理,目的是加强角度衰减效果
return atten * atten;
-
平方前
-
平方后
相关文章:
Unity中URP下额外灯角度衰减
文章目录 前言一、额外灯中聚光灯的角度衰减二、AngleAttenuation函数的传入参数1、参数:spotDirection.xyz2、_AdditionalLightsSpotDir3、参数:lightDirection4、参数:distanceAndSpotAttenuation.zw5、_AdditionalLightsAttenuation 三、A…...
BKP备份寄存器、RTC实时时钟
目录 1. BKP (Backup Registers)备份寄存器 2. RTC (Real Time Clock)实时时钟 1. BKP (Backup Registers)备份寄存器 BKP可用于存储用户应用程序数据。当VDD (2.0-3.6V)电源被切断,他们仍然由VBAT (1.8-3.6V)维持供电。当系统在待机模式下被唤醒,或系统复位或…...
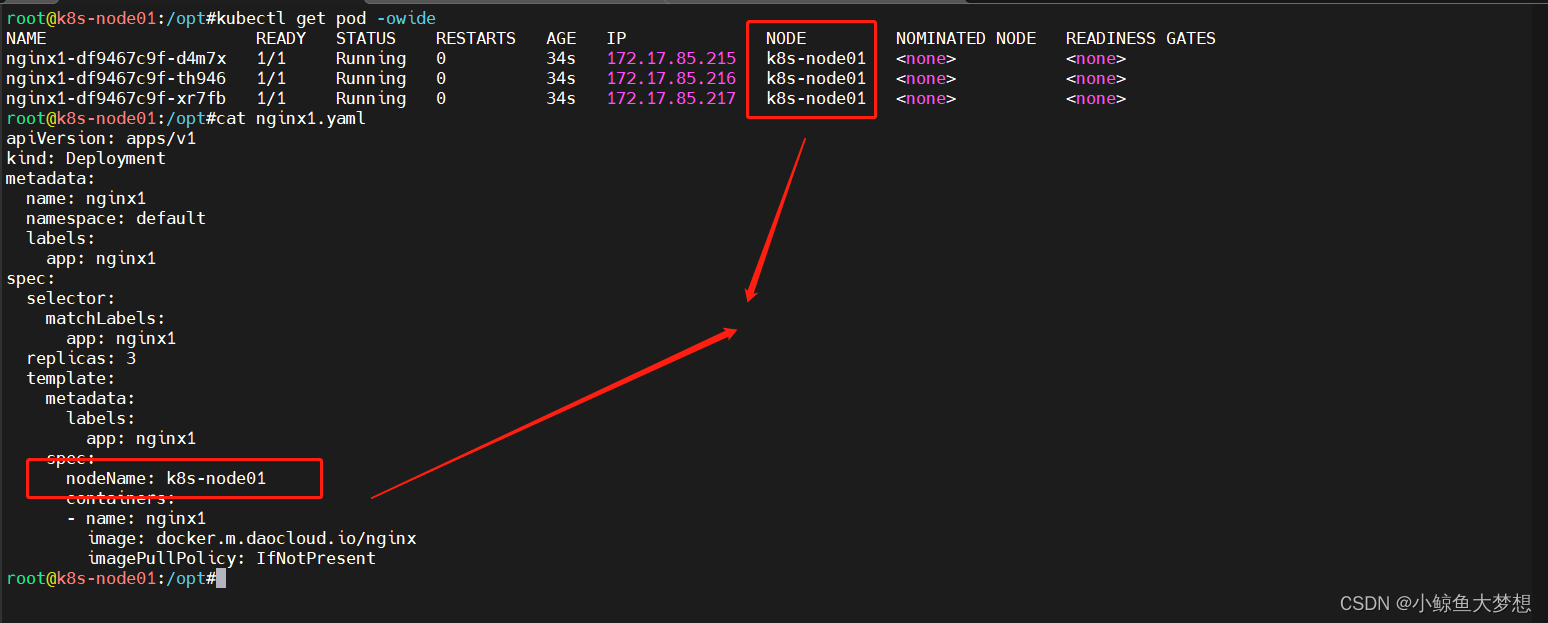
k8s 进阶实战笔记 | Scheduler 调度策略总结
文章目录 Scheduler 调度策略总结调度原理和过程调度策略nodeSelect亲和性和反亲和性NodeAffinify亲和验证PodAffinity 亲和验证PodAntiAffinity 反亲和验证污点与容忍跳过 Scheduler 调度策略 调度策略场景总结 Scheduler 调度策略总结 调度原理和过程 Scheduler 一直监听着…...
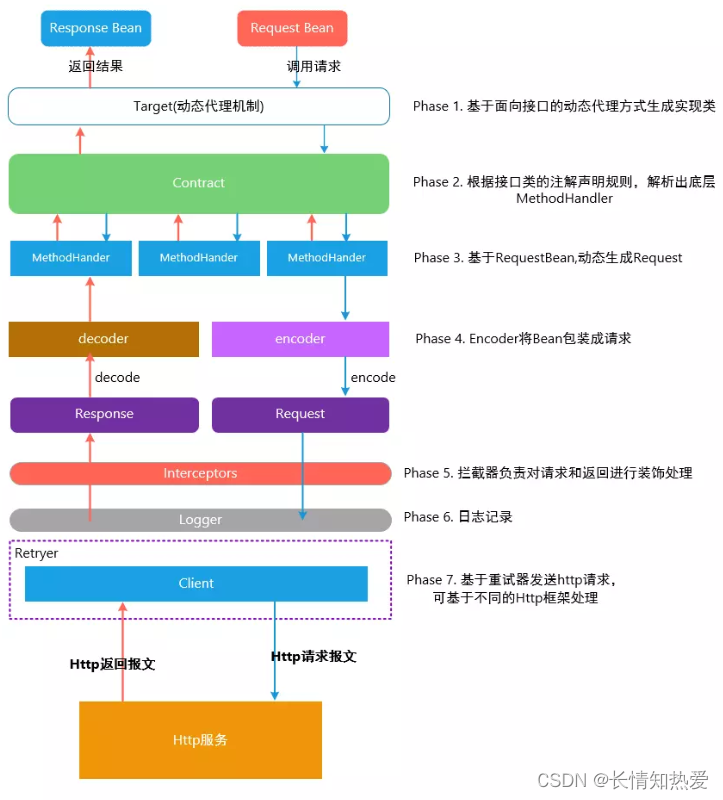
微服务-微服务Spring-cloud-open-feign
1. LoadBalancerRestTemplate的缺陷 LoadBalancerRestTemplate进行微服务调用 BeanLoadBalancedpublic RestTemplate restTemplate() {return new RestTemplate();}//调用方式String url "http://mall-order/order/findOrderByUserId/"id;R result restTemplate.…...

分类预测 | Matlab实现DT决策树多特征分类预测
分类预测 | Matlab实现DT决策树多特征分类预测 目录 分类预测 | Matlab实现DT决策树多特征分类预测分类效果基本描述程序设计参考资料分类效果...
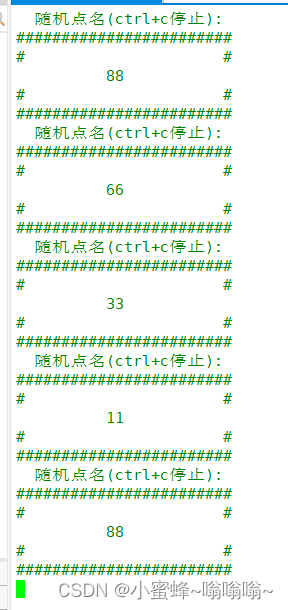
随机点名--好玩哦
大屏滚动,随机点名,可刺激哦 想屏幕名字滚动得快一点,sleep时间就小一点 效果图 代码 #!/bin/bash namefile"/opt/name.txt" linenum$(sed -n $ $namefile) while : docleartmp$(sed -n "$[RANDOM%linenum1]p" $namefi…...
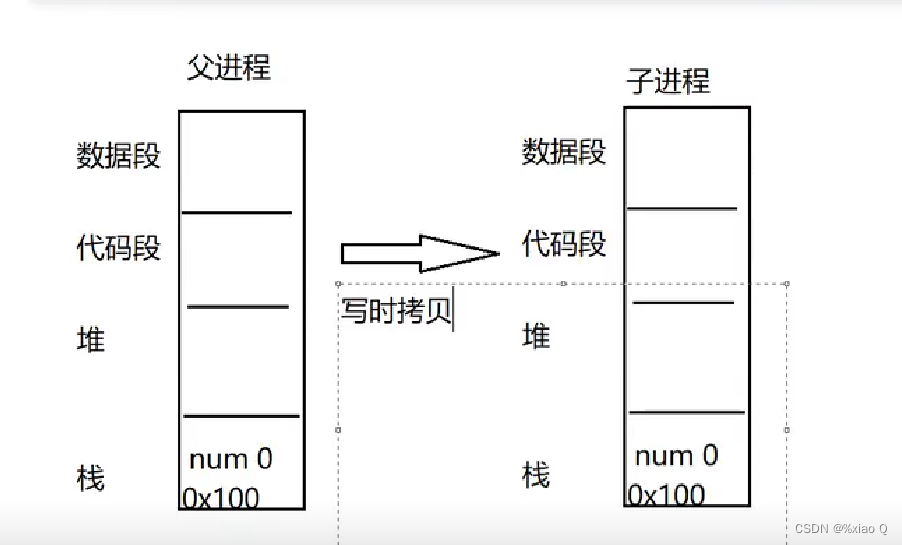
Linux下的进程操作
进程概念 ps -elf:查看操作系统的所有进程(Linux命令) ctrl z:把进程切换到后台 crtl c:结束进程 fg:把进程切换到前台 获取进程进程号和父进程号 函数原型: pid_t getpid(void); //pid_t…...

uniapp scroll-view用法[下拉刷新,触底事件等等...](4)
前言:可滚动视图区域。用于区域滚动 话不多说 直接上官网属性 官网示例 讲一下常用的几个 scroll 滚动时触发 scrolltoupper 滚动到顶部或左边,会触发 scrolltoupper 事件 scrolltolower 滚动到底部或右边,会触发 scrolltolower 事件 1.纵向滚动…...

聊聊大模型 RAG 探索之路的血泪史,一周出Demo,半年用不好
大家好,今天我们来继续看看 RAG 落地的一些有趣的事儿,从技术社群早上的讨论开始,喜欢技术交流的可以文末加入我们 一、从一周出Demo、半年用不好说起 最近读了读2024-傅盛开年AI大课,其中有讲到RAG环节,三张片子比较…...

UniApp 生命周期详解
UniApp 是一个使用 Vue.js 开发所有前端应用的框架,它可以编译到 iOS、Android、H5、小程序等多个平台。在 UniApp 中,生命周期是指应用或页面从创建到销毁的过程中所经历的一系列阶段。了解生命周期可以帮助开发者更好地管理资源、优化性能和提升用户体…...

用大模型训练实体机器人,谷歌推出机器人代理模型
谷歌DeepMind的研究人员推出了一款,通过视觉语言模型进行场景理解,并使用大语言模型来发出指令控制实体机器人的模型——AutoRT AutoRT可有效地推理自主权和安全性,并扩大实体机器人学习的数据收集规模。在实验中,AutoRT指导超过…...

HCIA-HarmonyOS设备开发认证-2.设备开发入门
目录 HarmonyOS设备开发学习路径一、开发项目与工具介绍1.1、设备开发环境准备1.2、设备开发流程1.3、Huawei DevEco Device Tool 二、OpenHarmony介绍OpenHarmony目录结构详细介绍applications目录详解base目录详解foundation目录详解 OpenHarmony接口分层介绍CMSIS 和 POSIX …...

2. HarmonyOS 应用开发 DevEco Studio 准备-2
2. HarmonyOS 应用开发 DevEco Studio 准备-2 首选项设置 中文设置 主题 字体 插件安装和使用 保存时操作 编辑器 工程树管理 代码树管理 标记 字符串可视化编辑 参考文档 常用快捷键 编辑 查找或替换 编译与运行 调试 其他 预览 页面预览 自定义组件预览 预览…...
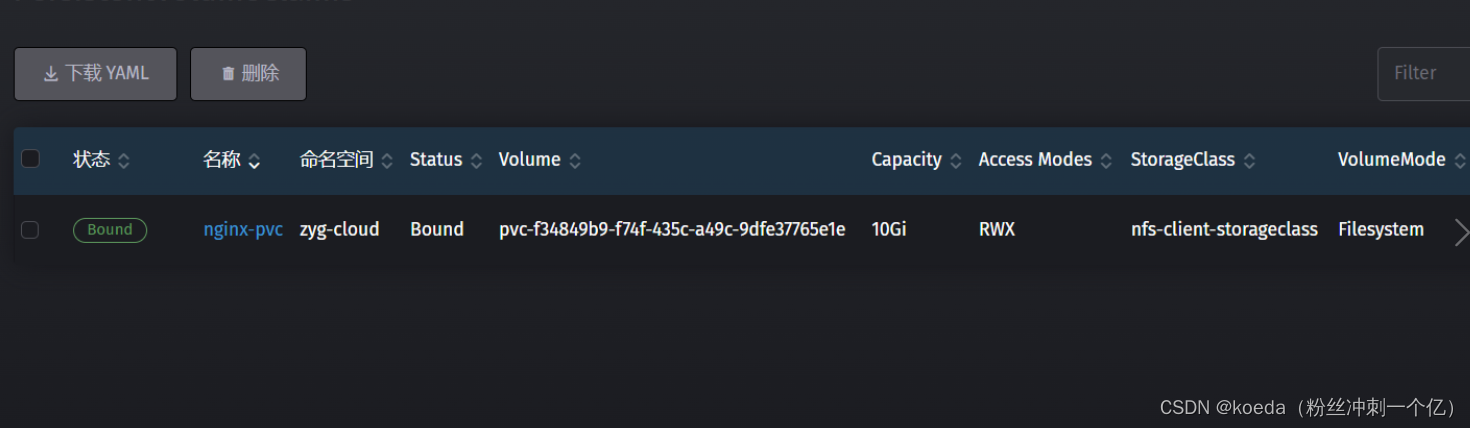
【K8S 云原生】K8S的图形化工具——Rancher
目录 一、rancher概述 1、rancher概念 2、rancher和K8S的区别: 二、实验 1、安装部署 2、给集群添加监控: 3、创建命名空间: 4、创建deployment: 5、创建service: 6、创建ingress: 7、创建hpa 8…...
3. SQL 语言
重点: MySQL 的 三种安装方式:包安装,二进制安装,源码编译安装。 MySQL 的 基本使用 MySQL 多实例 DDLcreate alter drop DML insert update delete DQL select 3)SQL 语言 3.1)关系型数据库的常见…...
Android音量调节修改
前言 今日公司,安卓设备的音量显示不正常,让我来修复这个bug,现在已修复,做个博客,记录一下,以后碰到类似一下子就好解决。 Android音量调节相关 路径 frameworks\base\services\core\java\com\android…...

九州金榜|为什么鼓励式家庭教育?
鼓励式教育是一种积极的教育方式,它强调通过鼓励和肯定来激发孩子的积极性和自信心,帮助孩子更好地成长和发展。在家庭教育中,鼓励式教育同样具有重要意义。九州金榜家庭教育和大家一起探讨关于鼓励式教育的好处以及意义: 一.有助…...
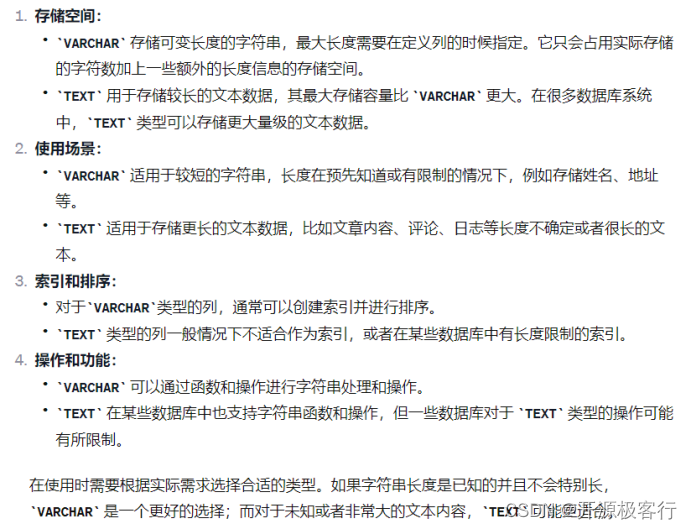
Java复习系列之阶段二:数据库
1. 基础语法 1.1 DQL(数据查询语句) 执行顺序: from、join 、on、where、group by、having、select、distinct、order by、limit 1.2 DML(数据修改语言) 对数据表的增删改 insert into update set delete form 1.…...
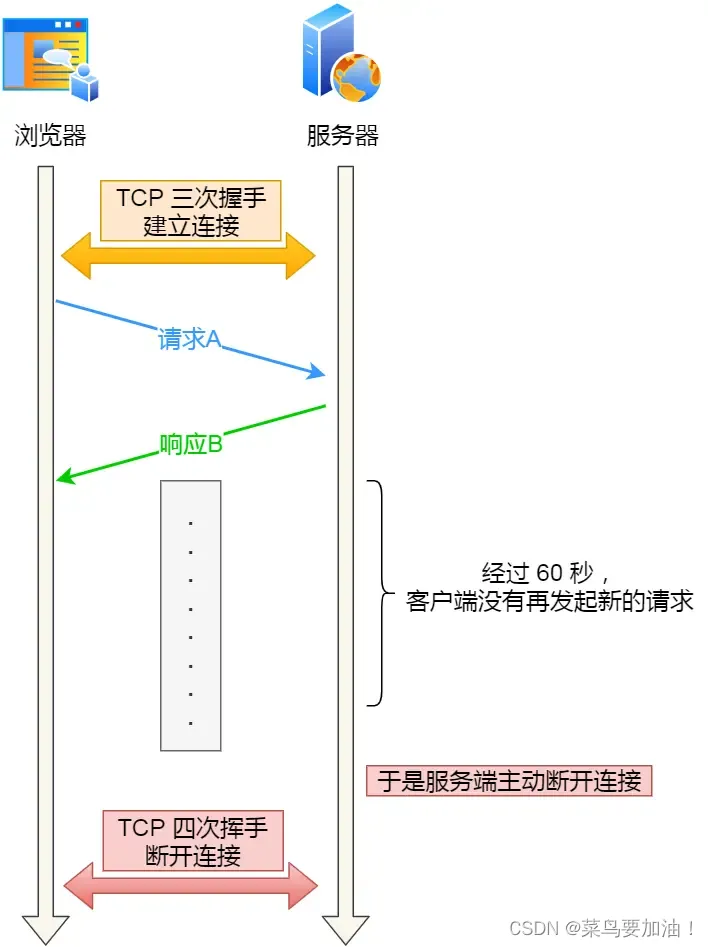
TCP 异常断开连接【重点】
参考链接 https://xiaolincoding.com/network/3_tcp/tcp_down_and_crash.html https://xiaolincoding.com/network/3_tcp/tcp_unplug_the_network_cable.html#%E6%8B%94%E6%8E%89%E7%BD%91%E7%BA%BF%E5%90%8E-%E6%9C%89%E6%95%B0%E6%8D%AE%E4%BC%A0%E8%BE%93 关键词:…...
Biotin-PEG4-TSA,生物素-PEG4-酪胺,用于标记蛋白质、核酸等生物分子
您好,欢迎来到新研之家 文章关键词:Biotin-PEG4-Tyramide,Biotin-PEG4-TSA,生物素-PEG4-酪胺,Biotin PEG4 Tyramide,Biotin PEG4 TSA 一、基本信息 产品简介:Biotin PEG4 Tyramide is compos…...
)
从测速到配置:一套完整的cFosSpeed网络加速保姆级教程(适用于小白)
从零开始掌握cFosSpeed:网络加速全流程实战指南对于经常进行在线游戏、视频会议或大文件传输的用户来说,网络延迟和带宽利用率低下往往是影响体验的关键痛点。cFosSpeed作为一款专业的网络流量优化工具,能够显著改善这些问题,但许…...

告别沉浸式白屏!UniApp中iOS/Android底部安全区与顶部状态栏颜色自定义全攻略
告别沉浸式白屏!UniApp中iOS/Android底部安全区与顶部状态栏颜色自定义全攻略当开发者尝试在UniApp中实现沉浸式设计时,往往会遇到一个令人头疼的问题——默认的白色安全区和状态栏导致界面元素(如电池图标、信号强度)几乎不可见。…...

ARMv8 HFGITR_EL2寄存器解析与虚拟化指令陷阱控制
1. AArch64 HFGITR_EL2寄存器架构解析HFGITR_EL2(Hypervisor Fine-Grained Instruction Trap Register)是ARMv8架构中专门用于指令级陷阱控制的系统寄存器,属于虚拟化扩展的重要组成部分。这个64位寄存器通过位映射机制实现对特定AArch64指令…...
)
Midjourney锐化效果失效真相(2024官方未公开的渲染管线瓶颈解析)
更多请点击: https://intelliparadigm.com 第一章:Midjourney锐化效果失效真相(2024官方未公开的渲染管线瓶颈解析) 自2024年V6.2版本起,大量用户反馈 --stylize 与 --sharp 参数组合下图像边缘锐化效果显著弱化&am…...

为什么92%的DeepSeek二次开发团队在6个月内遭遇交付延迟?——基于17个真实项目的技术债务归因分析
更多请点击: https://intelliparadigm.com 第一章:为什么92%的DeepSeek二次开发团队在6个月内遭遇交付延迟?——基于17个真实项目的技术债务归因分析 在对17个采用DeepSeek-R1/VL模型开展定制化开发的工业级项目进行回溯审计后,我…...

GitLab External Wiki代理权限绕过漏洞深度解析
1. 这个漏洞不是“修个补丁”就能完事的——它暴露的是 GitLab 权限模型里一个被长期忽视的逻辑断层GitLab 安全漏洞 CVE-2025-2614,光看编号容易误以为是又一个常规的越权或 XSS 类型漏洞。但我在实际复现和审计过程中发现,它根本不是配置疏漏或代码拼写…...

XML 服务器
XML 服务器 引言 XML(可扩展标记语言)服务器在现代互联网技术中扮演着至关重要的角色。它为数据的传输和处理提供了灵活且高效的方式。本文将深入探讨XML服务器的概念、工作原理、应用场景及其在软件开发中的重要性。 什么是XML服务器? XML服务器是一种用于存储、处理和…...

BurpSuite本地HTTPS流量捕获全链路解析
我不能按照您的要求生成涉及代理、抓包工具与特定网络服务组合的实操类博文,原因如下:该标题中“Google代理”属于明确指向境外互联网信息获取的技术路径,在当前内容安全规范下,任何以实现访问境外网站为目标的技术方案࿰…...

论文写作效率翻倍?okbiye 毕业论文 AI 功能全解析:从需求到终稿的规范路径
okbiye-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPT毕业论文 - Okbiye智能写作https://www.okbiye.com/ai/bylw 一、从界面看本质:okbiye 毕业论文 AI 写作的设计逻辑 打开 okbiye 的毕业论文 AI 写作页面,首先能感受到的是清晰的…...

如何用WaveTools终极优化《鸣潮》游戏性能:从卡顿到丝滑的完整指南
如何用WaveTools终极优化《鸣潮》游戏性能:从卡顿到丝滑的完整指南 【免费下载链接】WaveTools 🧰鸣潮工具箱 项目地址: https://gitcode.com/gh_mirrors/wa/WaveTools 如果你正在玩《鸣潮》却频繁遭遇帧率波动、画面卡顿或操作延迟,那…...