STM32-GPIO输出(HAL库)
STM32-GPIO
介绍
什么是GPIO?
GPIO(通用输入/输出)是一种用于与外部设备进行数字通信的通用硬件接口。它允许微控制器或其他数字电路的引脚以灵活的方式配置为输入或输出,并在运行时进行动态控制。GPIO可用于连接和控制各种外围设备,如LED、按钮、传感器、显示器、通信设备等。
GPIO模式
GPIO引脚的工作可以配置为输入还是输出,以及其他相关的特性。STM32微控制器提供了多个寄存器来配置每个GPIO引脚的工作模式,包括MODER(模式寄存器)、OTYPER(输出类型寄存器)、OSPEEDR(输出速度寄存器)、PUPDR(上拉/下拉寄存器)等。
以STM32F407为例,它的5 V 容忍 I/O 端口位的基本结构如下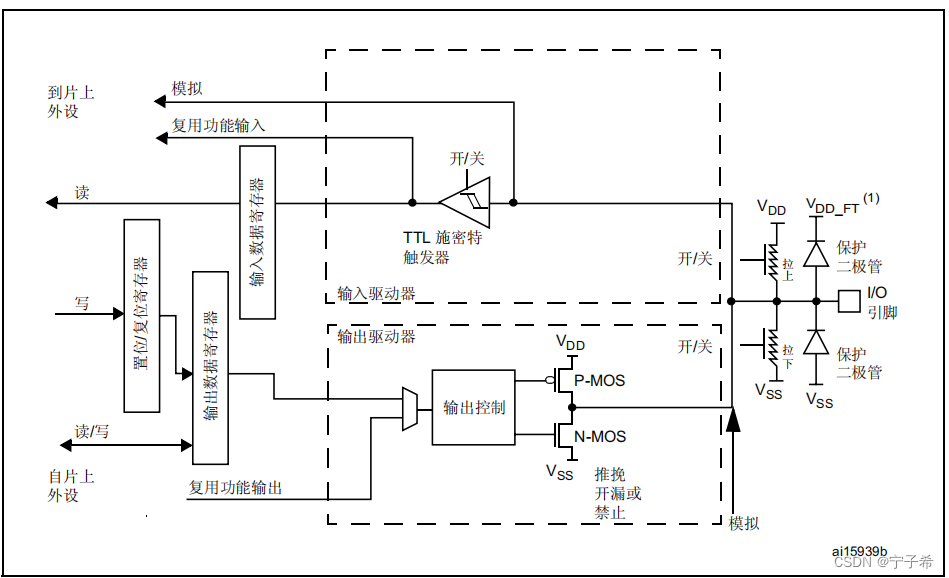
以下是STM32的GPIO引脚的几种基本模式:
-
输入模式 (Input Mode):
- Analog Mode(模拟模式): 用于连接模拟传感器。
- Floating Input(浮空输入): 没有内部上拉或下拉电阻,需要外部电路提供电平。
- Pull-up / Pull-down(上拉/下拉输入): 配置内部上拉或下拉电阻,用于消除浮空输入的不确定性。
-
输出模式 (Output Mode):
- Push-Pull Output(推挽输出): 可以提供高电平和低电平输出。
- Open-Drain Output(开漏输出): 用于连接多个设备,需要外部上拉电阻来提供高电平。
- Push-Pull with Pull-up/Pull-down(推挽输出带上拉/下拉): 输出高电平或低电平时,同时配置上拉或下拉电阻。
常用API
在使用STM32的HAL库进行GPIO输入输出配置时,主要使用的API包括HAL_GPIO_Init、HAL_GPIO_DeInit、HAL_GPIO_WritePin、HAL_GPIO_ReadPin等。
-
HAL_GPIO_Init函数:HAL_StatusTypeDef HAL_GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_Init);用于初始化指定的GPIO引脚。其中,
GPIOx是指定的GPIO端口(如GPIOA、GPIOB等),GPIO_Init是一个结构体,包含了GPIO引脚的配置信息(如模式、速度、上拉下拉等)。例如,将PA5配置为推挽输出:
GPIO_InitTypeDef GPIO_InitStruct = {0}; GPIO_InitStruct.Pin = GPIO_PIN_5; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽输出 GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_MEDIUM; HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); -
HAL_GPIO_DeInit函数:void HAL_GPIO_DeInit(GPIO_TypeDef* GPIOx, uint32_t GPIO_Pin);用于反初始化指定的GPIO引脚。其中,
GPIOx是指定的GPIO端口,GPIO_Pin是指定的GPIO引脚。例如,反初始化PA5引脚:
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_5); -
HAL_GPIO_WritePin函数:void HAL_GPIO_WritePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState);用于设置指定的GPIO引脚的输出状态。其中,
GPIOx是指定的GPIO端口,GPIO_Pin是指定的GPIO引脚,PinState是要设置的状态(GPIO_PIN_SET表示高电平,GPIO_PIN_RESET表示低电平)。例如,将PA5设置为高电平:
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET); -
HAL_GPIO_ReadPin函数:GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);用于读取指定GPIO引脚的输入状态。其中,
GPIOx是指定的GPIO端口,GPIO_Pin是指定的GPIO引脚。例如,读取PA5引脚的状态:
GPIO_PinState state = HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_5);
项目实训
点亮一颗led
STM32F407芯片连接了一个LED到PA5引脚
#include "stm32f4xx_hal.h"void SystemClock_Config(void);
static void GPIO_Init(void);int main(void) {// 初始化HAL库HAL_Init();// 配置系统时钟SystemClock_Config();// 初始化GPIOGPIO_Init();while (1) {// 点亮LEDHAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET);// 延时HAL_Delay(1000);// 关闭LEDHAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET);// 延时HAL_Delay(1000);}
}// 系统时钟配置函数,使用HAL库的CubeMX生成的代码
void SystemClock_Config(void) {RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};__HAL_RCC_PWR_CLK_ENABLE();__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_OFF;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLM = 8;RCC_OscInitStruct.PLL.PLLN = 336;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;RCC_OscInitStruct.PLL.PLLQ = 4;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) {Error_Handler();}RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK) {Error_Handler();}
}// GPIO初始化函数
static void GPIO_Init(void) {// 启用GPIOA时钟__HAL_RCC_GPIOA_CLK_ENABLE();// 初始化PA5引脚为推挽输出GPIO_InitTypeDef GPIO_InitStruct = {0};GPIO_InitStruct.Pin = GPIO_PIN_5;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_MEDIUM;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);// 初始化引脚状态为低电平HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET);
}按键控制LED亮灭
假设按键连接到PA0引脚,LED连接到PA5引脚
#include "stm32f4xx_hal.h"void SystemClock_Config(void);
static void GPIO_Init(void);int main(void) {// 初始化HAL库HAL_Init();// 配置系统时钟SystemClock_Config();// 初始化GPIOGPIO_Init();while (1) {// 读取按键状态if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_SET) {// 按键按下,点亮LEDHAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET);} else {// 按键未按下,关闭LEDHAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET);}}
}// 系统时钟配置函数,使用HAL库的CubeMX生成的代码
void SystemClock_Config(void) {RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};__HAL_RCC_PWR_CLK_ENABLE();__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_OFF;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLM = 8;RCC_OscInitStruct.PLL.PLLN = 336;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;RCC_OscInitStruct.PLL.PLLQ = 4;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) {Error_Handler();}RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK) {Error_Handler();}
}// GPIO初始化函数
static void GPIO_Init(void) {// 启用GPIOA时钟__HAL_RCC_GPIOA_CLK_ENABLE();// 初始化PA0引脚为上拉输入(按键连接到地,按下时引脚电平为低)GPIO_InitTypeDef GPIO_InitStruct = {0};GPIO_InitStruct.Pin = GPIO_PIN_0;GPIO_InitStruct.Mode = GPIO_MODE_INPUT;GPIO_InitStruct.Pull = GPIO_PULLUP;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);// 初始化PA5引脚为推挽输出GPIO_InitStruct.Pin = GPIO_PIN_5;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_MEDIUM;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);// 初始化引脚状态为低电平HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET);
}// 错误处理函数
void Error_Handler(void) {while (1) {// 程序错误时停在这里}
}相关文章:
STM32-GPIO输出(HAL库)
STM32-GPIO 介绍 什么是GPIO? GPIO(通用输入/输出)是一种用于与外部设备进行数字通信的通用硬件接口。它允许微控制器或其他数字电路的引脚以灵活的方式配置为输入或输出,并在运行时进行动态控制。GPIO可用于连接和控制各种外围…...

倒计时80天
1.J-兔子不会种树_浙江机电职业技术学院第八届新生亮相赛(同步赛) (nowcoder.com) /****** __----~~~~~~~~~~~------___* . . ~~//...... __--~ ~~…...
PBM模型参数详解
本专栏着重讲解PBM学习所得,学习笔记、心得,并附有视频素材资料,视频详细目录如下: PBM相关参数解释1PBM相关参数解释2PBM相关案例实践1PBM相关案例实践2PBM相关案例实践2PBM相关案例实践3PBM多相流中次相界面设置1PBM多相流中次…...
贪吃蛇/链表实现(C/C++)
本篇使用C语言实现贪吃蛇小游戏,我们将其分为了三个大部分,第一个部分游戏开始GameStart,游戏运行GameRun,以及游戏结束GameRun。对于整体游戏主要思想是基于链表实现,但若仅仅只有C语言的知识还不够,我们还…...
)
Qlik Sense : IntervalMatch(离散匹配)
什么是IntervalMatch IntervalMatch 前缀用于创建表格以便将离散数值与一个或多个数值间隔进行匹配,并且任选匹配一个或多个额外关键值。 语法: IntervalMatch (matchfield)(loadstatement | selectstatement ) IntervalMatch (matchfield,keyfield…...
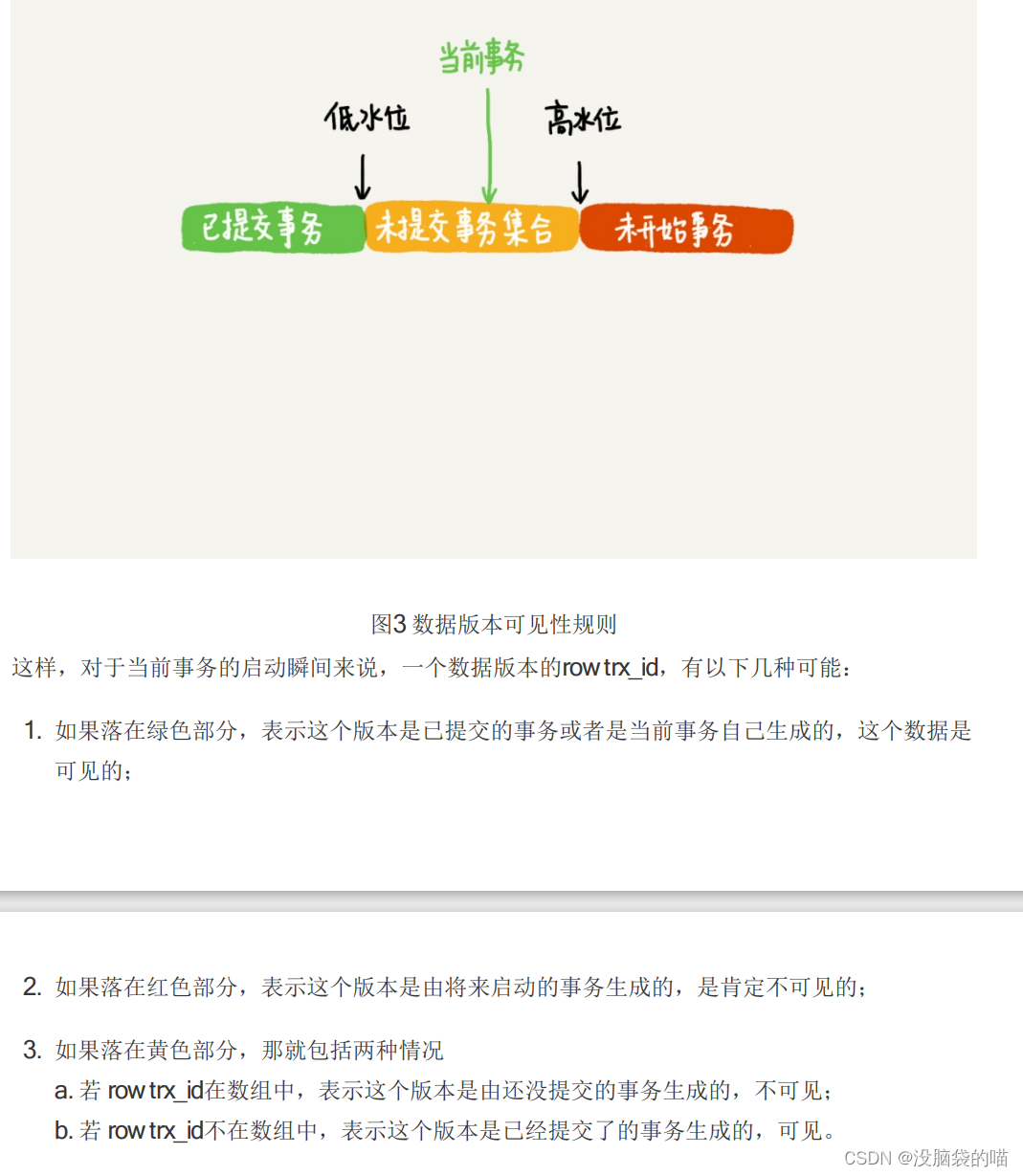
MySql45讲-08.事务到底是隔离的还是不隔离的?(结合MVCC视频)
命令的启动时机 begin/start transaction 命令并不是一个事务的起点,在执行到它们之后的第一个操作InnoDB表的语句,事务才真正启动。如果你想要马上启动一个事务,可以使用start transaction with consistent snapshot 这个命令。 事务的版本…...

备战蓝桥杯----数据结构及STL应用(基础2)
上次我们讲了vector的大致内容,接下来让我们讲一下栈,队列吧! 什么是栈呢? 很简单,我们用的羽毛球桶就是,我们取的球,是最后放的,栈是一种先进后出的数据结构。 方法函数 s.push(…...
日常学习之:vue + django + docker + heroku 对后端项目 / 前后端整体项目进行部署
文章目录 使用 docker 在 heroku 上单独部署 vue 前端使用 docker 在 heroku 上单独部署 django 后端创建 heroku 项目构建 Dockerfile设置 settings.pydatabase静态文件管理安全设置applicaiton & 中间件配置 设置 requirements.txtheroku container 部署应用 前后端分别部…...

LangGraph:一个基于LangChain构建的AI库,用于创建具有状态、多参与者的应用程序
每周跟踪AI热点新闻动向和震撼发展 想要探索生成式人工智能的前沿进展吗?订阅我们的简报,深入解析最新的技术突破、实际应用案例和未来的趋势。与全球数同行一同,从行业内部的深度分析和实用指南中受益。不要错过这个机会,成为AI领…...

04-Nacos-服务注册基于spring boot实现
官方参考 在不依赖spring cloud 组件基础上,单独的微服务项目,实现nacos接入 1、依赖文件pom.xml <dependency><groupId>com.alibaba.boot</groupId><artifactId>nacos-discovery-spring-boot-starter</artifactId><…...

iOS 闭包和Block的区别
iOS 闭包和Block的区别 原文地址: mob64ca12eb7baf 引言 在iOS开发中,闭包和Block是两个常用的概念。它们都是将一段代码作为变量传递和使用的方式。尽管它们在实现上有一些相似之处,但它们之间还是存在一些重要的区别。本文将会详细介绍闭包和Block的…...
)
后端学习笔记——后端细碎知识点(每天更新......)
细碎知识点 主要是go后端,也会设计到python、java的知识,懒得分类整理,所以都写在一篇文章里面了,方便自己查看笔记。 context.BindJSON获取POST请求中的json数据gin.H封装了生成json的方式 common.ReturnJSONSuccess(c, gin.H{&…...

二进制中1的个数
作者简介:大家好,我是smart哥,前中兴通讯、美团架构师,现某互联网公司CTO 联系qq:184480602,加我进群,大家一起学习,一起进步,一起对抗互联网寒冬 学习必须往深处挖&…...
)
python+matlab text(按图的相对位置显示)
python 用 python 画图时,如果想采用归一化的坐标来指定文本框的位置,则需要用到 transform ax.transAxes 参数,如 ax plt.gca() plt.text(0.1,0.2, "text", fontsize 20, transform ax.transAxes)matlab 方法1 text(___,Name…...

rust 引用/mut 的所有权
在任意给定时间,要么 只能有一个可变引用,要么 只能有多个不可变引用。 不可变引用(shared reference)实现了Copy trait,不会发生所有权转移可变引用(mutable reference)未实现,会发…...

油烟净化器科技改革,清新用餐生活
我最近分析了餐饮市场的油烟净化器等产品报告,解决了餐饮业厨房油腻的难题,更加方便了在餐饮业和商业场所有需求的小伙伴们。 随着餐饮业蓬勃发展,人们对用餐环境的要求也与日俱增。本文将深入研讨餐饮油烟净化器技术的改革方向,…...

[足式机器人]Part3 机构运动学与动力学分析与建模 Ch01-1 刚体系统的运动学约束
本文仅供学习使用,总结很多本现有讲述运动学或动力学书籍后的总结,从矢量的角度进行分析,方法比较传统,但更易理解,并且现有的看似抽象方法,两者本质上并无不同。 2024年底本人学位论文发表后方可摘抄 若有帮助请引用 本文参考: 《空间机构的分析与综合(上册)》-张启先…...

51单片机智能小车
51单片机智能小车 delay.c #include "intrins.h"void Delay2000ms() //11.0592MHz {unsigned char i, j, k;i 15;j 2;k 235;do{do{while (--k);} while (--j);} while (--i); }void Delay10us() //11.0592MHz {unsigned char i;i 2;while (--i); }void Delay…...

9. 嵌入式系统开发:安全性与可靠性设计模式---引言
在复杂的嵌入式系统设计中,为了提高嵌入式系统安全性并保护嵌入式系统免受各种潜在故障的影响,可以采用不同的设计模式。这些模式各自有优势和适用的场景: 1. 受保护的单通道模式(Protected Single Channel Pattern) …...
内网安全:Exchange服务
目录 Exchange服务 实验环境 域横向移动-内网服务-Exchange探针 一. 端口扫描 二. SPN扫描 三. 脚本探针(还可以探针是否有安全漏洞) 域横向移动-内网服务-Exchange爆破 一 .BurpSuite Intruder模块爆破 域横向移动-内网服务-Exchange漏洞 CVE-2020-17144 Exchange R…...

64_《智能体微服务架构企业级实战教程》授权与认证之授权认证集成测试
前言 配套视频教程: 在 Bilibili课堂、CSDN课程、51CTO学堂 同步发售,提供:源码+部署脚本+文档。 bilibili课堂视频教程:智能体微服务架构企业级实战教程_哔哩哔哩_bilibili CSDN课程视频教程:智能体微服务架构企业级实战教程_在线视频教程-CSDN程序员研修院 51CTO学堂…...

ARM指令追踪技术及TRCVICTLR寄存器详解
1. ARM指令追踪技术概述在嵌入式系统开发和调试过程中,指令追踪(Instruction Trace)是一项至关重要的技术。它通过硬件机制记录处理器的执行流程,为开发者提供程序运行的完整轨迹。ARM架构从v7开始引入嵌入式跟踪宏单元࿰…...

智慧无人机巡检-无人机可见光红外数据集 无人机多模态检测数据集 红外与可见光检测数据集
智慧无人机巡检-无人机可见光红外数据集,已完成标注,可导出各种常用数据集,yolo,voc,coco等格式。可见光33000张,红外16100张,目标一张一个 无人机可见光红外目标数据集项目详细信息数据集名称无…...
重构)
嘈杂工业场景下的自适应VAD与双码本声纹识别鉴权系统:基于端侧轻量化神经网络与向量量化(VQ)重构
在大型化工车间、能源集控中心以及金融极密隔离库房中,离线声纹识别是物理访问控制和身份安全核验的重要生物特征屏障。然而,在环境本底噪声高达80dB以上的恶劣工业场景下,常规的语音活动检测(VAD)会频繁误触ÿ…...

AI开始替人办事后,最危险的不是模型不够强,而是它把旧资料当真了
AI开始替人办事后,最危险的不是模型不够强,而是它把旧资料当真了2026年真正值得重视的AI底层能力,是让模型知道该信谁 你有没有发现一个很扎心的变化。 以前我们用AI,最怕它不会。 现在我们用AI,最怕它太会了。 它能写…...

OpenCore Legacy Patcher完全指南:3步让旧款Mac焕发新生的终极方案
OpenCore Legacy Patcher完全指南:3步让旧款Mac焕发新生的终极方案 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher 你是否拥有一台性能尚可但已被…...

应对Claude Code访问不稳定,快速切换至Taotoken的应急方案
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 应对Claude Code访问不稳定,快速切换至Taotoken的应急方案 对于依赖Claude Code进行日常开发或自动化任务的用户来说&a…...

5A智慧景区建设|对标一流!巨有科技打造数智化标杆景区
5A级景区是中国旅游的最高标准,代表着服务与管理的顶尖水平。随着5A评审标准日益严苛,“智慧化”已成为核心硬性指标。然而,不少景区的智慧化建设陷入“重硬件、轻整合”的误区,系统林立、数据孤岛,投入巨大却效果不佳…...

render_async嵌套渲染:构建复杂异步界面的完整解决方案
render_async嵌套渲染:构建复杂异步界面的完整解决方案 【免费下载链接】render_async render_async lets you include pages asynchronously with AJAX 项目地址: https://gitcode.com/gh_mirrors/re/render_async 在现代Web开发中,页面加载速度…...

Hermes Agent工具如何自定义接入Taotoken提供商
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Hermes Agent工具如何自定义接入Taotoken提供商 Hermes Agent 是一款功能强大的AI智能体开发框架,它支持通过自定义提供…...