西瓜书读书笔记整理(十二) —— 第十二章 计算学习理论(下)
第十二章 计算学习理论(下)
- 12.4 VC 维(Vapnik-Chervonenkis dimension)
- 12.4.1 什么是 VC 维
- 12.4.2 增长函数(growth function)、对分(dichotomy)和打散(shattering)
- 12.5 Rademacher 复杂度
- 12.5.1 引入 Rademacher 复杂度
- 12.5.2 定义、定理、引理
- 12.6 稳定性
- 12.6.1 什么是稳定性
- 12.6.2 泛化损失、经验损失、留一损失
- 12.6.3 定义 12.10
- 12.6.4 定理 12.8
- 12.6.5 经验风险最小化(Empirical Risk Minimization, ERM)
- 12.6.6 定理 12.9
- 12.7 总结
12.4 VC 维(Vapnik-Chervonenkis dimension)
12.4.1 什么是 VC 维
VC维 是统计学和机器学习中的一个概念,用于衡量一个假设类(hypothesis class)的表示能力或复杂性。VC维描述了这个假设类可以拟合的样本集的最大大小,使得该假设类可以实现所有可能的二分类标签的组合。
12.4.2 增长函数(growth function)、对分(dichotomy)和打散(shattering)
增长函数 应该是最容易理解的,但是这里我还是摘抄一下原文给出的数学定义。
给定假设空间 H \mathcal{H} H 和示例集 D = { x 1 , x 2 , . . . , x m } D=\{\bm{x}_1,\bm{x}_2,...,\bm{x}_m\} D={x1,x2,...,xm}, H \mathcal{H} H 中每个假设 h h h 都能对 D D D 中示例赋予标记,标记结果可表示为
h ∣ D = { ( h ( x 1 ) , h ( x 2 ) , … , h ( x m ) ) } \left.h\right|_D=\left\{\left(h\left(\boldsymbol{x}_1\right), h\left(\boldsymbol{x}_2\right), \ldots, h\left(\boldsymbol{x}_m\right)\right)\right\} h∣D={(h(x1),h(x2),…,h(xm))}
随着 m m m 的增大, H \mathcal{H} H 中所有假设对 D D D 中的示例所能赋予标记的可能结果数也会增大。
定义 12.6 对所有 m ∈ N m \in \mathbb{N} m∈N,假设空间 H \mathcal{H} H 的增长函数 Π H ( m ) \Pi_{\mathcal{H}}(m) ΠH(m) 为
Π H ( m ) = max { x 1 , … , x m } ⊆ X ∣ { ( h ( x 1 ) , … , h ( x m ) ) ∣ h ∈ H } ∣ (12.21) \Pi_{\mathcal{H}}(m)=\max _{\left\{\boldsymbol{x}_1, \ldots, \boldsymbol{x}_m\right\} \subseteq \mathcal{X}}\left|\left\{\left(h\left(\boldsymbol{x}_1\right), \ldots, h\left(\boldsymbol{x}_m\right)\right) \mid h \in \mathcal{H}\right\}\right| \tag{12.21} ΠH(m)={x1,…,xm}⊆Xmax∣{(h(x1),…,h(xm))∣h∈H}∣(12.21)
增长函数 Π H ( m ) \Pi_{\mathcal{H}}(m) ΠH(m) 表示假设空间 H \mathcal{H} H 对 m m m 个示例所能赋予标记的最大可能结果数。显然, H \mathcal{H} H 对示例所能赋予标记的可能结果数越大, H \mathcal{H} H 的表示能力越强,对学习任务的适应能力也越强。
因此,增长函数描述了假设空间 H \mathcal{H} H 的表示能力,由此反映出假设空间的复杂度。
定理 12.2 对假设空间 H \mathcal{H} H, m ∈ N m\in \mathbb{N} m∈N, 0 < ϵ < 1 0<\epsilon<1 0<ϵ<1 和任意 h ∈ H h \in \mathcal{H} h∈H 有
P ( ∣ E ( h ) − E ^ ( h ) ∣ > ϵ ) ⩽ 4 Π H ( 2 m ) exp ( − m ϵ 2 8 ) (12.22) P(|E(h)-\widehat{E}(h)|>\epsilon) \leqslant 4 \Pi_{\mathcal{H}}(2 m) \exp \left(-\frac{m \epsilon^2}{8}\right) \tag{12.22} P(∣E(h)−E (h)∣>ϵ)⩽4ΠH(2m)exp(−8mϵ2)(12.22)
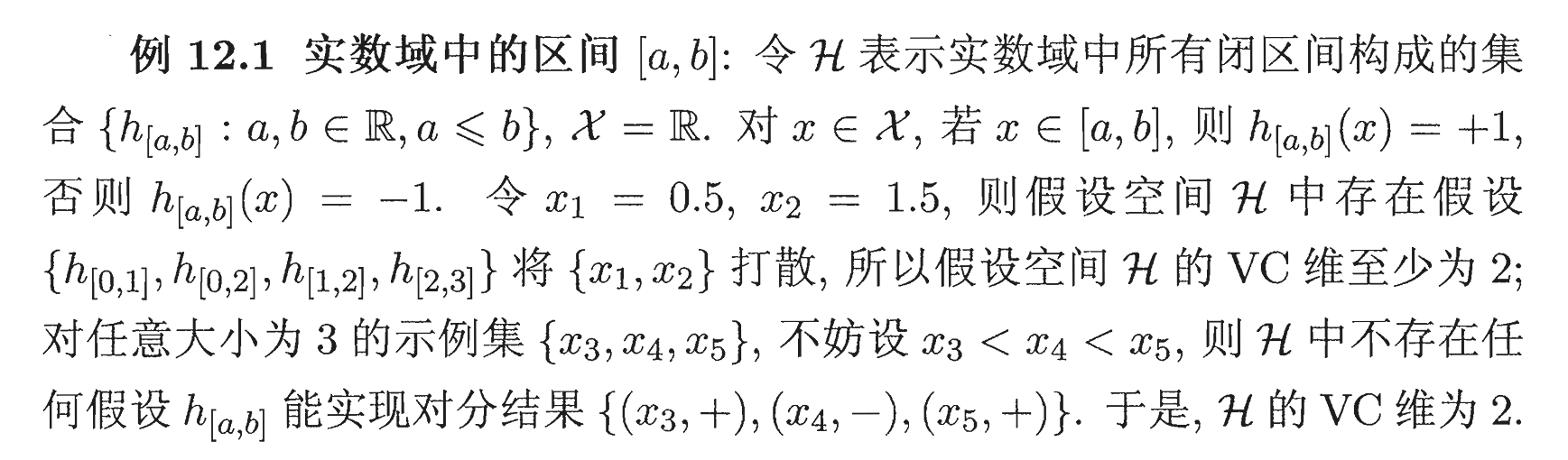
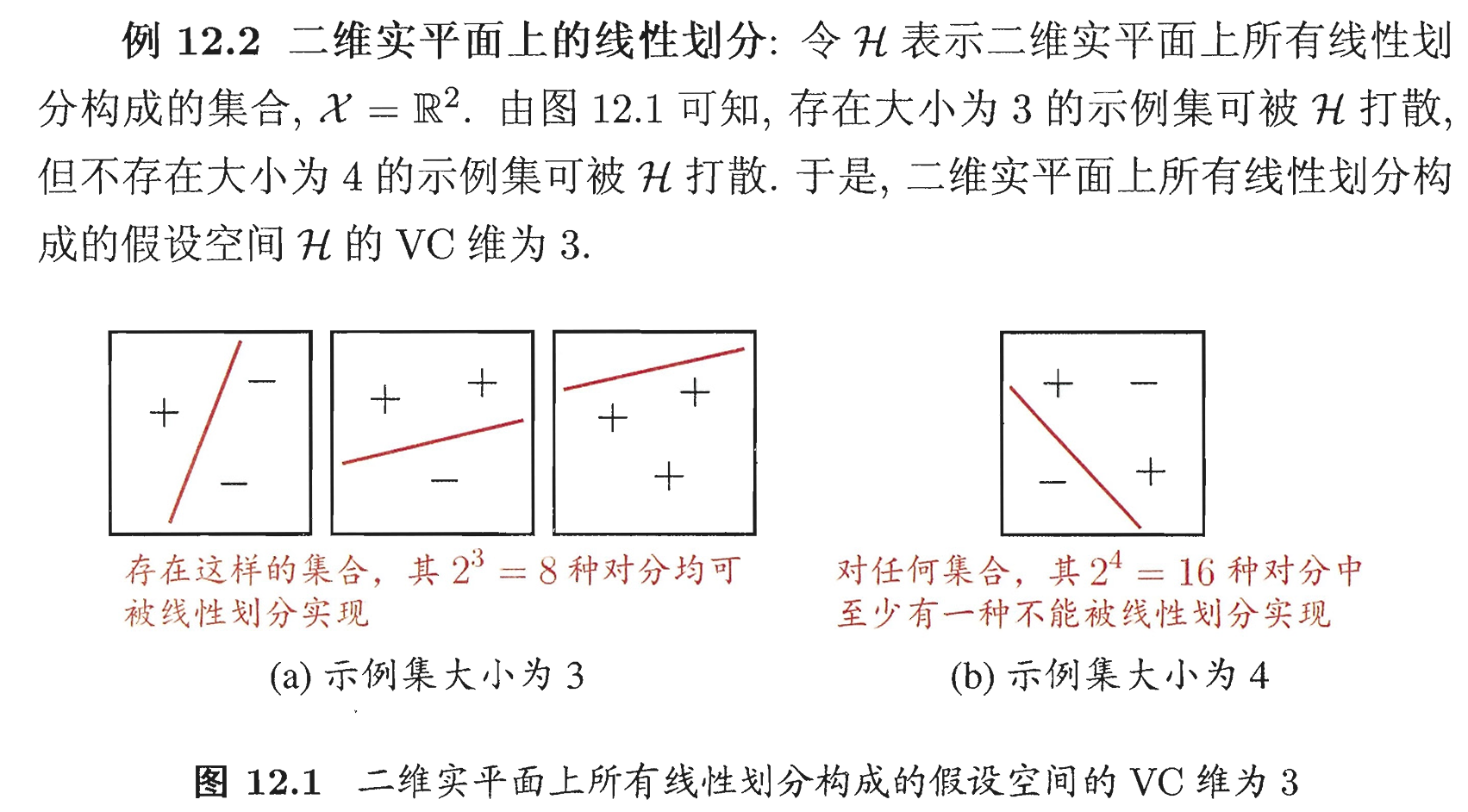
假设空间 H \mathcal{H} H 中不同的假设对于 D D D 中示例赋予标记的结果可能相同,也可能不同;尽管 H \mathcal{H} H 可能包含无穷多个假设,但其对 D D D 中示例赋予标记的可能结果数是有限的:对 m m m 个示例,最多有 2 m 2^m 2m 个可能结果。对二分类问题来说, H \mathcal{H} H 中的假设对 D D D 中示例赋予标记的每种可能结果称为 D D D 的一种 “对分”。若假设空间 H \mathcal{H} H 能实现示例集 D D D 上的所有对分,即 Π H ( m ) = 2 m \Pi_{\mathcal{H}}(m)=2^m ΠH(m)=2m,则称示例集 D D D 能被假设空间 H \mathcal{H} H “打散”。
定理12.2提供了一个关于假设空间 H \mathcal{H} H的期望风险和经验风险之间差距的概率上界。具体来说,它表明当样本容量足够大时,期望风险和经验风险之间的差距不会太大。
定理12.2的条件包括:
- 假设空间 H \mathcal{H} H ;
- 样本容量 m m m ,其中 m m m 是一个自然数;
- 随机变量 ϵ \epsilon ϵ,满足 0 < ϵ < 1 0 < \epsilon < 1 0<ϵ<1;
- 任意的 h ∈ H h \in \mathcal{H} h∈H。
定理12.2的结论是:
- 当样本容量足够大时,期望风险 E ( h ) E(h) E(h)和经验风险 E ^ ( h ) \widehat{E}(h) E (h)之间的差距不大于 ϵ \epsilon ϵ的概率是有限的。
- 具体来说,概率 P ( ∣ E ( h ) − E ^ ( h ) ∣ > ϵ ) P(|E(h) - \widehat{E}(h)| > \epsilon) P(∣E(h)−E (h)∣>ϵ)不超过 4 π H ( 2 m ) exp ( − m ϵ 2 8 ) 4 \pi_{\mathcal{H}}(2m) \exp(-\frac{m\epsilon^2}{8}) 4πH(2m)exp(−8mϵ2)。
这个定理对于机器学习的理论研究和实际应用非常重要。它提供了在随机抽样下,经验风险最小化策略能够保证泛化性能的数学依据。通过控制样本容量和误差 ϵ \epsilon ϵ,我们可以调整概率上界,从而在实际应用中选择合适的样本容量来保证一定的泛化性能。
现在我们可以正式定义 VC 维如下:
定义 12.7 假设空间 H \mathcal{H} H 的 VC 维是能被 H \mathcal{H} H 打散的最大示例集的大小,即
V C ( H ) = max { m : Π H ( m ) = 2 m } (12.23) \mathrm{VC}(\mathcal{H})=\max \left\{m: \Pi_{\mathcal{H}}(m)=2^m\right\} \tag{12.23} VC(H)=max{m:ΠH(m)=2m}(12.23)
VC ( H ) = d \text{VC}(\mathcal{H})=d VC(H)=d 表明存在大小为 d d d 的示例集能被假设空间 H \mathcal{H} H 打散。
需要注意:
- 并不是所有大小为 d d d 的示例集都能被假设空间 H \mathcal{H} H打散;
- VC 维的定义与数据分布 D \mathcal{D} D 无关,数据分布 D \mathcal{D} D 未知时仍能计算出假设空间 H \mathcal{H} H 的VC维。
通常这样来计算 H \mathcal{H} H 的 VC 维:若存在大小为 d d d 的示例集能被 H \mathcal{H} H 打散,但不存在任何大小为 d + 1 d+1 d+1 的示例集能被 H \mathcal{H} H 打散,则 H \mathcal{H} H 的 VC 维是 d d d。
定义12.6给出了假设空间 H \mathcal{H} H的增长函数 Π H ( m ) \Pi_{\mathcal{H}}(m) ΠH(m)的定义。增长函数描述了随着样本容量 m m m的增加,假设空间 H \mathcal{H} H中可能产生的不同输出值的数量的变化情况。
具体来说,对于给定的样本集 { x 1 , x 2 , … , x m } ⊆ X \{x_1, x_2, \ldots, x_m\} \subseteq \mathcal{X} {x1,x2,…,xm}⊆X,假设空间 H \mathcal{H} H的增长函数 Π H ( m ) \Pi_{\mathcal{H}}(m) ΠH(m)定义为 H \mathcal{H} H中所有可能的输出向量 ( h ( x 1 ) , h ( x 2 ) , … , h ( x m ) ) (h(x_1), h(x_2), \ldots, h(x_m)) (h(x1),h(x2),…,h(xm))的最大数量,其中 h ∈ H h \in \mathcal{H} h∈H。
这个定义反映了随着样本容量的增加,假设空间 H \mathcal{H} H中可能存在的不同输出组合的数量。增长函数的性质对于理解VC维和样本容量的选择有着重要的影响。在机器学习中,我们希望增长函数的值不要增长过快,因为这将导致VC维过大,使得模型过于复杂,容易过拟合。同时,我们也希望增长函数的值不要太小,因为这将限制模型的表达能力,使其无法很好地拟合数据。
引理 12.2 若假设空间 H \mathcal{H} H 的 VC 维为 d d d,则对任意 m ∈ N m\in \mathbb{N} m∈N 有
Π H ( m ) ⩽ ∑ i = 0 d ( m i ) (12.24) \Pi_{\mathcal{H}}(m) \leqslant \sum_{i=0}^d\left(\begin{array}{c} m \\i \end{array}\right) \tag{12.24} ΠH(m)⩽i=0∑d(mi)(12.24)
这个公式涉及到 VC维(VC dimension),这是一个在机器学习理论中常用的术语,用于描述一个假设类的复杂度。VC维是一个假设类能够“划分”(shatter)的最大集合的大小。在这个引理中,它给出了对于具有VC维为 d d d 的假设空间 H \mathcal{H} H,在 m m m 个样本上的划分可能性的上界。
假设我们有一个假设空间 H \mathcal{H} H,它的 VC维为 d = 2 d=2 d=2。这意味着 H \mathcal{H} H 能够划分的最大点集的大小为 2。现在考虑一个包含 3 个点的数据集 S = x 1 , x 2 , x 3 S={x_1, x_2, x_3} S=x1,x2,x3。
根据公式,我们可以计算 H \mathcal{H} H 在 S S S 上的划分可能性:
Π H ( 3 ) ≤ ∑ i = 0 2 ( 3 i ) = ( 3 0 ) + ( 3 1 ) + ( 3 2 ) = 1 + 3 + 3 = 7 \Pi_{\mathcal{H}}(3) \leq \sum_{i=0}^{2}\binom{3}{i} = \binom{3}{0} + \binom{3}{1} + \binom{3}{2} = 1 + 3 + 3 = 7 ΠH(3)≤∑i=02(i3)=(03)+(13)+(23)=1+3+3=7。
这意味着 H \mathcal{H} H 在 S S S 上有最多7种可能的划分方式。实际上,对于VC维为2的假设空间,我们可以列出以下7种划分:
- 将所有点分为同一类。
- 将 x 1 x_1 x1 与 x 2 x_2 x2 分为一类,x3分为另一类。
- 将 x 1 x_1 x1 与 x 3 x_3 x3 分为一类,x2分为另一类。
- 将 x 2 x_2 x2 与 x 3 x_3 x3 分为一类,x1分为另一类。
- 将 x 1 x_1 x1 分为一类, x 2 x_2 x2 与 x 3 x_3 x3 分为另一类。
- 将 x 2 x_2 x2 分为一类, x 1 x_1 x1 与 x 3 x_3 x3 分为另一类。
- 将 x 3 x_3 x3 分为一类, x 1 x_1 x1 与 x 2 x_2 x2 分为另一类。
这些划分展示了 H \mathcal{H} H 在 S S S 上的最大划分能力。这个例子说明了如何使用公式来计算给定假设空间在特定数据集上的划分可能性。
在机器学习理论中,这个公式可以用来分析假设空间的复杂度,以及它对过拟合风险的影响。例如,如果一个假设空间的VC维较小,那么它在训练数据上的划分可能性就有限,这通常意味着模型的泛化性能较好。反之,如果VC维较大,那么模型可能会过度拟合训练数据,导致在新数据上的表现不佳。
右边的求和表示从 0 0 0 到 d d d 的二项式系数之和,其中 ( m i ) \binom{m}{i} (im)表示从 m m m 个元素中选择 i i i 个元素的组合数。这个公式表明,当假设空间的VC维为 d d d 时,最多可以有 ∑ i = 0 d ( m i ) \sum_{i=0}^{d}\binom{m}{i} ∑i=0d(im) 种不同的划分方式。
推论 12.2 若假设空间 H \mathcal{H} H 的 VC 维为 d d d, 则对任意整数 m ⩾ d m \geqslant d m⩾d 有
Π H ( m ) ⩽ ( e ⋅ m d ) d (12.28) \Pi_{\mathcal{H}}(m) \leqslant\left(\frac{e \cdot m}{d}\right)^d \tag{12.28} ΠH(m)⩽(de⋅m)d(12.28)
根据推论 12.2 和定理 12.2 可得基于 VC 维的泛化误差界:
定理 12.3 若假设空间 H \mathcal{H} H 的 VC 维为 d d d,则对任意 m > d m > d m>d, 0 < δ < 1 0<\delta<1 0<δ<1 和 h ∈ H h\in \mathcal{H} h∈H 有
P ( E ( h ) − E ^ ( h ) ⩽ 8 d ln 2 e m d + 8 ln 4 δ m ) ⩾ 1 − δ (12.29) P\left(E(h)-\widehat{E}(h) \leqslant \sqrt{\frac{8 d \ln \frac{2 e m}{d}+8 \ln \frac{4}{\delta}}{m}}\right) \geqslant 1-\delta \tag{12.29} P E(h)−E (h)⩽m8dlnd2em+8lnδ4 ⩾1−δ(12.29)
由定理 12.3 可知,式 (12.29) 的泛化误差界只与样本数目 m m m 有关,收敛速率为 O ( 1 m ) O(\frac{1}{\sqrt{m}}) O(m1),与数据分布 D D D和样本集 D D D无关。因此,基于VC维的泛化误差界是分布无关(distribution-free)、数据独立(data-independent)的。
定理 12.4 任何 VC 维有限的假设空间 H \mathcal{H} H 都是(不可知)PAC 可学习的。
关于 VC维 、 PAC可学习性、不可知学习 前面章节已经详细介绍,结合以上概念,我们可以理解这句话的意思是:如果一个假设空间 H \mathcal{H} H 的 VC维是有限的,那么存在一个学习算法,可以从有限的训练数据中学习到一个假设,使得该假设在未知的真实数据上的泛化误差(以概率至少为 1 − δ 1-\delta 1−δ)小于 ϵ \epsilon ϵ。这个结论意味着,只要假设空间的复杂度(由VC维衡量)是有限的,那么就可以找到一个学习算法,在多项式时间内从有限的训练数据中学习到一个近似正确的假设。
12.5 Rademacher 复杂度
12.5.1 引入 Rademacher 复杂度
12.4 节提到,基于VC维的泛化误差界是分布无关、数据独立的,也就是说,它对任何数据分布都成立。这使得基于VC维的学习性分析结果具有一定的“普适性”;但另一方面,由于没有考虑数据自身,基于VC维得到的泛化误差界通常比较“松”,对那些与学习问题的典型情况相差甚远的较“坏”分布来说尤其如此。
Rademacher 复杂度是另一种刻画假设空间复杂度的方法,与VC维不同的是,它在一定程度上考虑了数据分布。
12.5.2 定义、定理、引理
Rademacher 复杂度是一个用来衡量假设空间 F \mathcal{F} F 复杂度的概念,它通过随机扰动训练数据来估计一个函数类在实际数据上的期望性能。具体来说,Rademacher复杂度定义如下:
设 Z \mathcal{Z} Z是输入空间, F \mathcal{F} F是一个假设空间, Z = { z 1 , z 2 , … , z m } Z = \{\bm{z}_1, \bm{z}_2, \dots, \bm{z}_m\} Z={z1,z2,…,zm}是从 Z \mathcal{Z} Z 中取样得到的有限训练集。Rademacher 复杂度 R ^ Z ( F ) \hat{R}_Z(\mathcal{F}) R^Z(F)定义为:
R ^ Z ( F ) = E σ [ sup f ∈ F ∣ 1 m ∑ i = 1 m σ i f ( z i ) ∣ ] (12.40) \hat{R}_Z(\mathcal{F}) = \mathbb{E}_{\sigma} \left[ \sup_{f \in \mathcal{F}} \left| \frac{1}{m} \sum_{i=1}^m \sigma_i f(\bm{z}_i) \right| \right] \tag{12.40} R^Z(F)=Eσ[f∈Fsup m1i=1∑mσif(zi) ](12.40)
其中, σ = ( σ 1 , σ 2 , … , σ m ) \sigma = (\sigma_1, \sigma_2, \dots, \sigma_m) σ=(σ1,σ2,…,σm)是一个随机变量序列,每个 σ i \sigma_i σi独立地取值于 { − 1 , 1 } \{-1, 1\} {−1,1}。 R ^ m ( Z ) \hat{R}_m(Z) R^m(Z)表示在随机选择的扰动下,假设空间 F \mathcal{F} F中函数的期望最大偏差。
Rademacher复杂度提供了一种衡量假设空间复杂性的方法,它考虑了数据分布的影响,因为它依赖于训练数据集 S \mathcal{S} S。通过研究Rademacher复杂度,可以更好地理解假设空间的复杂性如何影响学习算法的泛化性能。在机器学习理论中,Rademacher复杂度被广泛用于分析学习算法的性能,特别是在支持向量机(SVM)和神经网络等复杂模型的研究中。
定义 12.9 函数空间 F 关于 Z 上分布 D 的 Rademacher 复杂度
R m ( F ) = E Z ⊆ Z : ∣ Z ∣ = m [ R ^ Z ( F ) ] . (12.41) R_m(\mathcal{F}) = \mathbb{E}_{Z \subseteq \mathcal{Z}: |Z|=m} [ \widehat{R}_Z(\mathcal{F}) ]. \tag{12.41} Rm(F)=EZ⊆Z:∣Z∣=m[R Z(F)].(12.41)
定理 12.5 对实值函数空间 F : Z → [ 0 , 1 ] \mathcal{F}: \mathbb{Z} \rightarrow [0,1] F:Z→[0,1], 根据分布 D \mathcal{D} D 从 Z \mathbb{Z} Z 中独立同分布采样得到示例集 Z = { z 1 , z 2 , … , z m } Z = \{\bm{z}_1, \bm{z}_2, \ldots, \bm{z}_m\} Z={z1,z2,…,zm}, z i ∈ Z z_i \in \mathbb{Z} zi∈Z, 0 < δ < 1 0 < \delta < 1 0<δ<1, 对任意 f ∈ F f \in \mathcal{F} f∈F, 以至少 1 − δ 1-\delta 1−δ 的概率有
E [ f ( z ) ] ⩽ 1 m ∑ i = 1 m f ( z i ) + 2 R m ( F ) + ln ( 1 / δ ) 2 m (12.42) \mathbb{E}[f(\boldsymbol{z})] \leqslant \frac{1}{m} \sum_{i=1}^m f\left(\boldsymbol{z}_i\right)+2 R_m(\mathcal{F})+\sqrt{\frac{\ln (1 / \delta)}{2 m}} \tag{12.42} E[f(z)]⩽m1i=1∑mf(zi)+2Rm(F)+2mln(1/δ)(12.42)
其中, 1 m ∑ i = 1 m f ( z i ) \frac{1}{m} \sum_{i=1}^m f(z_i) m1∑i=1mf(zi) 是经验均值, R m ( F ) R_m(\mathcal{F}) Rm(F) 是经验风险上界,而 ln ( 1 / δ ) 2 m \sqrt{\frac{\ln(1/\delta)}{2m}} 2mln(1/δ) 是一个随机项,它与置信水平 δ \delta δ 相关。
E [ f ( z ) ] ⩽ 1 m ∑ i = 1 m f ( z i ) + 2 R ^ Z ( F ) + 3 ln ( 2 / δ ) 2 m (12.43) \mathbb{E}[f(\boldsymbol{z})] \leqslant \frac{1}{m} \sum_{i=1}^m f\left(\boldsymbol{z}_i\right)+2 \widehat{R}_Z(\mathcal{F})+3 \sqrt{\frac{\ln (2 / \delta)}{2 m}} \tag{12.43} E[f(z)]⩽m1i=1∑mf(zi)+2R Z(F)+32mln(2/δ)(12.43)
其中, 1 m ∑ i = 1 m f ( z i ) \frac{1}{m} \sum_{i=1}^m f(z_i) m1∑i=1mf(zi) 是经验均值, R ^ Z ( F ) \widehat{R}_Z(\mathcal{F}) R Z(F) 是经验风险上界,而 ln ( 2 / δ ) 2 m \sqrt{\frac{\ln(2/\delta)}{2m}} 2mln(2/δ) 是一个随机项,它与置信水平 δ \delta δ 相关。
定理 12.5 提供了对实值函数空间 F : Z → [ 0 , 1 ] \mathcal{F} : \mathbb{Z} \to [0, 1] F:Z→[0,1] 上的期望函数 E [ f ( z ) ] \mathbb{E}[f(z)] E[f(z)] 的上界,其中 z ∈ Z z \in \mathbb{Z} z∈Z, 0 < δ < 1 0 < \delta < 1 0<δ<1,并且样本集 Z = { z 1 , z 2 , … , z m } Z = \{z_1, z_2, \dots, z_m\} Z={z1,z2,…,zm} 是根据分布 D \mathcal{D} D 从 Z \mathbb{Z} Z 中独立同分布采样的。定理保证了对于任意的 f ∈ F f \in \mathcal{F} f∈F,至少有概率 1 − δ 1 - \delta 1−δ 满足以下两个不等式:
这两个不等式都涉及到经验风险上界和随机项,它们反映了经验风险和期望风险之间的关系。这些不等式对于理解和估计未知分布上的期望函数具有重要意义,特别是在有限样本的情况下。通过这些不等式,我们可以获得关于期望函数的一个上界,从而对未知分布有一个更好的估计。
定理 12.6 对假设空间 H : X → { − 1 , + 1 } \mathcal{H}: \mathcal{X} \to \{-1,+1\} H:X→{−1,+1},根据分布 D \mathcal{D} D 从 X \mathcal{X} X 中独立同分布采样得到样本集 D = { x 1 , x 2 , … , x m } \mathcal{D} = \{\bm{x}_1, \bm{x}_2, \dots, \bm{x}_m\} D={x1,x2,…,xm}, x i ∈ X \bm{x}_i \in \mathcal{X} xi∈X, 0 < δ < 1 0 < \delta < 1 0<δ<1,对任意 h ∈ H h \in \mathcal{H} h∈H,以至少 1 − δ 1 - \delta 1−δ 的概率有
E ( h ) ≤ E ^ ( h ) + R m ( H ) + ln ( 1 / δ ) 2 m (12.47) E(h) \leq \hat{E}(h) + R_m(\mathcal{H}) + \sqrt{\frac{\ln(1/\delta)}{2m}} \tag{12.47} E(h)≤E^(h)+Rm(H)+2mln(1/δ)(12.47)
E ( h ) ≤ E ^ ( h ) + R ^ D ( H ) + 3 ln ( 2 / δ ) 2 m (12.48) E(h) \leq \hat{E}(h) + \widehat{R}_D(\mathcal{H}) + 3\sqrt{\frac{\ln(2/\delta)}{2m}} \tag{12.48} E(h)≤E^(h)+R D(H)+32mln(2/δ)(12.48)
这个定理给出了在假设空间 H \mathcal{H} H 中,当从分布 D \mathcal{D} D 中独立同分布采样得到样本集 D \mathcal{D} D 时,期望函数 E ( h ) E(h) E(h) 的上界。定理中的两个不等式分别考虑了经验风险 R m ( H ) R_m(\mathcal{H}) Rm(H) 和分布风险 R ^ D ( H ) \widehat{R}_D(\mathcal{H}) R D(H) 的情况。
基于 Rademacher 复杂度的泛化误差界依赖于具体学习问题上的数据分布,有点类似于为该学习问题“量身定制”的,因此它通常比基于 VO 维的泛化误差界更紧一些.
定理 12.7 假设空间 H \mathcal{H} H 的 Rademacher 复杂度 R m ( H ) R_m(\mathcal{H}) Rm(H) 与增长函数 Π H ( m ) \Pi_{\mathcal{H}}(m) ΠH(m) 满足:
R m ( H ) ⩽ 2 ln Π H ( m ) m (12.52) R_m(\mathcal{H}) \leqslant \sqrt{\frac{2\ln \Pi_{\mathcal{H}}(m)}{m}} \tag{12.52} Rm(H)⩽m2lnΠH(m)(12.52)
这个定理给出了假设空间 H \mathcal{H} H 的 Rademacher 复杂度 R m ( H ) R_m(\mathcal{H}) Rm(H) 与增长函数 Π H ( m ) \Pi_{\mathcal{H}}(m) ΠH(m) 之间的关系。根据公式 ( 12.52 ) (12.52) (12.52),Rademacher 复杂度被上界为增长函数的对数的平方根除以样本数量。
12.6 稳定性
12.6.1 什么是稳定性
12.6.2 泛化损失、经验损失、留一损失
泛化损失 刻画了假设 L D \mathfrak{L}_D LD 的预测标记 L D ( x ) \mathfrak{L}_D(\bm{x}) LD(x) 与真实标记 y y y 之间的差别,简记为 ℓ ( L D , z ) \ell(\mathfrak{L}_D,\bm{z}) ℓ(LD,z)。
ℓ ( L , D ) = E x ∈ X , z = ( x , y ) [ ℓ ( L D , z ) ] (12.54) \ell(\mathfrak{L}, \mathcal{D}) = \mathbb{E}_{\bm{x} \in \mathcal{X}, \bm{z} = (\bm{x}, y)} [\ell(\mathfrak{L}_D, \bm{z})] \tag{12.54} ℓ(L,D)=Ex∈X,z=(x,y)[ℓ(LD,z)](12.54)
12.6.3 定义 12.10
定义 12.10 对于任何 x ∈ X x \in X x∈X, z = ( x , y ) z = (x, y) z=(x,y), 如果学习算法 L \mathcal{L} L 满足:
∣ l ( L D , z ) − l ( L D ∖ i , z ) ∣ ≤ β , i = 1 , 2 , … , m , (12.57) |l(\mathfrak{L}_D, z) - l(\mathfrak{L}_{D \setminus i}, z)| \leq \beta, \; i = 1, 2, \ldots, m, \tag{12.57} ∣l(LD,z)−l(LD∖i,z)∣≤β,i=1,2,…,m,(12.57)
则称 L \mathfrak{L} L 关于损失函数 l l l 满足 β \beta β-均匀稳定性。
这里, L D \mathcal{L}_D LD 表示使用数据集 D D D 训练得到的学习器,而 L D ∖ i \mathcal{L}_{D \setminus i} LD∖i 表示使用除了第 i i i 个样本外的数据集 D D D 训练得到的学习器。
12.6.4 定理 12.8
定理 12.8 给定从分布 D \mathcal{D} D 上独立同分布采样得到的大小为 m m m 的示例集 D D D,若学习算法 L \mathfrak{L} L 满足关于损失函数 ℓ \ell ℓ 的 β \beta β-均匀稳定性,且损失函数 ℓ \ell ℓ 的上界为 M M M, 0 < δ < 1 0 < \delta < 1 0<δ<1,则对任意 m ≥ 1 m \geq 1 m≥1,以至少 1 − δ 1 - \delta 1−δ 的概率有
ℓ ( L , D ) ⩽ ℓ ^ ( L , D ) + 2 β + ( 4 m β + M ) ln ( 1 / δ ) 2 m (12.58) \ell(\mathfrak{L}, \mathcal{D}) \leqslant \hat{\ell}(\mathfrak{L}, \mathcal{D}) + 2\beta + \left(4m\beta + M\right)\sqrt{\frac{\ln(1/\delta)}{2m}} \tag{12.58} ℓ(L,D)⩽ℓ^(L,D)+2β+(4mβ+M)2mln(1/δ)(12.58)
ℓ ( L , D ) ⩽ ℓ l o o ( L , D ) + β + ( 4 m β + M ) ln ( 1 / δ ) 2 m (12.59) \ell(\mathfrak{L}, \mathcal{D}) \leqslant \ell_{loo}(\mathfrak{L}, \mathcal{D}) + \beta + \left(4m\beta + M\right)\sqrt{\frac{\ln(1/\delta)}{2m}} \tag{12.59} ℓ(L,D)⩽ℓloo(L,D)+β+(4mβ+M)2mln(1/δ)(12.59)
这个定理给出了学习算法 L \mathfrak{L} L 在满足 β \beta β-均匀稳定性和损失函数 ℓ \ell ℓ 的上界为 M M M 的情况下,对于任意大小为 m m m 的示例集 D \mathcal{D} D,以至少 1 − δ 1 - \delta 1−δ 的概率,其损失函数 ℓ \ell ℓ 的上界。
12.6.5 经验风险最小化(Empirical Risk Minimization, ERM)
对损失函数 ℓ \ell ℓ,若学习算法 L \mathfrak{L} L 所输出的假设满足经验损失最小化,则称算法 L \mathfrak{L} L 满足 经验风险最小化 (Empirical Risk Minimization) 原则,简称算法是 ERM 的。
在机器学习中,结构风险是一个模型的复杂度与泛化误差之间的权衡。它是指一个模型在处理未知数据时可能产生的预测误差,即模型在新数据上的表现。结构风险通常包括模型的复杂度和训练数据的噪声等因素。
结构风险最小化(Structured Risk Minimization, SRM)是一种机器学习中的学习策略,它试图找到一个既能很好地拟合训练数据又能保持低复杂度的模型。简单来说,结构风险最小化的目标是在训练误差和模型复杂度之间取得平衡,以获得更好的泛化能力。
与经验风险最小化(Empirical Risk Minimization, ERM)不同,经验风险最小化只关注模型在训练数据上的表现,而结构风险最小化考虑了模型的复杂度,试图避免过拟合问题。通过引入正则化项或其他复杂度惩罚机制,结构风险最小化可以控制模型的复杂度,从而提高模型在新数据上的性能。
因此,结构风险最小化是一种更全面的学习策略,它不仅考虑了模型在训练数据上的表现,还考虑了模型的复杂度,以提高模型的泛化能力。
12.6.6 定理 12.9
定理 12.9 若学习算法 L \mathfrak{L} L 是 ERM 且稳定的,则假设空间 H \mathcal{H} H 可学习。
12.7 总结
从 PAC 学习到 VC 维,再到 Rademacher 复杂度,最后以稳定性收尾,这些都纯属理论研究,对于绝大多数人来说,非常的无趣且乏味。尤其是使用一堆符号进行推导,最后得出其他的符号表达式的过程中。
篇幅+本人能力有限,这里完全不含任何定理的推导过程。主要想描述一下有这个定义、定理、推论存在,并且希望自己能理解并将自己的理解记录下来。
理论研究是推动创建的基础,并且指导着实际活动,有助于我们深入理解现象的本质和规律。愿你们也能在被一堆符号惹恼以后能够感受它们的魅力 ~
Smileyan
2024.01.31 23:06
相关文章:
西瓜书读书笔记整理(十二) —— 第十二章 计算学习理论(下)
第十二章 计算学习理论(下) 12.4 VC 维(Vapnik-Chervonenkis dimension)12.4.1 什么是 VC 维12.4.2 增长函数(growth function)、对分(dichotomy)和打散(shattering&…...

初探分布式链路追踪
本篇文章,主要介绍应用如何正确使用日志系统,帮助用户从依赖、输出、清理、问题排查、报警等各方面全面掌握。 可观测性 可观察性不单是一套理论框架,而且并不强制具体的技术规格。其核心在于鼓励团队内化可观察性的理念,并确保由…...
闭包的理解?闭包使用场景
说说你对闭包的理解?闭包使用场景 #一、是什么 一个函数和对其周围状态(lexical environment,词法环境)的引用捆绑在一起(或者说函数被引用包围),这样的组合就是闭包(closure&#…...

openssl3.2 - 帮助文档的整理
文章目录 openssl3.2 - 帮助文档的整理概述笔记整理后, 非空的文件夹如下整理后, 留下的有点用的文件列表如下备注END openssl3.2 - 帮助文档的整理 概述 openssl3.2源码工程编译安装完, 对于库的使用者, 有用的文档, 远不止安装的那些html. 用everything查找, 配合手工删除,…...
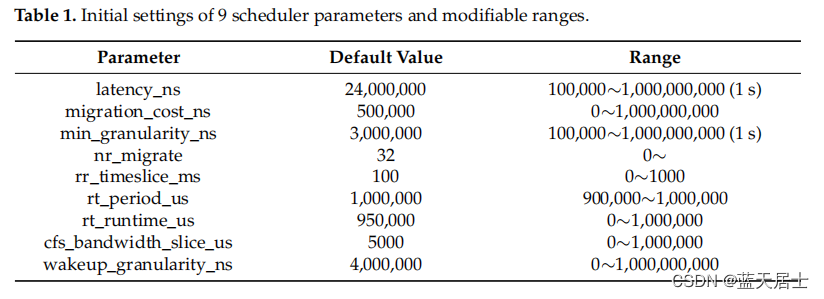
中移(苏州)软件技术有限公司面试问题与解答(5)—— Linux进程调度参数调优是如何通过代码实际完成的1
接前一篇文章:中移(苏州)软件技术有限公司面试问题与解答(0)—— 面试感悟与问题记录 本文对于中移(苏州)软件技术有限公司面试问题中的“(11)Linux进程调度参数调优是如…...
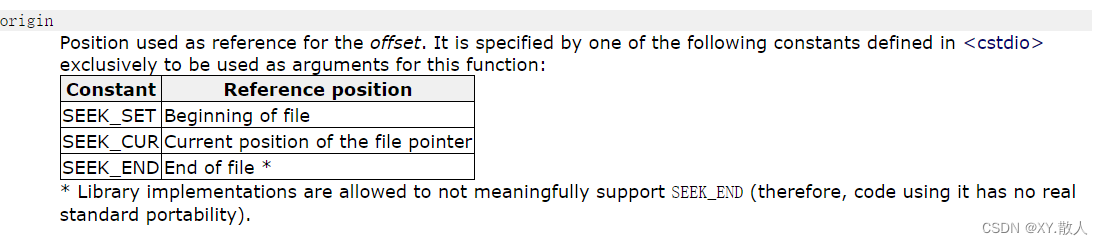
初识C语言·文件操作
目录 1 关于文件 i)文件的基本知识 ii)数据文件的分类 2 文件打开和关闭 i)流和标准流 ii)文件指针 iii)文件打开和关闭 3 文件的顺序读写 i) fgetc fputc ii) fgets fputs iii) fscanf fprintf iv) fwrite fread 4 对比一组函数 scanf/fscanf/sscanf/printf/fpri…...

跨境卖家:如何利用自养号测评抢占市场先机?
在当今的跨境电商领域,产品的销量和评价是影响产品在市场上的表现的关键因素。对于卖家而言,自行养号进行产品测评不仅有助于提升销量,更成为了他们在这个竞争激烈的市场中保持竞争力的必备策略。 相较于一些卖家仍然依赖于服务商进行测评&a…...

开发手札:Github Timeout 22
今天(2024.01.26日),提交github又出现了ssh connect timeout errorcode 22,不论是创建新的sshkey还是配置.ssh/config都没用。 偶然在知乎上看到了解决方案,只需要在host中添加: 140.82.113.4 githu…...
)
学习鸿蒙基础(3)
1.组件重用样式 如果每个组件的样式都需要单独设置,在开发过程中会出现大量代码在进行重复样式设置,虽然可以复制粘贴,但为了代码简洁性和后续方便维护,可以采用公共样式进行复用的装饰器Styles。 Styles装饰器可以将多条样式设置…...

2024/1/27 备战蓝桥杯 1-2
目录 金币 0金币 - 蓝桥云课 (lanqiao.cn) 天干地支 0天干地支 - 蓝桥云课 (lanqiao.cn) 明明的随机数 0明明的随机数 - 蓝桥云课 (lanqiao.cn) 浇灌 0灌溉 - 蓝桥云课 (lanqiao.cn) 金币 0金币 - 蓝桥云课 (lanqiao.cn) 思路:放两种情况(k:代…...
【PyQt】02-基本UI
文章目录 前言一、首先了解什么是GUI?二、初学程序1.界面展示代码运行结果 2.控件2.1按钮展示代码运行结果 2.2 纯文本和输入框代码运行结果 3、重新设置大小 -resize4、移动窗口-move()5、设置界面在电脑中央5.1 代码运行结果 6、设置窗口图标代码运行结果 7、布局…...
无需 Root 卸载手机预装软件,精简过的老年机又行了
基础准备 准备目标手机、USB 数据线、以及一台电脑。手机 USB 连接电脑,开发者选项中打开 USB 调试。(开发者选项默认隐藏,需要在关于手机中多次点击版本号才能调出)。 安装手机驱动,下载安装 ADB 工具包。 开始操作…...
----快速指南)
【Spring连载】使用Spring Data访问Redis(一)----快速指南
【Spring连载】使用Spring Data访问Redis(一)----快速指南 一、导入依赖二、Hello World程序 一、导入依赖 在pom.xml文件加入如下依赖就可以下载到spring data redis的jar包了: <dependency><groupId>org.springframework.boot…...

Redis 学习笔记 2:Java 客户端
Redis 学习笔记 2:Java 客户端 常见的 Redis Java 客户端有三种: Jedis,优点是API 风格与 Redis 命令命名保持一致,容易上手,缺点是连接实例是线程不安全的,多线程场景需要用线程池来管理连接。Redisson&…...
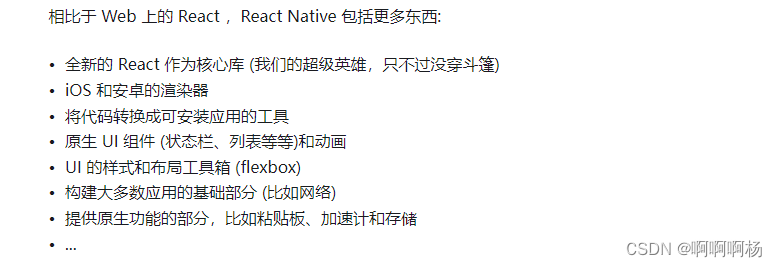
React Native
学习目标 解决以下问题: 1.什么是 React Native ?为什么它的名字中有 “Native” 字样? 2.为什么 React Native 如此之酷? 3.我们可以分别使用 React Native 和 React 来开发什么? 4.为什么会出现 ReactDOM ?它是做什…...

分布式搜索引擎_学习笔记_3
分布式搜索引擎03 0.学习目标 1.数据聚合 **聚合(aggregations)**可以让我们极其方便的实现对数据的统计、分析、运算。例如: 什么品牌的手机最受欢迎?这些手机的平均价格、最高价格、最低价格?这些手机每月的销售…...
主要任务)
机器学习系列——(二)主要任务
导语: 随着信息时代的到来,机器学习作为一项重要技术正逐渐渗透到我们的生活和工作中。它的主要任务是通过使用数据和算法,让计算机系统从中学习并改进性能,使其能够更智能地处理问题和做出决策。本文将详细介绍机器学习的主要任…...

十分钟快速上手Spring Boot与微信小程序API接口的调用,快速开发小程序后端服务
1.1 微信小程序API接口介绍 微信小程序API接口是连接小程序前端与后端服务器的桥梁,它提供了丰富的功能接口,包括用户信息、支付、模板消息、数据存储等。这些API接口能够满足开发者在小程序中实现各种复杂业务逻辑的需求。 用户信息接口 用户信息接口…...

理想架构的高回退Doherty功率放大器理论与ADS仿真-Multistage
理想架构的高回退Doherty功率放大器理论与仿真-Multistage 参考: 三路Doherty设计 01 射频基础知识–基础概念 Switchmode RF and Microwave Power Amplifiers、 理想架构的Doherty功率放大器(等分经典款)的理论与ADS电流源仿真参考&#x…...

<网络安全>《11 网络安全审计系统》
1 概念 审计是对资料作出证据搜集及分析,以评估企业状况,然后就资料及一般公认准则之间的相关程度作出结论及报告。 国际互联网络安全审计(网络备案),是为了加强和规范互联网安全技术防范工作,保障互联网…...

Unity PBR材质工作流:800个开箱即用的工业级材质球
1. 这不是“又一个免费资源包”,而是一套能直接进项目用的材质球工作流“Unity材质球资源集”这词儿听多了,点开链接——要么是30个基础金属塑料木头,要么是200个名字叫“Metal_Rough_01_v2_final_renamed”却连UV Tile都没调对的半成品。我去…...

黑群晖硬盘满了别慌!手把手教你用SSH命令行扩容,Linux系统也通用
黑群晖存储扩容实战:SSH命令行全流程指南与Linux通用技巧当你发现黑群晖的存储空间亮起红灯时,那种焦虑感我深有体会。去年我的媒体服务器突然报出"存储空间不足"警告,当时存放的4TB家庭影像资料和重要工作备份几乎占满了整个磁盘。…...
)
Midjourney火焰生成实战手册(含17组已验证火纹Prompt+SDXL对比基准数据)
更多请点击: https://codechina.net 第一章:Midjourney火焰生成的核心原理与技术边界 Midjourney 并不原生支持“火焰生成”这一独立功能,其图像合成能力完全依赖于文本提示(prompt)对扩散模型隐空间的引导。所谓“火…...

鸿蒙electron跨端框架PC导出管家实战:把交付前的检查、复制和导出做成一个工坊
前言 欢迎加入鸿蒙PC开发者社区,共同打造开发者工具生态:鸿蒙PC开发者社区 :https://harmonypc.csdn.net/ 项目开源地址:https://AtomGit.com/lqjmac/ele-daochuguanjia 我做 导出管家 时最先确认的,不是颜色和布局…...

Harness与Agent SDK的边界划分:最佳实践
Harness与Agent SDK的边界划分:最佳实践 引言 在云原生软件交付的下半场,企业面临的核心矛盾已经从「有没有工具链」变成了「能不能把工具链用出价值」。作为全球领先的软件交付平台(SDP),Harness凭借开箱即用的CI/CD、Feature Flag、混沌工程、合规治理等能力,已经成为…...

ES 模块:JavaScript 模块化的标准方案
ES 模块:JavaScript 模块化的标准方案 什么是 ES 模块? ES 模块(ES Modules,简称 ESM)是 ECMAScript 2015(ES6)引入的官方模块化规范。 ES 模块 vs CommonJS 特性CommonJSES Modules加载方式同步…...

鸿蒙今日穿搭页面构建:搭配推荐与风格筛选模块详解
鸿蒙今日穿搭页面构建:搭配推荐与风格筛选模块详解 前言 在 HarmonyOS 6.0 应用开发中,穿搭类页面的核心挑战在于如何展示搭配灵感、风格筛选和衣橱管理。本文将以“今日穿搭”应用的主页面为例,深入解析如何在鸿蒙平台上构建时尚穿搭类应用的…...

通过curl命令直接测试Taotoken聊天补全接口的配置与调用方法
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过curl命令直接测试Taotoken聊天补全接口的配置与调用方法 在开发或调试大模型应用时,有时你可能希望绕过高级SDK&am…...

导电塑料厂家直销:美国RTP材料全系列专业供应指南
导电塑料选购的关键在于源头直采的供应链整合与专业技术服务能力。宏裕塑胶依托与美国RTP公司的直接合作,提供全系列工程塑料原料,涵盖导电、抗静电、导热及长玻纤增强等特种材料,通过去中间化采购降低客户15%-18%成本,并配备全流…...

CVE-2021-4034深度解析:pkexec权限绕过与Linux提权原理
1. 这个漏洞不是“又一个提权”,而是Linux权限模型的照妖镜你可能已经看过几十篇讲CVE-2021-4034的文章,标题都带着“高危”“远程”“一键提权”这类字眼。但实话讲,我第一次在客户环境里复现它时,手是抖的——不是因为怕搞崩系统…...