【开源】基于Qt5的ROS1/ROS2人机交互软件(支持地图编辑/多点导航)
本项目基于Qt5开发,基于CMake进行构建,可以实现一套代码同时在ROS1/ROS2系统中使用(本项目已接入CI,保证多ROS版本/系统版本可用性)
项目地址:
https://github.com/chengyangkj/Ros_Qt5_Gui_App
软件在编译时会自动识别环境变量中的ROS1/ROS2环境并进行构建,实现ROS通信与界面隔离
软件所有功能均为自行绘制实现,因此可以轻松运行在一些性能比较低的边缘设备


功能/TODO:
| 功能 | 状态 | 备注 |
|---|---|---|
| ROS1/ROS2通信 | ✅ | |
| 全局/局部地图显示 | ✅ | |
| 机器人实时位置显示 | ✅ | |
| 机器人速度仪表盘 | ✅ | |
| 机器人手动控制 | ✅ | |
| 机器人重定位 | ✅ | |
| 机器人单点/多点导航 | ✅ | |
| 机器人全局/局部规划轨迹显示 | ✅ | |
| 机器人拓扑地图功能 | ✅ | |
| 电池电量显示 | ✅ | |
| 地图编辑功能 | ✅ | |
| 机器人导航任务链 | ✅ | |
| 地图加载 | ✅ | |
| 地图保存 | ✅ | |
| 基于protobuf的通信 | 🏷️ | |
| 鹰眼视图 | 🏷️ | |
| 3D图层显示 | 🏷️ | |
| 相机图像显示 | 🏷️ | |
| 拓扑点位的路径规划 | 🏷️ |
大家如果有什么有意思的界面/功能性需求,可以提在此处,如有Bug请提在issues,必将尽快修复!请在也欢迎大家发起Merge Request一起参与项目建设~
此仓库国内加速镜像链接:gitee
目录
文章目录
- 目录
- 一,Release 版本下载使用
- 二,编译
- 1,环境安装
- 2,克隆/下载本项目:
- 3,编译项目
- 4,运行项目
- 三,IDE配置说明(QtCreator/Vscode)
- 3.1 QtCreator打开项目教程
- 四,使用说明
- 4.1,多机通信配置
- 4.2,配置文件
- 4.3,重定位位姿态发布
- 4.4,地图编辑
- 4.4.1 拓扑地图(机器人导航点设置)
- 4.4.2 橡皮擦
- 4.4.3 画笔
- 4.4.4 线段绘制
- 4.4.5 地图保存
- 4.4.6 地图加载
- 4.5,手动控制机器人
- 4.6,速度仪表盘
- 4.7,电池电量显示
- 4.8 多点连续导航
一,Release 版本下载使用
如果您只想使用本软件,并不想了解具体的代码实现,用户可以选择下载编译好的Release版本,不用自行手动编译,下载即用
使用Release版本的前提:系统ROS环境已安装,并且source到环境变量中
本仓库使用CI自动生成各平台的Release版本(目前只有X86_64版本,Arm环境需要自行编译),在项目的Release页面下载最新对应ROS版本的Release版本,理论上解压后即可使用。
使用方法:
在终端进入解压后的文件夹路径,执行如下命令:
sudo chmod a+x ./ros_qt5_gui_app
./ros_qt5_gui_app如果Release版本下载后使用不了,可以参考二,编译进行自行编译使用
二,编译
注意,为了保证此项目同时兼容ROS1与ROS2,此项目不使用ROS1/ROS2的catkin_make/colcon构建系统进行够建,而是使用标准CMake进行构建,这也就意味着,本项目不会被ROS自动识别为功能包
可以参考以下教程从0开始构建/运行此项目:
1,环境安装
理论上只需要安装如下基础包就可以编译此项目:
sudo apt-get update
sudo apt-get install qtbase5-private-dev libqt5svg5-dev -y
如果以上安装后还不行,可以执行如下指令安装全部依赖:
sudo apt-get install qtbase5-dev qt5-qmake qtbase5-dev-tools libqt5svg5-dev qtbase5-private-dev libeigen3-dev libgtest-dev -y2,克隆/下载本项目:
mkdir -p ~/qt_ws
cd ~/qt_ws
git clone https://github.com/chengyangkj/Ros_Qt5_Gui_App
note:如果github下载过慢,可以使用以下指令从gitee拉取
git clone https://gitee.com/chengyangkj/Ros_Qt5_Gui_App3,编译项目
可以手动执行如下命令进行编译(会根据环境变量自动识别ROS1还是ROS2环境):
cd ~/qt_ws/ROS2_Qt5_Gui_App
mkdir -p build
cd build
cmake ..
make或者执行如下脚本手动指定ROS版本并进行一键编译:
cd ~/qt_ws/ROS2_Qt5_Gui_AppROS1:
sh ./build_ros1.shROS2
sh ./build_ros2.sh
4,运行项目
cd ~/qt_ws/ROS2_Qt5_Gui_App/build
./ros_qt5_gui_app软件配置文件路径(运行一次软件后会自动生成在可执行程序相对路径下):
~/qt_ws/ROS2_Qt5_Gui_App/build/config.json三,IDE配置说明(QtCreator/Vscode)
此部分为针对新手做的温馨提示,如果你已经是一个ROS/C++/Qt老手,可以跳过此部分
很多ROS初学者学习Qt都存在一个误区:拼命的去下载QtCreator,如果QtCreator有问题安装失败,就卡在这,影响学习进度,但是其实QtCreator与Vscode一样,可以把他当作一个纯文本编辑器.
实际上Ubuntu系统默认都自带的有Qt库,就比如前面的3,编译项目,并没有要求安装QtCreator,只需要使用apt-get安装一些系统缺失的,没有默认安装的qt库,就能正常编译通过
当然安装QtCreator时也会同时下载一些Qt库,但是他仅仅是下载,如果你没有将下载的库添加到环境变量中(通常也不建议自己将下载的qt库添加到环境变量中,这样需要处理系统默认的qt库与你添加的qt库的冲突问题),所以,在没有额外配置的情况下,虽然下载了QtCreator,但是在编译代码时用的还是系统默认的库.
那么,我们为什么还要去额外下载QtCreator呢?
因为我们需要使用QtCreator去编辑我们的(.ui),(.resource)文件
本项目所有的界面,都是在代码中去手动创建,如果打开代码中的mainwindow.ui可以发现什么都没有,因为所有界面都是代码动态创建添加上去的.
本人在开发本项目的流程为:
- 使用系统的Qt库,如果需要使用的qt库不存在,则使用apt-get安装即可
- 所有ui界面均使用代码动态创建,并添加到主窗口中,没有使用qtcreator拖拽生成
- 项目的开发IDE使用vscode,仅安装了基础的c/c++插件做代码提示
- 如果需要编辑资源文件(.qrc),手动打开qtcreator,再打开qrc文件进行编辑保存
- 编译时在终端使用make指令进行编译
- 运行时在终端使用./ros_qt5_gui_app指令进行运行
可以发现,开发此项目只有需要编辑资源文件时才会用到QtCreator(一般图片添加上去后也不会做频繁的编辑)
虽然本人开发使用的Vscode,但是为了方便部分习惯使用QtCreator做开发的用户,这里介绍下如果使用QtCreator作为IDE开发此项目:
3.1 QtCreator打开项目教程
首先需要按照3,编译项目将项目成功编译,如果编译失败,则QtCreator打开后项目不会正常展开
本项目为标准CMake项目,因此按照在QtCreator中打开CMake项目的方式,打开本项目的根目录Cmakelist.txt即可(不区分ROS1/ROS2)
- 1.安装QtCreator
sudo apt-get install qtcreator- 2.打开qtcreator
终端输入(必须终端打开):
qtcretor
打开后选择文件->打开文件或项目:

接着选择项目根目录下的Cmakelist.txt文件,点击打开即可:

接着会自动识别我们前面编译的build目录,选择config:

项目成功展开,点击绿色三角形编译并运行:

四,使用说明
4.1,多机通信配置
针对于ROS新手的温馨提示:此项配置,如果是单机使用即本软件运行在机器人身上,没有跨机器使用就不用配置,直接跳过即可.如果需要将本软件运行在自己的笔记本上,去连接远程的机器人的情况下需要进行配置
ROS1/ROS2的多机通信完全依赖ROS原生(环境变量添加ROS_MASTER_URI与ROS_IP/ROS_DOMAINID),不再由用户手动指定,减轻新手使用负担
ROS1:
配置参考:多机通讯教程csdn 博客
ROS2:
环境变量多机配置相同的ROS_DOMAINID
4.2,配置文件
第一次运行后,会在可执行程序同级目录生成config.json,修改此配置文件即可(需要注意Json格式),修改后重启生效,具体配置说明详见配置文件说明
4.3,重定位位姿态发布
程序可以拖动式的设置机器人初始位置(重定位),相对于Rviz,拖动时可以实时查看激光匹配情况,重定位更加精准(左键按住拖动,右键旋转方向)

注意:如果设置无效,需要检查config.json中设置:
{"display_name": "Reloc","topic": "/initialpose","enable": true
}
为自己机器人监听的重定位Topic名称
4.4,地图编辑
程序支持地图编辑功能:


4.4.1 拓扑地图(机器人导航点设置)
并且程序支持拓扑地图功能,可以拖动式的设置机器人导航目标点(导航)使用gif说明如下:

注意:如果导航点位发布无响应设置无效,需要检查config.json中设置:
{"display_name": "NavGoal","topic": "/move_base_simple/goal","enable": true
}
为自己机器人监听的导航目标点Topic名称
4.4.2 橡皮擦
点击橡皮擦后,可以擦除地图中的障碍物,使用gif说明如下:

4.4.3 画笔
画笔功能

4.4.4 线段绘制
线段绘制

4.4.5 地图保存
地图编辑完成后并不会自动保存,需要点击保存按钮,保存地图到指定文件夹,如果需要在ROS中使用,需要将该地图替换到自己对应导航包的map中
目前保存地图有如下:
- *.pgm 图片数据
- *.yaml 地图描述文件
- *.topology 程序自定义的拓扑地图 保存了点位等信息

4.4.6 地图加载
地图加载同理 用户选择对应的PGM地图文件即可加载,并进行编辑
4.5,手动控制机器人
软件支持发布实时速度到底盘

对应按钮上的文字,可以由键盘对应按钮同步调用
注意:如果设置无效,需要检查config.json中设置:
{"display_name": "Speed","topic": "/cmd_vel","enable": true
}为实际机器人监听的速度控制话题
4.6,速度仪表盘
软件支持实时显示机器人速度
注意:如果设置无效,需要检查config.json中设置:
{"display_name": "Odometry","topic": "/odom","enable": true
}
为机器人时机发布的里程计话题
4.7,电池电量显示
软件支持实时显示机器人电量,在配置中配置话题名,电池电量的Topic类型为:sensor_msgs::BatteryState
{"display_name": "Battery","topic": "/battery","enable": true
}
4.8 多点连续导航
软件支持多点连续导航,使用方法如下:

点击Start Task Chain即可开始任务
相关文章:
【开源】基于Qt5的ROS1/ROS2人机交互软件(支持地图编辑/多点导航)
本项目基于Qt5开发,基于CMake进行构建,可以实现一套代码同时在ROS1/ROS2系统中使用(本项目已接入CI,保证多ROS版本/系统版本可用性) 项目地址: https://github.com/chengyangkj/Ros_Qt5_Gui_App 软件在编译时会自动识别环境变量中的ROS1/ROS…...

Spring和SpringBoot的区别是什么
Spring 和 Spring Boot 是 Java 开发领域内两个极其重要且紧密相关的框架,它们各自在企业级应用开发中扮演着不同的角色,并带来了一系列革新性的变化。以下是关于两者之间主要区别的详细分析: 一、设计理念与定位 Spring Framework Spring 是…...
布局技巧及CSS初始化
一,margin负值巧妙应用 二,文字围绕浮动元素 三,行内块 四,CSS三角强化 五,CSS初始化 一,margin负值巧妙应用 制作盒子的细线边框: 鼠标经过li后变色: 二,文字围绕…...
excel怎么设置密码?轻松保护您的工作表
在数字化时代,数据的安全性显得尤为重要。excel作为我们日常工作中广泛使用的办公软件,其中可能包含了大量的敏感数据。为了确保这些数据不被未授权的人访问,本文将为您详细介绍excel怎么设置密码,从而有效地保护您的数据安全。 方…...
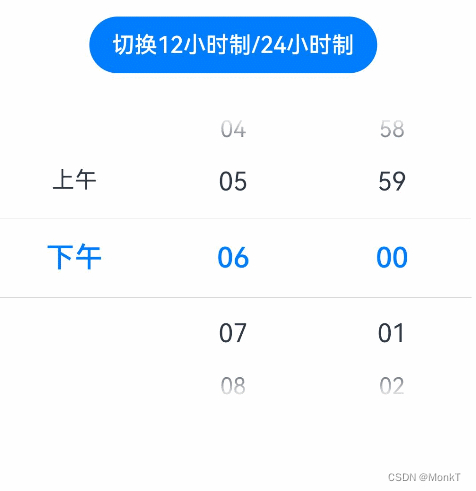
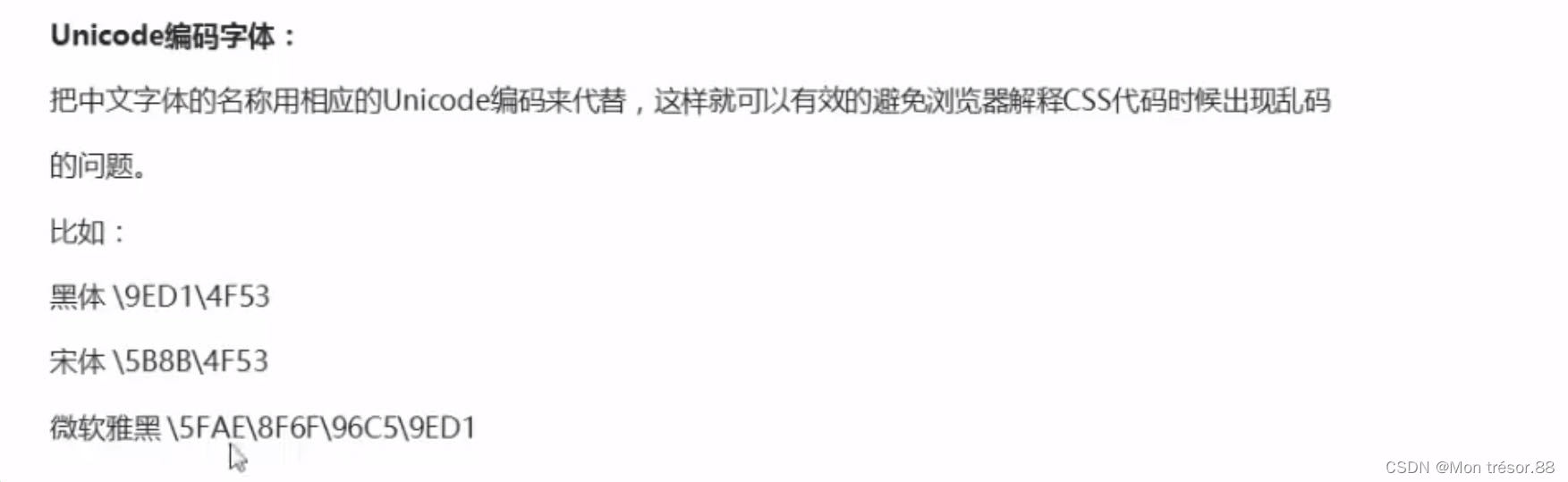
鸿蒙(HarmonyOS)项目方舟框架(ArkUI)之TimePicker组件
鸿蒙(HarmonyOS)项目方舟框架(ArkUI)之TimePicker组件 一、操作环境 操作系统: Windows 10 专业版、IDE:DevEco Studio 3.1、SDK:HarmonyOS 3.1 二、TimePicker组件 TextClock组件通过文本将当前系统时间显示在设备上。支持不…...
Springboot集成Camunda并完成一条流程实例
💖专栏简介 ✔️本专栏将从Camunda(卡蒙达) 7中的关键概念到实现中国式工作流相关功能。 ✔️文章中只包含演示核心代码及测试数据,完整代码可查看作者的开源项目snail-camunda ✔️请给snail-camunda 点颗星吧😘 💖设计流程定…...

宠物用品/宠物自动饮水机方案
宠物自动饮水机方案原理 宠物自动饮水机,也叫做智能宠物饮水机,是一种为宠物设计的智能化饮水器。应用核心主要在于智能化水泵控制,以及外围传感器电路。 宠物自动饮水机使用方便,不用频繁的换水。另外,自来水的水质可…...

git小白进阶之路
git是最常用的版本控制工具,我对其进行了整理后续补充,这个文档欢迎大家来讨论,当前我的视频梳理: git小白进阶之路_哔哩哔哩_bilibili,非常希望大佬们能够批评指正,并多多交流。 目录 初始配置 配置账号…...
哈希表——C++
目录 一、首先使用拉链法: 二、开放寻址法 三、字符串哈希 1.具体如何使用进制的方式来存储字符前缀的可以看这个y总的这个图 2.接下来说一说算某个中间的区间的字符串哈希值 哈希表是一种数组之间互相映射的数据结构,比如举个简单的例子一个十个的数…...

LabVIEW叶片厚度远程监控
LabVIEW叶片厚度远程监控 随着网络技术的高速发展,远程监控广泛应用在各个领域。本文介绍了一种基于LabVIEW的植物叶片厚度远程监控系统,旨在实现对植物生长状况的精准监测和分析。 该系统利用LabVIEW软件开发工具,通过TCP网络协议实现数据…...

el-table动态合并
废话就不多说了,直接上代码!!! 合并行 // 方法一 <template><div class"container"><el-table :data"dataSource" :border"true":header-cell-style"{ font-weight: normal,…...
【DevOps】产品需求文档(PRD)与常见原型软件
文章目录 1、PRD介绍1.1、概述1.2、前提条件1.3、主要目的1.4、关键内容1.5、表述方式1.6、需求评审人员1.7、一般内容结构 2、需求流程3、常见原型软件3.1、Word3.2、Axure3.2.1、详细介绍3.2.2、应用分类3.2.3、优缺点 3.3、摹客RP3.4、蓝湖3.5、GUI Design Studio 1、PRD介绍…...
)
【QT+QGIS跨平台编译】之十八:【Expat+Qt跨平台编译】(一套代码、一套框架,跨平台编译)
文章目录 一、Expat介绍二、文件下载三、文件分析四、pro文件五、编译实践一、Expat介绍 Expat库最初由James Clark创建,已经成为许多编程语言中常用的XML解析工具。它以其简单、快速和可靠的特点而受到广泛的认可和使用。 Expat库的优点包括: 快速:Expat的解析速度非常快…...

20240203
1.项目经理正在为新项目制订进度计划,项目的成功取决于使用需要政府颁发特殊环境许可证的设备,在网络图的设计过程中,项目经理应该做什么以确保正确的活动排序? A.使用滚动式规划考虑项目不确定性 B.分析外部依赖关系,…...
【Spark实践6】特征转换FeatureTransformers实践Scala版--补充算子
本节介绍了用于处理特征的算法,大致可以分为以下几组: 提取(Extraction):从“原始”数据中提取特征。转换(Transformation):缩放、转换或修改特征。选择(Selection&…...
【知识点】设计模式
创建型 单例模式 Singleton:确保一个类只有一个实例,并提供该实例的全局访问点 使用一个私有构造方法、一个私有静态变量以及一个公有静态方法来实现。私有构造方法确保了不能通过构造方法来创建对象实例,只能通过公有静态方法返回唯一的私…...
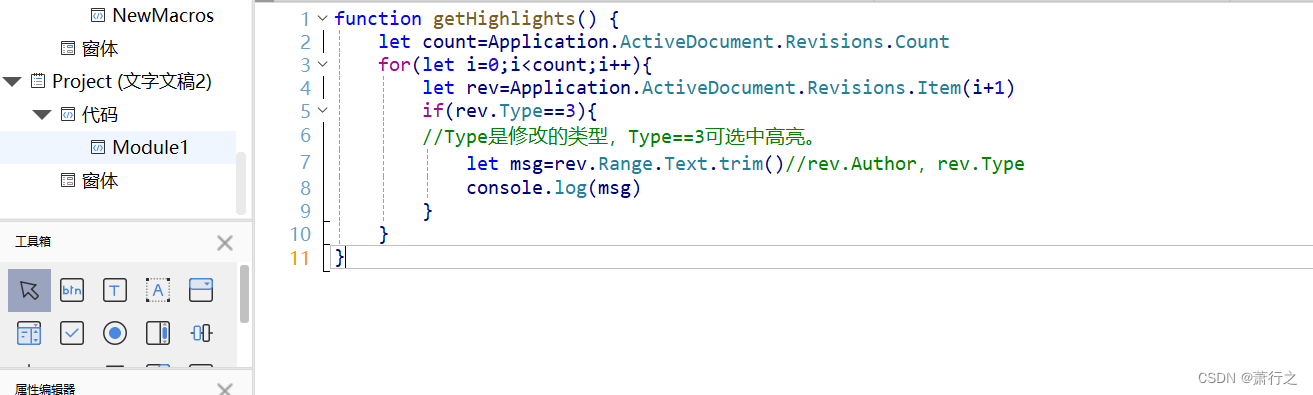
WPS WORD 宏导出高亮文本
WPS手机版可以直接导出高亮文本,但只能导出手机编辑的部分,如果同时在电脑上编辑过,电脑上高亮的无法导出,因为作者不一样。 但WPS电脑版没有这个功能,只能通过宏编程实现。 这里利用了审阅模式,在文字高亮…...
python 基础知识点(蓝桥杯python科目个人复习计划32)
今日复习内容:基础算法中的位运算 1.简介 位运算就是对二进制进行操作的运算方式,分为与运算,或运算,异或运算,取反,左移和右移。 (1)与运算 xyx&y000010100111 (2)或运算 …...
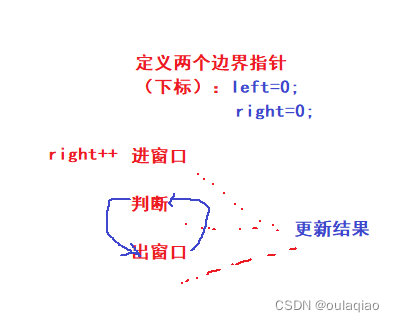
(算法二)滑动窗口
滑动窗口:既一块区域进行滑动,且不回退 往往解决的是一段连续空间中满足条件的最长或者最短子数组(串) 是由暴力解法(优化)——>不回退的滑动窗口解法 长度最小的子数组 无重复字符的最长子数组 此类题…...

【Go语言成长之路】Hello Go
文章目录 Hello Go一、建立工程目录二、开启代码追踪三、编写代码四、测试代码 Hello Go 一、建立工程目录 pzspzs-ubuntu22:~$ mkdir go_study/hello -p pzspzs-ubuntu22:~$ cd go_study/hello 在hello目录下,我们会编写属于自己的第一个Go demo例子࿰…...

中小企业福音:Qwen3-14B私有化部署全流程,轻松搞定智能客服与文档处理
中小企业福音:Qwen3-14B私有化部署全流程,轻松搞定智能客服与文档处理 1. 为什么选择Qwen3-14B 对于中小企业来说,部署AI模型往往面临两难选择:公有云API担心数据安全,自研模型又缺乏技术实力。Qwen3-14B正好填补了这…...

Xinference-v1.17.1在Ubuntu上的实战应用:从环境准备到模型推理
Xinference-v1.17.1在Ubuntu上的实战应用:从环境准备到模型推理 1. 引言 Xinference作为一款开源AI模型推理平台,其1.17.1版本在Ubuntu系统上的表现尤为出色。本文将带你从零开始,完成在Ubuntu系统上部署Xinference并运行各类AI模型的完整流…...

“我被降薪 10%,主管让我别着急,降薪总比被裁员好,结果2个月后,主管被降薪25%,他不接受,说自己每个月房贷要5000多呢”
听说你被降薪了,主管还跑来安慰你?说什么“降薪总比裁员好,要懂得感恩”?我跟你讲,这种话,但凡你信一个字,都是对你智商的侮辱。这就是职场版的PUA,给你一巴掌,还得让你笑…...

openclaw部署oauth模式codex无法正常登录
windows: openclaw onboard --auth-choice openai-codex 执行后,codex浏览器可以登录,但是终端中返回403 这里报错可以看到是region不符合,可以看下vpn中是否开启了tun模式,开启后可以测试一下地区 curl.exe https:/…...

LiuJuan20260223Zimage国风美学生成模型v1.0入门:Node.js环境调用与API开发
LiuJuan国风美学生成模型v1.0入门:Node.js环境调用与API开发 最近在尝试一些AI图像生成项目,发现很多模型对中文场景和东方美学的支持还不够好。直到我遇到了LiuJuan国风美学模型,它专门针对国风、古风、东方元素进行优化,生成的…...

告别CUDA!用OpenAI Triton写GPU Kernel,Python开发者也能玩转高性能计算
用Python解锁GPU算力:OpenAI Triton实战指南 当Python遇上GPU计算,传统路径总是绕不开CUDA C的陡峭学习曲线。但现在,OpenAI Triton正在改写这一规则——它让开发者能够用熟悉的Python语法编写高性能GPU内核,像操作NumPy数组一样自…...

Qwen3-ForcedAligner-0.6B与Python爬虫结合:自动采集语音数据并对齐
Qwen3-ForcedAligner-0.6B与Python爬虫结合:自动采集语音数据并对齐 1. 引言 语音数据处理一直是人工智能领域的热门话题,但很多开发者在实际项目中都会遇到这样的问题:如何快速获取大量的语音数据?如何让文本和语音精确对齐&am…...

OpenClaw环境隔离方案:用Docker部署Qwen3-4B-Thinking-2507-GPT-5-Codex-Distill-GGUF避免依赖冲突
OpenClaw环境隔离方案:用Docker部署Qwen3-4B-Thinking-2507-GPT-5-Codex-Distill-GGUF避免依赖冲突 1. 为什么需要Docker环境隔离 去年我在本地尝试部署OpenClaw时,最头疼的问题就是Python依赖冲突。当时为了同时运行OpenClaw和一个本地大模型…...

Swin2SR在Linux系统下的部署与优化指南
Swin2SR在Linux系统下的部署与优化指南 本文详细讲解如何在Linux系统中部署和优化Swin2SR超分辨率模型,从环境配置到性能调优,提供完整的实践指南。 1. 引言 如果你正在寻找一种方法让低分辨率图像变得清晰锐利,Swin2SR可能是你需要的解决方…...

深入FreeRTOS SMP调度器:主核与从核如何“默契配合”完成第一次任务切换?
深入FreeRTOS SMP调度器:主核与从核如何“默契配合”完成第一次任务切换? 在嵌入式系统开发中,实时操作系统(RTOS)的多核支持已成为提升性能的关键。FreeRTOS作为业界广泛采用的RTOS,其SMP(对称…...