ROS方向第二次汇报(5)
文章目录
- 1.本方向内学习内容:
- 1.1.自定义msg:
- 1.1.1.定义msg文件:
- 1.1.2.编辑配置文件:
- 1.2.自定义srv:
- 1.2.1.定义srv文件:
- 1.2.2.编辑配置文件:
- 1.3.服务通信案例实现:
- 1.3.1.服务端实现:
- 重点语法、接口等的复现与记忆以及一些注意事项:
- 1.3.1.客户端实现:
- 重点语法、接口等的复现与记忆以及一些注意事项:
- 1.4.参数服务器:
- 1.5.URDF集成Rviz基本流程:
- 1.5.1.新建功能包,导入依赖:
- 1.5.2.编写urdf文件:
- 1.5.3.在launch文件集成URDF与Rviz:
- 1.5.4.在Rviz中显示机器人模型:
- 1.6.再识URDF标签:
- 1.6.1.link:
- visual(描述外观):
- geometry(设置连杆形状):
- origin(设置偏移量与倾斜角度):
- material(设置颜色):
- 碰撞参数等:
- 1.6.2.joint:
- parent (必须):
- child link:
- origin:
- axis:(需要转动的关节需要设置这个参数)
- 1.6.3. 完成小车仿真并加载到launch文件中:
- 1.6.4.base_footprint优化urdf:
1.本方向内学习内容:
1.1.自定义msg:
1.1.1.定义msg文件:
功能包下新建msg目录,添加文件 Person.msg。
string name
uint16 age
float64 height
1.1.2.编辑配置文件:
package.xml中添加编译依赖与执行依赖
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
CMakeLists.txt编辑msg相关配置
1.
find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgs #std_msgs必须有message_generation #添加编译时依赖,加入这个
)
#配置msg源文件
add_message_files(FILESPerson.msg #添加创建的msg源文件)
#生成消息时依赖于std_msgs
generate_messages(DEPENDENCIESstd_msgs#添加std_msgs依赖)
去掉该依赖的注释。
4.
#执行时依赖
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES plumbing_pub_subCATKIN_DEPENDS roscpp rospy std_msgs message_runtime#加上message_runtime
# DEPENDS system_lib
)
只放开CATKIN_DEPENDS一句,并加上message_runtime即可。
1.2.自定义srv:
srv=请求+相应
1.2.1.定义srv文件:
功能包下新建srv目录,添加xxx.srv文件:
int32 num1
int32 num2
---
int32 sum
注意:一定要按照格式来创建,三个-分割线不能少。上面是请求,下面是应答,注意顺序。
1.2.2.编辑配置文件:
与msg编辑配置文件相同。
package.xml中添加编译依赖与执行依赖
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
CMakeLists.txt编辑msg相关配置
1.
find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgs #std_msgs必须有message_generation #添加编译时依赖,加入这个
)
#配置msg源文件
add_message_files(FILESAddints.srv #添加创建的srv源文件)
#生成消息时依赖于std_msgs
generate_messages(DEPENDENCIESstd_msgs#添加std_msgs依赖)
去掉该依赖的注释。
4.
#执行时依赖
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES plumbing_pub_subCATKIN_DEPENDS roscpp rospy std_msgs message_runtime#加上message_runtime
# DEPENDS system_lib
)
只放开CATKIN_DEPENDS一句,并加上message_runtime即可。
1.3.服务通信案例实现:
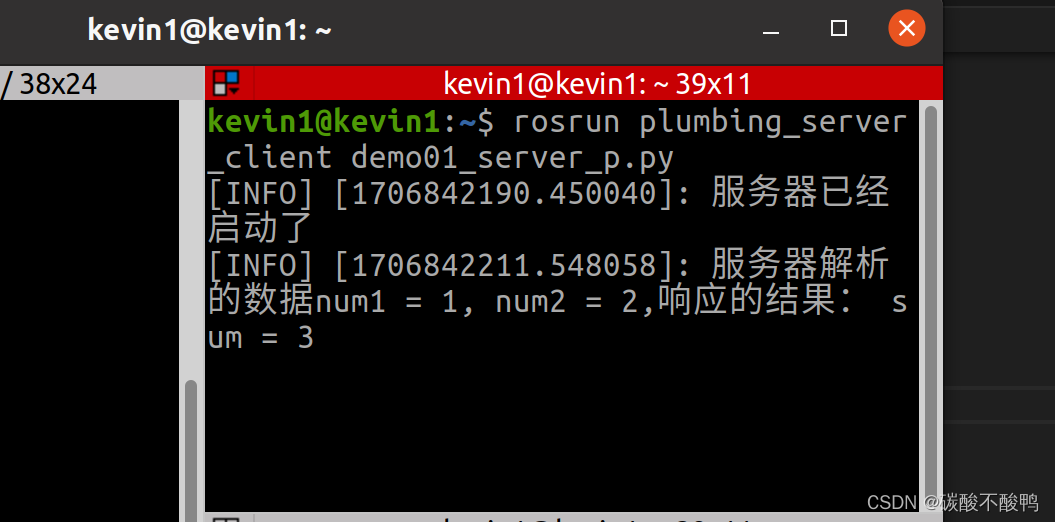
1.3.1.服务端实现:
#! usr/bin/env python import rospy
from plumbing_server_client.srv import Addints,AddintsResponse,AddintsRequestdef doNum(request):num1 = request.num1num2 = request.num2sum = num1 + num2response =AddintsResponse()response.sum = sumrospy.loginfo("服务器解析的数据num1 = %d, num2 = %d,响应的结果: sum = %d",num1,num2,sum)return responsedef server():rospy.init_node("company")server = rospy.Service("addInts",Addints,doNum)rospy.loginfo("服务器已经启动了")rospy.spin()if __name__=="__main__":server()
重点语法、接口等的复现与记忆以及一些注意事项:
1.实例化服务端对象**rospy.Service("话题名",数据类,回调函数)。
2.导包的时候为了方便可以使用通配符*,需要将Response类和Request类都导入。
3.可以这么理解:AddInts是一个大数据类,而AddIntsResponse和AddIntsRequest是AddInts.srv文件编译之后产生的子类。(不准确的说是一分为二)
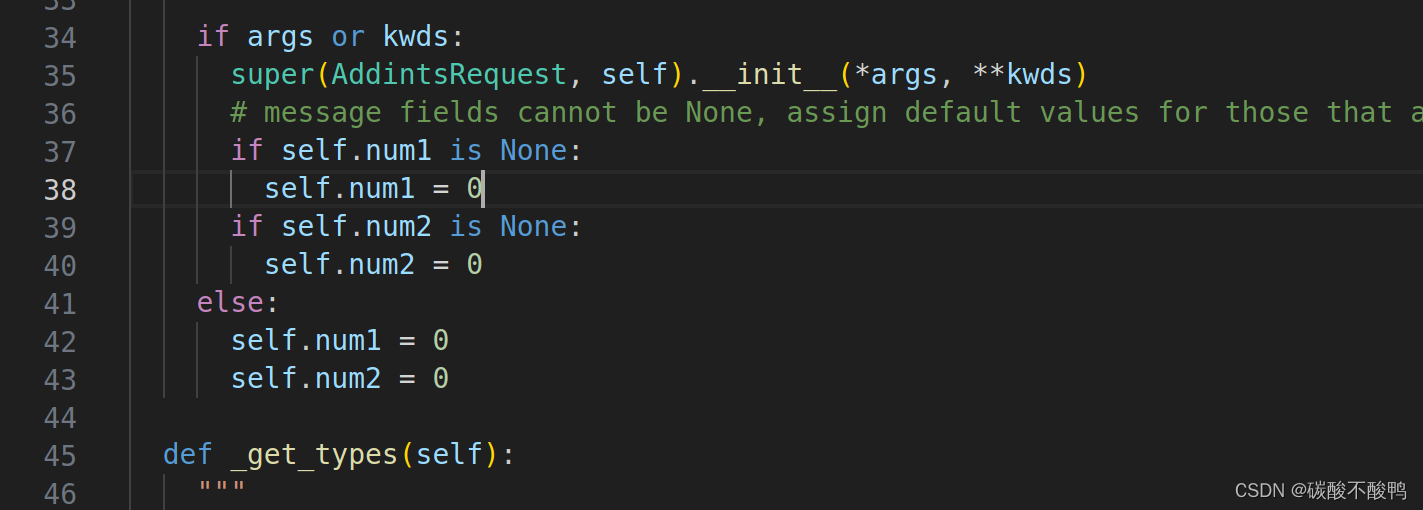
在产生的中间文件中便可发现继承关系**。所以我们在服务端是用AddIntsResponse实例化对象,在客户端用AddIntsRequest实例化对象,而不是用AddInts实例化对象。
4.回调函数自动接收的参数是请求类型的(在本例中是两个数据),然后需要将数据取出来进行处理num1 = request.num1 num2 = request.num2 sum = num1 + num2。
5.处理过后的结果放入实例化的response=AddintsResponse()对象中,然后存入处理过后的数据结果response.sum=sum,并返回response。
6.有回调函数都需要使用rospy.spin()。
1.3.1.客户端实现:
#! usr/bin/env pythonimport rospy
from plumbing_server_client.srv import *
import sys# ROS中内置了相关函数,这些函数可以判断服务器的状态,如果服务没有启动,那么就让客户端挂起。def client():if len(sys.argv)!=3 :#包括一个默认的参数rospy.loginfo("传入的参数个数有误")sys.exit(1)rospy.init_node("me")client = rospy.ServiceProxy("addInts",Addints) #实例化客户端对象num1 = int (sys.argv[1])num2 = int (sys.argv[2])#等待服务器启动client.wait_for_service()#如果用rospy.wait_for_service("这里面需要话题名称")response = client.call(num1,num2)#组织请求数据,并发送请求,接收响应数据rospy.loginfo("响应的数据:%d",response.sum)# 处理响应if __name__=="__main__":client()
重点语法、接口等的复现与记忆以及一些注意事项:
1.实例化客户端对象client=rospy.ServiceProxy("话题名",数据类),注意这里不是rospy.client,它是一个方法。
2.组织请求数据,并发送请求,接收相应数据。用已经实例化的客户端对象client.call(num1,num2),接收数据response=client.call(num1,num2)
优化:
3.从终端中传入参数:导入sys包,判断参数是否为三个(第一个参数为文件名,加上两个数字应该是三个)
if len(sys.argv)!=3 :#包括一个默认的参数rospy.loginfo("传入的参数个数有误")sys.exit(1)
不满足条件就打印错误日志信息并退出。len(sys.args)用来获取终端中传入的参数个数,sys.argv是一个列表(list)/数组,里面存放参数(字符),所以取出的时候应该使用下标引用操作符并进行强制转换。
num1 = int (sys.argv[1])num2 = int (sys.argv[2])
4.解决先打开客户端抛出异常的问题:
client.wait_for_service()#如果用rospy.wait_for_service("这里面需要话题名称")
加在发送请求前即可。
1.4.参数服务器:
1.设置参数:
rospy.set_param("参数名(键)",value(值))
如:
rospy.set_param("type_p","car")rospy.set_param("radius_p",0.15)
复用可以实现覆盖(修改)
查看参数列表:
rosparam list
查看参数值:
rosparam get <参数名>
2.查询参数:
相关函数有:(rospy包中)
1.
get_param(“参数名”,默认值)#当参数存在时,返回对应的值,不存在返回默认值。
2.get_param_cached(“参数名”,默认值),与get_param使用方法一致,只是效率更高。
3.get_param_names(),获取所有参数名(键)的集合,可用for names in names来遍历输出。
4.has_param("参数名"),判断某个参数是否存在,返回true or false
5.search_param("参数名"),查找某个参数的键(/参数名)
3.删除参数:
rospy.delete_param("参数名")
1.5.URDF集成Rviz基本流程:
1.5.1.新建功能包,导入依赖:

由于不涉及编写py/cpp文件,所以不需要导入roscpp、rospy等功能包。需要导入urdf、xacro依赖。
在功能包路径下创建以下四个文件夹。
1.5.2.编写urdf文件:
<robot name="myCar"><link name="base_link"><visual><geometry><box size="0.5 0.2 0.1"/></geometry></visual></link>
</robot>
一定要要注意/的位置!!!!!!!!!
1.5.3.在launch文件集成URDF与Rviz:
<launch><!-- 在参数服务器载入urdf文件 --><param name="robot_description" textfile="$(find urdf01_rviz)/urdf/car.urdf"/><!-- 启动Rviz --><node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdf01_rviz)/config/show_myCar.rviz "/></launch>
------------------------ 在参数服务器载入urdf文件 ------------------------
robot name固定(robot_description),文件路径格式:$(find 包名)路径到文件
--------------------------------- 启动Rviz ---------------------------------
pkg、type、name都是rviz,后面的args是rviz配置文件的路径,该配置文件最好放在当前功能包下的config文件夹中。
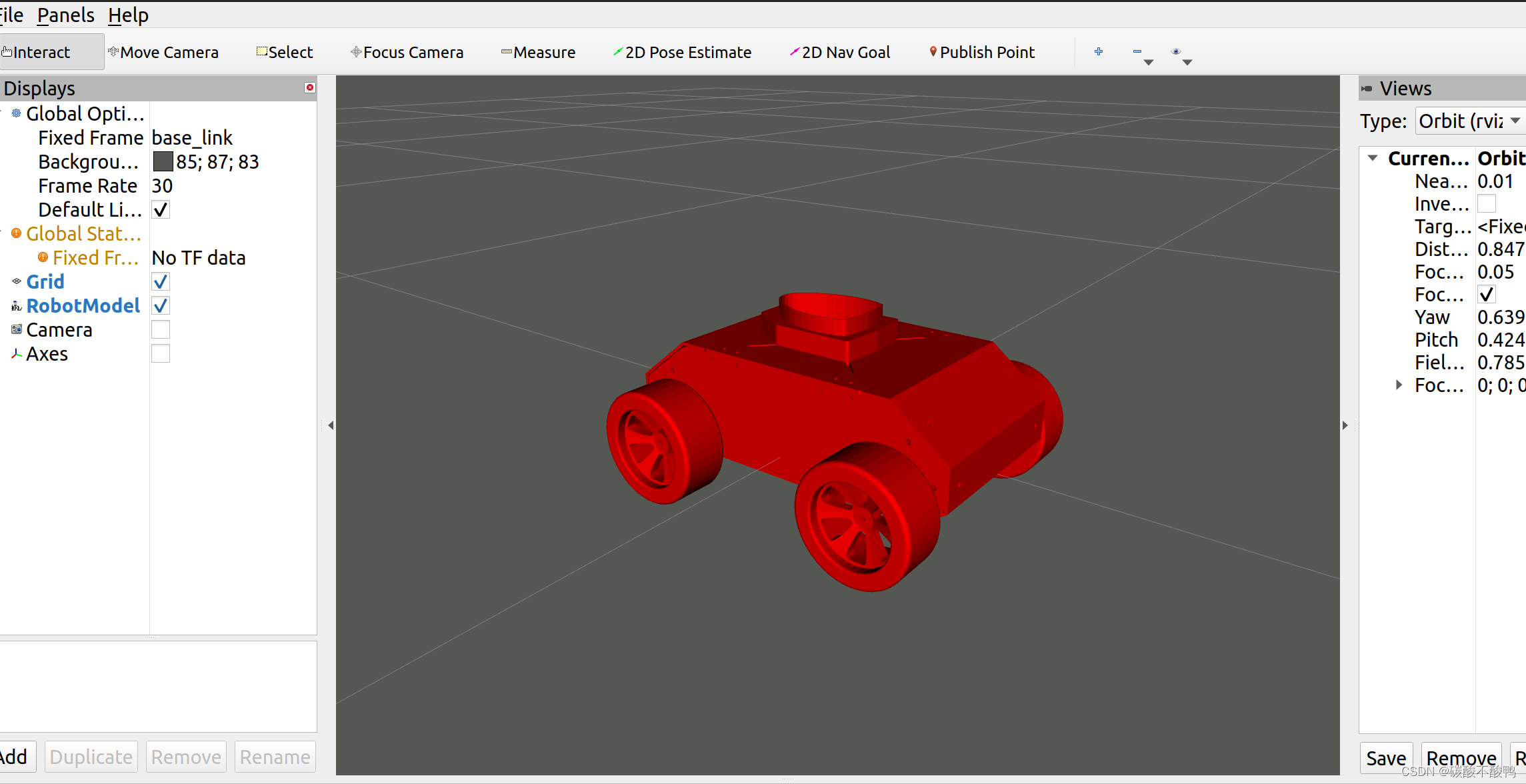
1.5.4.在Rviz中显示机器人模型:
用roslaunch启动。
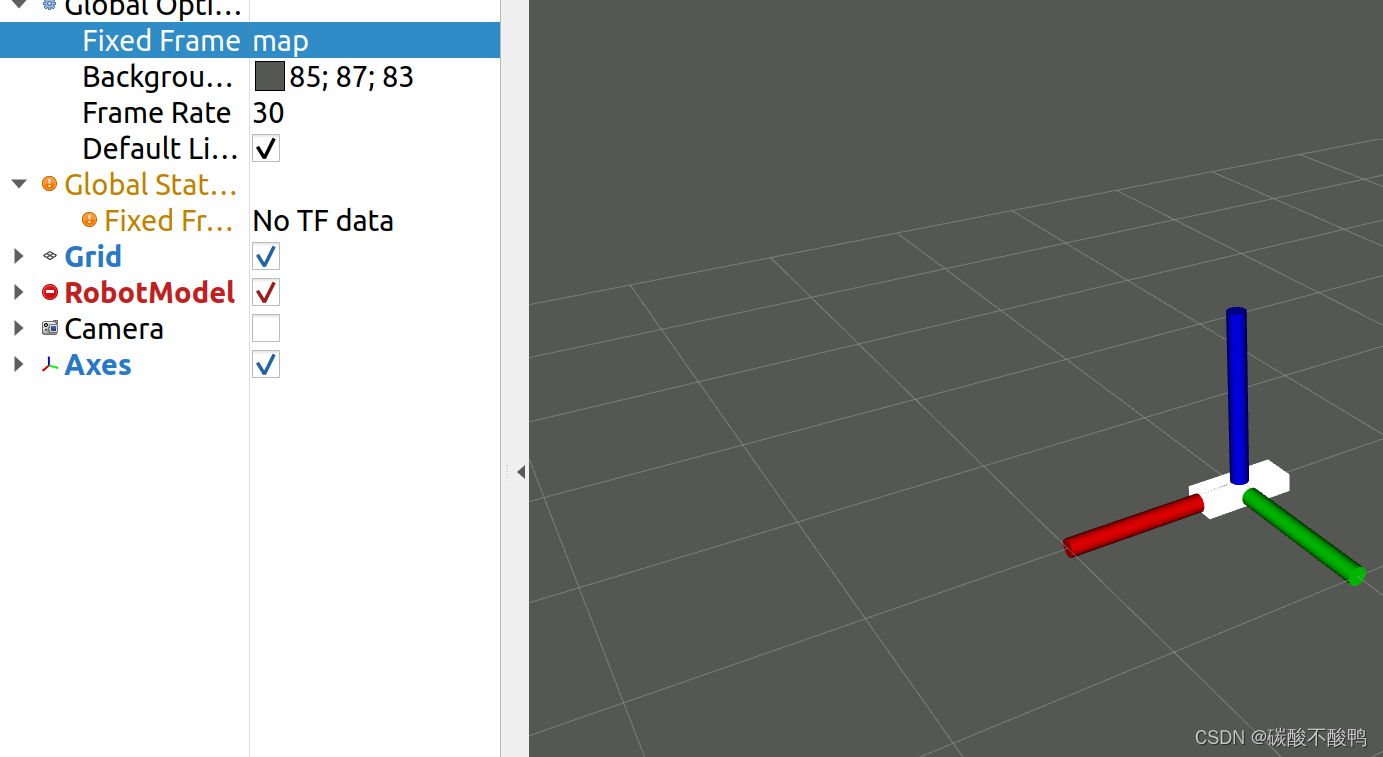
添加RobotModel、Axes,然后将FIxed Frame设置为base_link
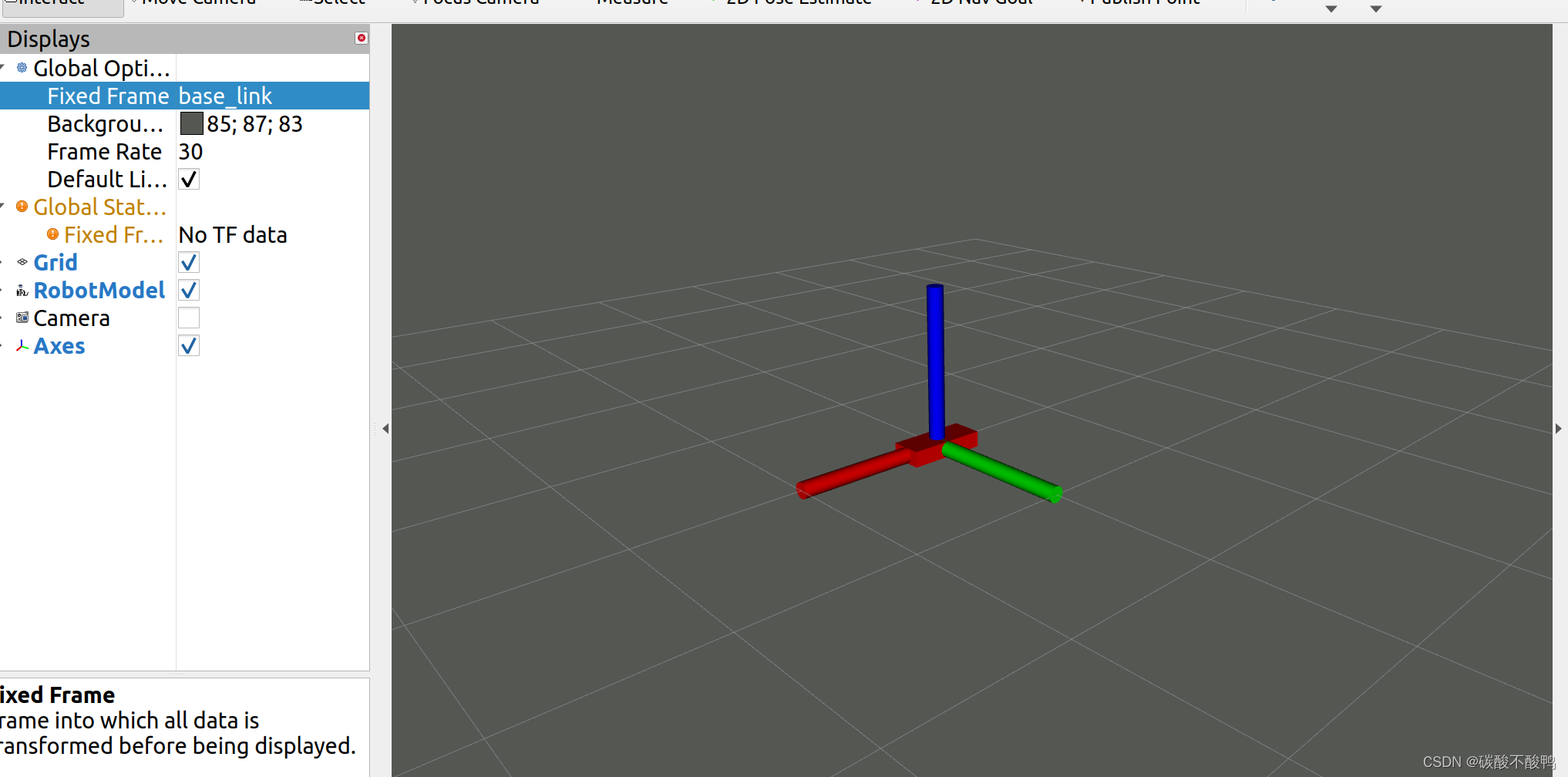
成功显示模型。
1.6.再识URDF标签:
成双标签/加在第二个最前面,单标签/加在最后面。
1.6.1.link:
link和robot标签都有name的属性。
visual(描述外观):
geometry(设置连杆形状):
标签1:
box(盒状),属性:size=“长 宽 高”
标签2:
cylinder(圆柱),属性:radius="半径 length=“高”
标签3:
sphere(球体),属性:radius=“半径”
标签4:
mesh(为连杆添加皮肤),属性filename=“路径”(格式:package://功能包名/路径到文件)
origin(设置偏移量与倾斜角度):
属性1:
xyz="x偏移 y偏移 z偏移 "
属性2:
rpy=“x翻滚量 y俯仰量 z偏航量”(单位是弧度)
material(设置颜色):
material含有name属性。
标签1:
color,属性rgba(红绿蓝透明度)=“x y z a”(四者取值[0,1])
碰撞参数等:
后续介绍。
1.6.2.joint:
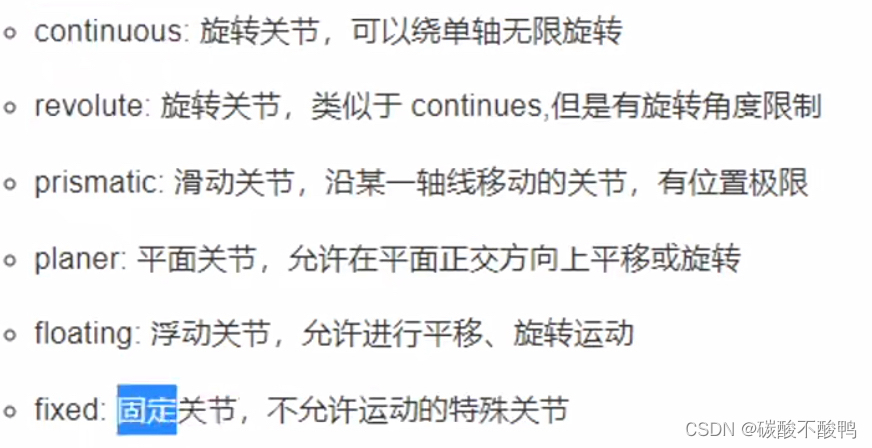
有两个属性:name和type
其中type包括:
parent (必须):
属性:
link=“父link名”
child link:
属性:
link=“子link名”
origin:
属性:
xyz=“x y z”(各轴线上的偏移量) rpy=“r p y”(各轴线上的偏移弧度)
axis:(需要转动的关节需要设置这个参数)
属性:
**xyz用于设置围绕哪个轴运动。**xyz=“ 0 0 1 ”表示绕z轴旋转
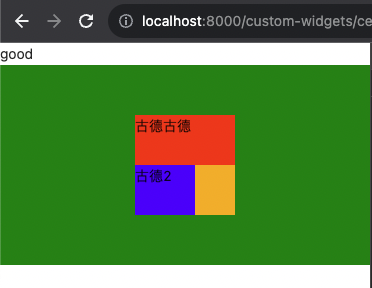
1.6.3. 完成小车仿真并加载到launch文件中:
编写urdf文件:
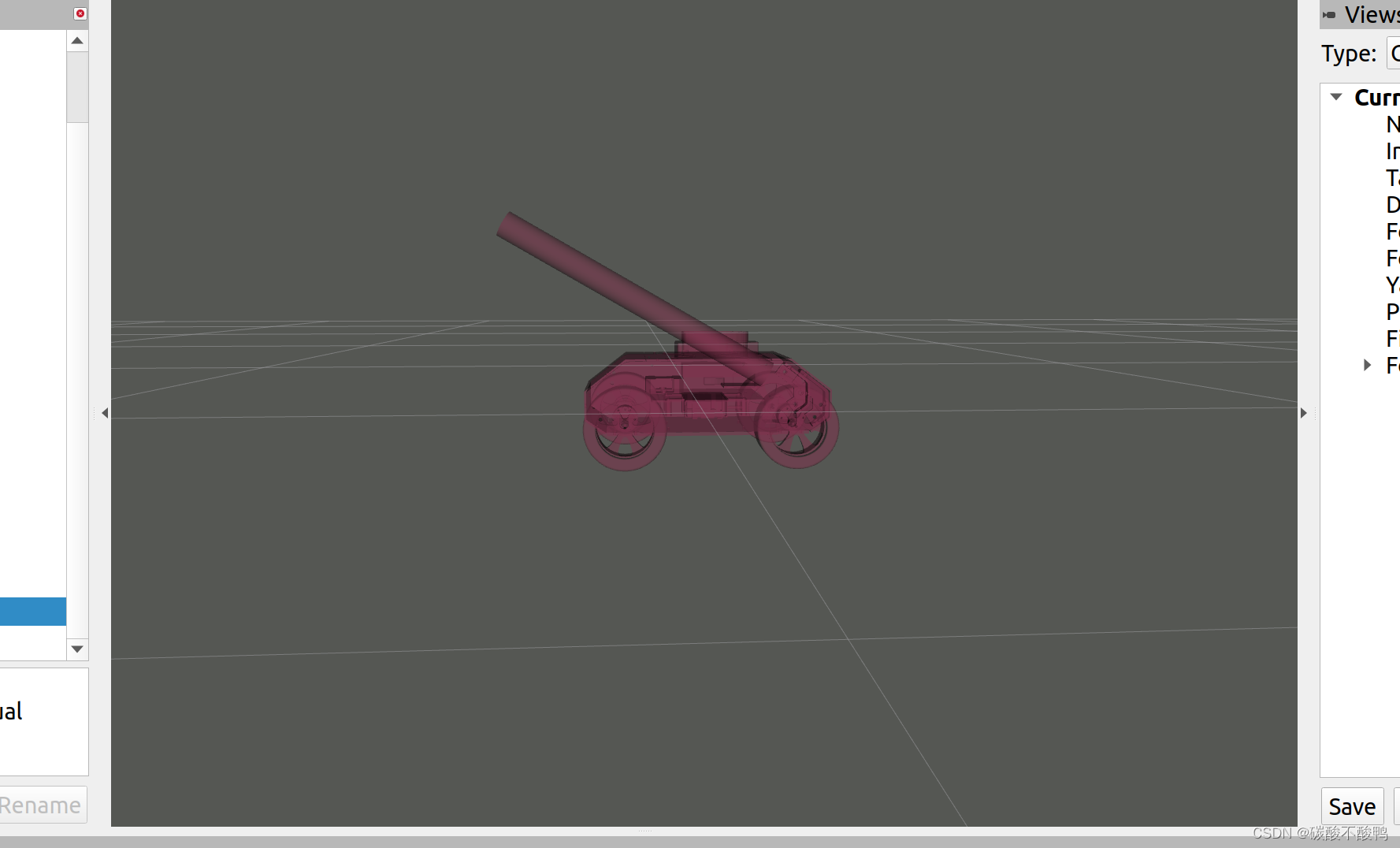
小炮车(mesh)
0.17" rpy="0.0 1.05 1.57"/></joint><link name="paoGuan"><visual><geometry><cylinder radius="0.02" length="0.45"/></geometry><material name="color"><color rgba="1.0 0.2 0.3 0.55"/></material> </visual></link>
</robot>
简陋小车:(带camera)
<robot name="myCar"><link name="base_link"><visual><geometry><box size="0.3 0.2 0.1"/></geometry><origin xyz="0 0 0" rpy="0 0 0"/><material name="color"><color rgba="0.8 0.5 0.0 0.5"/></material></visual></link><link name="cam"><visual><geometry><box size="0.02 0.05 0.05"/></geometry><origin xyz="0.0 0.0 0.025" rpy="0.0 0.0 0.0"/><material name="cam_color"><color rgba="0 0 1 0.5"/></material></visual></link><joint name="camera2Base" type="continuous"><parent link="base_link"/><child link="cam"/><origin xyz="0.12 0 0.05" rpy="0.0 0.0 0.0"/><axis xyz="0 0 1"/> </joint>
</robot>
1.关节优先:
关节的位置确定了子连杆和父连杆的相对位置关系,关节的参考系是主参考系,而子连杆的参考系是以关节为中心的参考系。
2.配置机器人状态发布者及相关节点:
要成功显示机器人模型,需要在launch文件中添加:
<node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher"/>
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher"/>
如果要查看机器人关节旋转效果,需要在launch文件中添加:
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher"/>
并注释关节信息发布节点(解决cam抖动的问题)。
3.关节中心(位置)默认与父连杆中心重合
1.6.4.base_footprint优化urdf:
默认情况下,底盘中心点位于地图原点上,所以会导致机器人模型半沉入地下,可以使用优化策略,将初始link设置为一个尺寸极小的link(如半径为0.001m的球体或边长为0.001的立方体),然后再在初始link上添加底盘等刚体,这样实现,虽然仍然存在半沉现象,但可以基本忽略。
添加初始link:
<link name="base_footprint"><visual><geometry><box size="0.001 0.001 0.001"/></geometry><origin xyz="0 0 0" rpy="0 0 0"/><material name="color"><color rgba="0.8 0.5 0.0 0.5"/></material></visual></link>
添加关节:
<joint name="fp" type="fixed"><parent link="base_footprint"/><child link="base_link"/><origin xyz="0 0 0.05" rpy="0.0 0.0 0.0"/></joint>
注意将base_footprint作为父连杆。
相关文章:
ROS方向第二次汇报(5)
文章目录 1.本方向内学习内容:1.1.自定义msg:1.1.1.定义msg文件:1.1.2.编辑配置文件: 1.2.自定义srv:1.2.1.定义srv文件:1.2.2.编辑配置文件: 1.3.服务通信案例实现:1.3.1.服务端实现…...

C# 浅克隆与深克隆
在C#中,浅克隆(Shallow Clone)和深克隆(Deep Clone)是两种常见的对象克隆技术,用于创建对象的新副本。 它们的主要区别在于复制对象的层次和属性的处理方式。 浅克隆(Shallow Copy)…...

Shell 正则表达式及综合案例及文本处理工具
目录 一、常规匹配 二、常用特殊字符 三、匹配手机号 四、案例之归档文件 五、案例之定时归档文件 六、Shell文本处理工具 1. cut工具 2. awk工具 一、常规匹配 一串不包含特殊字符的正则表达式匹配它自己 例子,比如说想要查看密码包含root字符串的&#x…...
React | Center 组件
在 Flutter 中有 Center 组件,效果就是让子组件整体居中,挺好用。 React 中虽然没有对应的组件,但是可以简单封装一个: index.less .container {display: flex;justify-content: center;align-items: center;align-content: ce…...

头歌C++之函数强化练习题
目录 第1关:结构实现复数运算 任务描述 编程要求 第2关:求亲密对数 任务描述 编程要求 第3关:计算一年的第几天 任务描述 编程要求 第4关:正整数求和 任务描述 编程要求 第5关:Pig Latin 任务描述 编程要求 第6关:打印日历 任务描述 编程要求 第1关:结…...

淘宝扭蛋机小程序:开启你的惊喜之旅
随着移动互联网的飞速发展,各种小程序层出不穷,其中,淘宝扭蛋机小程序以其独特的互动性和趣味性,吸引了大量用户。本文将为你详细介绍这款小程序的特色功能、用户体验以及如何使用,助你开启一段惊喜之旅。 一、特色功…...
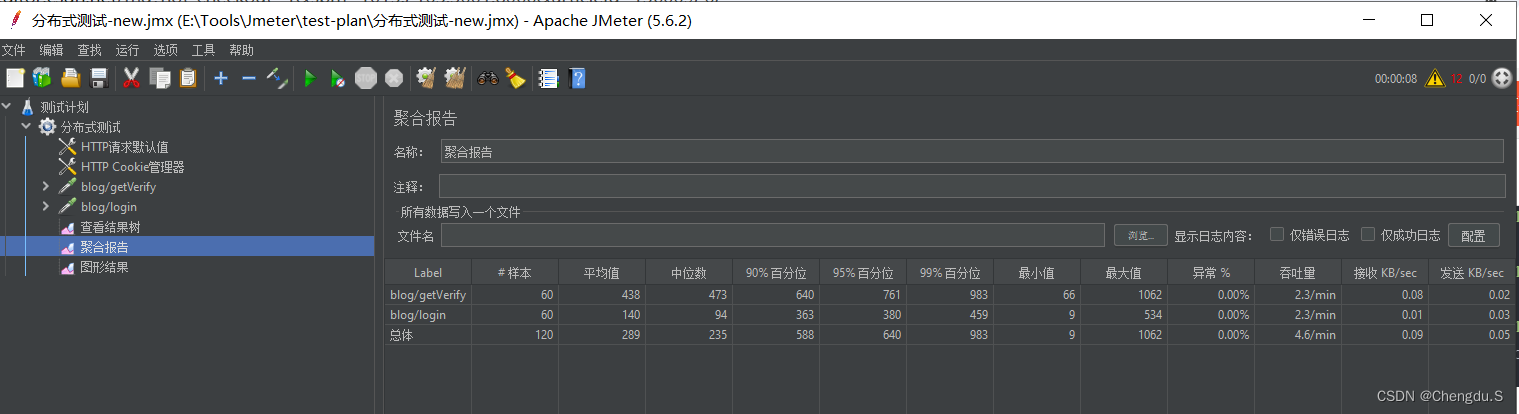
Jmeter 基于Docker 实现分布式测试
基于Docker 实现分布式测试 制作Jmeter基础镜像制作工作节点镜像启动工作节点启动控制节点遇到的问题 使用Docker 部署Jmeter非常方便,可以省略软件的安装以及配置,比如jdk、jmeter。需要部署多个工作节点可以节省时间。 制作Jmeter基础镜像 下载jmeter…...
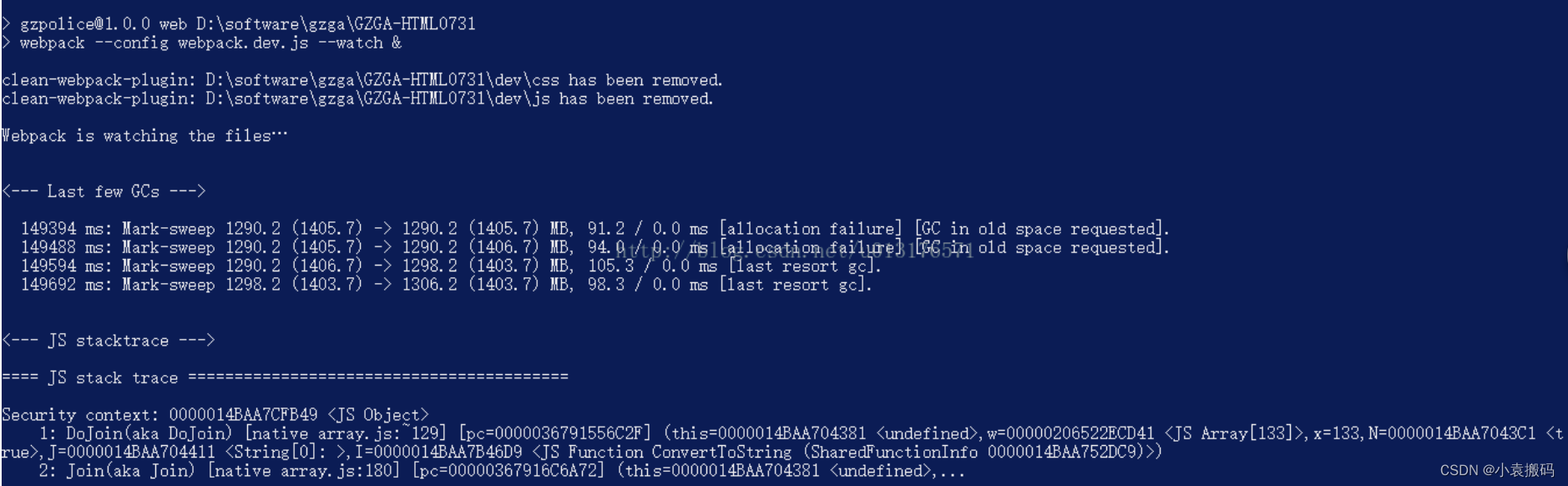
Vite与Webpack打包内存溢出问题优雅处理方式
Vite与Webpack打包内存溢出问题处理 文章目录 Vite与Webpack打包内存溢出问题处理1. Vite1. 打包错误提示2. 命令行方式解决3. 配置环境变量方式解决1. 设置变量2. 配置系统的环境变量 2. Webpack1. 打包错误提示2. 命令行方式解决3. 配置环境变量方式解决1. 设置变量2. 配置系…...

sqlalchemy——@listens_for
问:sqlalchemy如何实现:表中指定数据更新时,其time字段自动更新?答:使用listens_for 装饰器来注册事件监听器,确保在项目数据更新时触发相应的处理逻辑。 示例代码如下: # coding: utf-8 impo…...
MySQL进阶之锁(全局锁以及备份报错解决)
锁 全局锁 全局锁就是对整个数据库实例加锁,加锁后整个实例就处于只读状态,后续的DML的写语句,DDL语 句,已经更新操作的事务提交语句都将被阻塞。 其典型的使用场景是做全库的逻辑备份,对所有的表进行锁定ÿ…...

C#实现windows系统重启、关机
1、C#实现windows系统重启、关机 实现原理,使用系统shutdown命令执行: 强制关机: shutdown -s -f -t 0 强制重启: shutdown -r -f -t 0 2、关于shutdown命令详解: C#实现控制Windows系统关机、重启和注销的方法&…...

JS中Set和Map用法详解
目录 1、Set 1.基本用法 2.Set 实例的属性和方法 3.遍历操作 2、Map 1、Set 1.基本用法 ES6 提供了新的数据结构 Set。它类似于数组,但是成员的值都是唯一的,没有重复的值。 Set本身是一个构造函数,用来生成 Set 数据结构。 const s …...
使用nginx对视频、音频、图片等静态资源网址,加token签权
目前很多静态资源,都可以无权限验证,进行访问或转发,对有价值的资源进行签权,限制转发无法在代码中实现拦截,我们可以使用nginx对视频、音频、图片等静态资源网址,加token签权 如: http://192…...

[每周一更]-(第86期):NLP-实战操作-文本分类
NLP文本分类的应用场景 医疗领域 - 病历自动摘要: 应用: 利用NLP技术从医疗文档中自动生成病历摘要,以帮助医生更快速地了解患者的状况。 法律领域 - 法律文件分类: 应用: 使用文本分类技术自动分类法律文件…...
【Springcloud篇】学习笔记五(十章):Gateway网关
第十章_Gateway新一代网关 1.Gateway简介 1.1官网 上一代zuul 1.X:https://github.com/Netflix/zuul/wiki 当前gateway:https://cloud.spring.io/spring-cloud-static/spring-cloud-gateway/2.2.1.RELEASE/reference/html/ 1.2是什么 SpringCloud …...
Linux开发工具
前言:哈喽小伙伴们,经过前边的学习我们已经掌握了Linux的基本指令和权限,相信大家学完这些之后都会对Linux有一个更加深入的认识,但是Linux的学习可以说是从现在才刚刚开始。 这篇文章,我们将讲解若干个Linux的开发工…...
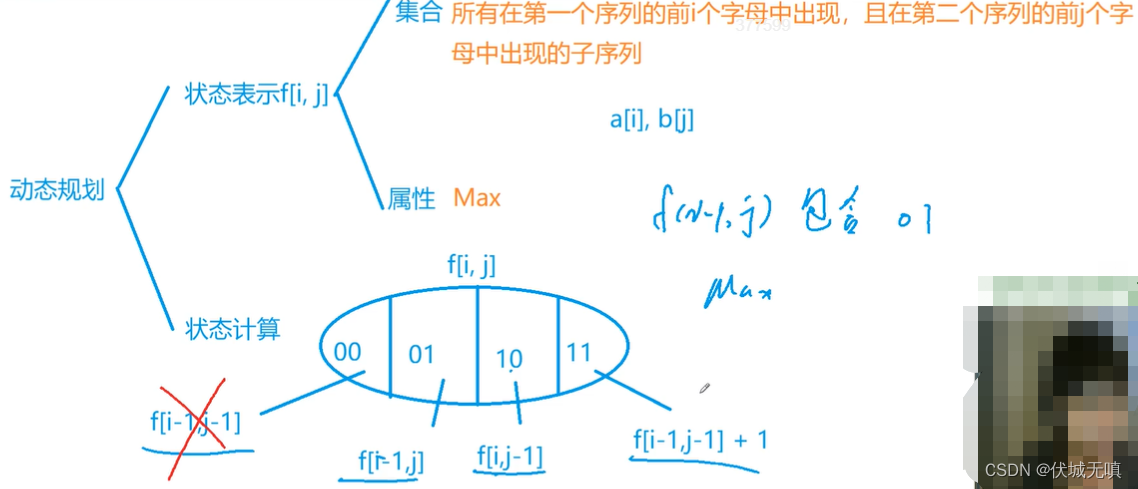
C++ 动态规划 线性DP 最长共同子序列
给定两个长度分别为 N 和 M 的字符串 A 和 B ,求既是 A 的子序列又是 B 的子序列的字符串长度最长是多少。 输入格式 第一行包含两个整数 N 和 M 。 第二行包含一个长度为 N 的字符串,表示字符串 A 。 第三行包含一个长度为 M 的字符串,表…...

【备战蓝桥杯】——循环结构终篇
🌈个人主页: Aileen_0v0 🔥热门专栏: 华为鸿蒙系统学习|计算机网络|数据结构与算法 💫个人格言:“没有罗马,那就自己创造罗马~” #mermaid-svg-yl4Tqejg4LkjZLAM {font-family:"trebuchet ms",verdana,arial,sans-serif;font-siz…...

为什么说Python语法简单?
Python被广泛认为是一种语法简单、易学易用的编程语言,这种观点有几个关键的原因: 1、清晰简洁的语法结构: Python采用了清晰而简洁的语法结构,使得代码易于阅读和理解。Python的语法设计强调代码的可读性,采用了清晰…...
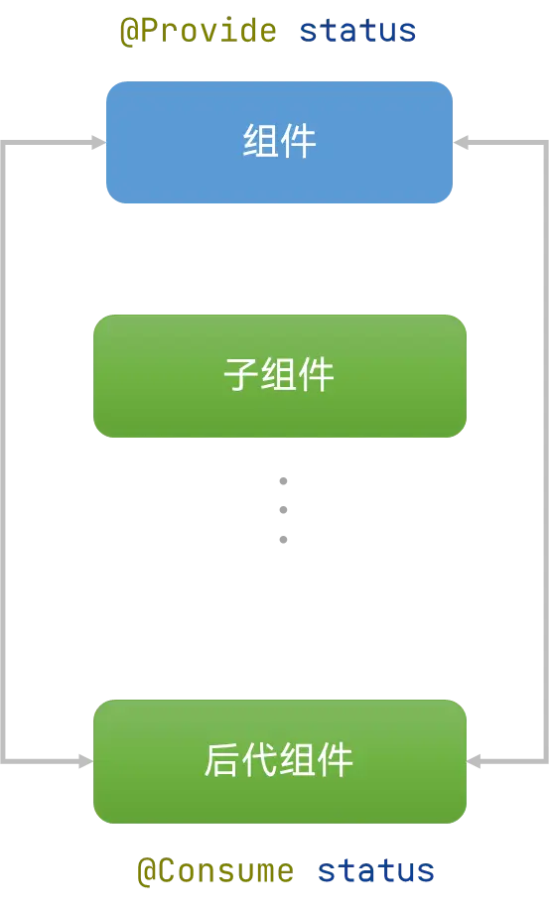
【HarmonyOS应用开发】ArkUI 开发框架-进阶篇-管理组件状态(九)
管理组件状态 一、概述 在应用中,界面通常都是动态的。下图所示,在子目标列表中,当用户点击目标一,目标一会呈现展开状态,再次点击目标一,目标一呈现收起状态。界面会根据不同的状态展示不一样的效果。 Ar…...

AI助盲新体验:CYBER-VISION零号协议快速上手与效果展示
AI助盲新体验:CYBER-VISION零号协议快速上手与效果展示 1. 引言:当科技成为视障者的"第二双眼" 想象一下,当你走在繁忙的街道上,眼前的世界突然变得模糊不清——路边的台阶、迎面而来的行人、突然出现的障碍物都成了潜…...

超维USV-M1000无人船实战:手把手教你搞定元生RTK、元厚测深仪与QGC地面站联调
超维USV-M1000无人船多设备联调实战:从RTK配置到QGC地面站深度整合 当超维USV-M1000无人船从包装箱中取出时,摆在工程师面前的从来不是一台即插即用的设备,而是一个需要精密调校的测绘系统集成平台。这款专为水域测绘设计的无人船,…...

二维码逆向工程:从01二进制到可扫描二维码的完整流程
二维码逆向工程:从01二进制到可扫描二维码的完整流程 二维码已成为现代生活中不可或缺的信息载体,但你是否想过,一串简单的0和1如何转化为可扫描的二维码?本文将带你深入探索二维码的逆向工程世界,从二进制数据处理到图…...

【2026最新】AIGC率从60%降至5%只需零成本?10款免费工具实测红黑榜,一键解锁知网自救通关
四月一到,查重和AIGC检测成了两座大山。 自己熬夜敲的字被判AI生成,或者润色后满篇通红,这绝望感谁懂? 为了搞定论文降aigc这个大坑,我拿手头几篇废稿,去市面上热门的10款降ai率工具滚了一圈。今天这篇吐…...
)
保姆级教程:手把手教你用LIOSAM跑通自己的数据集(含常见报错解决)
从零到一:LIOSAM实战指南与避坑手册 1. 环境配置与数据准备 LIOSAM作为激光-惯性紧耦合SLAM系统,对硬件和软件环境有特定要求。我们先从基础环境搭建开始: 系统要求: Ubuntu 18.04/20.04(推荐20.04)ROS Noe…...

FANUC机器人焊接产线故障急救手册:从SRVO-062到SPOT-012的20个报警代码实战解析
FANUC机器人焊接产线故障急救手册:从SRVO-062到SPOT-012的20个报警代码实战解析 凌晨三点的车间警报声格外刺耳,焊接机器人突然停止工作,示教器屏幕上跳出的SRVO-062代码让值班工程师瞬间清醒。这不是教科书里的理论故障,而是汽车…...
)
Java Swing 实战:手把手教你写一个拼图小游戏(一)
1.前言本文基于 Java Swing 实现带登录注册的拼图小游戏(跟随 B 站黑马程序员教程练习),适合 Java 初学者、课设练手使用。本文为系列第一篇,主要讲解项目整体结构、登录界面(LoginJFrame)和注册界面&#…...

如何用EmuDeck解决Steam Deck模拟器配置难题:给复古游戏玩家的一站式解决方案
如何用EmuDeck解决Steam Deck模拟器配置难题:给复古游戏玩家的一站式解决方案 【免费下载链接】EmuDeck Emulator configurator for Steam Deck 项目地址: https://gitcode.com/gh_mirrors/em/EmuDeck 在Steam Deck上畅玩经典游戏本应是件轻松愉快的事&#…...

5个实战技巧深度掌握KeymouseGo跨平台自动化工具
5个实战技巧深度掌握KeymouseGo跨平台自动化工具 【免费下载链接】KeymouseGo 类似按键精灵的鼠标键盘录制和自动化操作 模拟点击和键入 | automate mouse clicks and keyboard input 项目地址: https://gitcode.com/gh_mirrors/ke/KeymouseGo 在现代工作流程中…...

NCM文件解密工具:三步解锁网易云音乐加密音频
NCM文件解密工具:三步解锁网易云音乐加密音频 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 还在为网易云音乐下载的歌曲无法在其他播放器上播放而烦恼吗?你是否遇到过精心收藏的音乐只能在特定软件中聆听的…...