【论文解读】Collaboration Helps Camera Overtake LiDAR in 3D Detection
CoCa3D
- 摘要
- 引言
- Collaborative Camera-Only 3D Detection
- Collaborative depth estimation
- Collaborative detection feature learning
- 实验
- 结论和局限
摘要
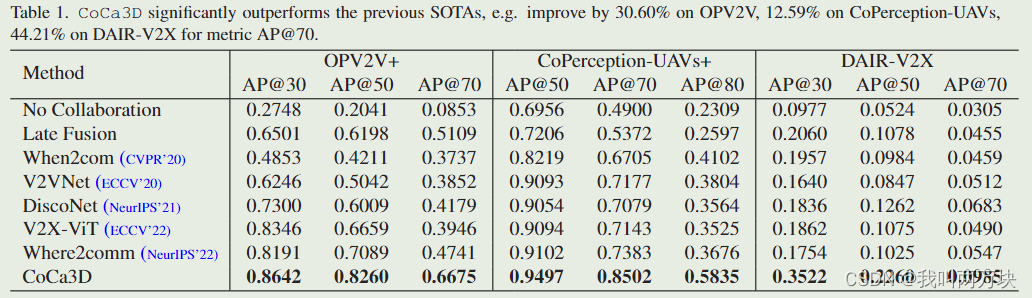
与基于 LiDAR 的检测系统相比,仅相机 3D 检测提供了一种经济的解决方案,具有简单的配置来定位 3D 空间中的对象。然而,一个主要的挑战在于精确的深度估计,因为输入中缺乏直接的3D测量。许多以前的方法试图通过网络设计来改进深度估计,例如可变形层和更大的感受野。这项工作提出了一个orthogonal direction,通过引入多智能体协作来改进仅相机的 3D 检测。我们提出的仅协作相机的 3D 检测 (CoCa3D) 使代理能够通过通信相互共享互补信息。同时,我们通过选择信息量最大的线索来优化通信效率。来自多个视点的共享消息消除了单智能体估计深度的歧义,并补充了单智能体视图中被遮挡和远程区域。我们在一个真实的数据集和两个新的模拟数据集上评估 CoCa3D。结果表明,CoCa3D 在 DAIR-V2X 上比之前的 SOTA 性能提高了 44.21%,OPV2V+ 提高了 30.60%,CoPerception-UAV+ 提高了 1.59%,AP@70。我们的初步结果表明,在有足够的协作的情况下,相机可能会在某些实际场景中过度接受 LiDAR。我们发布了数据集和代码。
引言
在本文中,我们提出了一个orthogonal direction,通过引入多智能体协作来提高仅相机的3D检测性能。假设在先进的通信系统的支持下,只配备摄像头的多个代理可以相互共享视觉信息。
【orthogonal direction】是指一种与现有方法不同的方法或方向。在这篇论文中,作者提出了一种通过引入多智能体协作来提高相机仅3D检测性能的正交方向。这种方法与现有的基于网络设计的方法不同,通过允许智能体共享互补信息,从而提高3D检测性能。
这将带来三个突出的好处。
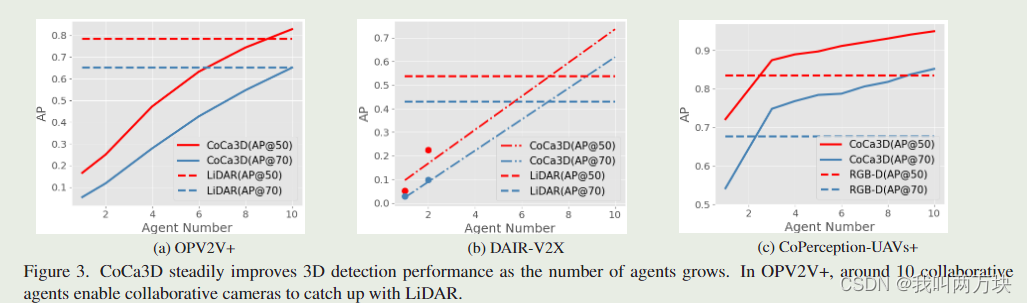
- 首先,来自多个代理的不同视点可以在很大程度上解决仅相机3D检测中的深度模糊问题,从而在深度估计方面与昂贵的激光雷达弥补差距。
- 其次,多智能体协作避免了单智能体3D检测中不可避免的局限性,如遮挡和长距离问题,并有可能实现更全面的3D检测;即检测3D场景中存在的所有对象,包括超出视觉范围的对象。由于激光雷达的视场也有限,这可能使协作相机的性能优于激光雷达。
- 第三,由于相机比激光雷达便宜,大型车队的总费用显著降低。
然而,多智能体协作也带来了新的挑战。与许多多视角几何问题不同,这里我们还必须关注通信带宽限制。因此,每个代理都需要选择信息量最大的线索来共享。
根据这一设计原理,我们提出了一种新的协作式纯相机3D检测框架CoCa3D。它包括三个部分:
- i)单智能体仅摄像头的三维检测,实现了对每个智能体的基本深度估计和三维检测;
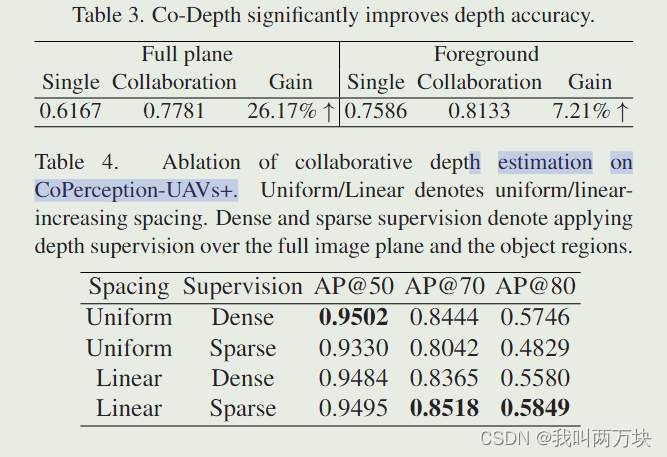
- ii)协作深度估计,其通过促进跨多个代理的视点的空间一致性来消除所估计的深度的歧义;
- iii)协同检测特征学习,其通过彼此共享关键检测消息来补充检测特征。
我们的主要贡献:
- 我们提出了一种新的协作式仅摄像头3D检测框架CoCa3D,它通过多智能体协作提高了摄像头的检测能力,促进了更全面的3D检测。
- 我们提出了核心通信高效协作技术,该技术探索空间稀疏但关键的深度信息,并通过融合来自不同视角的互补信息来解决深度模糊、遮挡和长期问题,实现更准确和完整的3D表示。
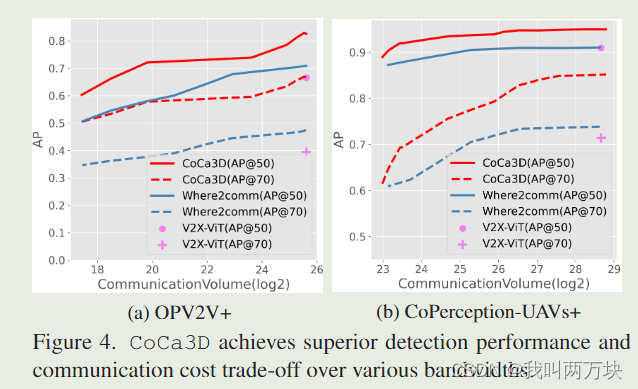
- 我们用更多的代理扩展了之前的两个协作数据集,并进行了广泛的实验,验证了i)CoCa3D在OPV2V+和DAIR-V2X上显著弥合了相机和激光雷达之间的性能差距;以及ii)CoCa3D实现了最先进的性能-带宽折衷。
Collaborative Camera-Only 3D Detection
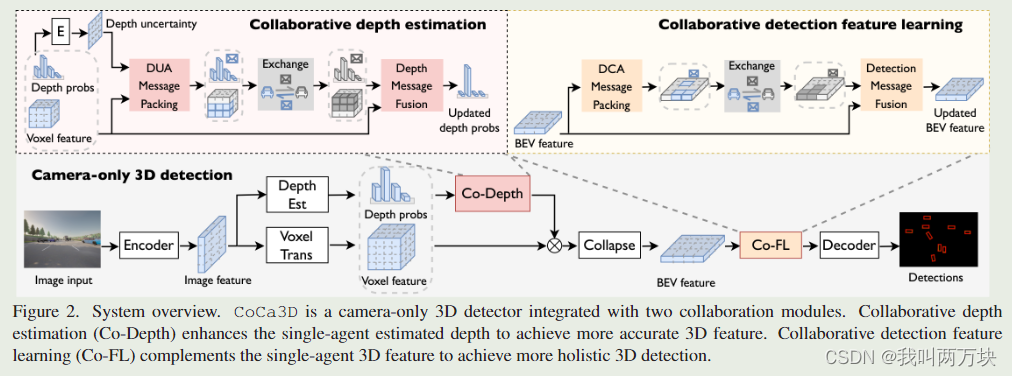
【CoCa3D是一个只有摄像头的3D探测器,集成了两个协作模块。协同深度估计(Co-Depth)增强了单智能体估计深度,以获得更准确的3D特征。协同检测特征学习(Co-FL)是对单智能体3D特征的补充,可以实现更全面的3D检测。】
我们的设计思路来自两个方面:
- 第一,由于摄像头和LiDAR的主要差距是深度,所以信息中应该包含深度信息。这将允许来自多个代理的不同观点消除无限深度可能性的歧义并定位正确的深度候选。
- 其次,消息中应该包含检测线索,以提供互补的检测信息,这可以从根本上克服单智能体检测不可避免的局限性,如遮挡和远程问题。
Collaborative depth estimation
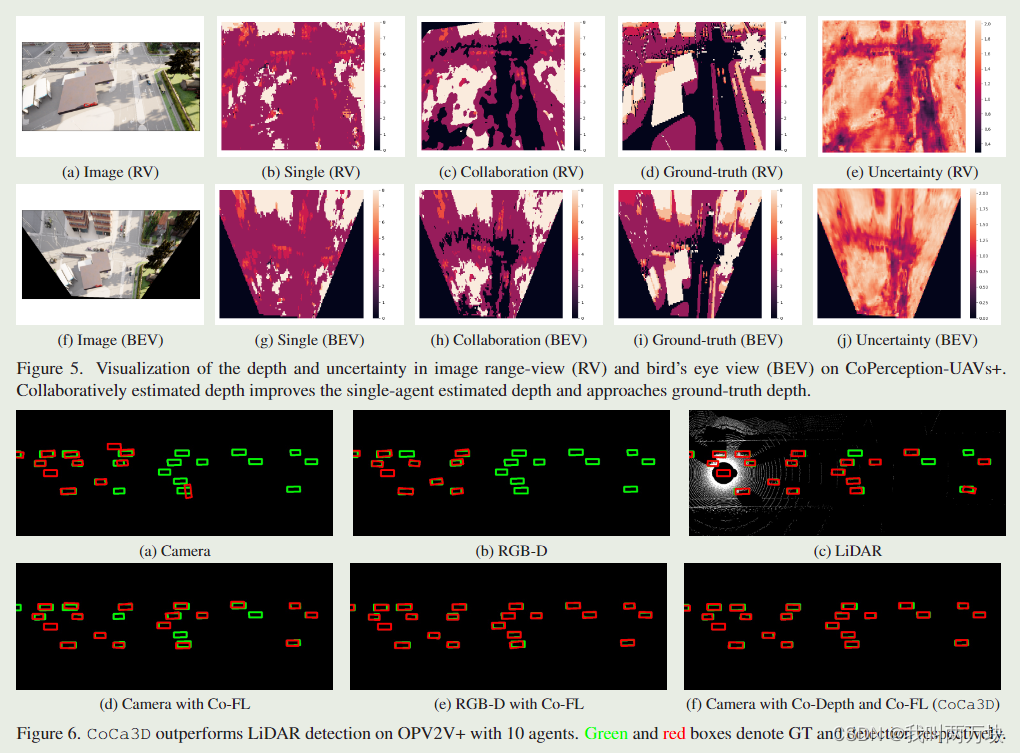
协同深度估计(Co-Depth)的目标是消除单智能体相机深度估计中无限深度可能性的歧义,并通过多视图一致性定位正确的候选深度。直觉是,对于正确的深度候选,其对应的3D位置应从多个智能体的视点在空间上保持一致。为此,各个agent可以通过通信交换深度信息。同时,我们通过选择最关键、最明确的深度信息来提高通信效率。因此,Co-Depth包括:
-
a)深度不确定性感知的消息打包,它将具有明确深度信息的紧凑消息打包;
【深度不确定性感知报文封装(DUA)基于深度不确定性将用于多视图一致性的最关键深度信息打包到待发送报文中。深度信息包括:i)体素特征,用于多视图视觉相似性测量;ii)深度概率,表示特征像素属于体素的置信度,用于多视图候选选择。】 -
b)深度信息融合,利用接收到的深度信息增强深度估计
【深度信息融合的目标是在多个智能体不同视点接收深度信息的情况下增强深度估计。直觉是,对于一个正确的深度候选,多个代理在同一3D点观察到的视觉特征应该是相似的。为了实现这一点,我们引入了多视图深度一致性加权(匹配分数)。】
Collaborative detection feature learning
协作深度估计仔细地细化了深度,并为每个单个代理提供了更准确的3D表示。然而,单智能体的物理局限性,如视野受限、遮挡和远程问题仍然存在。为了实现更全面的三维检测,各个agent应该能够交换三维检测特征并利用互补信息。同时,我们通过选择感知上最关键的信息来提高沟通效率。因此,协同检测特征学习(Co-FL)包括:
- a)检测置信度感知的消息打包,即在检测置信度的指导下对空间稀疏但感知上至关重要的3D特征进行打包;
【检测置信度感知(DCA)消息打包的目标是将互补的感知信息打包成一个紧凑的消息。其核心思想是探索感知信息的空间异质性。直觉是,包含对象的区域比背景区域更重要】 - b)检测信息融合,利用接收到的检测信息增强三维特征。
【这里我们通过聚合从其他代理接收到的检测消息来增强每个代理的检测特征。我们用简单而有效的非参数逐点最大融合实现了这一点。】
实验
结论和局限
我们提出CoCa3D,一种新颖的协作相机3D检测,接近整体3D检测。其核心思想是引入多智能体协作来提高摄像机的检测能力。同时,对通信成本进行优化,每个agent仔细选择空间稀疏但深度关键的消息进行共享。广泛的实验涵盖了现实世界和模拟场景,以及多种类型的代理(汽车,无人机和基础设施),表明CoCa3D不仅实现了最先进的感知带宽权衡,而且在OPV2V+上超过了基于lidar的探测器,具有足够数量的协作代理。
局限性和未来的工作:收集真实世界的多智能体感知数据集是非常昂贵的。到目前为止,DAIRV2X是唯一一个公开的真实世界数据集,它只有一辆车和一个路边单元。本工作主要利用仿真数据来验证所提出的新方法,并勾画出一个有前景的研究方向。我们提倡为真实世界的数据收集提供更多的资源
相关文章:
【论文解读】Collaboration Helps Camera Overtake LiDAR in 3D Detection
CoCa3D 摘要引言Collaborative Camera-Only 3D DetectionCollaborative depth estimationCollaborative detection feature learning 实验结论和局限 摘要 与基于 LiDAR 的检测系统相比,仅相机 3D 检测提供了一种经济的解决方案,具有简单的配置来定位 3…...

【Python实战】Python多线程批量采集图片
前言 本文来介绍如何多线程采集图片,多线程效率更快,但是,我们单一IP请求过于频繁,可能会被反爬,被封IP,所以,我们就要用到IP代理池,这里,我给大家推荐一个,可…...

【JavaEE spring】SpringBoot 统一功能处理
SpringBoot 统一功能处理 1. 拦截器1.1 拦截器快速⼊⻔1.2 拦截器详解1.2.1 拦截路径1.2.2 拦截器执⾏流程 1.3 登录校验1.3.1 定义拦截器1.3.2 注册配置拦截器 2. 统⼀数据返回格式2.1 快速⼊⻔2.2 存在问题2.3 案例代码修改2.4 优点 3. 统⼀异常处理 1. 拦截器 后端程序根据…...

小猪o2o生活通系统更新到了v24.1版本了php文件开源了提供VUE了但是车牌识别功能你真得会用吗
一.车牌识别设置项 车牌识别设置项总开关:系统后台-社区管理-社区配置-车牌识别配置。 平台需要开启车牌识别功能,其次平台可以选择车牌识别功能是由平台配置还是小区自己配置有需要提供代码的可以Q我昵称注明:CSDN网友。如果是平台自己配置&…...

Servlet+Ajax实现对数据的列表展示(极简入门)
目录 1.准备工作 1.数据库源(这里以Mysql为例) 2.映射实体类 3.模拟三层架构(Dao、Service、Controller) Dao接口 Dao实现 Service实现(这里省略Service接口) Controller层(或叫Servlet层…...
汽车租赁系统
目录 一.研究背景 二.系统架构 1、SSM 2、JAVA 3、MySQL 4、系统架构 三.系统功能 1、车辆管理 2、客户管理 3、销售管理 4、统计分析 四.系统实现 五.结论总结 一.研究背景 传统的销售与信息统计管理都主要依靠人工,处理出的销售数据量与使用管理系统…...

随笔:回家过年
每一年的年底,伴随着气温的降低,大家开始逐渐增加了返乡的热情。风雪、堵车阻挡不住从各大一线城市归家的思绪。 这种年底大迁徙是中国人对家的执着。有钱没钱回家过年。随着年龄的增加,回家其实是只是做回孩子。脱下了城市里的正装ÿ…...
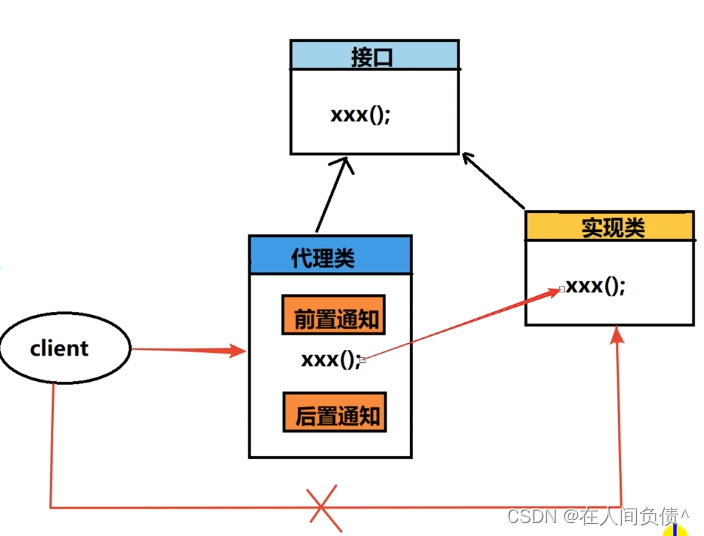
代理模式(静态代理、JDK 动态代理、CGLIB 动态代理)
代理模式(静态代理、JDK 动态代理、CGLIB 动态代理) 一、代理模式概述1. 生活中的代理案例2. 为什么要使用代理3. 代理模式在 Java 中的应用4. 概述5. 生活中代理图示二、代理的实现方式1. Java 中代理图示2. 静态代理2.1 案例2.2 实现案例2.3 静态代理存在的问题三、动态代理…...
)
【nginx实战】通过nginx实现http 长连接(即keep alive)
文章目录 一. http的长连接历史1. HTTP短连接模型2. HTTP长连接模型 二. nginx作为代理时实现HTTP长连接1. nginx与client的长连接1.1. keepalive_timeout指令1.2. keepalive_requests指令* 场景分析 2. 保持和server的长连接2.1. location设置* 场景分析 2.2. upstream设置* 场…...

通用函数
目录 处理null 多数值判断 Oracle从入门到总裁:https://blog.csdn.net/weixin_67859959/article/details/135209645 Oracle 提供了两个简单的数据处理函数: nvl()、decode()。在版本升级的过程中,这两个函数又衍生出了许多子函数 处理null 下面首先…...
Linux 查看系统信息 + 服务信息命令(简记)
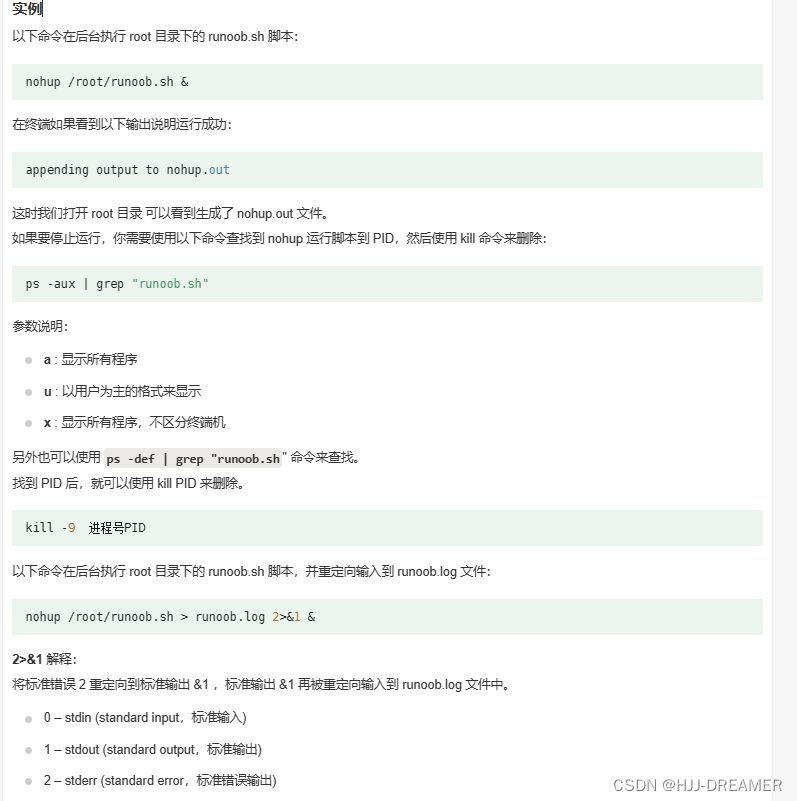
概述 作用:Linux 运维工作中常用的命令速查 小步教程 (xiaobuteach.com) Linux 命令大全 | 菜鸟教程 (runoob.com) 文本编辑器vim 本章大纲 | 小步教程 vim 多文件编辑 | 小步教程 常用 ps 查看服务启动命令 Linux ps 命令 | 菜鸟教程 (runoob.com) # 查找…...

有了Future为什么还要CompletableFuture?
文章目录 Future 接口理论知识复习Future 接口概述场景描述小结 Future 接口常用实现类 FutureTask 异步任务Future 的作用Futrue 编码测试优缺点分析优点缺点小结 面对一些复杂的任务对于简单的业务场景使用 Future 接口完全 OK回调通知创建异步任务多个任务前后依赖可以组合对…...
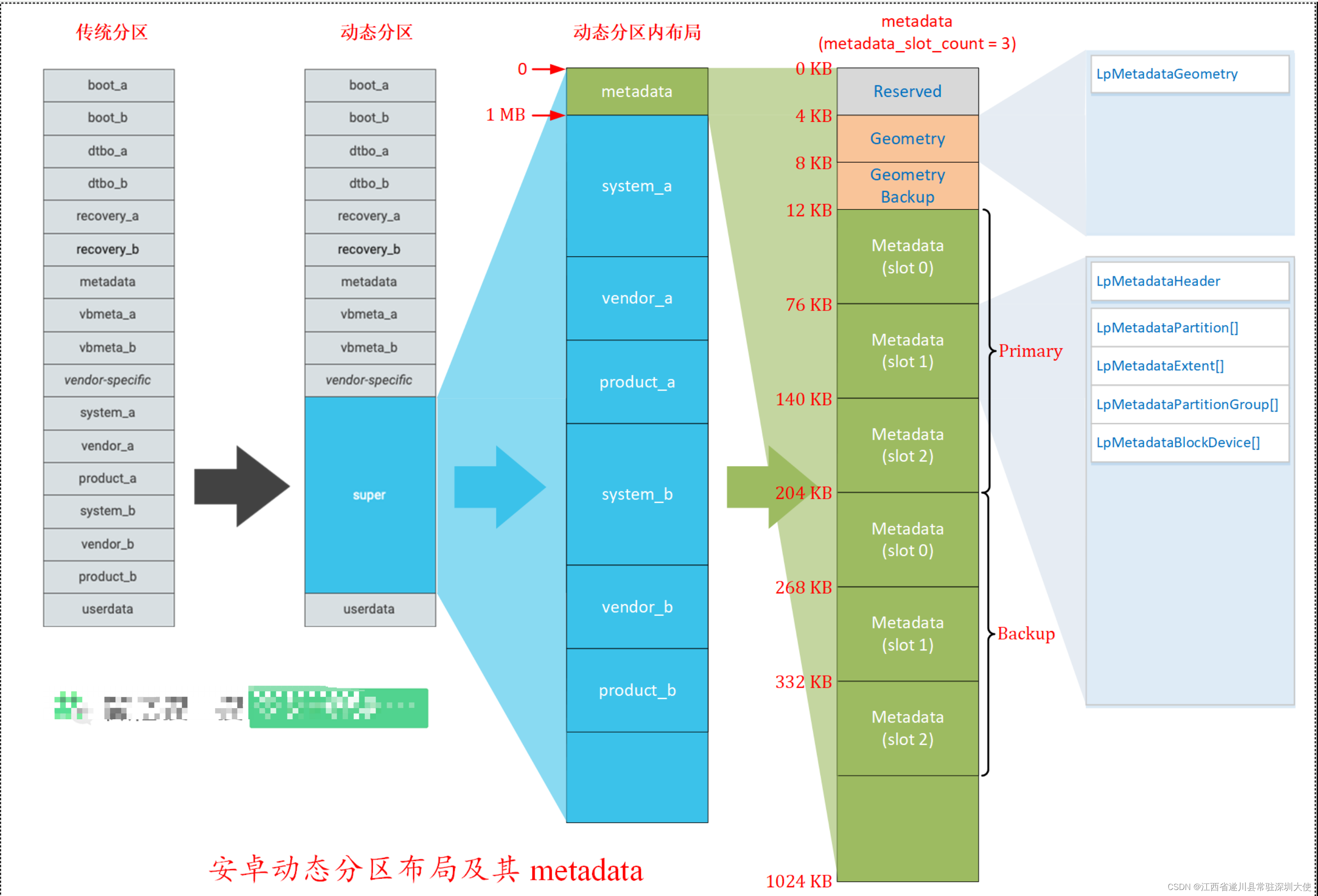
Android super.img解包和打包指南(含工具下载lpunpack、lpmake、lpdump)
本文所有命令均需要在linux 上执行 一、解包 1、将Android sparse image格式的super.img转成二进制文件 $ sudo apt install android-sdk-libsparse-utils $ simg2img super.img super.img.bin 2、下载工具lpunpack 和lpmake、lpdump 以及其依赖库 下载地址:https://downl…...
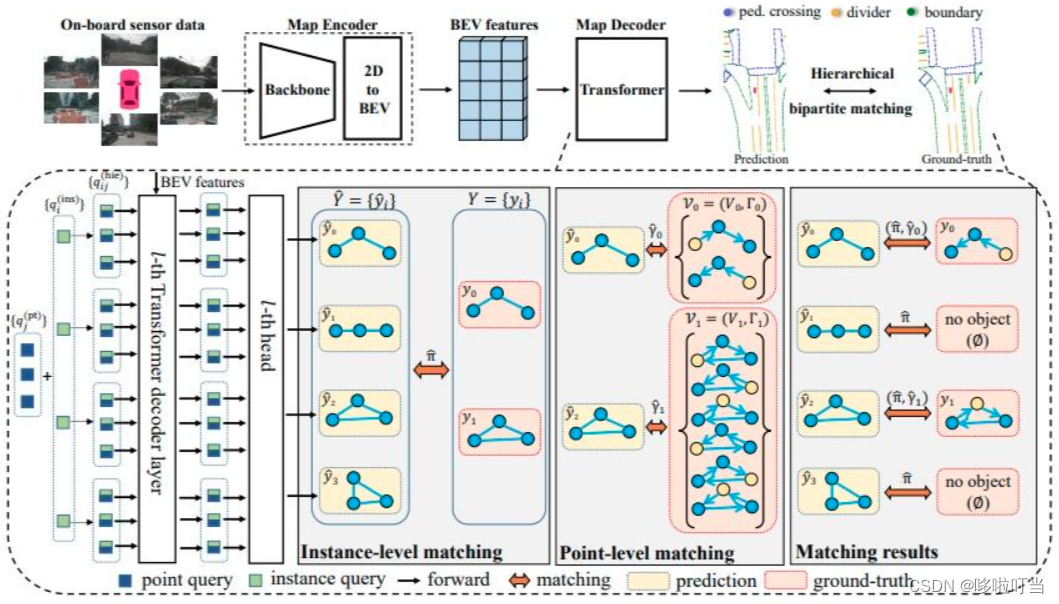
端到端实现高精地图重建(TopoNet解读和横评)
论文出处 [2304.05277] Graph-based Topology Reasoning for Driving Scenes (arxiv.org)https://arxiv.org/abs/2304.05277 TopoNet TopoNet的目标是从车辆上安装的多视角摄像头获取图像,感知实体并推理出驾驶场景的拓扑关系,实现端到端预测…...

系统架构20 - 统一建模语言UML(上)
统一建模语言 组成要素事物关系 在目前的软件开发方法中,面向对象的方法占据着主导地位。面向对象方法的主导地位也决定着软件开发过程模型化技术的发展,面向对象的建模技术方法也就成为主导的方法。 公认的面向对象建模语言出现于20世纪70年代中期。从1…...
数据库学习笔记2024/2/4
随笔 1. 为什么学? 认识数据,熟悉数据,掌握数据。 进企业必备技能。 2. 怎么学? 1、MySQL数据库就是存储和管理数据的一个大型软件,这个软件有一个专门的语言叫SQL,主要学的是SQL语言,但想要达到企业用人标准,就还得学会熟练使用MySQL这个软件。 2、学习分三阶段: 一. …...

Apache POI 处理excel文件 记录用法
Apache POI 写excel public static void write() throws IOException {//再内存中创建了一个Excel文件XSSFWorkbook excel new XSSFWorkbook();//创建一个sheet页XSSFSheet sheet excel.createSheet("info");//这里创建行对象,这里的rownum 是从0开始的,类似于数…...
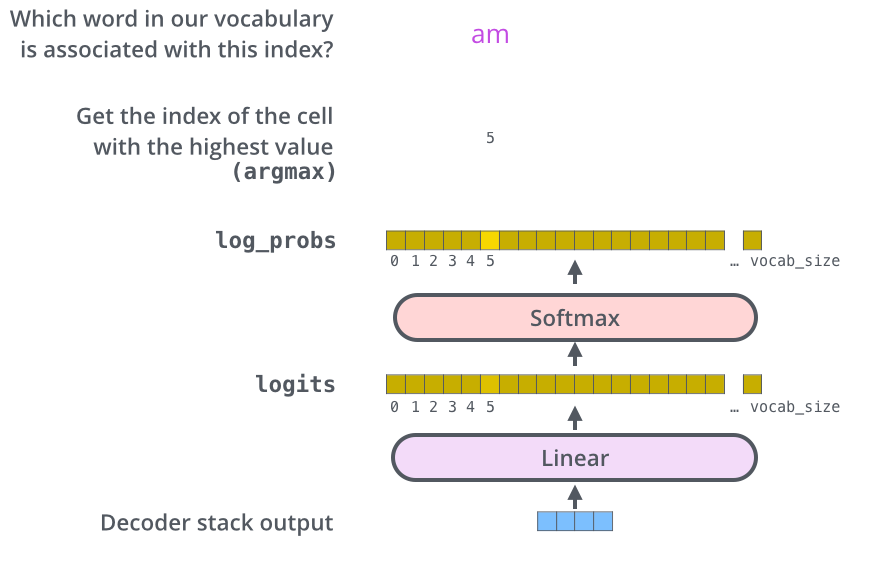
Transformer实战-系列教程2:Transformer算法解读2
🚩🚩🚩Transformer实战-系列教程总目录 有任何问题欢迎在下面留言 Transformer实战-系列教程1:Transformer算法解读1 Transformer实战-系列教程2:Transformer算法解读2 5、Multi-head机制 在4中我们的输入是X&#x…...

python_蓝桥杯刷题记录_笔记_全AC代码_入门3
前言 记录我的解法以及笔记思路,谢谢观看。 题单目录 1.P2141 [NOIP2014 普及组] 珠心算测验 2.P1567 统计天数 3.P1055 [NOIP2008 普及组] ISBN 号码 4.P1200 [USACO1.1] 你的飞碟在这儿 Your Ride Is Here 5.P1308 [NOIP2011 普及组] 统计单词数 6.P1047 […...
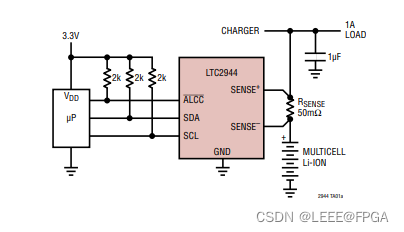
STM32 IIC电量计LTC2944
1 描述 LTC2944 可在便携式产品应用中测量电池充电状态、电池电压、电池电流及其自身温度。宽输入电压范围允许使用高达 60V 的多节电池。精密库仑反向积分电流通过电池正极端子与负载或充电器之间的检测电阻器。 电压、电流和温度由内部 14 位无延迟 ΔΣ™ ADC 测量。测量结…...

【深蓝学院】移动机器人动力学约束下的最优轨迹生成:从理论到实践
1. 移动机器人轨迹规划的核心挑战 移动机器人在复杂环境中导航时,最头疼的问题就是如何在保证安全的前提下,找到最优的运动路径。我做过不少机器人项目,发现很多新手会忽略一个关键点:动力学约束。简单来说,机器人不是…...

bge-large-zh-v1.5在RAG中的应用:sglang快速部署,提升问答准确率
bge-large-zh-v1.5在RAG中的应用:sglang快速部署,提升问答准确率 1. bge-large-zh-v1.5模型概述 bge-large-zh-v1.5是一款专为中文优化的嵌入模型,在检索增强生成(RAG)系统中发挥着关键作用。该模型通过深度学习技术…...

SecGPT-14B镜像快速体验:OpenClaw云端沙盒安全测试方案
SecGPT-14B镜像快速体验:OpenClaw云端沙盒安全测试方案 1. 为什么需要云端沙盒测试安全模型 作为一名长期关注AI安全领域的技术从业者,我一直在寻找能够快速验证安全大模型实际效果的方法。传统方式需要在本地搭建完整环境,不仅耗时耗力&am…...

InstructPix2Pix实现LaTeX文档图像自动处理
InstructPix2Pix实现LaTeX文档图像自动处理 告别繁琐的手工修图,用自然语言指令让LaTeX文档中的图片自动变完美 写学术论文、技术文档时,最头疼的就是处理图片素材。尺寸不一致、风格不统一、需要添加标注或水印...这些琐碎工作往往占用大量时间。现在&a…...

从EMIF到AXI:详解DSP与FPGA通信接口的演进与选型策略
从EMIF到AXI:异构计算平台接口技术演进与工程决策指南 在异构计算架构设计中,DSP与FPGA的高效数据交互始终是系统性能的关键瓶颈。十年前,工程师们还在为EMIF接口的布线优化绞尽脑汁;如今,AXI总线已成为新一代SoC的标配…...

手把手教你复现ownCloud高危漏洞CVE-2023-49103:从环境搭建到信息泄露验证
从零构建ownCloud漏洞靶场:CVE-2023-49103深度复现指南 当开源云存储系统ownCloud的graphapi组件暴露出PHP环境信息时,意味着什么?想象一下,攻击者通过一个未公开的URL路径,就能获取数据库密码、邮件服务器凭证甚至加密…...

OpenClaw高阶玩法:Qwen3-4B模型微调适配专属自动化流程
OpenClaw高阶玩法:Qwen3-4B模型微调适配专属自动化流程 1. 为什么需要定制化模型? 去年夏天,我尝试用OpenClaw自动化处理一批专业文献时遇到了瓶颈。当AI试图理解"CRISPR-Cas9基因编辑技术"这类术语时,标准模型要么要…...

低成本自动化方案:OpenClaw调用Qwen3.5-9B自建接口全记录
低成本自动化方案:OpenClaw调用Qwen3.5-9B自建接口全记录 1. 为什么选择自建模型接口 去年我尝试用OpenAI的API对接OpenClaw做自动化办公,结果一个月烧掉了200多美元——这还只是处理些简单的文档整理和邮件自动回复。痛定思痛后,我决定探索…...
)
告别手动点点点:用CANoe CAPL脚本全自动刷写ECU固件(附完整代码框架)
告别手动点点点:用CANoe CAPL脚本全自动刷写ECU固件(附完整代码框架) 在汽车电子测试领域,ECU固件刷写是每个工程师都绕不开的必修课。但当你第100次重复相同的UDS服务序列时,是否也曾在深夜的实验室里怀疑人生&#x…...

终极团队协作利器:Synthwave ‘84主题如何实现多人开发环境一致性
终极团队协作利器:Synthwave 84主题如何实现多人开发环境一致性 【免费下载链接】synthwave-vscode Synthwave inspired colour theme for VS Code 🌅🕶 项目地址: https://gitcode.com/gh_mirrors/sy/synthwave-vscode 在现代软件开…...